From: AAAI Technical Report SS-94-04. Compilation copyright © 1994, AAAI (www.aaai.org). All rights reserved.
Error Recovery in Automation - An Overview
Peter Loborg
Department of Computer and information Science
LinkSping University,
S-581 83 Link~3ping, SWEDEN
Phone: (+46) 13 282494 E-mail: plo@ida.liu.se
Abstract
This paper attemptsto providean overviewof techniques
andapproachesto error recovery,both in automationandin
other fields (such as autonomous
robotics) whereanalogousproblemsoccur. Theterm’error recovery’is often
usedas a common
namefor the three sub areas error/fault
detection, error/fault diagnose,andrecoveryfromthe
resultingfailure. All three areas will be covered.
Ratherthan presentingdifferent systemsand approaches
in-depth, different types of systemsandapproacheswill be
presented and compared.
Terminology
Thefirst observationmadeis that there is a lack of common
terminology,e.g. the worderror is sometimes
used to
denote the original reason whysomethingwentwrong,
whereas
in other casesit is usedto denotethe effects in the
computersystemdue to someunforeseenevent.
However,
in the ’reliable computing’community
there is
an emerging
standard[Laprie, 1992].Althoughthey are primarilyinterested in problems
internal to a computer
andits
software, the terminologyis applicablewhentalking about
problemsin a ’real world’controlled by a computer,problemswhichmaymanifest themselvesas discrepancies betweenthe actual state in the real worldandwhatthe computer ’think’ is the actualstate. Thefollowing
definitionswill
be usedthroughoutthis paper:.
fault the original source of any problem,such as a
brokenair pressurevalveor assemblypart out of
tolerances, whichmayled to an error directly or
indirectly.
error is a differencebetweenwhatis specifiedand
whatis actuallythere. It maybe latent (the systemhas not recognizedit as such)or detectedby
a detection mechanism
(often called monitor).
Thus,in a control system,an error is an observable discrepancybetweenthe actual state (the
state in the controlledsystem)andthe internal
representationof the intendedstate.
94
failure occurswhenan error affect the service delivered
froma systemin anyway,e.g. the robot is unable to continuethe graspingoperationsince
someonehaveremovedthe object in question.
Finally,(completing
the chainof effects) if the
component
that experiencea failure is a part of a
systemof components,
the result is a fault in the
systemwhichcontains the falling component.
Usingthis terminology,it is evidentthat whatis commonly
describedas error recovery(such as catchinga signal on
divisionby zero) is really failure recovery,althoughit
wouldbe desirable to handlethe problembefore it manifests itself as a failure, i.e. to havetrue error recovery
(detect the presenceof a zero anddo something
about it
beforeit is usedin a division). Systems
whichare able to
handlean error withoutaffectingthe service deliveredare
called fault tolerantsystems.
Thefield of error recoveryis often dividedin three subfields:
detection techniquesfor (or the processof) observing
the actual state of the controlledsystemand
comparing
it withspecificationsin order to find
discrepanciesas early as possible.
diagnosetechniquesfor finding the original fault which
causedthe error.
recoveryapplyingthe propercorrective actions in order
to preventa possiblefuture error or reachan
error free state.
In eachof these subfieldsthere are severalprinciplesfor
howto achievethese objectives,as well as different methods for representingthe informationneeded.
Classification
Thefollowingclassification parameterswill serve as a
frameworkfor the comparisonof approachesand techniques. Although
it is not alwayspossible, subjective
parametershas beenavoidedas far as possible. Thusno
approachwill be classified as beingthe ’best’, since such
an evaluationis dependenton the applicationandthe motivationfor usinga specific approachin that application.
When
presentingdifferent approachesof error recovery,
a basic categorisationis whethera forwardor backward
error recoveryapproachis used.Thedefinitionfor these terms
are ([Laprie,1992;Noreils,1990]):
backwarderror recovery:Find an earlier (previously
passed)error free state of the systemandreturn
there, by ’undoing’whathas beendonesince.
Examples
of general techniquesusing this
approachare recovery blocks [Kimand Welch,
1989]and transactions [Harderand Reuter,
1983].
forwarderror recovery:Findan error free state that the
systemis supposedto eventuallyreach, andperformactionsto reachthat state. This is often
doneusingpredefinedalternative actions or
replanningof whatactions to use to achievethe
’goal’ [Chenand Trivedi, 1991;Noreils, 1990].
