CaMeL: Learning Method Preconditions for HTN Planning
Okhtay Ilghami & Dana S. Nau
Héctor Muñoz-Avila
David W. Aha
Department of Computer Science
University of Maryland
College Park, MD 20742-3255
{okhtay,nau}@cs.umd.edu
Dept. of Comp. Sci. and Eng.
Lehigh University
Bethlehem, PA 18015
munoz@cse.lehigh.edu
Navy Center for Applied Research in AI
Naval Research Laboratory (Code 5515)
Washington, DC 20375
aha@aic.nrl.navy.mil
Abstract
A great challenge in using any planning system to solve
real-world problems is the difficulty of acquiring the domain knowledge that the system will need. We present
a way to address part of this problem, in the context of
Hierarchical Task Network (HTN) planning, by having
the planning system incrementally learn conditions for
HTN methods under expert supervision. We present a
general formal framework for learning HTN methods,
and a supervised learning algorithm, named CaMeL,
based on this formalism. We present theoretical results
about CaMeL’s soundness, completeness, and convergence properties. We also report experimental results
about its speed of convergence under different conditions. The experimental results suggest that CaMeL has
the potential to be useful in real-world applications.
Introduction
A great challenge in using any planning system to solve
real-world problems is the difficulty of acquiring the domain knowledge and the associated control rules (i.e., rules
that help the planner to search the search space efficiently)
that abstract the real-world domain. One way to address
this issue is to design the planning system to learn the constituents of the planning domain and the associated control
rules. This requires the system to be supervised by a domain
expert who solves instances of the problems in that domain.
This will result in a supervised learning process. In this paper, we discuss a supervised incremental learning algorithm
in a Hierarchical Task Network (HTN) planning context.
In recent years, several researchers have reported work on
the HTN planning formalism and its applications (Wilkins
1990; Currie & Tate 1991; Erol, Hendler, & Nau 1994).
The hierarchical semantics of this kind of planning gives
us the ability to model planning problems in domains that
are naturally hierarchical. A good example is planning in
military environments, where conventional linear STRIPSstyle planners (Fikes & Nilsson 1971) cannot be exploited
to abstract the planning problems accurately. An example of
using HTN planning in such environments is a system called
HICAP (Muñoz-Avila et al. 1999), which has been used to
c 2002, American Association for Artificial IntelliCopyright gence (www.aaai.org). All rights reserved.
assist with the authoring of plans for noncombatant evacuation operations (NEOs). To support plan authoring, HICAP
integrates the SHOP hierarchical planner (Nau et al. 1999)
together with a case-based reasoning (CBR) system named
NaCoDAE (Aha & Breslow 1997).
As with any incremental learning problem, there are at
least two approaches that one might consider for learning
HTN methods. First, a lazy (e.g., CBR) approach can be
used to directly replay plans previously generated by the human expert. It assumes that plans which were successfully
used in situations similar to the current situation are likely to
work now. Second, an eager approach can be used to induce
methods that could be used to mimic human expertise. In
either approach, adding new training samples, which represent human expert activities while solving an HTN planning
problem, is expected to yield better approximations of the
domain. However, due to the complexity of the semantics
of HTN planning, one should carefully define the inputs and
outputs of the learning algorithm and what learning means
in this context.
In this paper, we adopt an eager approach. We also introduce a theoretical basis for formally defining algorithms
that learn preconditions for HTN methods. This formalism
models situations when:
• General information is available concerning the possible
decompositions of tasks into subtasks, but without sufficient details to determine the conditions under which each
decomposition will succeed.
• Plan traces, known to be successful or unsuccessful, are
available for certain problem instances.
Such situations occur in several important practical domains, such as the domain of NEOs(DoD 1994; Lamber
1992), in which military doctrine provides the planner with
general information about how to conduct a NEO mission,
but does not specify details.
We also introduce CaMeL (Candidate Elimination
Method Learner), an algorithm that instantiates this formalism. We state theorems about CaMeL’s soundness, completeness, and convergence properties. Our experimental results reveal the speed with which CaMeL converges in different situations and suggest that CaMeL has the potential
for use in deployed systems.
AIPS 2002
131
Hierarchical Task Network Planning
In an HTN planning system, instead of having traditional
STRIPS-style operators with delete and add lists used to
achieve goal predicates (Fikes & Nilsson 1971), the main
goal of planning is to accomplish a list of given tasks. Each
task can be decomposed into several subtasks using predefined methods. Each possible decomposition represents a
new branch in the search space of the problem. At the bottom level of this hierarchy lie primitive tasks, whose actions
can be executed using an atomic operator. In summary, the
plan still consists of a list of instantiations of operators, partially ordered in some planners and fully ordered in other
ones, but the correctness definition of the plan differs. In
traditional planning, a plan is correct if it is executable, and
the goal state is a subset of the world state after the plan’s
execution (i.e., each goal atom is achieved by some operator in the plan). In HTN planning, a plan is correct if it is
executable in the initial state of the world, and it achieves
the task list that is given as an input in the planning problem using the methods defined as a part of the planning domain. In other words, the main focus of an HTN planner is
task decomposition, while a traditional planner focuses on
achieving the desired state. In this paper we use a form of
HTN planning called Ordered Task Decomposition (Nau et
al. 1999) in which, at each point in the planning process, the
planner has a totally ordered list of tasks to accomplish.
An HTN domain is a triple (T, M, O) where:
• T is a list of tasks. Each task has a name and zero or more
arguments, each of which is either a variable symbol1 or
a constant symbol. Each task can be either primitive or
non-primitive. A primitive task represents a concrete action, while a non-primitive task must be decomposed into
simpler subtasks.
• M is a collection of methods, each of which is a triple
m = (N T, DEC, P ), where N T is a non-primitive task,
DEC is a totally-ordered list of tasks called a decomposition of N T , and P (the set of preconditions) is a boolean
formula of first-order predicate calculus. Every free variable in P must appear in the argument list of N T , and
every variable in DEC must appear either in the argument list of N T or somewhere in P . We will assume that
each method m can be uniquely identified by its first two
parts, N T and DEC (i.e., there will be no two different
methods (N T, DEC, P ) and (N T, DEC, P ) such that
P = P ).
