Exploiting Procedural Domain Control Knowledge in State-of-the-Art Planners Jorge A. Baier
advertisement

Exploiting Procedural Domain Control Knowledge in State-of-the-Art Planners
Jorge A. Baier
Christian Fritz
Sheila A. McIlraith
Department of Computer Science, University of Toronto,
Toronto, ON M5S 3G4, CANADA
{jabaier,fritz,sheila}@cs.toronto.edu
reduces the search space but still requires a planner to backtrack to find a valid plan, it should prove beneficial to exploit
better search techniques. In this paper we explore ways in
which SOA planning techniques and existing SOA planners
can be used in conjunction with DCK, with particular focus
on procedural DCK.
As a simple example of DCK, consider the trucks domain of the 5th International Planning Competition, where
the goal is to deliver packages between certain locations using a limited capacity truck. When a package reaches its
destination it must be delivered to the customer. We can
write simple and natural procedural DCK that significantly
improves the efficiency of plan generation for instance: Repeat the following until all packages have been delivered:
Unload everything from the truck, and, if there is any package in the current location whose destination is the current
location, deliver it. After that, if any of the local packages
have destinations elsewhere, load them on the truck while
there is space. Drive to the destination of any of the loaded
packages. If there are no packages loaded on the truck, but
there remain packages at locations other than their destinations, drive to one of these locations.
Procedural DCK (as used in HTN (Nau et al. 1999) or
Golog (Levesque et al. 1997)) is action-centric. It is much
like a programming language, and often times like a plan
skeleton or template. It can (conditionally) constrain the order in which domain actions should appear in a plan. In order to exploit it for planning, we require a procedural DCK
specification language. To this end, we propose a language
based on G OLOG that includes typical programming languages constructs such as conditionals and iteration as well
as nondeterministic choice of actions in places where control
is not germane. We argue that these action-centric constructs
provide a natural language for specifying DCK for planning.
We contrast them with DCK specifications based on linear
temporal logic (LTL) which are state-centric and though still
of tremendous value, arguably provide a less natural way to
specify DCK. We specify the syntax for our language as well
as a PDDL-based semantics following Fox & Long (2003).
With a well-defined procedural DCK language in hand,
we examine how to use SOA planning techniques together
with DCK. Of course, most SOA planners are unable to
exploit DCK. As such, we present an algorithm that translates a PDDL2.1-specified ADL planning instance and as-
Abstract
Domain control knowledge (DCK) has proven effective in
improving the efficiency of plan generation by reducing the
search space for a plan. Procedural DCK is a compelling
type of DCK that supports a natural specification of the skeleton of a plan. Unfortunately, most state-of-the-art planners do
not have the machinery necessary to exploit procedural DCK.
To resolve this deficiency, we propose to compile procedural
DCK directly into PDDL2.1, thus enabling any PDDL2.1compatible planner to exploit it. The contribution of this paper is threefold. First, we propose a PDDL-based semantics for an Algol-like, procedural language that can be used
to specify DCK in planning. Second, we provide a polynomial algorithm that translates an ADL planning instance and
a DCK program, into an equivalent, program-free PDDL2.1
instance whose plans are only those that adhere to the program. Third, we argue that the resulting planning instance
is well-suited to being solved by domain-independent heuristic planners. To this end, we propose three approaches to
computing domain-independent heuristics for our translated
instances, sometimes leveraging properties of our translation
to guide search. In our experiments on familiar PDDL planning benchmarks we show that the proposed compilation of
procedural DCK can significantly speed up the performance
of a heuristic search planner. Our translators are implemented
and available on the web.
Introduction
Domain control knowledge (DCK) imposes domain-specific
constraints on the definition of a valid plan. As such, it can
be used to impose restrictions on the course of action that
achieves the goal. While DCK sometimes reflects a user’s
desire to achieve the goal a particular way, it is most often
constructed to aid in plan generation by reducing the plan
search space. Moreover, if well-crafted, DCK can eliminate those parts of the search space that necessitate backtracking. In such cases, DCK together with blind search
can yield valid plans significantly faster than state-of-theart (SOA) planners that do not exploit DCK. Indeed most
planners that exploit DCK, such as TLP LAN (Bacchus &
Kabanza 1998) or TALP LANNER (Kvarnström & Doherty
2000), do little more than blind depth-first search with cycle
checking in a DCK-pruned search space. Since most DCK
c 2007, Association for the Advancement of Artificial
Copyright Intelligence (www.aaai.org). All rights reserved.
26
Planning problems are tuples (Init , Goal , Objs P , τP ),
where Init is the initial state, Goal is a sentence with quantifiers for the goal, and Objs P and τP are defined analogously as for domains.
Semantics: Fox & Long (2003) have given a formal semantics for PDDL 2.1. In particular, they define when a sentence is true in a state and what state trace is the result of
performing a set of timed actions. A state trace intuitively
corresponds to an execution trace, and the sets of timed actions are ultimately used to refer to plans. In the ADL subset of PDDL2.1, since there are no concurrent or durative
actions, time does not play any role. Hence, state traces reduce to sequences of states and sets of timed actions reduce
to sequences of actions.
Building on Fox and Long’s semantics, we assume that
|= is defined such that s |= ϕ holds when sentence ϕ is
true in state s. Moreover, for a planning instance I, we assume there exists a relation Succ such that Succ(s, a, s ) iff
s results from performing an executable action a in s. Finally, a sequence of actions a1 · · · an is a plan for I if there
exists a sequence of states s0 · · · sn such that s0 = Init,
Succ(si , ai+1 , si+1 ) for i ∈ {0, . . . , n−1}, and sn |= Goal .
sociated procedural DCK into an equivalent, program-free
PDDL2.1 instance whose plans provably adhere to the DCK.
