From: AAAI Technical Report SS-94-04. Compilation copyright © 1994, AAAI (www.aaai.org). All rights reserved.
Active Rescheduling for Goal Maintenancein
DynamicManufacturing- Systems
ArneF. Claassen, RubyD. Lathon, Daniel M. Rochowiak,
Leslie D. Interrante
Intelligent SystemsLaboratory
University of Alabama
in Huntsville
intert@ebs330.eb.uah.edu
Abstract
organizationbeginsto crumbleas the tasks at hand
begin to pull frommultiplebureaucratic agencies,
The manufacturingplant is viewedas a group of
and the abstract organizational plan meets
interacting subsystems.Theresearch describedin
recalcitrant realities. The constantly changing
this paperis aimedat characterizingthe subsystem workplacecreates demandson the most immediate
interactions such that an intelligent systemcan
bureauto changeits plans, if there is to be hopeof
makeappropriatedecisionsin the face of shopfloor
meetingits goal. Further, the demands
of multiple
contingencies.Thegoal of such decision makingis
bureaucraticagenciesintersect in the workplace,
to insure the meetingof global productiongoals by and the multiple demandswill often, but not
makingreal-time tradeoffs at the level of local
always,require that onebureaucraticagencyinteract
subsystem goals. Manufacturing subsystems
withanother,if either agencyis to achieveits goal
include receiving, shipping, production lines,
(BondandGasser,1988;Durfeeet al., 1989).
maintenance,and material handling. It is assumed
that subsysteminteractions can be captured as B. The Challenge
scheduleinteractions. Activereschedulingis the use
of manufacturing parameters as "cues" for
The constant tension between the a priori
triggering subsystemrescheduling. A distributed
bureaucraticstructure and the a posteriori needto
agent system is described, in which an agent
adapt to newand unforeseencircumstancesleads to
represents a subsystemscheduler. Twoagendasare
a collision of organizational structure and work
employed:onefor the posting of proposedschedule place dynamism
that is especially apparent in the
revisions anda secondagendafor the processingof
manufacturingindustry. Thechallenge is to build
contingencies which must be resolved before
an architecture that represents both the
proposedschedulerevisionscan be accepted.
organization’sstatic structure andthe workplace’s
dynamism.Theorganization’s static structure is
I. Goal Maintenance in a Dynamic
encapsulatedin the agencygivento its bureaucratic
Environment
units. Its units havethe powerto respondto certain
changesthroughprescribed rules used to maintain
A. The Issue
goal states. However, work place events may
requirethat a unit negotiatewith other units in the
The modern world has created numerous
effort to maintainits goal state. In suchcases, the
bureaucraciesto carry out specific local goals that
rules of the agentare not sufficient withinits scope
are believedto contribute to the satisfaction of a
of agencyto handle the situation (Hewitt, 1986;
global goal. Atypical organizationis dividedinto
Star, 1989).
bureausthat are eachchargedwith a particular task.
Wepropose an architecture in whichmultiple
Eachbureau has a specific goal and its actions
agents participate in a hierarchy, havea degreeof
focus on the satisfaction of that goal. Fromthe
autonomyin taking local actions to satisfy local
organization’spoint of view, the satisfaction of
goals, respond to changing conditions, can
eachbureau’sgoal will producethe satisfaction of
negotiatewith other agentsin attemptingto satisfy
the global goal. This authoritarianstructure can be
their local goals, andare subject to the judgments
repeated as manytimes as necessaryto create an
of the agentthat is focusedon the satisfaction of
enterprise where the satisfaction of the most global goals. For our purposes,an agent represents
specific goals will producethe satisfaction of the
the agencyof a unit in an organization.It receives
most global goal. Eachbureausets morespecific
informationandcan vary its operationby reasoning
demandson the bureaus that fall under it by
about the current state and its goal. Further, the
creatingincreasinglyspecific goals.
agent can enter into negotiationwith other agents,
Opposed
to this hierarchicalbureaucraticstrategy if it is unableto maintainits goal state through
is the reality of the workplace. Theworkplace is
local changes commensuratewith its agency. In
constantly changing and placing demandson the
this sense, agents represent organizationalagency
immediate bureaucracy which is attempting to
and not the psychologicalagencyof the human.
