Ancestral Sampling for Particle Gibbs
advertisement

Ancestral Sampling for Particle Gibbs
Fredrik Lindsten? , Michael I. Jordan?? ,
Thomas B. Schön?
? Division
of Automatic Control
Linköping University, Sweden
?? Departments
of EECS and Statistics,
University of California, Berkeley, USA
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
This talk
Two things:
• Improve the mixing of particle Gibbs by “ancestor sampling”.
• Application to non-Markovian models.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Problem formulation
• High-dimensional target γ̄T (x1:T , θ ) on XT × Θ.
• Sample from γ̄T (x1:T , θ ) using MCMC.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Problem formulation
• High-dimensional target γ̄T (x1:T , θ ) on XT × Θ.
• Sample from γ̄T (x1:T , θ ) using MCMC.
ex) State-space model,
γ̄T (x1:T , θ ) = p(x1:T , θ | y1:T ).
Ideal Gibbs sampler,
0
1. Draw x1:T
∼ p(x1:T | θ, y1:T );
2. Draw θ 0 ∼ p(θ | x1:T , y1:T ).
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Particle MCMC
Particle Markov chain Monte Carlo (PMCMC),
• Use sequential Monte Carlo (SMC) to sample from γ̄T (x1:T ).
• Particle independent Metropolis-Hastings (PIMH)
• Particle Gibbs (PG)
N.B. Sampling θ straightforward. We drop θ to simplify notation!
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Particle MCMC
Particle Markov chain Monte Carlo (PMCMC),
• Use sequential Monte Carlo (SMC) to sample from γ̄T (x1:T ).
• Particle independent Metropolis-Hastings (PIMH)
• Particle Gibbs (PG)
N.B. Sampling θ straightforward. We drop θ to simplify notation!
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Particle MCMC
Particle Markov chain Monte Carlo (PMCMC),
• Use sequential Monte Carlo (SMC) to sample from γ̄T (x1:T ).
• Particle independent Metropolis-Hastings (PIMH)
• Particle Gibbs (PG)
Sequential Monte Carlo,
• Sequence of target densities, for t = 1, . . . , T,
γ̄t (x1:t ) =
γt (x1:t )
.
Zt
• Approximated by collections of weighted particles.
N.B. Sampling θ straightforward. We drop θ to simplify notation!
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Sequential Monte Carlo – the particle filter
Weighting
Selection
Mutation
Selection
Weighting
m
N
m
N
• Selection: {xm
1:t−1 , wt−1 }m=1 → {x̃1:t−1 , 1/N }m=1 .
m
m
m
m
• Mutation: xm
t ∼ Rt (dxt | x̃1:t−1 ) and x1:t = {x̃1:t−1 , xt }.
m
• Weighting: wm
t = Wt (x1:t ).
m N
⇒ { xm
1:t , wt }m=1
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Sequential Monte Carlo – the particle filter
Selection
Weighting
Mutation
Weighting
Selection
• Selection + Mutation:
m
(am
t , xt )
∼ Mt (at , xt ) =
t
wat−
1
∑l wlt−1
Rt (xt | xa1:tt −1 ).
m
• Weighting: wm
t = Wt (x1:t ).
m N
⇒ { xm
1:t , wt }m=1
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Path degeneracy
1
0.5
0
−0.5
State
−1
−1.5
−2
−2.5
−3
−3.5
−4
5
10
15
20
25
Time
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Path degeneracy
1
0.5
0
−0.5
State
−1
−1.5
−2
−2.5
−3
−3.5
−4
5
10
15
20
25
Time
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Sampling based on SMC
1
• With
0
P(x1:T
=
xm
1:T )
∝
wm
T
0.5
we get,
0
−0.5
approx.
∼ γ̄T (x1:T ).
State
−1
0
x1:T
−1.5
−2
−2.5
−3
−3.5
−4
5
10
15
20
Time
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
25
Sampling based on SMC
1
• With
0
P(x1:T
=
xm
1:T )
∝
wm
T
0.5
we get,
0
−0.5
approx.
∼
γ̄T (x1:T ).
State
−1
0
x1:T
−1.5
−2
−2.5
• Approximation can be arbitrarily bad
(for small N)!
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
−3
−3.5
−4
5
10
15
20
Time
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
25
Sampling based on SMC
1
• With
0
P(x1:T
=
xm
1:T )
∝
wm
T
0.5
we get,
0
−0.5
approx.
∼
γ̄T (x1:T ).
State
−1
0
x1:T
−1.5
−2
−2.5
• Approximation can be arbitrarily bad
(for small N)!