Any PDDL2.1-compliant planner can take such a planning
instance as input to their planner, generating a plan that adheres to the DCK.
Since they were not designed for this purpose, existing
SOA planners may not exploit techniques that optimally
leverage the DCK embedded in the planning instance. As
such, we investigate how SOA planning techniques, rather
than planners, can be used in conjunction with our compiled
DCK planning instances. In particular, we propose domainindependent search heuristics for planning with our newlygenerated planning instances. We examine three different
approaches to generating heuristics, and evaluate them on
three domains of the 5th International Planning Competition. Our results show that procedural DCK improves the
performance of SOA planners, and that our heuristics are
sometimes key to achieving good performance.
Background
A Subset of PDDL 2.1
A planning instance is a pair I = (D, P ), where D is a
domain definition and P is a problem. To simplify notation,
we assume that D and P are described in an ADL subset of
PDDL. The difference between this ADL subset and PDDL
2.1 is that no concurrent or durative actions are allowed.
Following convention, domains are tuples of finite sets
(PF , Ops, Objs D , T, τD ), where PF defines domain predicates and functions, Ops defines operators, Objs D contains
domain objects, T is a set of types, and τD ⊆ Objs D × T is
a type relation associating objects to types. An operator (or
action schema) is also a tuple O(x), t, Prec(x), Eff (x),
where O(x) is the unique operator name and x =
(x1 , . . . , xn ) is a vector of variables. Furthermore, t =
(t1 , . . . , tn ) is a vector of types. Each variable xi ranges
over objects associated with type ti . Moreover, Prec(x) is
a boolean formula with quantifiers (BQF) that specifies the
operator’s preconditions. BFQs are defined inductively as
follows. Atomic BFQs are either of the form t1 = t2 or
R(t1 , . . . , tn ), where ti (i ∈ {1, . . . , n}) is a term (i.e. either a variable, a function literal, or an object), and R is a
predicate symbol. If ϕ is a BFQ, then so is Qx-t ϕ, for a
variable x, a type symbol t, and Q ∈ {∃, ∀}. BFQs are also
formed by applying standard boolean operators over other
BFQs. Finally Eff (x) is a list of conditional effects, each of
which can be in one of the following forms:
∀y1 -t1 · · · ∀yn -tn . ϕ(
x, y ) ⇒ R(
x, y ),
x, y ) ⇒ ¬R(
x, y ),
∀y1 -t1 · · · ∀yn -tn . ϕ(
x, y ) ⇒ f (
x, y ) = obj,
∀y1 -t1 · · · ∀yn -tn . ϕ(
Domain-Independent Heuristics for Planning
In sections to follow, we investigate how procedural DCK
integrates into SOA domain-independent planners. Domainindependent heuristics are key to the performance of these
planners. Among the best known heuristic-search planners
are those that compute their heuristic by solving a relaxed
STRIPS planning instance (e.g., as done in HSP (Bonet &
Geffner 2001) and FF (Hoffmann & Nebel 2001) planners).
Such a relaxation corresponds to solving the same planning
problem but on an instance that ignores deletes (i.e. ignores
negative effects of actions).
For example, the FF heuristics for a state s is computed
by expanding a relaxed planning graph (Hoffmann & Nebel
2001) from s. We can view this graph as composed of relaxed states. A relaxed state at depth n + 1 is generated by
adding all the effects of actions that can be performed in the
relaxed state of depth n, and then by copying all facts that
appear in layer n. The graph is expanded until the goal or a
fixed point is reached. The heuristic value for s corresponds
to the number of actions in a relaxed plan for the goal, which
can be extracted in polynomial time.
Both FF-like heuristics and HSP-like heuristics can be
computed for (more expressive) ADL planning problems.
(1)
(2)
(3)
A Language for Procedural Control
In contrast to state-centric languages, that often use LTLlike logical formulae to specify properties of the states traversed during plan execution, procedural DCK specification
languages are predominantly action-centric, defining a plan
template or skeleton that dictates actions to be used at various stages of the plan.
Procedural control is specified via programs rather than
logical expressions. The specification language for these
programs incorporates desirable elements from imperative
programming languages such as iteration and conditional
where ϕ is a BFQ whose only free variables are among x
and y , R is a predicate, f is a function, and obj is an object
After performing a ground operator – or action – O(c) in a
certain state s, for all tuples of objects that may instantiate y
such that ϕ(c, y ) holds in s, effect (1) (resp. (2)) expresses
that R(c, y) becomes true (resp. false), and effect (3) expresses that f (c, y ) takes the value obj. As usual, states are
represented as finite sets of atoms (ground formulae of the
form R(c) or of the form f (c) = obj).
27
• ( load(C, P ); f ly(P, LA) | load(C, T ); drive(T, LA) ):
Either load C on the plane P or on the truck T , and
perform the right action to move the vehicle to LA.
constructs. However, to make the language more suitable to
planning applications, it also incorporates nondeterministic
constructs. These elements are key to writing flexible control since they allow programs to contain missing or open
program segments, which are filled in by a planner at the
time of plan generation. Finally, our language also incorporates property testing, achieved through so-called test actions. These actions are not real actions, in the sense that
they do not change the state of the world, rather they can
be used to specify properties of the states traversed while
executing the plan. By using test actions, our programs
can also specify properties of executions similarly to statecentric specification languages.