• O is a collection of operators, each of which is a triple
o = (P T, DEL, ADD), where P T is a primitive task,
and DEL and ADD are the sets of logical atoms that will
be respectively deleted from and added to the world state
when the operator is executed. All variables in DEL and
ADD must appear in the argument list of P T . We also
assume that, for each primitive task t ∈ T , there is at most
one operator (P T, DEL, ADD) such that t unifies with
P T (i.e., each primitive task can be performed in at most
one way).
1
We denote variable symbols by names that begin with question
marks, such as ?x.
132
AIPS 2002
An HTN planning problem is a triple (I, S, D), where I
(the initial task list) is a totally ordered list of ground instances of tasks (i.e., members of T ) to be performed, S (the
initial state of the world) is a set of ground logical atoms,
and D = (T, M, O) is an HTN domain.
A binding θ is a set of pairs (V, C), where V is a variable
symbol and C is a constant symbol. In other words, θ is
a substitution that replaces variables with constants. The
result of applying a binding θ to an expression e is denoted
by eθ.
The inverse of the binding θ, which replaces every constant C with its corresponding variable V (in θ) is denoted
by θ−1 .
Let m = (N T, DEC, P ) be a method. Then m̄ =
(N T, DEC) is called the incomplete version of m. Similarly, if mθ = ((N T )θ, (DEC)θ, P θ) is an instance of
a method m, then the incomplete version of mθ is m̄θ =
((N T )θ, (DEC)θ). We assume that no two different methods (N T, DEC, P ) and (N T, DEC, P ) can exist such that
P = P . Therefore, there is a one-to-one correspondence
between a set of methods {m1 , . . . , mk } and their incomplete versions {m̄1 , . . . , m̄k }, allowing each incomplete version m̄i to represent mi .
Let D = (T, M, O) be an HTN domain. Then, if M̄
denotes the set of incomplete versions of all methods in M ,
D̄ = (T, M̄ , O) is defined to be the incomplete version of D.
A method (N T, DEC, P ) is applicable in a state S if
there is a binding θ that binds all variables in N T ’s argument
list such that P θ is satisfied in S.
A partial solution tree for a ground instance g of a task in
an HTN domain D = (T, M, O) is an ordered tree τ having
the following properties:
• τ ’s root is g;
• Each node of τ is a ground instance of a task;
• For each non-leaf node N of τ , there is a method m =
(N T, DEC, P ) and a binding θ such that N = (N T )θ
and (C1 , . . . , Ck ) = (DEC)θ, where (C1 , . . . , Ck ) is the
list of the children of N . mθ = ((N T )θ, (DEC)θ, P θ)
is called the method instance for N .
A partial solution forest for an HTN planning problem
(I, S, D) is a totally ordered list (τ1 , . . . , τk ) of partial solution trees, one for each member of I.
In a partial solution forest F = (τ1 , . . . , τk ), a node u
occurs before a node v in each of the following cases:
• u and v are in different trees τi and τj , respectively, where
i < j.
• There is a node w such that u is the i’th child of w and v
is the j’th child of w, where i < j.
• u and v have ancestors u and v , respectively, such that u
occurs before v . (Note that we may have u = u and/or
v = v.)
Given these definitions, it follows that the leaves of a partial solution forest are totally ordered by the “occurs before”
relation.
A solution for a planning problem (I, S, D) is a partial
solution forest F for (I, S, D) having the following properties:
• For every leaf node L of F , there is an operator o =
(P T, DEL, ADD) and a binding θ such that L =
(P T )θ. oθ is called the operator instance for L.
• For every non-leaf node N of F , let m = (N T, DEC, P )
be the method instance for N . Let (L1 , . . . , Lk ) be the
totally ordered list of leaf nodes that occur before N , and
let o1 , . . . , ok , respectively, be the operator instances for
these nodes. Then P is satisfied in the state produced by
starting with S and applying o1 , . . . , ok sequentially.
Two HTN domains D1 and D2 are equivalent if and
only if, for any arbitrary task list I and state of the world
S, the planning problems (I, S, D1 ) and (I, S, D2 ) have
exactly the same set of possible solution forests. For
example, let T = {N T1 (?x), N T2 (?x), P T (?x)} be a
set of two non-primitive tasks and one primitive task, let
o = (P T (?x), {}, {}) be an operator with empty add
and delete lists that achieves the primitive task P T (?x),
let m1 = (N T1 (?x), (N T2 (?x)), a(?x)) and m1 =
(N T1 (?x), (N T2 (?x)), a(?x) ∧ b(?x)) be two methods
that can decompose the non-primitive task N T1 (?x) into
N T2 (?x), and let m2 = (N T2 (?x), (P T (?x)), b(?x)) be
a method for decomposing the non-primitive task N T2 (?x)
into the primitive task P T (?x). Then the domains D1 =
(T, {m1 , m2 }, {o}) and D2 = (T, {m1 , m2 }, {o}) are
equivalent.
Inputs to the Learning Algorithm
Motivation
For supervised learning of domains (either in an actionbased or an HTN planning environment), two possible forms
of input are:
• A set of previously generated plans. These plans can be
generated in several ways (e.g., by a human expert in that
domain). The learning process consists of extracting domain information from these plans.
• A collection of plan traces, which contain not only the
correct solution for a planning problem, but also information about inferences derived and decisions made while
this plan was generated (e.g., by a human expert).
The second form of input is preferable because it will result in faster and more accurate learning; plan traces contain much more information about the domain being learned
than plans. For this reason, most previous related work has
used the second form of input. For example, in PRODIGY,
a system that uses learning techniques in an action-based
planning context, derivational traces are used in the learning process (Veloso & Carbonell 1993). These traces contain information about the planner’s internal right and wrong
decisions in addition to the final solution.
In this paper, we also use this second form of input, with
appropriate adaptations for use in an HTN-planning environment rather than an action-based planning environment. In
addition to its efficiency advantages, this form is well suited
to our other goals. Ultimately, we want to develop a learning mechanism that can be used for HICAP (Muñoz-Avila
et al. 1999), an interactive plan authoring system for HTN
plans that allows manual editing of the plans by the user.