satisfy its goal. In the workplace,the bureaucratic
33
Agentsembodyknowledgeand have resources for
communication and negotiation. The latter
characteristic separates themfrom a traditional
knowledge-basedsystem. Each agent has its own
information and knowledge which guides its
actions. Each agent can inform other agents or
request resources. For any particular agent, the
sensors, databases, and actions of other agents
constitute the external world.Theagent’sinternal
world is constituted by the knowledge and
understanding
that it has of its particular task. The
spectrumof organizational modelsof agents in a
systemspans two poles, fromstrictly hierarchical
(agent results reported to a higher level where
authority exists to makedecisions)to planar (agent
results reportedto all other agents; all haveequal
authority). Ourintelligent systemattemptsto avoid
the excesses of these poles. Unlike the focus of
attention in a hierarchical system, agents do take
accountof the rest of the world.Unlikethe focusof
attention in planar systems,agents are constrained
in the actions that they maytake. In brief,
intelligent focusof attention requiresthat agentsbe
awareof their ownresources,goals, andconstraints
in the effort to solve a problemthat potentially
affects the entire collectionof agents(Interrante et
al, 1993a).
C.
Agents and Schedules in Manufacture
Achievement
of the global goals of manufacturing
requires an understandingof interacting schedules
and tradeoffs. Manufacturing
research has produced
manyanalytic techniquesfor generatingindividual
schedules. Typically, however,interactions with
other schedules(with the exceptionof the master
production schedule) are handled by making
assumptionsthat create boundaries.Thescheduleof
interest is thus separated from the schedulesof
other agents andthe dynamism
of the shopfloor.
A scheduler agent views the plant as a closed,
idealized world,in whichcause-and-effectanalysis
across organizational units is ignored. Bounding
assumptions keep the plans and schedules in
relative isolation, and embodyassumptionsabout
the abilities of neighboring subsystems. The
application of rigorous analytical techniques is
normallytightly constrainedby these assumptions
and problemsoccur whenshopfloor events violate
them.
Theconflict of agents is a result of the closedworld assumption that any knowledge not
explicitly representedin the agent nor inferable
from such knowledgeis irrelevant to the agent’s
activity. The closed world assumption can be
mitigatedby providinghigher-orderrepresentations
and reasoningto moderateconflicts amonglowerlevel agents. The closed world is openedto some
34
degree by allowing more heuristic styles of
reasoni-~gto moderateconflicts andviolations of
the boundaries.Suchheuristic techniquesare also
subject to the closed world assumption,but when
combined
with the analytical techniquesin a multiagentsystema "larger" closedworldis created.
II. Negotiating Schedules: An
Architecture
A. Agents
1. Description
The architecture described in this section in
designed to capture manufacturing subsystem
interactions such that appropriatedecisionscan be
madein the face of shop floor contingencies.
Subsysteminteractions are viewedas schedule
interactions for our purposes. Toaid intelligent
rescheduling the rescheduling actions should be
performedin reaction to systemparameters(Smith
et al. 1991)and the schedulingmodelshouldadhere
to the physical modelof the plant (McKay,1993).
Our system includes intelligent,
autonomous
agentsthat negotiateschedulechangesaffecting the
entire system. This design is similar to one
discussedby Burkeand Prosser (1991). In the case
that a proposedschedulechangehas no real "cost"
in termsof inhibiting the goalsof other agents, the
change is implemented with no need for
negotiation. Otherwise,negotiation amongagents
occurs to determine whether a proposedschedule
changeis appropriatein light of its contributionto
the global masterproductionscheduleand its cost
in terms of the effect on related subsystem
capabilities. Unlike bidding schemes, which
attemptto quantifysuchcontributionsand/orcosts,
an overseeing agent employsheuristic schedule
interaction knowledgeto determine whether a
proposedschedule changeshould be implemented.