Othercriteria whichhaveimplicationson the systemperformance
as wellas its flexibility are:
Knowledgesources: The information (or knowledge)
used mayoriginate fromseveral knowledge
sources, suchas fromthe original code, froma
descriptionof whatto perform,fromstatistically
aquiredinformationabout relations between
error causesandeffects in the systemas well as
the propercorrective action. This knowledge
mayalso be manuallyspecified after analysis of
the system.
Application dependence: The knowledgeas such may
be moreor less application dependent,which
haveimplicationsfor the reusability of the
knowledge.
Knowledgerepresentation: The knowledgeused may
be representedin several different formalisms,
suchas rules, alternativecodeor pieces of plans
to use, graphsdescribingdecisiontrees etc.
Notablehere is that several of these formalisms
maybe combined,or translated fromone form
into another.
Techniques for error recovery
In this sectiondifferentaspectsof error recoverywill be
presentedanddiscussed.Firstly, techniquesfor the detection of a fault is discussed,followedby diagnoseand
recoverytechniques.
ble, since the degreeof observabilityof a systemmaynot
correspondto the richness in the modelof the system.The
followingtechniquesaddressthis problem.
Sensorysignatureis a termusedby[Leeet. al., 1983]to
denotea collection of parameterswhichspecifythe limits of
acceptabilityof a sensedsignal duringa specific task phase.
Theresult is that sensormonitoringis guidedby currentaction, not onlyin a binaryfashion(shouldit be monitored
or
not) but also qualitatively(howtight are the limits, howoften shouldtheybe verified).
Gini ([Gini, 1893])uses a worldmodelto representthe
activity in a robot system.This worldmodeland the operations on it is generatedfromthe original robotprogram,and
for eachoperationexecutedin the robot a corresponding
semanticoperationis executedin the worldmodel.If the resuits differ (the worldmodelcontainingthe expectedoutcomecompared
to the sensedstate of the world)there is an
error. Whatsensors to use is guidedby expectedchangesas
well as expectedlack of changes.
In [Hayes-Roth,1990], BarbaraHeyes-Roth
uses a focus
of attentionprinciplein a life supportandmonitoring
system to discriminate betweenwhichparametersto monitor
moreclosely andnot. This focusis guidedby rules according to whattask is performed,current loadin the system,
andmayalso (in case of overflowof sensordata) imposefiltering strategies on sensorchannels.Theknowledge
usedis
currently’hard-wired’,applicationdependenta priori
knowledge.
ObservationsThesethree examplesshowsthat there exists feasible techniquesfor detection,providedthat there is
a goodobservabilityof the system,that is that thereare sensors enoughto monitormostof the tasks. Notableis that the
knowledge
used to guide the monitoringin Gini’s approach
is extracted from the program,knowledgewhichthe user
mustsupplyexplicitly in the other twoapproaches.In Lee’s
approach,the knowledgeis input twice (althoughin somewhatdifferent forms)- bothin the ’original’ programandin
the monitoringsystem.
Guidingthe monitoringtask in planningsystemsis often
a variant of Gini’sapproach,andis thus not includedhere.
Omittedin this presentationis also techniquesfor howto
implement
monitoringof different types of signals, since
this is out of the scopeof this paper.However,
an overview
can be foundin [Iserman,1984]and[Frank, 1990].
Diagnose
Detection
In orderto avoidcostlyfailures, it is desirableto detectthe
presenceof faults as early as possible.Theconstantverification of absenceof errors is costly andnot alwayspossi-
95
Diagnose
is the processof identifyingthe causeof the error
(or failure). Theidentifcationstarts byverifyingthe presenceor absenceof selected sensordata values,often called
features. Theresult of the diagnosisis a set of explanations
for the error, i.e. a set of possiblefaults.
Failuretree [Srinivas, 1977;Srinivas, 1978]:Earlywork
by Srinivas presents a methodwherepredefinedknowledge
aboutpossiblefaults for eachaction(rules testing sensors
andfacts trying to explainwhythe action failed) andthe
currentstate of executionis usedto build a decisiontree of
tests for ’features’upona failure. Thistree is thenusedto
diagnosethe situation. Themethodalso uses the information availablein the interruptedexecutionto trace situations
wherethe error couldbe a result of a previousor parallel action. This is accomplished
by examingthe preconditionsof
all interrupted actions. Depending
on the outcomeof that
examination,the corresponding
error rules are also included.