We intend to soon develop a supervisor module on top of
HICAP that tracks a user’s edits during plan authoring. This
sequence of edits corresponds roughly to the plan traces that
we use as input to CaMeL.
In addition to the plan traces, we will assume that the input to the learning algorithm includes the incomplete version of the domain. By definition, the incomplete version
includes the operator definitions, which seems reasonable
given that operators usually denote concrete/simple actions
with obvious effects.
Definitions
We are now ready to formally define plan traces and our
inputs. A plan trace Π consists of (1) a solution to an HTN
planning problem and (2) for each internal node N in the solution forest, an incomplete version of all instances of methods that were applicable. This will obviously include the
instance of the method that was actually used to decompose
N.
The inputs for an HTN method learning algorithm consist
of:
• The incomplete version D̄ of a domain D.
• A set of n HTN planning problems {(Ij , Sj , D)}, where
1 ≤ j ≤ n.
• A plan trace Πj for each of these problems.
Outputs of the Learning Algorithm
One of the challenges in any learning algorithm is how to
define a criterion to evaluate its output. Often, there is not
enough information in the input or there are not enough
training samples to derive an optimal output. Therefore,
learning algorithms may return a set of candidate answers
instead of a single answer. This phenomenon can affect the
definition of soundness and completeness, which play a crucial role in evaluating outputs in a planning context.
We will assume that every constituent of the domains with
which we are dealing is deterministic and training samples
are not noisy. Therefore, there may be two reasons why a
complete and correct definition of a method cannot be induced:
• Lack of knowledge about the structure of the domain:
For example, suppose that a learning algorithm does
not know whether the preconditions of methods being
learned consist of only conjunctions, or whether disjunctions are also allowed. Suppose this learning algorithm is trying to learn a method m that decomposes
the task move(?t, ?s, ?d), and assume that the algorithm’s inputs include two instances of m: an instance to
decompose the task instance move(truck1 , city1 , city2 )
and the other one to decompose the task instance
move(truck2 , city3 , city4 ). Suppose also that these two
methods are applied, respectively, in the following world
states:
{truck(truck1 ), at(truck1 , city1 ), color(truck1 , blue)}
{truck(truck2 ), at(truck2 , city3 ), color(truck2 , red)}
AIPS 2002
133
If we give these two instances of m to an HTN method
learner, then both
truck(?t) ∧ at(?t, ?s)
and
truck(?t)∧at(?t, ?s)∧(color(?t, blue)∨color(?t, red))
can be preconditions for method m, and the learner has
no way to tell which one is the precondition of m if the
learner doesn’t know that only conjunctions are allowed.
• Insufficient coverage of the domain information by training samples:
Consider another example,
with the same
method as in last example, and three instances:
move(truck1 , city1 , city2 ), move(truck2 , city3 , city4 )
and move(truck3 , city5 , city6 ).
The states of the
world in which these three instances are applied are
respectively:
{truck(truck1 ), at(truck1 , city1 ), color(truck1 , blue)}
{truck(truck2 ), at(truck2 , city3 ), color(truck2 , blue)}
{truck(truck3 ), at(truck3 , city5 ), color(truck3 , red)}
Suppose that the algorithm knows the preconditions of
the methods in this specific domain contain only conjunctions. Knowing this, if the algorithm only encounters the first two examples, it will not be able to induce
that color(?t, blue) is not in the preconditions of this
method, no matter how well it works, simply because
there is not enough information in the given input to infer this. The best the algorithm can do is to say that
the precondition of this method is a generalization2 of
{truck(?t), at(?t, ?s), color(?t, blue)}. When given the
third training sample, the algorithm will be able to determine that color(?t, blue) is not part of the method’s
precondition.
In this paper, we will assume that the exact form of the
preconditions of methods for the target domain is known a
priori. Thus, the only reason that the exact method preconditions cannot be induced will be due to insufficient training.
Before we can formally present soundness and completeness definitions in the context of HTN method learning, we
need to define consistent answers:
A domain D1 is consistent with another domain D2 with
respect to a set of pairs (Ij , Sj ) of a task list Ij and a state
of the world Sj if and only if, for every j, the plan traces for
HTN planning problems (Ij , Sj , D1 ) and (Ij , Sj , D2 ) are
exactly the same. This definition says that although there
may be differences in the methods and/or operators in D1
and D2 when solving problems relative to the task list Ij
and state Sj for each j, the resulting traces are identical.
2
A conjunction C1 of logical atoms is more general than another conjunction C2 of logical atoms if and only if the set of logical atoms appearing in C1 is a subset of the set of logical atoms
appearing in C2 .
134
AIPS 2002
Using the above definition, we can now formally define
soundness and completeness for HTN method learning algorithms. In order to simplify these definitions, we will assume that output of an HTN method learner is a set of HTN
domains rather than a set of possible method preconditions.
This is a reasonable assumption because the incomplete version of the domain is given to the learning algorithm as input, and the algorithm induces method preconditions for that
domain. These preconditions are the only missing part in the
domain definition. Therefore, after inducing these preconditions, the learner can build a complete HTN domain from
the incomplete domain given as input.
The definition of soundness is as follows:
Consider an HTN method learning algorithm whose inputs are
• D̄, the incomplete version of a domain D;
• A set of HTN planning problems {(Ij , Sj , D)}, where
1 ≤ j ≤ n;
• A plan trace Πj for each of these HTN planning problems.
An HTN method learning algorithm is sound if, whenever
it returns a set of HTN domains, each of them is consistent
with D with respect to the set of all (Ij , Sj ) pairs.
Consider an HTN method learner whose inputs are the
three listed above. Then this algorithm is complete if, for
every domain D that is consistent with D with respect to
the set of all (Ij , Sj ) pairs, the algorithm’s answer includes
a domain that is equivalent to D .
Another useful notion is convergence. Intuitively, it tells
us whether an algorithm is expected to find a final answer in
finite time. An algorithm converges to the correct answer in
a domain D that satisfies our restrictions and assumptions,
if and only if it is given a finite set of plan traces for the
HTN planning problems (Ij , Sj , D) as input, and it terminates and outputs a set of HTN domains, each of which is
consistent with D with respect to the set of all possible pairs
of an initial task list and a world state. Apparently, all of
the domains in the output set of a method learner that has
already converged must be equivalent to each other.