The rest of this section describes the syntax and semantics
of the procedural DCK specification language we propose to
use. We conclude this section by formally defining what it
means to plan under the control of such programs.
Semantics
The problem of planning for an instance I under the control
of program σ corresponds to finding a plan for I that is also
an execution of σ from the initial state. In the rest of this section we define what those legal executions are. Intuitively,
we define a formal device to check whether a sequence of
actions a corresponds to the execution of a program σ. The
device we use is a nondeterministic finite state automaton
with ε-transitions (ε-NFA).
For the sake of readability, we remind the reader that εNFAs are like standard nondeterministic automata except
that they can transition without reading any input symbol,
through the so-called ε-transitions. ε-transitions are usually
defined over a state of the automaton and a special symbol
ε, denoting the empty symbol.
An ε-NFA Aσ,I is defined for each program σ and each
planning instance I. Its alphabet is the set of operator names,
instantiated by objects of I. Its states are program configurations which have the form [σ, s], where σ is a program
and s is a planning state. Intuitively, as it reads a word of actions, it keeps track, within its state [σ, s], of the part of the
program that remains to be executed, σ, as well as the current planning state after performing the actions it has read
already, s.
Formally, Aσ,I = (Q, A, δ, qo , F ), where Q is the set of
program configurations, the alphabet A is a set of domain
actions, the transition function is δ : Q × (A ∪ {ε}) → 2Q ,
q0 = [σ, Init ], and F is the set of final states. The transition
function δ is defined as follows for atomic programs.
Syntax
The language we propose is based on G OLOG (Levesque et
al. 1997), a robot programming language developed by the
cognitive robotics community. In contrast to G OLOG, our
language supports specification of types for program variables, but does not support procedures.
Programs are constructed using the implicit language for
actions and boolean formulae defined by a particular planning instance I. Additionally, a program may refer to variables drawn from a set of program variables V . This set
V will contain variables that are used for nondeterministic
choices of arguments. In what follows, we assume O denotes the set of operator names from Ops, fully instantiated
with objects defined in I or elements of V .
The set of programs over a planning instance I and a set
of program variables V can be defined by induction. In what
follows, assume φ is a boolean formula with quantifiers on
the language of I, possibly including terms in the set of program variables V . Atomic programs are as follows.
1. nil : Represents the empty program.
2. o: Is a single operator instance, where o ∈ O.
3. any: A keyword denoting “any action”.
4. φ?: A test action.
If σ1 , σ2 and σ are programs, so are the following:
1. (σ1 ; σ2 ): A sequence of programs.
2. if φ then σ1 else σ2 : A conditional sentence.
3. while φ do σ: A while-loop.
4. σ ∗ : A nondeterministic iteration.
5. (σ1 |σ2 ): Nondeterministic choice between two programs.
6. π(x-t) σ: Nondeterministic choice of variable x ∈ V of
type t ∈ T .
Before we formally define the semantics of the language,
we show some examples that give a sense of the language’s
expressiveness and semantics.
• while ¬clear(B) do π(b-block ) putOnT able(b): while
B is not clear choose any b of type block and put it on the
table.
• any ∗ ; loaded(A, T ruck)?: Perform any sequence of actions until A is loaded in T ruck. Plans under this control
are such that loaded(A, T ruck) holds in the final state.
δ([a, s], a) = {[nil , s ]} iff Succ(s, a, s ), s.t. a ∈ A,
δ([any, s], a) = {[nil, s ]} iff Succ(s, a, s ), s.t. a ∈ A,
δ([φ?, s], ε) = {[nil , s]} iff s |= φ.
(4)
(5)
(6)
Equations 4 and 5 dictate that actions in programs change
the state according to the Succ relation. Finally, Eq. 6 defines transitions for φ? when φ is a sentence (i.e., a formula
with no program variables). It expresses that a transition can
only be carried out if the plan state so far satisfies φ.
Now we define δ for non-atomic programs. In the definitions below, assume that a ∈ A ∪ {ε}, and that σ1 and σ2 are
subprograms of σ , where occurring elements in V may have
been instantiated by any object in the planning instance I .
δ([(σ1 ; σ2 ), s], a) =
[
{[(σ1 ; σ2 ), s ]} if σ1 = nil ,
(7)
,s ]∈δ([σ ,s],a)
[σ1
1
δ([(nil; σ2 ), s], a) = δ([σ2 , s], a),
(
δ([if φ then σ1 else σ2 , s], a) =
(8)
δ([σ1 , s], a) if s |= φ,
δ([σ2 , s], a) if s |= φ,
δ([(σ1 |σ2 ), s], a) = δ([σ1 , s], a) ∪ δ([σ2 , s], a),
(
{[nil , s]}
if s |= φ and a = ε,
δ([while φ do σ1 , s], a) =
δ([σ1 ; while φ do σ1 , s], a) if s |= φ,
δ([σ1∗ , s], a) = δ([(σ1 ; σ1∗ ), s], a) if a = ε
28
(9)
δ([σ1∗ , s], ε) = δ([(σ1 ; σ1∗ ), s], ε) ∪ {[nil , s]},
[
δ([σ1 |x/o , s], a).
δ([π(x-t) σ1 , s], a) =
(10)
test(¬φ)
(11)
1
(o,t)∈τD ∪τP
test(φ)
test(ψ)
test(¬ψ)
where σ1 |x/o denotes the program resulting from replacing
any occurrence of x in σ1 by o. For space reasons we only
explain two of them. First, a transition on a sequence corresponds to transitioning on its first component first (Eq. 7),
unless the first component is already the empty program, in
which case we transition on the second component (Eq. 8).