Since Srinivas methodis computationallyexpensive,it
wouldbe favourableto ’remember’
the errors that actually
occuredin an applicationandtheir cause, andstore themin
a computationallymoreefficient form. Thetechniquefor
doing so has beentermed machinelearningI [Changand
DiCesare,1989;Changet. al., 1990a;Changet. al., 21990b]
andis usedto produceheuristic rules whichgivena failed
action, tests for the presenceandabsenceof certain features
knownto discriminate betweenpossible explanations. The
techniqueis basedon an initial knowledge
about possible
errors for an action, andfor eacherror bothprobableand
definite featuresfor that error. In the casewhenthe system
finds multipleexplanations,it produces
a tentative heuristic
rule that maybe confirmedor ruled out whenmoreknowledgeis acquired"fromexperiments,modelsor other sources".
ProbabilityVectors[TaylorandTaylor, 1988;Tayloret.
al., 1990]is an alternativetechniquewherestatistical a priori knowledge
aboutthe systemis used. Eachpossible fault
is associatedwith the probabilityof its occurence,and
storedin a vector.Thisis repeatedfor all possibleeffects
(errors), all modelparametersandall sensors,resulting
four vectors containingprobability estimations.Connection
matricesdescribesa weightedrelationship betweenfaults
and errors, errors andparameters,parametersand sensors.
Usingthis information,it is possibleto compute
a set of
probablecausesfor a givenerror, whatsensorsto use to verify an error as wellas (at least in theory)guidingthe process
of instrumentinga workcell with sensorsto achieverelevant observability.
Alternativeapproachesto diagnosecan be foundin other
domains(such as AI in Medicine,e.g. see [Zhang,1993]).
Theyare often called modelbasedor consistencybased,
since theycontaina qualitative descriptionof the system.
This description, or model,expressedin somelogical forrealism, describes each components
normalbahaviourand
howmodulesinteract. If an observationof an actual system
1. Should not be mixed up with ’true’ machinelearning such as
neural nets.
2. Extends and complementsprevious work such as [Changet. aL,
1989] and [Pazzani, 1986; Pazzani, 1987].
96
state is addedto the descriptionsuchthat the descriptionbecomesinconsistent,there is an error present. Byidentifying
whichcomponent
(or components)
that in conjunctionwith
the observationresults in a contradiction,the set of explanations (faulty components)
havebeenfound. Theexpalnation
is complete,the diagnosecan handlemultiplefaults and
mayevenreviel previously unknown
faults [deKleerand
Williams,1987;Reiter, 1987]. However,it mightsometimes proposeawkward
explanationssince it lacks knowledgeaboutpossibleerrors, or rather, causalrelations.
Addingfaultmodels
[deKleer and Williams,1989; Struss
andDressier, 1990]to the descriptionimprovesthe explanation, but the explanationis nolonger guarantiedto be complete. Thesystemmaynowlabel components
as faulty, correct or either - meaning
it can not decidewhich.
Observations The techniques for diagnose presented is
just a smallsampleof whatcan be foundin the literature.
Characteristicfor the first examples
(failure trees withmodifications andprobabilityvectors) is that the knowledge
is
shallow,that is it is composed
of ’rules of the thumb’or statistics aboutthe system,andthat it is not complete.If the
systemis reconfigured,large parts of the knowledge
has to
be updated.In the failure tree basedapproaches,this could
be handledby specifyingthe diagnoseknowledge
separately for eachmodulein an assemblycell. In a specific configuration, most of the knowledgewouldthen be collected
fromits components,
andonly a smallpart wouldhaveto be
addeddescribingthe current configuration.However,
specifying all diagnosticknowledge
for each moduleis probably
not feasible,andthus theywill still be incomplete
- i.e. does
not coverall failure situations.
In the modelbasedapproach,the knowledge
stored is often called deepknowledge
since it coversthe normalstructure andfunctionof the system.This approachrequires that
the knowledgeis complete, emphasingthe sameproblems
of uppdatingthe systemas with the shallowtechniques.Althoughthis is an even moremorecomputationallyexpensiveapproach,it has gainedinterest sinceit is better suited
for modulardescriptionthan the diagnosticrules above
(e.g., see [Lee,1986]).
Recovery
Theterm(error) recoveryis usedin a moreversatile fashion thanthe twoabove.Essentially,it is the processof ’correcting an error’, i.e. changethe state of the controlled
systemto be consistentwith specifications. If a module
accomplishes
this withoutfailure (i.e. the systemwhich
uses this module/service
nevernotices any error), the module is said to be fault tolerant. If the module
reportsthe
error to someother part of the systemresponsiblefor taking correctiveactions, the systemas a wholeachieveserror
recovery.