Algorithm Implementation
Motivation
The main goal of learning HTN methods is to be able to
generate plans for new planning problems (or queries). This
ability will be obtained by learning how to plan using a set
of previously generated plans or plan traces. In the machine
learning literature, two entirely different kinds of learning,
namely lazy learning and eager learning are discussed. In
the purest form of lazy learning, training samples are simply stored. At query time, the algorithm compares the query
instance with its recorded training samples. Thus, learning
time is minimized while query time can be high, especially
if no attempt is made to prune the number of stored training samples. On the other hand, eager learners induce an
abstract concept during the training process. At query time,
this concept, rather than the training samples themselves, are
used to answer the query. Thus, learning time is higher than
for purely lazy algorithms, while query time is usually lower.
In the context of learning method preconditions, lazy
learning has been done using CBR, which involves locating those training samples that are most similar to the planning problem given as the query (Veloso, Muñoz-Avila, &
Bergmann 1996; Hanney & Keane 1996; Lenz et al. 1998).
This problem is then solved by adapting the solutions stored
in the retrieved training samples. Our focus in this paper is
on eager learning. Some of the advantages of using eager
learning in our context are:
• Less query time: Lazy learning is useful when the number of training samples and frequency of query arrival is
small. However, when these numbers are large, finding
the most similar training samples can be time consuming
(i.e., assuming that no smart indexing method is used). In
such situations, eager learners are preferable.
• Reduced knowledge base size: Once the methods are
learned, the system can discard the training samples and
use the induced methods to solve new planning problems.
In other words, the learned methods will act as a compact
summary of the training cases. In contrast, purely lazy approaches require that, for every new planning problem, all
previously seen examples must be revisited and therefore
must be stored in the algorithm’s knowledge base. Also,
although several algorithms exist for significantly reducing storage requirements for case-based classifiers, they
do not yet exist for case-based HTN planners.
• Easier plan generation: If we learn methods completely,
then the process of generating a plan for a new planning problem will be much easier. This requires inducing
methods for a hierarchical planner so that it can automatically generate plans for new planning problems. In contrast, a case-based planner must dynamically decide, for
each new problem, which stored case or combination of
cases to apply.
As mentioned earlier, HTN method learning algorithms
may not be given enough information in the training set to
derive a single exact domain as output. Therefore, the algorithm may return a set of domains. In these situations, a
policy is needed to decide which possible domains should
be output by the algorithm. Two extreme policies are:
• The minimal policy: Any possible domain is added to the
output set if and only if there is enough evidence in the
input to prove that this domain must be in the output.
• The maximal policy: Any possible domain is added to the
output set if and only if there is not enough evidence in the
input to prove that this domain must not be in the output.
For example, suppose that an HTN method learner is trying to learn the preconditions of a method m that is used to
decompose the task move(?t, ?s, ?d). Consider the following two cases:
1. Suppose the algorithm is told that there was an
instance
move(truck1 , city1 , city2 )
of
method
m that was applied when the world state was
{truck(truck1 ), at(truck1 , city1 )}. Using this training
sample (which is a positive sample, since it tells us
when a method is applicable), a minimal approach
will yield: “The method m can be applied whenever
{truck(?t) ∧ at(?t, ?s)} is true in the world state.”
However, a maximal approach will yield “Method m is
always applicable.” This is because the algorithm has no
way to prove that method m is not indeed applicable in
some cases, according to its input.
2. Suppose the algorithm is told that there was a world
state where {truck(truck1 ), at(truck1 , city2 )} was true,
but m was not applicable to decompose the task
move(truck1 , city1 , city2 ). (Recall that algorithm’s inputs are plan traces, so it knows exactly at each state
which methods are applicable to decompose a task.) If
this negative training sample is the only input to the learning algorithm, a minimal approach will answer “Method
m is never applicable” because no examples have been
given that can prove that m is applicable in some cases.
However, a maximal policy will answer with “Method
m is applicable whenever the expression ¬(truck(?t) ∧
at(?t, ?d)) is satisfied in the world state.”
The minimal policy yields a sound algorithm while the
maximal policy yields a complete algorithm. However, both
of these extreme approaches perform poorly and neither is
both sound and complete. This is because there may be possible domains whose existence in the output set cannot be
proved or disproved using the current input, simply because
there is not enough information in the input to do so and
more training samples are required. These possible domains
are discarded in the minimal view and added to the output
set in the maximal view.
One way to obtain better performance is to track the possible domains that cannot be proved or disproved so that they
can be assessed in the future, after more training samples
are acquired. Thus, we need an algorithm for tracking possible domains, while preferably maintaining its soundness
and completeness.
Candidate Elimination
Candidate elimination is a well-known machine learning algorithm introduced in (Mitchell 1977). Several extensions
of the original algorithm have been proposed (Hirsh 1994;
Sebag 1995; Hirsh, Mishra, & Pitt 1997). Candidate elimination is based on the concept of a version space, the set
of possible explanations of the concept that is being learned.
This concept is represented by two sets: a set G of maximally general possible predicates to explain the concept, and
a set S of maximally specific possible such predicates. Every concept between these two borders is a member of the
version space, and is a possible explanation of the concept
being learned. If enough training samples are given, the version space converges to a single answer (i.e., sets S and G
become equivalent). It is also possible that the version space
can collapse if the training samples are inconsistent.
In our context, using candidate elimination has two main
advantages. First, the resulting algorithm is sound and complete if our output is the set of all possible domains, where
each method’s set of preconditions can be any member of
its corresponding version space. Second, candidate elimination is an incremental algorithm: whenever the algorithm
AIPS 2002
135
acquires a new training sample, it just updates its version
spaces and discards that training sample afterwards. There
is no need to keep the training samples.
Candidate elimination is indeed a very general algorithm.