Informally, such negotiation can be viewedas a
combinationof "taking the easy road" and "doing
the right thing". Eachagent is autonomous
in that
it attempts to protects its beliefs about howits
schedulesshould be organizedand executed. Each
agent represents a manufacturing
system(receiving,
material handling, productionlines, maintenance,
andshipping) and has its ownset of schedulesand
schedulingstrategies for performingthe necessary
rescheduling. In this way, an agent is a selfcontained scheduling unit with the capability of
communicating with the other agents. As in
Zlotkin and Rosenschein
(1991)the negotiation can
result in either one of the agents involvedin the
conflict yielding to the other agent, or a
compromiseof the agent’s goals to promote a
global goal. Unlike Zlotkin and Rosenscheinthis
system utilizes a Superagent to oversee this
stochastic simulation is used as a knowledge
process.
acquisition tool for the schedulingagents, similar
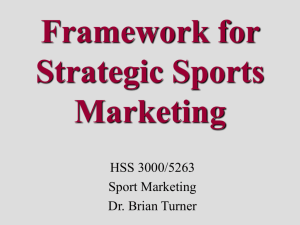
TheSuperagentis similar to the other agents in
to the approachof Nakasukaand Yoshida(1992).
that it contains a schedule and a scheduling
Theschedulingsystemis dividedinto three parts as
strategy, but it is uniquein that its scheduleis the
illustrated below: 1. a Superagent monitoring
masterproductionschedulewhichis preeminentand interactions and analyzing shop floor data, 2. a
embodies the global system goals. It has
committee of subagents that represent the
knowledge
of agent interactions and the ability to
production system and 3. a shop-floor database
adjudicateconflicts among
agents. Adiscrete-event, providing both with necessary state data.
Superagent
ContingencyAgenda
Agenda Controller
(list
of suspended
contingencies
to i~e processed)
(contains knowledge
of muter production
Proposed
Schedule
Agenda
interactions)
(ilsl of suspended
proposed
schedul~s)
¯
4
~
Cue8
nro~r~
edule
Posting
of proposed
schedules
with
contingencies
I
Approval
or
Disapproval
of proposed
schedule
I
Response
to
negotiation
Contingencies
proposed
to
the individual
agents
w
System
Input
Database
(Cues
Floor
Sensors)
Request
for
detailed
data
Detailed
floor
data
Receiving Agent
Shipping Agent
Maintenance Agent
Line 1 Agent
Materials Handling
Agent
¯ ¯ ¯ Line
n Agent
ProductionSystemAgents
~
~(outpuO
Schedule & Strategy changes
Factory floor
(inpu0
Superagent
are entered by a sorting algorithmand pulled fxom
the top of the list one at a time for processing.A
The Superagent "watches" the system and has a
contingency is the result of a newly-proposed
controllingrole in that it triggers reschedulingof
scheduled event; it is a changewhichmust take
the subsystemsand has detailed knowledgeof the
place in a related subsystem(e.g., release of
master productionschedule. It embodiesknowledge committedresource) to accept the proposed new
of the global goals of the productionsystem, the
schedule. A proposedschedule mayhave a number
local goals of the subsystems and how the
of contingencies associated with it. All
subsystemsinterconnect. This knowledge
is used to
contingenciesrelated to a proposedschedulemust
decidewhichlocal goals are moreimportantat any be approved by the affected agent(s) or via
given time to preserve the master production
negotiation before the proposedschedule can be
scheduleif a reschedule
createsa local goalconflict.
implemented.
To manage rescheduling, the Superagent
Negotiation is performedwhena contingency
monitorscue data received fromthe shopfloor to
creates a conflict, whichmaycause a proposed
determineif any of the cue values are critical,
scheduleto be rejected. Robustrepresentation and
indicatinga possibleneedto rescheduleoneor more processingof the contingenciesis vital to improve
subsystems.
When
sucha critical level is identified, the reliability
of the rescheduled system
a messageis sent to the affected subsystemagents. (Drummond,
et al 1993). If a contingencycannot
This messageis a request to reviewthe needfor a
be approvedby the affected agent(s), the Superagent
strategy and/or schedulechangeto return the cue has to use its knowledgebase to resolve the
parameterto an acceptable level. Therequest may scheduling conflict. To preserve the master
cause a revised schedule to be proposedby one or
productiongoals either one of the subsystemswill
more subsystems. If a proposed schedule is in
have to yield its goals or both will have to
conflict with the local goals of related subsystem compromise and change to an intermediate
agents, negotiation is performedwith the help of
schedule.In somecases, neither a single agent or a
two agendas: one for keepingschedules proposed multiple agent compromisecan be reached, in
by the subsystems and one for processing the
whichcase the master productionschedulemust be
contingenciesthat these proposedschedulescreate.
compromised.
Anagendain this context is a queuewhereitems
.