Thefollowingsections reviewssomeof the approaches:
placingthe original(failed) part or as a correctivecontinuation of it, andthe programexecutionis then continuedby
Programming
languageconstructs A first step to structhe interpreterin its currentcontext.Thisapproach
is often
ture the handlingof exceptionalsituations in a programming calledplanrepair - andthe idea is to ’remember’
the correclanguageis to introduce a newprogramming
construct, oftion by altering the plan/program.
ten called an exceptionhandler.Uponan error, the control
Delchambre
et. al. presents a backward
error recovery
is transferred to the properexceptionhandler, whichwill
approach[Delchambre
and Coupetz,1988;Gaspartet. al.,
then executecorrective actions. However,in somelanguag1989].It usesa ’flat’ (nonhierarchical)plan representation
es not eventhis supportexists, andthe constructsof the lanwith framelikestructuresrepresentingparts andtheir feaguage has to be used to trap errors and accomplish
tures, and rules describinggeneral assemblyknowledge.
dispatchersfor correctiveactions or default actionst [Cox,
Theplan describesthe assemblytask and is givenby the
1988; Cox1989].
user. Anexample
of a feature definedfor a part is the ’handAttemptshavebeenmadeto introduce a notion of recovability coefficient’,describinghow’easy’it is for the robot
erypoints(or blocks)in a program,specifyinga legal and
to handlethat part. Anexampleof an assemblyknowledge
consistentstate to return to in caseof errors. This maybe
rule is that if a sub-assembly
is to be pickedup, the system
viewedas a weakerversionof the conceptof transactionsas
shouldfocusthe pickingoperationto the part of the sub-asused in the data base community
[Harderand Reuter, 1983],
semblywith the best handabilitycoefficient. Theresponse
andthere is ongoingworkstudyingthe usability of these
to an error is to disassemble
the faulty part (i.e. onlyerrors
conceptsin the automationarea [Schmidt,1992].
causedby faulty parts are handled)by generatinga sequence
In the data base community,
the notion of SAGAS
or
of actions (a plan) to accomplish
this.
nested SAGAS
[Gareia-Molinaand Salem, 1987; GarciaMeijeret. al. presentsa hierarchicalsystemin whichthe
Molinaet. aL, 1991] has beendevelopedand proposedfor
objectsusedin the (a priori given)planis called ’knowledge
modelling
parallel, nestedactivities in a corporationas a
areas’ (KA’s)[MeijerandHerzberger,1988;Meijeret. al.,
data base application. Examples
of suchactivities are re1991]. EachKAis responsiblefor someaction suchas callceivingorders, billing the customerwhileupdatingthe ining a partially orderedset of other KA’sor performingsome
ventory,andso on. In principle,it is a scheme
for specifying
primitivesensingor acting. For eachKAthere is an invocacompensating
activities to be usedin case of an abortionof
tion specification,specifyingwhatgoalsit will fulfill and/or
an ongoingactivity, and to specifyhowthe abortionof one
whatfacts needto existsin orderto use it. If it is a primitive
activitythat is a part of a nestedstructureof activitiesshould
KA,monitorconditionsmaybe specified, as well as a set of
affect the other activities. Thereare nomeansto describe
exceptionhandlingstrategies. Sincethese strategies are
that somealternative activity shouldbe performedwhenan
themselvesrepresentedas KA’s,they contain invocation
activityaborts.
specificationsguidingthe systemto whatrecoverystrategy
Knowledgebased systems The term knowledge based
to use whenthe monitoringconditionssignal an error.
systems is commonly
used to denote any system wherethe
Ahierarchical, framebased approachis proposedby
knowledge
usedis separatedfromthe programthat uses it.
[ChertandTrivedi,1991], whereframesrepresentplanskelThesesystemare often also called rule basedor framebased
etonsof different abstractionlevels. The’planning’consists
systems,accordingto howthe knowledge
is represented.
of selectingappropriate’frames’and’instantiating’ subIn twoearly proposals([Leeet. al., 1983;Gini, 1983])
plans(frames)refiningthe planuntil all leavesare primitive
conventionalrobot system wasextendedby a "knowledge
actionsor perceptions.In this approach,the majordifferand reasoningmodule".Error recoverywasachievedby usencebetweengeneratingthe original plan for an assembly
ing the failure tree produced
in the diagnoseprocess,andby
task andgeneratingan error recoveryplanis that the overall
goalfor the plan is onlyconsideredin the first case. During
augmenting
the explanationswith corrective actions/proceplanningfor error recovery,the maingoal is to achieveany
dures. These’corrections’weredesignedto restore the controlled system(the application)to either a previouslyvisited
errorfree state.