• Compensate for approximation:
−3
−3.5
−4
5
10
15
20
Time
SMC within MCMC = PMCMC.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
25
Extended target distribution
SMC generates a sample on XNT × {1, . . . , N }N (T−1) with density,
N
ψ(x1:T , a2:T ) ,
∏
m=1
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
T
R1 (xm
1 )∏
N
∏ Mt (amt , xmt ).
t=2 m=1
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Extended target distribution
SMC generates a sample on XNT × {1, . . . , N }N (T−1) with density,
N
ψ(x1:T , a2:T ) ,
∏
m=1
T
R1 (xm
1 )∏
N
∏ Mt (amt , xmt ).
t=2 m=1
b
b
b
1:T
Introduce extended target. Let xk1:T = x1:T
= {x11 , . . . , xTT }.
−b1:T −b2:T
1:T
1:T
, b1:T )φ(x1:T
, a2:T | xb1:T
, b1:T )
φ(x1:T , a2:T , k) = φ(xb1:T
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Extended target distribution
SMC generates a sample on XNT × {1, . . . , N }N (T−1) with density,
T
N
ψ(x1:T , a2:T ) ,
∏
m=1
R1 (xm
1 )∏
N
∏ Mt (amt , xmt ).
t=2 m=1
b
b
b
1:T
Introduce extended target. Let xk1:T = x1:T
= {x11 , . . . , xTT }.
−b1:T −b2:T
1:T
1:T
, b1:T )φ(x1:T
, a2:T | xb1:T
, b1:T )
φ(x1:T , a2:T , k) = φ(xb1:T
,
1:T
γ̄T (xb1:T
)
T
N
|
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
{z
marginal
N
∏
m=1
m6=b1
}|
T
R1 (xm
1 )∏
N
∏
m
Mt (am
t , xt ) .
t=2 m=1
m6=bt
{z
conditional
}
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Particle Gibbs
Particle Gibbs
?,−b1:T ?,−b2:T
−b1:T −b2:T
1:T
• Draw x1:T
, a2:T
∼ φ(x1:T
, a2:T | xb1:T
, b1:T ).
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Particle Gibbs
Particle Gibbs
?,−b1:T ?,−b2:T
−b1:T −b2:T
1:T
• Draw x1:T
, a2:T
∼ φ(x1:T
, a2:T | xb1:T
, b1:T ).
?,−b1:T ?,−b2:T b1:T b2:T
• Draw k? ∼ φ(k | x1:T
, a2:T , x1:T , a2:T ).
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Particle Gibbs
Particle Gibbs
?,−b1:T ?,−b2:T
−b1:T −b2:T
1:T
• Draw x1:T
, a2:T
∼ φ(x1:T
, a2:T | xb1:T
, b1:T ).
?,−b1:T ?,−b2:T b1:T b2:T
• Draw k? ∼ φ(k | x1:T
, a2:T , x1:T , a2:T ).
More precisely. . .
?,−b1:T ?,−b2:T
• Draw x1:T
, a2:T
by running conditional SMC (CSMC).
?
?
• Draw k with P(k = m) ∝ wm
T.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
ex) Particle Gibbs
Stochastic volatility model,
xt+1 = 0.9xt + wt ,
1
xt ,
yt = et exp
2
wt ∼ N (0, θ ),
et ∼ N (0, 1).
PG, T = 100
N=1000
1
ACF
0.8
0.6
0.4
0.2
0
0
50
100
Lag
150
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
200
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
ex) Particle Gibbs
Stochastic volatility model,
xt+1 = 0.9xt + wt ,
1
xt ,
yt = et exp
2
wt ∼ N (0, θ ),
et ∼ N (0, 1).
PG, T = 100
N=100
N=1000
1
ACF
0.8
0.6
0.4
0.2
0
0
50
100
Lag
150
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
200
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
ex) Particle Gibbs
Stochastic volatility model,
xt+1 = 0.9xt + wt ,
1
xt ,
yt = et exp
2
wt ∼ N (0, θ ),
et ∼ N (0, 1).
PG, T = 100
N=5
N=20
N=100
N=1000
1
ACF
0.8
0.6
0.4
0.2
0
0
50
100
Lag
150
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
200
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
ex) Particle Gibbs
Stochastic volatility model,
xt+1 = 0.9xt + wt ,
1
xt ,
yt = et exp
2
wt ∼ N (0, θ ),
et ∼ N (0, 1).