35
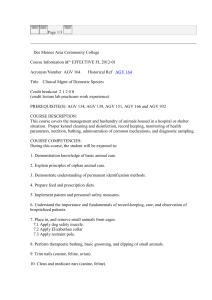
3. Committee of Subagents
Each agent contains a variety of scheduling
strategies and a scheduling mechanism. The
schedulingstrategy determinesthe techniqueusedto
schedule subsystemtasks (may be analytical or
heuristic), while the schedulingmechanism
builds
time-basedevent scheduleaccordingthe strategy.
Theagent strives to maintainits local goals when
altering the schedulealoneor both the scheduleand
the strategy.
AGENT
STRUCTURE
SUPERAGENT
BOUNDING ASSUMPTIONS
Schedule
Clu~e 7
strategy
AND/OR Change ?
4
SCHEDULING
MECHANISM
~ Dc t tiled Shop
Floor
Information
SYSTEM
]
DATABASE
H
SCHEDUHNG
STRATEGY
A
B
C
Propmed
Schedule with
Contingencies[
Oursystem contains agents whichrepresent the
Automated Guided Vehicle (AGV) system,
production lines, receiving, shipping, and
maintenance. For agents that contain multiple
schedulingstrategies to choosefrom,a requestfor a
schedulechangemayinvolvea different strategy, a
different scheduleor a combinationof both, as in
the accompanyingfigure depicting a subsystem
agent. Eachagent maintainsa time-basedschedule
for its manufacturing
subsystem.
The Superagent sends the subsystem agent a
request for reschedule based on cue parameters,
along with the cue values. Theagent then solicits
relevant detailed informationfrom the shopfloor
databaseto determinewhethera schedulechangeis
warranted. The agent determinesif a scheduling
change,a strategy change,or both needto be made.
The choice of scheduling strategy is based on a
comparison
of state conditionswith eachstrategy’s
bounding assumptions, and on knowledgeof the
conditionsunderwhicheach strategy performsbesL
Theappropriate schedulingstrategy is determined
and the scheduling mechanism develops the
scheduleaccordingly.Relatedcontingenciesarise in
two ways: the agent’s knowledgeof howcertain
36
changes in its subsystem propagate to related
subsysi’dmsand notification of an inability to
achieve prior commitmentsto other subsystems
because of the proposedchange(s). The proposed
schedule, along with any contingencies,is sent to
the Superagent,whichwill then acceptor reject the
schedule in the mannerdescribed in the previous
section. If the schedule is accepted, it will be
carried out as planned, otherwise the agent will
revise its schedule and resubmit it to the
Superagent. Ourpast research has focused on the
material handling (AGV) subsystem. The
remainingagents are currently underdevelopment.
The AGV
agent’s structure is comprisedof two
sections: the AGV
strategy selector and the AGV
scheduler. The strategy selector is designed to
dynamically adjust the AGVdispatching and
mutingstrategy in real time suchthat eachstrategy
is used whenit is most effective, resulting in
improvedpart throughputand reducedAGV
arrival
time. The AGVagent’s rule-based reasoning
utilizes output data from a series of empirical
simulationexperiments(Interrante et al, 1993b).
new strategy will be considered whenever a
significant changein a parameterassociated with
AGV
performanceis detected (a cue parameter),
such as a consistently low utilization value. The
AGV
scheduler handles the rescheduling of events
becauseof contingencies imposedby other agents
andminorinefficiencies, such as a productionline
not receivingorderedparts.
Thestrategy selector is a five-level structure
whichis constructedas a decisiontree. Theswategy
selector is triggered wheneverthe Superagent
informs the AGVagent that there is a problem
with a "cue" parameter.Thecue parametersinclude
AGV
utilization, AGV
arrival time, localized line
prioritization, localized order amount(to create
congestion), level of backorders, AGV
breakdown
rate, production line breakdown
rate, and overall
order volume. The AGVagent then retrieves
detailed informationon all of the cue parameters
fromthe systemdatabaseanduses it as input to the
decision tree. The parameters are analyzed and
propagateddownthe tree basedupona set of rules
and information drawn from the simulation
experiments. Oncepropagationis complete, a new
strategy is selected. This newly-cbosenstrategy
will perform best under the current shop floor
conditions.