Themaindifferences in the approachestaken by Meijer
state or a state further downthe original program.In both
these approachesthe original robot programis interrupted
andChenis that in the first case exceptionhandlingstrateandthe recoveryis performedby downloading
newinstrucgies are predefinedfor eachprimitiveaction, albeit as more
tions to the robot.
or less generalplans, whilein Chen’sapproachthese plans
In Noreilset. aL [NoreilsandChatila, 1989;Noreils,
are generateduponan error situation usingavailableactions
1990]proposesa variant of the solutionabove.Herethe corandsubplans,but with a somewhat
different goal state than
rectiveactionis insertedinto the originalprogram,
either reduringthe original planning.
I. Examples
are ’longjump’
in Candstructureduse of methods
in
C++.
Graphbased approachesWhenthe task description is
basedon somegraphformalismsuch as a Petri Net or Finite
97
State Machines,somerestricted variants of the approaches
described above apply. In the following, only Petri Net
basedapproacheswill be presentedsince alternative formalismsare often compilable
into a Petri Net.
Petri Nets(PN)is a static description(’basedplaces
and transitions betweenthem,whereaction normallytake
place duringa transition) withoutany exceptionhandling
constructs as can be foundin programming
languages.Thus,
if error handlingis to be usedin a PNbasedapproach,it
mustbe modelledas a part of the normaloperation,andonce
the PNis constructedit can not be arbitrarily modified.Using PN’s,there are four constructsthat canbe usedto encode exceptionhandling [Zhouand DiCesare,1989]:
Input Condition:Whenseveral transitions leaves a
place, it is customary
to select arbitrarily
betweenthem. However,the transitions maybe
augmented
with a condition,whichif satisfied
will favourthe selectionof that transition, and
otherwisereject that transition.
Alternative Path: Usingthe Input Conditionconstruct
above, an alternative path throughthe PNmay
be defined.
Backward
Error Recovery:The two constructs aboveis
used to trap an anomalyand executecorrective
actions (undoingthe problem),returning to
previouslyvisited place in the PN.
ForwardError Recovery: Analogousto Backward
Error Recovery,
but the correctiveaction will
directly solve the problemandreturn control to
the sameplace as wherethe error originated(or
wasdetected).
Petri Nets with backtracking:In [CaoandSanderson,1992]
a systemis presentedwhichgeneratesa PNcontroller from
an assemblydescription representedas an AND/OR
tree. At
eachplace reachedby a transition wherethe transition/operation mayfail, a forwarderror recoveryaction is defined
whichwill try to correct the failure. If the PNstill fails, a
backtrackingapproachis used basedon the augmentation
of
the PNwith inverse transitions (brother transition in [Cao
and Sanderson, 1992]) allowing the system to backtrack
(disassemblingparts) to a previousstate. In the assembly
context, dependingof the parts disassembled,the system
maychooseto redo the assembleoperation with partially
newmaterialas a strategyto correct the originalerror. This
augmentation
of the PNis doneas a part of the generation
of the PNfrom the AND/OR
graph, and can only handle a
subsetof all faults that mayoccurin an assembly
cell. Also,
whenexpandingthe PNwith newplaces and transitions for
handlinganomalies,the resulting net growslarge and complex.
LayeredPetri Nets (LPN)is used to modularizea
98
controlleras severalPN’sresponsiblefor different functionality or modesof operation.In a LPN
a place maybe defined
to be a completePNin itself, defininga complex
action to
be performedwhenthe token reachesthat place. In [Hasegawaet. al., 1990]LPN’sis usedto define separatenets for
normaloperation (an auto-modenet) for exceptionhandling, manualoperationetc., and howto switchbetween
these modes.This maybe viewedas a moregeneral and
structured versionof the exceptionhandlerconstruct mentioned above,since it also handles’manualmode’and any
other modeof operationdesirable.
ModifiableLayeredPetri Nets: In [Zhouand DiCesare,
1 usingthe four error
1989;ZhouandDiCesare,1993]a LPN
recoverymethodsdescribedabovein cooperationwith an
Error Diagnoseand RecoveryPlanning module(EDRP)
presented. Whenan anomalyappears during ’execution’ of
the LPNwhichhas previouslynot beenplannedfor, the
EDPR
moduleextends the original LPNby transforming
parts of it (using the four constructsdescribedabove)
handlethe situation. This maybe viewedas on line ’patching’ of the code,but the authorsclaimthat all propertiesof
the original net (suchas avoidingdeadlocksor buffer over2.
flows)is preserved
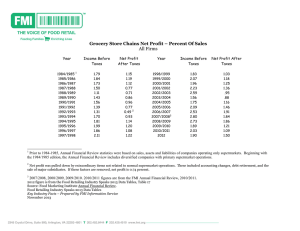
Observations
Table 1: Techniques for recovery after an error
"13qaeof
error
recover
Knowled Is knowlge
source? edgeapplication
dependent
Knowled
gerepresentationt
eehnique
Gini
any
program
Lee
any
us4~r
Not~ils.