On the other hand, a transition of σ1∗ represents two alternatives: executing σ1 at least once, or stopping the execution
of σ1∗ , with the remaining program nil (Eq. 9, 10).
To end the definition of Aσ,I , Q corresponds precisely to
the program configurations [σ , s] where σ is either nil or
a subprogram of σ such that program variables may have
been replaced by objects in I, and s is any possible planning state. Moreover, δ is assumed empty for elements of its
domain not explicitly mentioned above. Finally, the set of
accepting states is F = {[nil , s] | s is any state over I}, i.e.,
those where no program remains in execution. We can now
formally define an execution of a program.
Definition 1 (Execution of a program). A sequence of actions a1 · · · an is an execution of σ in I if a1 · · · an is accepted by Aσ,I .
The following remark illustrates how the automaton transitions in order to accept executions of a program.
Remark 1. Let σ = (if ϕ then a else b; c), and suppose
that Init is the initial state of planning instance I. Assume
furthermore that a, b, and c are always possible. Then Aσ,I
accepts ac if Init |= ϕ.
Proof. Suppose q a q denotes that Aσ,I can transition
from q to q by reading symbol a. Then if Init |= ϕ observe
that [σ, Init ] a [nil ; c, s2 ] c [nil , s3 ], for some planning
states s2 and s3 .
Now that we have defined those sequences of actions corresponding to the execution of our program, we are ready to
define the notion of planning under procedural control.
Definition 2 (Planning under procedural control). A sequence of action a is a plan for instance I under the control
of program σ if a is a plan in I and is an execution of σ in I.
3
2
5
a
4 noop
b
noop
6
noop
8
7
c
9
if
while
sequence
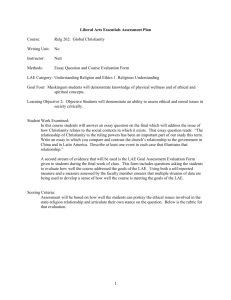
Figure 1: Automaton for while φ do (if ψ then a else b); c.
ple program shown as a finite state automaton. Intuitively,
the operators we generate in the compilation define the transitions of this automaton. Their preconditions and effects
condition on and change the automaton’s state.
The translation is defined inductively by a function
C(σ, n, E) which takes as input a program σ, an integer n, and a list of program variables with types E =
[e1 -t1 , . . . , ek -tk ], and outputs a tuple (L, L , n ) with L a
list of domain-independent operator definitions, L a list of
domain-dependent operator definitions, and n another integer. Intuitively, E contains the program variables whose
scope includes (sub-)program σ. Moreover, L contains restrictions on the applicability of operators defined in D, and
L contains additional control operators needed to enforce
the search control defined in σ. Integers n and n abstractly
denote the program state before and after execution of σ.
We use two auxiliary functions. Cnoop(n1 , n2 ) produces
an operator definition that allows a transition from state n1
to n2 . Similarly Ctest(φ, n1 , n2 , E) defines the same transition, but conditioned on φ. They are defined as:1
Cnoop(n1 , n2 ) = noop n1 n2 (), [ ], state = sn1 , [state = sn2 ]
x), t, Prec(
x), Eff (
x) with
Ctest(φ, n1 , n2 , E) = test n1 n2 (
= e1 -t1 , . . . , em -tm ,
(e-t,
x) = mentions(φ, E), e-t
`
Prec(
x) = state = sn1 ∧ φ[ei /xi ]m
i=1 ∧
^m
´
bound(ei ) → map(ei , xi ) ,
i=1
Eff (
x) = [state = sn2 ] · [bound(ei ), map(ei , xi )]m
i=1 .
of program
Function mentions(φ, E) returns a vector e-t
variables and types that occur in φ, and a vector x of new
variables of the same length. Bookkeeping predicates serve
the following purposes: state denotes the state of the automaton; bound(e) expresses that the program variable e
has been bound to an object of the domain; map(e, o) states
that this object is o. Thus, the implication bound(ei ) →
map(ei , xi ) forces parameter xi to take the value to which
ei is bound, but has no effect if ei is not bound.
Consider the inner box of Figure 1, depicting the compilation of the if statement. It is defined as:
Compiling Control into the Action Theory
This section describes a translation function that, given a
program σ in the DCK language defined above together with
a PDDL2.1 domain specification D, outputs a new PDDL2.1
domain specification Dσ and problem specification Pσ . The
two resulting specifications can then be combined with any
problem P defined over D, creating a new planning instance
that embeds the control given by σ, i.e. that is such that only
action sequences that are executions of σ are possible. This
enables any PDDL2.1-compliant planner to exploit search
control specified by any program.
To account for the state of execution of program σ and
to describe legal transitions in that program, we introduce
a few bookkeeping predicates and a few additional actions.
Figure 1 graphically illustrates the translation of an exam-
C(if φ then σ1 else σ2 , n, E) = (L1 · L2 · X, L1 · L2 , n3 )
with (L1 , L1 , n1 ) = C(σ1 , n + 1, E),
(L2 , L2 , n2 ) = C(σ2 , n1 + 1, E), n3 = n2 + 1,
X = [ Ctest(φ, n, n + 1, E), Ctest(¬φ, n, n1 + 1, E),
Cnoop(n1 , n3 ), Cnoop(n2 , n3 ) ]
and in the example we have φ = ψ, n = 2, n1 = 4, n2 =
6, n3 = 7, σ1 = a, and σ2 = b.
1
29
We use A · B to denote the concatenation of lists A and B.