However, to apply this algorithm for a specific application, a
generalization topology (a lattice) on the set of possible concepts must be defined (i.e., the generalization/specialization
relation, along with the top and bottom of the lattice). In our
algorithm CaMel, every method has a corresponding version space, and each member of a method’s version space is
a possible precondition for that method.
CaMeL requires both negative and positive examples.
The concept of a “negative” example in a planning context
may not be clear. However, for our context, negative examples can be generated easily. In our definitions, the input to
a method learner includes plan traces, each of which lists all
applicable method instances that can be used to decompose
a task instance in a specific world state. Therefore, if other
methods can be used to decompose this task (i.e., for some
other world states), we can infer that they were not applicable in those specific world states, and can hence serve as
negative examples.
CaMeL: An HTN Method Learner Based On
Candidate Elimination
Before detailing CaMeL, we need to introduce the notion of
normalization. Suppose that an HTN method learner is trying to learn the preconditions of a method m that is used to
decompose the task move(?t, ?s, ?d). Assume that two instances of this method are given. The first instance is used
to decompose the task m1 = move(truck1 , city1 , city2 )
in the state S1 = {truck(truck1 ), at(truck1 , city1 )},
while the second instance is used to decompose the task
m2 = move(truck2 , city3 , city4 ) in the state S2 =
{truck(truck2 ), at(truck2 , city3 )}. Apparently, these two
training samples contain the same piece of information. Intuitively, it is: “You can move an object ?t from any starting
location ?s to any destination ?d if ?t is a truck and it is initially at ?s.” But how is a learning algorithm supposed to
derive such a general statement from such a specific example? This statement contains three variables, while the facts
are about specific constants such as truck1 , city1 , and city2 .
A generalization process is required that changes these constants to variables. This is roughly what happens during a
normalization process.
Consider a ground instance mθ of a method m that decomposes task t for world state S. Then, Sθ−1 is called a
normalization of S with respect to mθ, and θ−1 is called a
normalizer for S. For the above example, both the normalization of S1 with respect to m1 and the normalization of S2
with respect to m2 yield {truck(?t), at(?t, ?s)}.
The normalization process replaces constants in different
training examples that play the same role (e.g., truck1 and
truck2 ) with a variable (e.g., ?t) in order to generalize the
facts that are given as input. Fact generalization is indeed a
basic strategy in most eager learning algorithms.
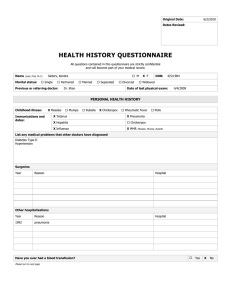
The pseudo-code of our algorithm, CaMeL, is given in
Figure 1. The algorithm subroutines are as follows:
136
AIPS 2002
Given:
D̄ = (T, M̄ , O), the incomplete version
of D = (T, M, O)
I = {I1 , . . . , In }, a set of task lists
S = {S1 , . . . , Sn }, a set of world states
Π = {Π1 , . . . , Πn }, a set of plan traces,
one per planning problem (Ii ,Si ,D)
CaMeL(D̄,I,S,Π) =
FOR each method m̄j ∈ M̄
Initialize a version space V Sj
FOR each plan trace Πi ∈ Π
FOR each method m̄j ∈ M̄
inst = LocateInstances(Πi ,m̄j )
FOR each (loc,θ,np)∈ inst
Si = ComputeState(D̄,Si ,Πi ,loc)
V Sj = CE(Normalize(Si ,θ),V Sj ,np)
IF Converged(V S1 ,...,V Sm )
RETURN all V Sj ’s
RETURN all V Sj ’s
Figure 1: The CaMeL Method-Learning Algorithm
• LocateInstances(Π,m̄), where Π is a plan trace
and m̄ = (N T, DEC) is an incomplete method, is a
function that returns a set of triples (loc, θ, np). Each
of these triples corresponds to one of the places where
an instance (N T )θ of a non-primitive task N T was decomposed in Π. loc denotes the number of operators that
occur before this instance of a task in the plan trace Π,
and np is a boolean variable indicating whether method
instance mθ was applicable to decompose (N T )θ.
• ComputeState(D̄,S,Π,loc) is a function that computes the world state after applying the first loc operators
of the plan trace Π in incomplete HTN domain D̄, where
the initial world state is S.
• CE(S,V S,np) is an implementation of the candidate
elimination algorithm on version space V S with training
sample S. np is a boolean variable that indicates whether
S is a negative or positive example.
• Converged(V S1 ,...,V Sm ) checks if the algorithm
has converged. As mentioned before, a method learning
algorithm converges to an answer when and only when
all of the members in its output set are equivalent to each
other. CaMeL uses this fact to verify whether it has converged to an answer after processing each training sample.
In the general case, this function can be extremely expensive to evaluate in practice. However, in many cases
where additional restrictions on the form of the preconditions are given, this function can be computed more
quickly.
Algorithm analysis
In this section, we will discuss the assumptions and restrictions a domain must satisfy in order for CaMeL to work correctly. We will also propose a few theorems about CaMeL
in the framework we have defined.
Two kinds of constants may appear in an HTN plan trace
Π or its corresponding HTN planning problem (I, S, D).
First, explicit constants appear explicitly in the domain definition D (e.g., in the effects of operators, argument list of
tasks, or decomposition list of methods). Second, implicit
constants are those that do not appear in the D explicitly.
These constants appear in a plan trace because some of the
variables in D were instantiated to them while the plan trace
was created.
For example, consider an HTN method m for decomposing the task go(?x, ?y) that decomposes this task to a primitive task walk(?x, ?y). The precondition of this method
is weather(good) ∧ at(?x). Now, if there are two atoms
at(home) and weather(good) in the current world state and
an instance of the method m is used to decompose the task
go(?x, ?y) to the subtask walk(home, station) in the corresponding plan trace, then the constants home and station
are implicit constants, while in the HTN domain definition,
good is an explicit constant.
As another example, in the blocks world domain, table
is an explicit constant while names of blocks are implicit
constants.
When normalization is used to generalize the training
samples, the following crucial assumption is made:
Assumption 1 No constant can be both implicit and explicit.