PG, T = 100
PG, T = 1000
N=5
N=20
N=100
N=1000
1
0.6
0.4
0.2
0.6
0.4
0.2
0
0
N=5
N=20
N=100
N=1000
0.8
ACF
ACF
0.8
1
0
50
100
Lag
150
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
200
0
50
100
Lag
150
200
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
ex cont’d) Particle Gibbs
3
2
State
1
0
−1
−2
−3
5
10
15
20
5
10
15
20
25
Time
30
35
40
45
50
3
2
State
1
0
−1
−2
−3
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
25
Time
30
35
40
45
50
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Poor mixing of PG – interpretation
Particle Gibbs
?,−b1:T ?,−b2:T
−b1:T −b2:T
1:T
• Draw x1:T
, a2:T
∼ φ(x1:T
, a2:T | xb1:T
, b1:T ).
?,−b1:T ?,−b2:T b1:T b2:T
• Draw k? ∼ φ(k | x1:T
, a2:T , x1:T , a2:T ).
b
1:T
, b1:T−1 } are never sampled!
The variables {x1:T
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Poor mixing of PG – interpretation
Particle Gibbs
?,−b1:T ?,−b2:T
−b1:T −b2:T
1:T
• Draw x1:T
, a2:T
∼ φ(x1:T
, a2:T | xb1:T
, b1:T ).
?,−b1:T ?,−b2:T b1:T b2:T
• Draw k? ∼ φ(k | x1:T
, a2:T , x1:T , a2:T ).
b
1:T
, b1:T−1 } are never sampled!
The variables {x1:T
Include b1:T−1 in the Gibbs sweep!
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
PG-AS
Particle Gibbs with ancestor sampling (PG-AS)
• For t = 1, . . . , T, draw
xt?,−bt , at?,−bt ∼ one iteration of CSMC,
?,−b1:t−1 ?
1:T
(at?,bt =) bt?−1 ∼ φ(bt−1 | x1:t
, a2:t−1 , xb1:T
, bt:T ).
−1
• Draw (k? =) bT? with P(bT? = m) ∝ wm
T.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
PG-AS
Particle Gibbs with ancestor sampling (PG-AS)
• For t = 1, . . . , T, draw
xt?,−bt , at?,−bt ∼ one iteration of CSMC,
?,−b1:t−1 ?
1:T
(at?,bt =) bt?−1 ∼ φ(bt−1 | x1:t
, a2:t−1 , xb1:T
, bt:T ).
−1
• Draw (k? =) bT? with P(bT? = m) ∝ wm
T.
We can show,
b
bt
t+1:T
φ(bt | x1:t , a2:t , xt+
1:T , bt+1:T ) ∝ wt
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
γT (xk1:T )
γt (xb1:tt )
.
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
CSMC with ancestor sampling
0 ,b }
CSMC with ancestor sampling, conditioned on {x1:T
1:T
1. Initialize (t = 1):
b1
0
(a) Draw xm
1 ∼ R1 (x1 ) for m 6 = b1 and set x1 = x1 .
m
m
(b) Set w1 = W1 (x1 ) for m = 1, . . . , N.
2. for t = 2, . . . , T:
bt
m
0
(a) Draw (am
t , xt ) ∼ Mt (at , xt ) for m 6 = bt and set xt = xt .
bt
(b) Draw at with
P(abt t = m) ∝ wm
t−1
0
γT ({xm
1:t−1 , xt:T })
.
m
γt (x1:t−1 )
am
m
m
m
t
(c) Set xm
1:t = {x1:t−1 , xt } and wt = Wt (x1:t ) for m = 1, . . . , N .
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
ex cont’d) PG-AS
3
2
State
1
0
−1
−2
−3
5
10
15
20
5
10
15
20
25
Time
30
35
40
45
50
3
2
State
1
0
−1
−2
−3
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
25
Time
30
35
40
45
50
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
PG vs. PG-AS
3
2
State
1
0
−1
−2
−3
5
10
15
20
25
Time
30
35
40
45
PG-AS
3
3
2
2
1
1
State
State
PG
50
0
−1
0
−1
−2
−2
−3
−3
5
10
15
20
25
Time
30
35
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
40
45
50
5
10
15
20
25
Time
30
35
40
45
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
50
ex cont’d) PG-AS
Stochastic volatility model,
xt+1 = 0.9xt + wt ,
1
xt ,
yt = et exp
2
wt ∼ N (0, θ ),
et ∼ N (0, 1).
PG-AS, T = 100
PG-AS, T = 1000
N=5
N=20
N=100
N=1000
1
0.6
0.4
0.2
0.6
0.4
0.2
0
0
N=5
N=20
N=100
N=1000
0.8
ACF
ACF
0.8
1
0
50
100
Lag
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
150
200
0
50
100
Lag
150
200
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Related method: PG-BS
Sampling b1:T−1 suggested by Whiteley (2010),
N. Whiteley, “Discussion on Particle Markov chain Monte Carlo methods”,
Journal of the Royal Statistical Society: Series B, 72(3):306–307, 2010.