Chatila
any
user/system
ycrJno
mles
Delchambre backward
user/system
no
roles.frames
Meijeret.a/.
any
user
?
semofrules
Chcn
any
system
no
plans
Caoet. al.
yea
mles
backward assembly
petrinet
Hasegawa
et. al.
any
user
yes
layered PN
Zhou,
DiC-
any
user/system
yes/no
layered PN,
~ale~
@.sKre
Mostof the techniquespresentedaboveprovideboth back1. Herethe authorsviewstheplaceas aa operationor ongoing
activityanda transitionas aninstantaneouschange
of state
(place).
2. Theoretical
work
supporting
thisis described
in [-Fielding
et. al.,
1988].
ward and forward error recovery. Someof the systems
combinepredefined system information with application
dependent knowledgespecified by the user (Delchambre/
Zhou), someextract it from other available sources such as
the original robot programor assemblydescription(Gini/
Cao). Notable is that very few approachesuses general
error recovery knowledgeonly. Exceptions is approaches
proposed by Delchambreand Chert, witch manageswithout
any application specific error recovery knowledge.In all
other approaches error recovery knowledgeis associated
with each action or each possible error explanation.
Techniquesfor recovery seems to evolve in two directions; techniques based on graph formalismssuch as Petri
Nets, whichhave sometractable properties of provable liveliness etc., and general, plan basedformalisms.In both cases
there are planners involved, which poses a problemsince
1most planners are knownto have problem with soundness
and/or safeness2, and to have intractable complexity(i.e.
they can’t handle large data). However,there are planners
that are safe, and in somedomainseven sound. Andby restricting the semantics of the planning problem,the complexity can be reduced. Promisingworkin this direction can
be found in [Klein, 1993].
Conclusions
In this paper different techniques proposingsolutions to
the error recovery field have been reviewed. Whatthey
share is a completely different view of what to specify and
howto do it comparedwith equipmenttraditionally used in
industry, whichmakesthemhard to integrate into existing
production plants. Although, someattempts have been made
to build industrial applications (e.g. ThornEMI[Ashtonet.
al., 1987], and LookheedAeronautical Systems Company
[Kartak, 1988]), using only the most fundamentaltechniques. As limited as they are, they are still regardedas improvementsto the alternatives given at the time.
As striving towards a moreflexible work cell equipment
yields a more complexinstruction task and a more complex
behaviour, it is essential to find suitable high-level methods
and languagesfor instructing the cell if the flexibility is not
to be lost. Simplyproviding ’hi-level’ languagesused for
programmingcomputers is not enough. The goal must be to
maximizethe expressiveness while minimizingthe specification needed, and thus only leave to the application programmerto specify what is really application dependent
knowledge, knowledgewhich can not be generated from the
design of the product. This in turn implies that different
parts of the system(abstraction levels) is to be specified/instructed by different categories of people, and thus that dif1. Just becausethe plannerdoesnot find a planthere is noguarantee that it doesn’texist one
2. Theplanneris not guaranteed
to halt if a plandoesnot exist
99
ferent languages/forms av descriptions maybe needed - as
opposite to what is suggested in [Cox, 1988].
Concludingfromthis, future research in the area ought to
be heading towards multileyered knowledgebased systems
describing limited domains, systems which is easy to adapt
to a newapplication.
References
[Ashton et. al., 1987] M. Ashton, D. A. Harding and M. I.
Micklefield. A flexible assembly system controller. In
Proceedingsof the 2nd International Conferenceon Machine
Control Systems - MACON-2,
p.165-74, IFS Publications,
Kempston,UK1987.
[Cao and Sanderson,1992]T. Caoand A. C. Sanderson.SensorbasedError Recoveryfor RoboticTaskSequencesUsingFuzzy
Petri Nets. In IEEEInternational Conferenceon Roboticsand
Automation,p.1063-9, 1992.
[Chang and DiCesare, 1989] S.J. Changand E DiCesare. The
generation of diagnostic heuristics for automated error
recoveryin manufacturing
workstations.In IEEEInternational
Conference
on RoboticsandAutomation.p. 522-7vol.1, 1989.
[Chang, 1989] S.J. Chang, E DiCesare and G. Goldbogen.An
algorithm for constructing a failure propagation tree in
manufacturingsystems. In IEEEInternational Symposium
on
Intelligent Control,p.38-43,1989.