Another assumption should be made because we use the
candidate elimination algorithm. In order for candidate
elimination to work properly, the terms more general, more
specific, etc., must be defined for the set of possible members of the version space. CaMeL uses version spaces to
show the possible preconditions of methods, which in general can be any first order predicate calculus formula. Unfortunately, these terms cannot be defined for the set of all
possible boolean formulas in first order predicate calculus.
Assumption 2 Preconditions of the methods have a known
form, and this form is such that the relations more general,
less general, more specific, less specific, maximally general, maximally specific, minimal generalization and minimal specialization can be defined for them.
This assumption defines the learning algorithm’s representational bias. A representational bias defines the states
in the search space of a learning algorithm (Gordon & desJardins 1995). It guarantees that we can generalize given
facts about the training samples (Mitchell 1980).
Given these assumptions, the following theorems can be
proved:
Theorem 1 CaMeL is a sound and complete HTN method
learner.
Theorem 2 For any given HTN domain D that satisfies our
restrictions and assumptions, there exist a finite set of plan
traces that cause CaMeL to converge to D.
We omit the proofs here, due to lack of space. The proof
of Theorem 1 is straightforward: It proceeds by applying
the relevant theorems about version space algorithms repeatedly, once for each method to be learned. The proof of Theorem 2 is more complicated, as it has to deal with interactions
among tasks and their subtasks, sub-subtasks, and so forth.
Experiments
Theorem 2 says that there always exists a set of training samples that causes CaMeL to converge if the domain definition
satisfies our restrictions and assumptions. However, this theorem does not give us any information about the number of
training samples in such a set. What we need in practice is an
answer to the question “How many samples will be needed
to converge on average?”. In this section, we will discuss
our experiments to answer this question.
Test Domain
The domain we used is a simplified and abstracted version for planning a NEO (Noncombatant Evacuation Operation). NEOs are conducted to assist the U.S.A. Department of State with evacuating noncombatants, nonessential
military personnel, selected host-nation citizens, and third
country nationals whose lives are in danger from locations
in a host foreign nation to an appropriate safe haven. The
decision making process for a NEO is conducted at three
increasingly-specific levels: strategic, operational, and tactical. The strategic level involves global and political considerations such as whether to perform the NEO. The operational level involves considerations such as determining
the size and composition of its execution force. The tactical
level is the concrete level, which assigns specific resources
to specific tasks. This hierarchical structure makes HTNs a
natural choice for NEO planning.
Simulating a Human Expert
One goal in our work is to learn method for HTN planners in
military planning domains. These domains are usually complicated, requiring many samples to learn each method. It
is difficult to obtain these training samples for military domains. Even if we had access to the real world NEO training samples, those samples would need to be classified by
human experts and the concepts learned by CaMeL would
need to be tested by human experts to assess their correctness. This would be very expensive and time-consuming.
In order to overcome this problem, we decided to simulate a human expert. We used a correct hierarchical planner to generate planning traces for random planning problems on an HTN domain. Then we fed these plan traces to
CaMeL and observed its behavior until it converged to the
set of methods used to generate these plan traces.
The hierarchical planner we used is a slightly modified
version of SHOP (Nau et al. 1999). In SHOP, if more than
one method is applicable in some situation, the method that
appears first in the SHOP knowledge base is always chosen.
Since in our framework there is no ordering on the set of
methods, we changed this behavior so that SHOP chooses
one of the applicable methods randomly at each point. We
AIPS 2002
137
also changed the output of SHOP from a simple plan to a
plan trace.
Results
After generating the eleven sets of training samples for P =
1 2
11
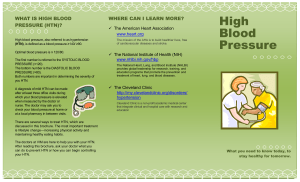
12 , 12 ,. . . , 12 , we fed each training set to CaMeL until it converged. Figure 2 shows the number of plan traces needed in
each case in order for CaMeL to converge. Figure 3 shows
the time in seconds CaMeL needed to converge in each of
those cases3 . As can be seen, the number of required plan
traces and time is minimized when the probability P of a
city having an airport is approximately 50%. For other values of P , methods are harder to learn. When P is close to
0, the hard-to-learn methods are those whose preconditions
require cities to have airports, because the cases where these
methods are applicable somewhere in given plan traces are
so rare that the learner cannot easily induce their preconditions. When P is close to 1, the hard-to-learn methods
are those whose preconditions do not require cities to have
airports: the probability that there accidentally is an airport
whenever these methods are applicable is so high that the
learner cannot induce that an airport’s presence is not indeed
required.
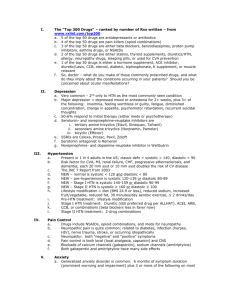
Although it takes CaMeL tens and sometimes a few hundred training samples to learn all of the methods in the domain, CaMeL learns several of the methods in the NEO domain very quickly. Figure 4 shows how many of the methods are learned completely as a function of the number of
3
5
7
9
plan traces, for the cases where P = 12
, 12
, 12
, 12
. ¿From
examining the raw data that went into this figure, we have
observed that:
1. When P is close to 50%, all methods are learned very
quickly.
2. When P is close to 0, methods whose preconditions do
not require cities to have airports are learned very quickly.
3
These experiments were conducted on a Sun Ultra 10 machine
with a 440 MHz SUNW UltraSPARC-IIi CPU and 128 megabytes
of RAM.
138
AIPS 2002
Plan Traces Needed
In order to generate each plan trace, we had to generate a
random NEO planning problem and feed it to the modified
version of SHOP. To generate a random NEO planning problem, every possible state atom was assigned a random variable, indicating whether or not it should be present in the
initial state of the world (e.g., should there be an airport in
a specific city), or what value its corresponding state atom
should have (e.g., should hostility level be hostile, neutral,
or permissive). In our preliminary experiments, we noticed
that the distribution of these random variables did not affect
our experiments very much. However, there is one exception to this rule: the probability P that there is an airport in
a city makes a lot of difference. Therefore, we decided to
assign a uniform distribution to all random variables other
than P and to perform experiments with several different
values of P . We conducted eleven sets of experiments, with
1 2
P = 12
, 12 ,. . . , 11
12 .