The inductive definitions for other programs σ are:
As is shown below, planning in the generated instance
Iσ = (Dσ , Pσ ) is equivalent to planning for the original
instance I = (D, P ) under the control of program σ, except that plans on Iσ contain actions that were not part of
the original domain definition (test, noop, and free).
Theorem 1 (Correctness). Let Filter(a, D) denote the sequence that remains when removing from a any action not
defined in D. If a is a plan for instance Iσ = (Dσ , Pσ ) then
Filter(a, D) is a plan for I = (D, P ) under the control of σ.
Conversely, if a is a plan for I under the control of σ, there
exists a plan a for Iσ , such that a = Filter(a , D).
Proof. See (Baier, Fritz, & McIlraith 2007).
Now we turn our attention to analyzing the succinctness
of the output planning instance relative to the original instance and control program. Assume we define the size of a
program as the number of programming constructs and actions it contains. Then we obtain the following result.
Theorem 2 (Succinctness). If σ is a program of size m,
and k is the maximal nesting depth of π(x-t) statements in
σ, then |Iσ | (the overall size of Iσ ) is O(km).
Proof. See (Baier, Fritz, & McIlraith 2007).
The encoding of programs in PDDL2.1 is, hence, in worst
case O(k) times bigger than the program itself. It is also
easy to show that the translation is done in time linear in the
size of the program, since, by definition, every occurrence
of a program construct is only dealt with once.
C(nil , n, E) = ([ ], [ ], n)
x), Eff (
x)], n + 1) with
C(O(r), n, E) = ([ ], [O(
x), t, Prec (
O(
x), t, Prec(
x), Eff (
x) ∈ Ops, r = r1 , . . . , rm ,
x) = (state = sn ∧
Prec (
^
bound(ri ) → map(ri , xi ) ∧
i s.t. ri ∈E
^
xi = ri ),
i s.t. ri ∈E
Eff (
x) = [ state = sn ⇒ state = sn+1 ] ·
[state = sn ⇒ bound(ri ) ∧ map(ri , xi )]i s.t. ri ∈E
C(φ?, n, E) = ( [Ctest(φ, n, n + 1, E)], [ ], n + 1)
C((σ1 ; σ2 ), n, E) = (L1 · L2 , L1 · L2 , n2 ) with
(L1 , L1 , n1 ) = C(σ1 , n, E), (L2 , L2 , n2 ) = C(σ2 , n1 , E)
C((σ1 |σ2 ), n, E) = (L1 · L2 · X, L1 · L2 , n2 + 1) with
(L1 , L1 , n1 ) = C(σ1 , n + 1, E),
(L2 , L2 , n2 ) = C(σ2 , n1 + 1, E),
X = [ Cnoop(n, n + 1), Cnoop(n, n1 + 1),
Cnoop(n1 , n2 + 1), Cnoop(n2 , n2 + 1) ]
C(while φ do σ, n, E) = (L · X, L , n1 + 1) with
(L, L , n1 ) = C(σ, n + 1, E), X = [Ctest(φ, n, n + 1, E),
Ctest(¬φ, n, n1 + 1, E), Cnoop(n1 , n)]
C(σ ∗ , n, E) = (L · [Cnoop(n, n2 ), Cnoop(n1 , n)], L , n2 )
with (L, L , n1 ) = C(σ, n, E), n2 = n1 + 1
C(π(x-t, σ), n, E) = (L · X, L , n1 + 1) with
(L, L , n1 ) = C(σ, n, E · [x-t]),
X = [f ree n1 (x), t, state = sn1 ,
[state = sn1 +1 , ¬bound(x), ∀y.¬map(x, y)] ]
Exploiting DCK in SOA Heuristic Planners
Our objective in translating procedural DCK to PDDL2.1
was to enable any PDDL2.1-compliant SOA planner to
seamlessly exploit our DCK. In this section, we investigate
ways to best leverage our translated domains using domainindependent heuristic search planners.
There are several compelling reasons for wanting to apply domain-independent heuristic search to these problems.
Procedural DCK can take many forms. Often, it will provide explicit actions for some parts of a sequential plan, but
not for others. In such cases, it will contain unconstrained
fragments (i.e., fragments with nondeterministic choices of
actions) where the designer expects the planner to figure
out the best choice of actions to realize a sub-task. In
the absence of domain-specific guidance for these unconstrained fragments, it is natural to consider using a domainindependent heuristic to guide the search.
In other cases, it is the choice of action arguments that
must be optimized. In particular, fragments of DCK may
collectively impose global constraints on action argument
choices that need to be enforced by the planner. As such,
the planner needs to be aware of the procedural control in
order to avoid backtracking. By way of illustration, consider a travel planning domain comprising two tasks “buy
air ticket” followed by “book hotel”. Each DCK fragment
restricts the actions that can be used, but leaves the choice
of arguments to the planner. Further suppose that budget is
limited. We would like our planner to realize that actions
used to complete the first part should save enough money to
complete the second task. The ability to do such lookahead
can be achieved via domain-independent heuristic search.
The atomic program any is handled by macro expansion to
above defined constructs.
As mentioned above, given program σ, the return value
(L, L , nfinal ) of C(σ, 0, [ ]) is such that L contains new operators for encoding transitions in the automaton, whereas L
contains restrictions on the applicability of the original operators of the domain. Now we are ready to integrate these new
operators and restrictions with the original domain specification D to produce the new domain specification Dσ .
Dσ contains a constrained version of each operator O(x) of the original domain D.