[Chang et. al., 1990a] S. J. Chang, G. Goldbogenand E
DiCesare.Evaluationof diagnosabilityof failure knowledge
in
manufacturingsystems. In IEEEInternational Conferenceon
RoboticsandAutomation,p.696-701vol. 1, 1990.
[Chang et. al., 1990b] S. J. Chang, G. Goldbogen and E
DiCesare. Aspects of diagnostic rules for manufacturing
systems: generation, generalization and reduction. In IEEE
International Conferenceon Systems, Manand Cybernetics,
p.78-83, 1990.
[Chert and Trivedi, 1991]C.X.Chelaand M. M.Trivedi. A task
planner for sensor-basedinspection and manipulationrobots.
In Proceedingsof the SPIE- The International Society for
OpticalEngineering,vol. 1571,p. 591-603,1991.
[Cox, 1988] I.J. Cox. C++language support for guaranteed
initialization, safe termination
anderror recoveryin robotics.In
IEEEInternational Conferenceon Robotics and Automation.
p.641-3vol.l, 1988.
[Cox, 1989] I.J. Coxand N.H. Gehani. Exception handling in
robotics. Computer,22(3):43-9, March1989.
[deKleer amdW’llliams, 1987] J. deKleer and B.C. W’dliams.
Diagnosing
MultipleFaults. Artificial Intelligence, 32(1):97130, 1987.
[deKleer and Williams, 1989] J. deKleer and B.C. V~rdliams.
Diagnosis with Behavioural Modes.In Proceedingsof the
1989’thlntenationalJoint Conference
on Artificial Intelligence
(IJCAI89),pp. 1324-1330,1989.
[Delchambreand Coupez,1988] A. Delchambreand D. Coupez.
Knowledge
based error recovery in robotized assembly.In
Proceedings of the 9th International Conference on
Developmentsin AssemblyAutomation - Japan vs Europe;
ProductDesignfor Assembly;AssemblyAutomation.p.349-66.
IFS Publications, Kempston,Bedford,UK,1988.
[Fielding et. aL, 1988] E J. Fielding, E DiCesare and O.
Golbogen. Error Recovery in Automated Manufactoring
through the Augmentation of ProgI’amrned
Processes. In
Journal
ofRobotic
Systems,
5(4),337-362,
1988.
[Meijer and Herzberger, 1988] G. R. Meijer and L. O.
Hertzberger. Off-Line Programming of Exception Handling
Strategies.
In Proceedings of IFAC Symposium on Robot
Control p.431-436, Karlsruhe 1988.
[Frank,
1990]E M. Frank.FaultDiagnosis
in Dynamic
Systems
usingAnalyticaland Knowledge
BasedRedundancy- A
Survey
onsomenewresults.
Automatica,
26(3):459-474,
1990.
[Meijer et. al., 1991] G.R. Meijer, L. O. Hertzberger, T. L. Mai,
E. Ganssens and E Arlabosse. Exception Handling System for
AutonomousRobots Based on PES. In Journal of Robotics and
AutonomousSystems. 7(2-3): 197-209, 1991.
[Garcia-Molina
and Salem,1987]H. Garcia-Molina
and K.
Salem.SAGAS.Proc.SIGMODint.conf.on Management
of
Data,pp.249-259,
May1987.
[Garcia-Molina
et.al.,1991]H.Garcia-Molina,
D. Gawlick,
J.
Klein, K. Kleissner and Kenneth Salem. Coordinating MultiTransaction Activities. Data EngineeringBulletine, 1991.
[Gaspart et. al., 1989] P. Gaspart, A. Delchambre, A. Coupez
and P. Brouillard. Rule based procedures for diagnosis and
error recovery. In Proceedings of MIV-89 . International
Workshopon Industrial Applications of MachineIntelligence
and Vision (Seiken Symposium),p.88-93, 1989.
[Gini, 1983] M. Gini. Recovering from Failures:
A New
Chalengefor Industrial Robotics. In Proceedingsof the 25"th
IEEE Computer Society
International
Conference
(COMPCON-83).
p.220-227, Arlington 1983.
[Harder and Reuter, 1983] T. Harder and A. Reuter. Principles of
Transaction Oriented Database Recovery. ACMComputing
serveys, 15(4):287-317, 1983.
[Hasegawa et. al., 1990] M. Hasegawa, M. Takata, T. Temmyo
and H. Matsuka. Modelling of exception handling in
manufacturing cell control and its application to PLC
programming. In IEEE International Conference on Robotics
and Automation, p.514-19, vol.1, 1990.
[Heyes-Roth, 1990] B. Hayes-Roth. Architectural Foundations
for Real-TmaePerformancein Intelligent Agents. In Journal of
Real-17meSystems, no.2, p.99-125, 1990.