The AGVscheduler is triggered wheneverthe
AGV
agent receives a request for reschedule or a
contingencyimposedby other agents. The agent
accesses its database and checksthe AGV
schedule
and the availability
of the AGVs.The AGV
agent’s scheduleis reactionary andbased uponthe
orders currentlyplacedfor part delivery.It is only
madefor a short period of time. The schedule
B. Reasoning Processes
of cuesreachescritical levels, the Super’agent
sends
out re~fiests for rescheduling to the affected
subsystems.Thecritical level for each cue depends
on whether it occurs in combinationwith other
critical cue values and is based on knowledge
acquiredfromexperiencedmanufacturers(Interrante
et al, 1993a).Therequest for reschedulingtells
subsystemagentto evaluate its current performance
and determinewhetheritsschedulingstrategy, its
schedule,or both needsto be adjusted.
1. Active Rescheduling
2. Negotiation & Conflict Resolution
contains knowledgeabout the assignmentsof each
AGV.
Withthis information, the agent determines
its ability to carry out the request. It thensendits
response to the Superagent,whichwill be one of
the following:"yes, I can makethe change,""no, I
cannot makethe changedueto lack of a particular
resourceor a scheduleconflict," or "yes, I canmake
the changeff a particular contingency
is met."
Thenew, as yet unaccepted,scheduledevelopedby
Theterm "active rescheduling"is motivatedby the
workof Swain,Bailard, and others (Swain,1991; a subsystemagent is sent to the scheduleagendaof
BaUard,1991)in active vision, whereby"cues" are
the Superagent. Theschedule is accompanied
by a
identified and used to enhanceperformancein the
set of the previously-scheduledevents that were
movedin rescheduling (which mayaffect other
recognition of objects from visual images.
Reschedulingis a non-value-addingactivity and agents). Suchchangesmaybe the result of the need
shouldbe minimized.Yetthe reschcdulingfunction for a resource for an alternate purposethat its
original intent. Theseevents are the contingencies
is essential because of the dynamics of
manufacturingsystems. Weemploymanufacturing that are mutedto the contingency agenda. Each
contingencyis stampeduponreceipt to identify the
parameters as cues to trigger a reschedule for
time of receipt and the schedulewith whichit is
particular subsystems.This approachsimplifies
the process of deciding whichsubsystemneeds to
associated. Theagendaprocessingmechanism
sorts
contingenciesby their id stamp,temporallocation
be rescheduled based on current shop floor
conditions. Onceit is determinedthat a reschedule and priority of the contingency.Contingenciesare
is required,the actual reschedulingprocessinvolves removedfromthe stack one at the time, starting
with the top-most contingencyat the time of the
manymoremanufacturingparameters.
Tochoosethe right time for changinga schedule, next processingcycle (i.e. everytime a contingency
is finished processing,the current top-mostitem is
the Superagent continuously monitors the cue
parameters(Interrante et al., 1993a),an indication removedfrom the agenda)and processed. Theflow
of which subsystems are in danger of running
of information in the agenda system of the
is
depicted
below:
behindtheir schedule. Whenone or a combination Superagent
Schedule
fromLine 1
to AGVagent
1
scheduleproposal
AGV
contingency
from
from
from Line 8
1 contingency
AGV
AGV
contingency
Line 8
0
0
0
0
0
0
to Line 6 agent
_---to Maintenance
agent
agerlL
toReceiving
~ AGVagent
to Line2
8 contingency
contingency
8 contingency
to Receivingagent,~
to ShippingAgent
lab.._
O
The processing of a contingencyis performedby
proposingthe changeto the affected sub-systems.If
the change is not acceptable to one or more
subsystem agents, the Superagent proceeds by
beginning negotiation. It employsknowledgeof
37
the goals of each sub-system and the cost of
proposedchangesin light of the affected goals.
Usingthis informationthe conflict is resolved by
either forcing oneof the systemsto accept the new
eventandaccordinglyadjust the rest of its schedule
(forfeiting its goal for the goodof the moreglobal
"Intelligent
Control of AGVs:Dynamic
goal), forcing all involved systemsto reschedule
Sc’fi-eduling via Selective Attention".
the event in compromise,or relaxing the master
Proceedings of the 1993 NSF Design and
production schedule. Onceall contingenciesof a
Manufacturing Systems Conference, Volume
particular schedulehavebeenresolved,the schedule
2, 1993.
agendais given permissionto resumethe suspended Intermnte, Leslie D., Daniel M. Rochowiak,and
scheduleand return it to the senderagent as the
Ben Sumeral. "Scheduling of Automated
approvedschedule.