1000
800
600
400
200
0
1
2
Training Set
Figure 2: Number of plan traces needed to converge
45
Learning Time (Seconds)
Generating the Training Set
1200
40
35
30
25
20
15
10
5
0
1
2
Training Set
Figure 3: CPU time used by CaMeL to converge
3. When P is close to 1, methods whose preconditions require cities to have airports are learned very quickly.
We believe that these observations are quite important:
When P is close to zero, methods that do not use airports
are more likely to be used to decompose the tasks and are
therefore of more importance than the other methods. The
opposite is true when P is close to 1. In other words,
CaMeL learns the most useful methods quickly, suggesting
that CaMeL may potentially be of use in real world domains
even if only a small number of training samples are available.
Related Work
Much of the work done on the integration of learning and
planning is focused on conventional action-based planners.
Usually, this work, as formulated in (Minton 1990), is aimed
at speeding up the plan generation process or to increase
the quality of the generated plans by learning search control rules. These rules give the planner knowledge to help
it decide at choice points and include selection (i.e., rules
that recommend to use an operator in a specific situation),
rejection (i.e., rules that recommend not to use an operator
in a specific situation or avoid a world state), and preference (i.e., rules that indicate some operators are preferable
in specific situations) rules. Generally speaking, the input
18
Methods Learned
16
14
12
10
P=3/12
P=5/12
P=7/12
P=9/12
8
6
4
2
0
(x10) Plan Traces Given
Figure 4: Speed of convergence for different training sets.
The total number of methods in the domain is 17.
for this kind of learning, as mentioned in (Langley 1996),
consists of partial given knowledge of a problem-solving domain and a set of experiences with search through the problem’s search space. The idea that this set of experiences can
contain solution paths (or in our terminology, plan traces)
was suggested in (Sleeman, Langley, & Mitchell 1982). In
(Mitchell, Mahadevan, & Steinberg 1985), learning apprentices, which acquire their knowledge by observing a domain
expert solving a problem, were suggested to be used as control rule learning algorithms for the first time. ExplanationBased Learning (EBL) has been used to induce control rules
(Minton 1988). STATIC (Etzioni 1993) uses a graph representation of problem spaces to derive EBL-style control
knowledge. Kautukam and Kambhampati (Kautukam &
Kambhampati 1994), discuss the induction of explanationbased control rules in partial ordered planning. In (Leckie &
Zukerman 1998), inductive methods are used to learn search
control rules.
There has been some recent work on applying various
learning algorithms to induce task hierarchies. In (Garland,
Ryall, & Rich 2001), a technique called programming by
demonstration is used to build a system in which a domain
expert performs a task by executing actions and then reviews
and annotates a log of the actions. This information is then
used to learn hierarchical task models. KnoMic (van Lent
& Laird 1999) is a learning-by-observation system that extracts knowledge from observations of an expert performing
a task and generalizes this knowledge to a hierarchy of rules.
These rules are then used by an agent to perform the same
task.
Another aspect concerning the integration of planning and
learning is automatic domain knowledge acquisition. In this
framework, the planner does not have the full definition of
the planning domain and tries to learn this definition by experimentation. In (Gil 1992; 1994), a dynamic environment
in which the preconditions or effects of operators change
during the time is introduced and methods to derive these
preconditions and effects dynamically is discussed. In (Gil
1993), instead of revising existing operators, new operators
are acquired by direct analogy with existing operators, decomposition of monolithic operators into meaningful suboperators and experimentation with partially-specified operators.
Several systems have integrated machine learning and
planning. For example, PRODIGY (Minton et al. 1989)
is an architecture that integrates planning and learning in
its several modules (Veloso et al. 1995). SCOPE (Estlin
1998) is a system that learns domain-specific control rules
for a partial-ordered planner that improve both planning efficiency and plan quality (Estlin & Mooney 1997) and uses
both EBL and Inductive Logic Programming (ILP) techniques. SOAR (Laird, Rosenbloom, & Newell 1986) is a
general cognitive architecture for developing systems that
exhibit intelligent behavior.
Conclusion and Future Work
In this paper, we introduced CaMeL, an algorithm that integrates machine learning techniques with HTN planning. Our
ultimate goal is embedding CaMeL as a module in HICAP
to help its users in the planning process. CaMeL is supposed
to observe domain experts while they are solving instances
of HTN planning problems, and gather and generalize information on how these experts solved these problems, so
that it can assist other users in future planning problems. As
our preliminary experiments suggest, CaMeL can quickly
(i.e., with a small number of plan traces) learn the methods
that are most useful in a planning domain. This suggests
that CaMeL may potentially be useful in real-world applications, because it may be able to generate plans for many
problems even before it has fully learned all of the methods
in a domain.
CaMeL is an incremental algorithm. Therefore, even if
has not been given enough training samples in order to converge, it should be able to approximate the methods that have
not yet been fully learned. Our future work will include developing techniques to do these approximations. We also
intend to integrate CaMeL into HICAP, and conduct subject
study experiments with domain experts to obtain their judgments about the quality and validity of the generated plans.
Acknowledgments
This work was supported in part by the following grants,
contracts, and awards: Air Force Research Laboratory
F306029910013 and F30602-00-2-0505, Army Research
Laboratory DAAL0197K0135, and the University of Maryland General Research Board. Opinions expressed in this
paper are those of authors and do not necessarily reflect
opinions of the funding agencies.
References
Aha, D. W., and Breslow, L. A. 1997. Refining conversational case libraries. In Proceedings of the Second International Conference on Case-Based Reasoning, 267–278.
Providence, RI: Springer-Verlag.
Currie, K., and Tate, A. 1991. O-plan: The open planning
architecture. Artificial Intelligence 52:49–86.
AIPS 2002
139
DoD. 1994. Joint tactics, techniques and procedures for
noncombat evacuation operations. Technical Report Joint
Report 3-07.51, Second Draft, Department of Defense.
Erol, K.; Hendler, J.; and Nau, D. S. 1994. HTN planning: Complexity and expressivity. In Proceedings of
the Twelfth National Conference on Artificial Intelligence.