Particle Gibbs with backward simulation (PG-BS),
?,−b1:T ?,−b2:T
• Draw x1:T
, a2:T
by running conditional SMC.
?
• Draw b1:T by running a backward simulator.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
ex cont’d) PG-BS and PG-AS
PG-AS, T = 100
PG-AS, T = 1000
N=5
N=20
N=100
N=1000
1
0.6
0.4
0.2
0.6
0.4
0.2
0
0
N=5
N=20
N=100
N=1000
0.8
ACF
ACF
0.8
1
0
50
100
Lag
150
200
0
50
PG-BS, T = 100
N=5
N=20
N=100
N=1000
1
150
200
0.6
0.4
0.2
N=5
N=20
N=100
N=1000
1
0.8
ACF
ACF
0.8
0.6
0.4
0.2
0
0
100
Lag
PG-BS, T = 1000
0
50
100
Lag
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
150
200
0
50
100
Lag
150
200
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Non-Markovian models
Main motivation for PG-AS instead of PG-BS
– appears to be more robust to weight approximation.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Non-Markovian models
Main motivation for PG-AS instead of PG-BS
– appears to be more robust to weight approximation.
Consider a non-Markovian model,
xt+1 ∼ f (xt+1 | x1:t ),
yt ∼ g(yt | x1:t ).
Backward weights depend on,
T
γT (x1:T )
p(x1:T , y1:T )
=
= ∏ g(ys | x1:s )f (xs | x1:s−1 ).
γt (x1:t )
p(x1:t , y1:t )
s=t+1
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Non-Markovian models
Main motivation for PG-AS instead of PG-BS
– appears to be more robust to weight approximation.
Consider a non-Markovian model,
xt+1 ∼ f (xt+1 | x1:t ),
yt ∼ g(yt | x1:t ).
Backward weights depend on,
p
γT (x1:T )
p(x1:T , y1:T )
∝
g(ys | x1:s )f (xs | x1:s−1 ).
=
γt (x1:t )
p(x1:t , y1:t ) ∼ s=∏
t+1
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Rao-Blackwellized smoothing
Rao-Blackwellization,
xt+1 = Axt + vt ,
vt ∼ N (0, Q),
yt = Cxt + et ,
et ∼ N (0, R).
• Marginalize 3 out of 4 states with conditional Kalman filters.
• Marginal model is non-Markovian!
• Apply PG-AS and PG-BS 1D marginal space with N = 5.
−1
10
PG w. ancestral sampling
PG w. backward simulation
−2
10
1000
2000
3000
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
4000
5000
6000
7000
8000
9000
10000
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
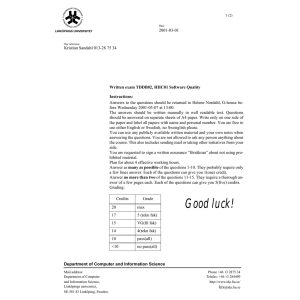
Target tracking
• Coordinated turn motion model with rank deficient process
noise covariance.
• Noisy range-bearing measurements.
• Unknown turn rate θ .
• PG-AS with N = 5 and PMMH with N = 5000.
8000
θ
7000
520
6000
5000
500
4000
3000
2000
480
1000
460
480
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
500
0
0
0.5
1
1.5
2
2.5
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Conclusions
•
•
•
•
PG-AS: A novel approach to PMCMC.
No explicit backward pass (contrary to PG-BS).
Easier to implement and more memory efficient than PG-BS.
Appears to be more robust to weight approximations.
Needs further investigation!
F. Lindsten, M. I. Jordan and T. B. Schön, “Ancestral Sampling for Particle
Gibbs”, Accepted to the 2012 Conference on Neural Information Processing
Systems (NIPS), Lake Tahoe, NV, USA, 2012.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET
Degenerate models
Degenerate state-space models,
xt+1 = Axt + vt ,
vt ∼ N (0, Q),
yt = Cxt + et ,
et ∼ N (0, R).
d=5
• rank(Q) = 1 ⇒
degenerate model!
−1
10
• Rewrite as non-degenerate
non-Markovian 1D model.
−2
10
• Apply PG-AS and PG-BS
1D marginal space with
N = 5.
Fredrik Lindsten, Michael I. Jordan, Thomas B. Schön
Ancestral Sampling for Particle Gibbs
−3
10
p=1
p=5
p = 10
Adapt. (5.9)
AUTOMATIC CONTROL
REGLERTEKNIK
LINKÖPINGS UNIVERSITET