Guided Vehicles for Material Handling:
DynamicShop Floor Feedback". To appear in
III. Conclusion
ComputerControl of ManufacturingSystems.
1993.
Muchresearch remains, including the development Law, Averil M. and W.David Kelton. Simulation
of additional subsystemagents, the controlling of
Modeling & Analysis. NewYork, McGrawpropagationof contingenciesand schedulechanges
Hill, 1991.
and the handling of contingency and schedule
McKay,KennethN., "The Factory from Hell - A
satisfaction in time. Boththe scheduleagendaand
ModelingBenchmark",Intelligent, Dynamic
the contingency agenda must be dynamically
Scheduling for Manufacturing Systems
updatedto reflect the fact that the processingof an
Workshop,1993.
agendaitem will alter the validity of someof the
Nakasuka, Shiniehi and Taketoshi Yoshida,
remainingitems.
"Dynamic
scheduling system utilizing machine
Wehave described an architecture which is
learning as a knowledgeacquisition tool",
intended to model subsystem interactions in
International Journalof ProductionResearch,
manufacturingsuch that shop floor contingencies
Vol. 30, No. 2, 1992.
can be appropriately handled by an intelligent
Romero,Iv(m S. and Nilda R. Romero."Chrysler
schedulingsystem.Ourapproachaddressesthe need
Acustar Simulation Model Development"
to balancethe a priori bureaucraticstructure andthe
Technical report, University of Alabamain
a posteriori need to adapt to newand unforeseen
Huntsville, Intelligent SystemsLaboratory,
circumstancesin manufacturing.
1993.
Smith, Stephen F., MarkS. Fox and Peng Si Ow,
References
"Constructing and Maintaining Detailed
AutoSimulations, Inc. AutoModUser’s Manual
ProductionPlans", A/Magazine,Fall 1986.
and Lesson’s Manual.
Star, S. L. "The structure of ill-structured
Ballard, D. "Animate Vision," Artificial
solutions: boundaryobjects and heterogeneous
Intelligence, Vol48, 57-86, 1991.
distributed problemsolving." In Gasser,L and
BondandGasser,DistributedArtificial Intelligence.
Huhns, M. (eds) Distributed artificial
MorganKaufman,1988.
intelligence Vol 2, London:Pitman, 37-53,
Burke, P. and P. Prosser, "A distributed
1989.
asynchronous
systemfor predictive andreactive Swain, M. Proceedingsof the NSFActive Vision
scheduling", Artificial Intelligence in
Workshop,Chicago, IL, August, 1991.
Engineering,Vol. 6, No.3, 1991.
Wemer,E. "Cooperatingagents: A unified theory
Drummond,
Mark, John Bresina, Keith Swanson,
of communication and social structure."
"Contingent Scheduling: Opportunities and
Research notes in Artificial Intelligence,
Issues", Intelligent, Dynamic
Schedulingfor
Distributed Artificial Intelligence, Morgan
ManufacturingSystems Workshop,1993.
Kaufman,1989.
Durfee, E., Lesser, V. and Corkill, D. "Trendsin
Wilson, Carlton M., ThomJ. Hodgson, and
cooperativedistributed problemsolving," IEEE
Russell E. King, "A Note on Incorporation of
Transactions on Knowledge and Data
Improved Information in the Control of
EngineeringI, 63-83, 1989.
Multiple Vehicle AGVSystems". NCSU
Egbelu, Pius J., and Jose" M. A. Tanchoco.
TechnicalReport#90-14,North CarolinaState
"Characterizationof AutomaticGuidedVehicle
University, 1991.
Dispatching Rules". International Journal Zlotkin, Gilad and Jeffrey S. Rosenschein,
Production Research, Volume22, Number3,
"Cooperation and Conflict Resolution via
359-374,1984.
Negotiation AmongAutonomousAgents in
Hewitt, C. "Offices are open systems." A CM
NoncooperativeDomains",IEEETransactions
Transactionson Office Information Systems,
on Systems, Man,and Cybernetics, Vol. 21,
Vol 4, No3, 271-287,1986.
No. 6, November/December
1991.
Interrante, Leslie D. Daniel M. Rochowiak,John
S. Rogers, and Lysle E. Shields III.
38