[Iseremann, 1984] R. Isermann. Process Fault Detection based
on Moddeling and Estimation
Methods
A Survey.
Automatica, p.387-404, vol.20, 1984.
[Kartak, 1988] J. A. Kartak. Development of automated
workcell control software: a case study. In Proceedingsof the
18th International Symposiumon Industrial Robots, p.467-91,
1988.
[Klm and Welch, 1989] K.H. Kiln and O. H. Welch. Distributed
Execution of Recovery Blocks: an approach for uniform
treatment of hardware and software faults in real-time
applications. In IEEEtransactions on Computers, 38(5):626636, 1989.
[Klein, 1993] I. Klein. Automatic Synthesis fo Sequential
Control Schemes. PhD-theses no.305, Linktping University,
1993.
[Noreils, 1990] E R. Noreils. Integrating error recovery in a
mobile robot control system. In IEEEInternational Conference
on Robotics and Automation, p.396-401vol. 1, 1990.
[Noreils and Chatila, 1989] E R. Noreils and R. G. Chatila.
Control of mobile robot actions. In IEEE International
Conference on Robotics and Automation. p. 701-7 vol.2, 1989.
[Pazzani, 1986] M.J. Pazzani. Reflnln$ the KnowledgeBase of
a Diagnostic Expert System: AnApplication of Failure Driven
Learning. In 5’th National Conferenceon Artifical Intelligence
(AAA1-86). p.1029-35, 11-15 Aug. 1986.
[PazTarti, 1987] M.J. Pazzani. Failure-Driven Learning of Fault
Diagnosis Hheuristics. IEEE Transactions on Systems, Man
and Cybernetics, SMC-17(3),p.380-394, May/June 1987.
lReiter, 1987] R. Reiter. A Theory of Diagnose from First
Principles. Artificial Intelligence, 32(1):57-95,1987.
[Schmidt, 1992] U. Schmidt. A Frameworkfor Automated Error
Recovery in FMS.In International Conference on Automation,
Robotics and ComputerVision. p. IA.3.4.1-5, 1992.
[Srinivas, 1977] S. Srinivas. Error Recovery in Robot Systems
PhDthesis California Inst. of Tech., Pasadena,1977.
[Srinivas, 1978] S. Srinivas. Error Recovery in Robots Through
Failure ReasoningAnalysis. In Proceedingsof AFIP- National
ComputerConference, p.275-282, 1978.
[Struss and Dressier, 1989] R Struss and O. Dressier. "Physical
Negation" - Integrating Fault Models into the General
Diagnostic Engine. In International Joint Conference on
Artificial Intelligence (IJCAI89), pp. 1318-1324,1989.
[Taylor and Taylor, 1988] G. E. Taylor and P. M. Taylor.
Dynamicerror probability vectors: a framework for sensory
decision making. In IEEE International
Conference on
Robotics and Automation, p. 1096-100, 1988.
[Taylor et. al., 1990] P.M. Taylor, I. Halleron and X.K. Song.
The application of a dynamicerror frameworkto
robotic
assembly. IEEEInternational Conference on Robotics and
Automation, pp170-5, 1990.
[Zhang, 1993] T. Zhang. A Study in Diagnosis Using
Classification and Defaults. PhDthesis no. 302, LinkSping
University, 1993
[Zhou and DiCesare, 1989] M. C. Zhou and F. DiCesare.
Adaptivedesign of Petri net controllers for error recovery in
automated manufacturing systems. IEEE Transactions on
Systems, Manand Cybernetics, 19(5): 963-73, Sept. 1989.
[Laprie, 1992] J. C. Laprie. Basic Concepts and Associated
Terminology. In Dependable Computing and Fault Tolerant
Systems, Vol. 5, Springer-Verlag, WienNew-York,1992.
[Lee et. al., 1983] M. H. Lee, D.P.Bames and N.W. Hardy.
KnowledgeBased Error Recovery in Industrial Robots. In
International Joint Conference on Artificial Intelligence
(IJCAI83). pp.824-26, 1983.
[Zhou and DiCesare, 1993] M.C. Zhou and E DiCesare. Petri
Net Synthesis for Discrete Event Control of Manufactoring
Systems. ISBN0-7923-9289-2, Kluwer AcademicPub., 1993.
[Lee, 1986] M.H. Lee. Deep knowledge modelling in robotics.
In Proceedings of the Alvey IKBS Research Theme: Expert
Systems. Deep Knowledge. Workshop 3Io.2, p.44-50, Alvey
Directorate, London,UK, 1986.
100