Let
n
[O(x), t, Prec i (x), Eff i (x)]i=1 be the sublist of L
that contains additional conditions for operator O(x). The
operator replacing O(x) in Dσ is defined as:
O (
x), t, Prec(
x) ∧
_n
Prec i (
x), Eff (
x) ∪
i=1
[n
Eff i (
x)
i=1
Additionally, Dσ contains all operator definitions in L. Objects in Dσ are the same as those in D, plus a few new ones
to represent the program variables and the automaton’s states
si ( 0 ≤ i ≤ nfinal ). Finally Dσ inherits all predicates in D
plus bound(x), map(x, y), and function state.
The translation, up to this point, is problem-independent;
the problem specification Pσ is defined as follows. Given
any predefined problem P over D, Pσ is like P except that
its initial state contains condition state = s0 , and its goal
contains state = snfinal . Those conditions ensure that the
program must be executed to completion.
30
test(not φ)
In the rest of the section we propose three ways in which
one can leverage our translated domains using a domainindependent heuristic planner. These three techniques differ
predominantly in the operands they consider in computing
heuristics.
Direct Use of Translation (Simple) As the name suggests,
a simple way to provide heuristic guidance while enforcing
program awareness is to use our translated domain directly
with a domain-independent heuristic planner. In short, take
the original domain instance I and control σ, and use the
resulting instance Iσ with any heuristic planner.
Unfortunately, when exploiting a relaxed graph to compute heuristics, two issues arise. First, since both the
map and bound predicates are relaxed, whatever value
is already assigned to a variable, will remain assigned
to that variable. This can cause a problem with itdef
erative control. For example, assume program σL =
while φ do π(c-crate) unload(c, T ), is intended for a domain where crates can be only unloaded sequentially from a
truck. While expanding the relaxed plan, as soon as variable
c is bound to some value, action unload can only take that
value as argument. This leads the heuristic to regard most
instances as unsolvable, returning misleading estimates.
The second issue is one of efficiency. Since fluent state
is also relaxed, the benefits of the reduced branching factor
induced by the programs is lost. This could slow down the
computation of the heuristic significantly.
Modified Program Structure (H-ops) The H-ops approach
addresses the two issues potentially affecting the computation of the Simple heuristic. It is designed to be used with
planners that employ relaxed planning graphs for heuristic computation. The input to the planner in this case is a
pair (Iσ , HOps), where Iσ = (Dσ , Pσ ) is the translated instance, and HOps is an additional set of planning operators.
The planner uses the operators in Dσ to generate successor states while searching. However, when computing the
heuristic for a state s it uses the operators in HOps.
Additionally, function state and predicates bound and
map are not relaxed. This means that when computing the
relaxed graph we actually delete their instances from the relaxed states. As usual, deletes are processed before adds.
The expansion of the graph is stopped if the goal or a fixed
point is reached. Finally, a relaxed plan is extracted in the
usual way, and its length is reported as the heuristic value.
The un-relaxing of state, bound and map addresses the
problem of reflecting the reduced branching factor provided by the control program while computing the heuristics. However, it introduces other problems. Returning to the
σL program defined above, since state is now un-relaxed,
the relaxed graph expansion cannot escape from the loop,
because under the relaxed planning semantics, as soon as φ
is true, it remains true forever. A similar issue occurs with
the nondeterministic iteration.
This issue is addressed by the HOps operators. Due to
lack of space we only explain how these operators work in
the case of the while loop. To avoid staying in the loop
forever, the loop will be exited when actions in it are no
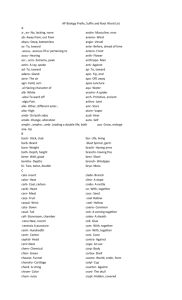
longer adding effects. Figure 2 provides a graphical repre-
1
test(φ)
2
test(fp ≤ 5)
7
test(fp > 5)
8
Figure 2: H-ops translation of while loops. While computing the heuristics, pseudo-fluent fp is increased each time
no new effect is added into the relaxed state, and it is set
to 0 otherwise. The loop can be exited if the last five (7-2)
actions performed didn’t add any new effect.
sentation. An important detail to note is that the loop is not
entered when φ is not found true in the relaxed state. (The
expression not φ should be understood as negation as failure.) Moreover, the pseudo-fluent f p is an internal variable
of the planner that acts as a real fluent for the HOps.
Since loops are guaranteed to be exited, the computation
of H-ops is guaranteed to finish because at some relaxed
state the final state of the automaton will be reached. At this
point, if the goal is not true, no operators will be possible
and a fixed point will be produced immediately.
A Program-Unaware Approach (Basic) Our programunaware approach (Basic) completely ignores the program
when computing heuristics. Here, the input to the planner
is a pair (Iσ , Ops), where Iσ is the translated instance, and
Ops are the original domain operators. The Ops operators
are used exclusively to compute the heuristic. Hence, Basic’s output is not at all influenced by the control program.
Although Basic is program unaware, it can sometimes
provide good estimates, as we see in the following section.
This is especially true when the DCK characterizes a solution that would be naturally found by the planner if no control were used. It is also relatively fast to compute.
Implementation and Experiments
Our implementation2 takes a PDDL planning instance and
a DCK program and generates a new PDDL planning instance. It will also generate appropriate output for the Basic
and H-ops heuristics, which require a different set of operators. Thus, the resulting PDDL instance may contain definitions for operators that are used only for heuristic computation using the :h-action keyword, whose syntax is
analogous to the PDDL keyword :action.
Our planner is a modified version of TLP LAN, which
does a best-first search using an FF-style heuristic. It is capable of reading the PDDL with extended operators.