AAAI Press/MIT Press.
Estlin, T. A., and Mooney, R. J. 1997. Learning to improve
both efficiency and quality of planning. In Proceedings of
the Fifteenth International Joint Conference on Artificial
Intelligence, 1227–1232.
Estlin, T. 1998. Using Multi-Strategy Learning to Improve Planning Efficiency and Quality. Ph.D. Dissertation,
Department of Computer Sciences, University of Texas at
Austin.
Etzioni, O. 1993. A structural theory of explanation-based
learning. Artificial Intelligence 60:93–139.
Fikes, R. E., and Nilsson, N. J. 1971. STRIPS: A new
approach to the application of theorem proving to problem
solving. Artificial Intelligence 2:189–208.
Garland, A.; Ryall, K.; and Rich, C. 2001. Learning hierarchical task models by defining and refining examples.
In First International Conference on Knowledge Capture,
44–51.
Gil, Y. 1992. Acquiring Domain Knowledge for Planning
by Experimentation. Ph.D. Dissertation, School of Computer Science, Carnegie Mellon University, Pittsburgh, PA
15213.
Gil, Y. 1993. Learning new planning operators by exploration and experimentation. In Proceedings of the AAAI
Workshop on Learning Action Models.
Gil, Y. 1994. Learning by experimentation: Incremental
refinement of incomplete planning domains. In Proceedings of the Eleventh International Conference on Machine
Learning.
Gordon, D., and desJardins, M. 1995. Evaluation and selection of biases in machine learning. Machine Learning
20:5–22.
Hanney, K., and Keane, M. T. 1996. Learning adaptation
rules from a case-base. In Proceedings of the Third European Workshop on CBR. Lausanne, Switzerland: Springer.
Hirsh, H.; Mishra, N.; and Pitt, L. 1997. Version spaces
without boundary sets. In Proceedings of the Fourteenth
National Conference on Artificial Intelligence. AAAI
Press/MIT Press.
Hirsh, H. 1994. Generalizing version spaces. Machine
Learning 17:5–45.
Kautukam, S., and Kambhampati, S. 1994. Learning explanation-based search control rules for partial-order
planning. In Proceedings of the 12th National Conference
on Artificial Intelligence.
Laird, J. E.; Rosenbloom, P. S.; and Newell, A. 1986.
Chunking in SOAR: The anatomy of a general learning
mechanism. Machine Learning 1:11–46.
140
AIPS 2002
Lamber, K. S. 1992. Noncombatant evacuation operations:
Plan now or pay later. Technical report, Naval War College.
Langley, P. 1996. Elements of Machine Learning. San
Francisco, CA: Morgan Kaufmann Publishers.
Leckie, C., and Zukerman, I. 1998. Inductive learning
of search control rules for planning. Artificial Intelligence
101:63–98.
Lenz, M.; Bartsch-Sporl, B.; Burkhard, H. D.; and Wess,
S., eds. 1998. Case-Based Reasoning Technology: From
Foundations to Applications. Berlin: Springer.
Minton, S. N.; Knoblock, C. A.; Kuokka, D. R.; Gil, Y.;
Joseph, R. L.; and Carbonell, J. G. 1989. PRODIGY 2.0:
The manual and tutorial. Technical Report CMU-CS-89146, School of Computer Science, Carnegie Mellon University.
Minton, S. 1988. Learning effective search control knowledge: An explanation-based approach. Technical Report TR CMU-CS-88-133, School of Computer Science,
Carnegie Mellon University.
Minton, S. N. 1990. Quantitative results concerning the
utility of explanation based learning. Artificial Intelligence
42:363–391.
Mitchell, T. M.; Mahadevan, S.; and Steinberg, L. 1985.
LEAP: A learning apprentice for VLSI design. In Proceedings of the Ninth International Joint Conference on
Artificial Intelligence, 573–580. Los Angeles, CA: Morgan Kaufmann.
Mitchell, T. M. 1977. Version spaces: A candidate elimination approach to rule learning. In Proceedings of the
Fifth International Joint Conference on Artificial Intelligence, 305–310. Cambridge, MA: AAAI Press.
Mitchell, T. M. 1980. The need for biases in learning
generalizations. Technical Report CBM-TR-117, Rutgers
University.
Muñoz-Avila, H.; McFarlane, D.; Aha, D. W.; Ballas, J.;
Breslow, L. A.; and Nau, D. S. 1999. Using guidelines
to constrain interactive case-based HTN planning. In Proceedings of the Third International Conference on CaseBased Reasoning, 288–302. Providence, RI: Springer
Press.
Nau, D. S.; Cao, Y.; Lotem, A.; and Muñoz-Avila, H. 1999.
SHOP: Simple hierarchical ordered planner. In Proceedings of the Sixteenth International Joint Conference on Artificial Intelligence, 968–973. Stockholm: AAAI Press.
Sebag, M. 1995. 2nd order understandability of disjunctive
version spaces. In Workshop on Machine Learning and
Comprehensibility, IJCAI-95.
Sleeman, D.; Langley, P.; and Mitchell, T. M. 1982. Learning from solution paths: An approach to the credit assignment problem. AI Magazine 3:48–52.
van Lent, M., and Laird, J. 1999. Learning hierarchical
performance knowledge by observation. In Proceedings of
the 16th International Conference on Machine Learning,
229–238. San Francisco, CA: Morgan Kaufmann.
Veloso, M., and Carbonell, J. G. 1993. Derivational analogy in PRODIGY: Automating case acquisition, storage,
and utilization. Machine Learning 10:249–278.
Veloso, M.; Carbonell, J. G.; Pérez, A.; Borrajo, D.; Fink,
E.; and Blythe, J. 1995. Integrating planning and learning:
The PRODIGY architecture. Journal of Experimental and
Theoretical Artificial Intelligence 7:81–120.
Veloso, M.; Muñoz-Avila, H.; and Bergmann, R. 1996.
Case-based planning: selected methods and systems. AI
Communications 9:128–137.
Wilkins, D. E. 1990. Can AI planners solve practical problems? Computational Intelligence 6:232–246.
AIPS 2002
141