We performed our experiments on the trucks, storage and
rovers domains (30 instances each). We wrote DCK for
these domains. For lack of space, we do not show the DCK
in detail, however for trucks we used the control shown as
an example in the Introduction. We ran our three heuristic approaches (Basic, H-ops, and Simple) and cycle-free,
depth-first search on the translated instance (blind). Additionally, we ran the original instance of the program (DCKfree) using the domain-independent heuristics provided by
the planner (original). Table 1 shows various statistics on
the performance of the approaches. Furthermore, Fig. 3
shows times for the different heuristic approaches.
2
31
Available at www.cs.toronto.edu/kr/systems
Trucks
Rovers
Storage
#n
#s
min
avg
max
#n
#s
min
avg
max
#n
#s
min
avg
max
original
1
9
1
1.1
1.2
1
10
1
2.13
4.59
1
18
1
4.4
21.11
Simple
0.31
9
1
1.03
1.2
0.74
19
1
1.03
1.2
1.2
18
1
1.05
1.29
Basic
0.41
15
1
1.02
1.07
1.06
28
1
1.05
1.3
1.13
20
1
1.01
1.16
H-ops
0.26
14
1
1.04
1.2
1.06
22
1
1.21
1.7
0.76
21
1
1.07
1.48
blind
19.85
3
1
1.04
1.07
1.62
30
1
1.53
2.14
1.45
20
1
1.62
2.11
ning instances. Each contribution is of value in and of itself.
The language can be used without the compilation, and the
compiled PDDL2.1 instance can be input to any PDDL2.1compliant SOA planner, not just the domain-independent
heuristic search planner that we propose. Our experiments
show that procedural DCK improves the performance of
SOA planners, and that our heuristics are sometimes key to
achieving good performance.
Much of the previous work on DCK in planning has exploited state-centric specification languages. In particular,
TLP LAN (Bacchus & Kabanza 1998) and TALP LANNER
(Kvarnström & Doherty 2000) employ declarative, statecentric, temporal languages based on LTL to specify DCK.
Such languages define necessary properties of states over
fragments of a valid plan. We argue that they could be less
natural than our procedural specification language.
Though not described as DCK specification languages
there are a number of languages from the agent programming and/or model-based programming communities that
are related to procedural control. Among these are E AG LE,
a goal language designed to also express intentionality (dal
Lago, Pistore, & Traverso 2002). Moreover, G OLOG is a
procedural language proposed as an alternative to planning
by the cognitive robotics community. It essentially constrains the possible space of actions that could be performed
by the programmed agent allowing non-determinism. Our
DCK language can be viewed as a version of G OLOG.
Further, languages such as the Reactive Model-Based Programming Language (RMPL) (Kim, Williams, & Abramson 2001) – a procedural language that combines ideas from
constraint-based modeling with reactive programming constructs – also share expressive power and goals with procedural DCK. Finally, Hierarchical Task Network (HTN) specification languages such as those used in SHOP (Nau et al.
1999) provide domain-dependent hierarchical task decompositions together with partial order constraints, not easily
describable in our language.
A focus of our work was to exploit SOA planners and
planning techniques with our procedural DCK. In contrast,
well-known DCK-enabled planners such as TLP LAN and
TALP LANNER use DCK to prune the search space at each
step of the plan and then employ blind depth-first cycle-free
search to try to reach the goal. Unfortunately, pruning is
only possible for maintenance-style DCK and there is no
way to plan towards achieving other types of DCK as there
is with the heuristic search techniques proposed here.
Similarly, G OLOG interpreters, while exploiting procedural DCK, have traditionally employed blind search to instantiate nondeterministic fragments of a G OLOG program.
Most recently, Claßen et al. (2007) have proposed to integrate an incremental G OLOG interpreter with a SOA planner. Their motivation is similar to ours, but there is a subtle difference: they are interested in combining agent programming and efficient planning. The integration works
by allowing a G OLOG program to make explicit calls to a
SOA planner to achieve particular conditions identified by
the user. The actual planning, however, is not controlled in
any way. Also, since the G OLOG interpreter executes the
returned plan immediately without further lookahead, back-
Table 1: Comparison between different approaches to planning
(with DCK). #n is the average factor of expanded nodes to the
number of nodes expanded by original (i.e., #n=0.26 means the
approach expanded 0.26 times the number of nodes expanded by
original). #s is the number of problems solved by each approach.
avg denotes the average ratio of the plan length to the shortest plan
found by any of the approaches (i.e., avg =1.50 means that on average, on each instance, plans where 50% longer than the shortest
plan found for that instance). min and max are defined analogously.
Not surprisingly, our data confirms that DCK helps to
improve the performance of the planner, solving more instances across all domains. In some domains (i.e. storage
and rovers) blind depth-first cycle-free search is sufficient
for solving most of the instances. However, quality of solutions (plan length) is poor compared to the heuristic approaches. In trucks, DCK is only effective in conjunction
with heuristics; blind search can solve very few instances.
We observe that H-ops is the most informative (expands
fewer nodes). This fact does not pay off in time in the experiments shown in the table. Nevertheless, it is easy to construct instances where the H-ops performs better than Basic.
This happens when the DCK control restricts the space of
valid plans (i.e., prunes out valid plans). We have experimented with various instances of the storage domain, where
we restrict the plan to use only one hoist. In some of these
cases H-ops outperforms Basic by orders of magnitude.
Summary and Related Work
DCK can be used to constrain the set of valid plans and
has proven an effective tool in reducing the time required
to generate a plan. Nevertheless, many of the planners that
exploit it use arguably less natural state-centric DCK specification languages, and their planners use blind search. In
this paper we examined the problem of exploiting procedural DCK with SOA planners. Our goal was to specify rich
DCK naturally in the form of a program template and to
exploit SOA planning techniques to actively plan towards
the achievement of this DCK. To this end we made three
contributions: provision of a procedural DCK language syntax and semantics; a polynomial-time algorithm to compile
DCK and a planning instance into a PDDL2.1 planning instance that could be input to any PDDL2.1-compliant planner; and finally a set of techniques for exploiting domainindependent heuristic search with our translated DCK plan-
32
100
100
100
10
original
Basic
1
10
original
Basic
1
H-ops
0.1
0.1
Simple
0
5
10
15
problem
20
25
(a) rovers
10
original
Basic
1
H-ops
H-ops
0.1
Simple
blind
0.01
seconds
1000
seconds
1000
seconds
1000
Simple
blind
30
0.01
0
5
10
15
problem
20
(b) storage
25
blind
30
0.01
0
5
10
15
problem
20
25
(c) trucks
Figure 3: Running times of the three heuristics and the original instance; logarithmic scale; run on an Intel Xeon, 3.6GHz, 2GB RAM
tracking does not extend over the boundary between G OLOG
and the planner. As such, each fragment of nondeterminism
within a program is treated independently, so that actions
selected locally are not informed by the constraints of later
fragments as they are with the approach that we propose.
Their work, which focuses on the semantics of ADL in the
situation calculus, is hence orthogonal to ours.
Finally, there is related work that compiles DCK into standard planning domains. Baier & McIlraith (2006), Cresswell & Coddington (2004), Edelkamp (2006), and Rintanen (2000), propose to compile different versions of LTLbased DCK into PDDL/ADL planning domains. The main
drawback of these approaches is that translating full LTL
into ADL/PDDL is worst-case exponential in the size of the
control formula whereas our compilation produces an addition to the original PDDL instance that is linear in the size
of the DCK program. Son et al. (2006) further show how
HTN, LTL, and G OLOG-like DCK can be encoded into planning instances that can be solved using answer set solvers.
Nevertheless, they do not provide translations that can be integrated with PDDL-compliant SOA planners, nor do they
propose any heuristic approaches to planning with them.
Acknowledgments We are grateful to Yves Lespérance
and the ICAPS anonymous reviewers for their feedback.
This research was funded by Natural Sciences and Engineering Research Council of Canada (NSERC) and the Ontario
Ministry of Research and Innovation (MRI).
of the 20th Int’l Joint Conference on Artificial Intelligence
(IJCAI-07), 1846–1851.
Cresswell, S., and Coddington, A. M. 2004. Compilation
of LTL goal formulas into PDDL. In Proc. of the 16th
European Conference on Artificial Intelligence (ECAI-04),
985–986.
dal Lago, U.; Pistore, M.; and Traverso, P. 2002. Planning
with a language for extended goals. In Proc. of AAAI/IAAI,
447–454.
Edelkamp, S. 2006. On the compilation of plan constraints and preferences. In Proc. of the 16th Int’l Conference on Automated Planning and Scheduling (ICAPS-06),
374–377.
Fox, M., and Long, D. 2003. PDDL2.1: An extension to
PDDL for expressing temporal planning domains. Journal
of Artificial Intelligence Research 20:61–124.
Hoffmann, J., and Nebel, B. 2001. The FF planning system: Fast plan generation through heuristic search. Journal
of Artificial Intelligence Research 14:253–302.
Kim, P.; Williams, B. C.; and Abramson, M. 2001. Executing reactive, model-based programs through graph-based
temporal planning. In Proc. of the 17th Int’l Joint Conference on Artificial Intelligence (IJCAI-01), 487–493.
Kvarnström, J., and Doherty, P. 2000. TALPlanner: A
temporal logic based forward chaining planner. Annals of
Mathematics and Artificial Intelligence 30(1-4):119–169.
Levesque, H.; Reiter, R.; Lespérance, Y.; Lin, F.; and
Scherl, R. B. 1997. GOLOG: A logic programming language for dynamic domains. Journal of Logic Programming 31(1-3):59–83.
Nau, D. S.; Cao, Y.; Lotem, A.; and Muñoz-Avila, H. 1999.
SHOP: Simple hierarchical ordered planner. In Proc. of
the 16th Int’l Joint Conference on Artificial Intelligence
(IJCAI-99), 968–975.
Rintanen, J. 2000. Incorporation of temporal logic control
into plan operators. In Horn, W., ed., Proc. of the 14th
European Conference on Artificial Intelligence (ECAI-00),
526–530. Berlin, Germany: IOS Press.
Son, T. C.; Baral, C.; Nam, T. H.; and McIlraith,
S. A. 2006. Domain-dependent knowledge in answer
set planning. ACM Transactions on Computational Logic
7(4):613–657.
References
Bacchus, F., and Kabanza, F. 1998. Planning for temporally extended goals. Annals of Mathematics and Artificial
Intelligence 22(1-2):5–27.
Baier, J. A., and McIlraith, S. A. 2006. Planning with firstorder temporally extended goals using heuristic search. In
Proc. of the 21st National Conference on Artificial Intelligence (AAAI-06), 788–795.
Baier, J.; Fritz, C.; and McIlraith, S. 2007. Exploiting procedural domain control knowledge in state-of-the-art planners (extended version). Technical Report CSRG-565, University of Toronto.
Bonet, B., and Geffner, H. 2001. Planning as heuristic
search. Artificial Intelligence 129(1-2):5–33.
Claßen, J.; Eyerich, P.; Lakemeyer, G.; and Nebel, B. 2007.
Towards an integration of Golog and planning. In Proc.
33