From: AAAI-87 Proceedings. Copyright ©1987, AAAI (www.aaai.org). All rights reserved.
Learning
and Representation
Ghan
Jeffrey C. ScM.immer*
Department
of Information
and Computer
University of California, Irvine
schlimmer@ics .uci. edu
1986).
Science
92717
First, a new method
tinuously
new method
with
to overcome
guage.
concept
limitations
After
Secondly,
the existing
refine a distributed
To remain effective without human interaction, intelligent systems must be able to adapt to their environment. One useful
form of adaptation is to incrementally form concepts from examples for the purposes of inference and problem-solving. A
number of systems have been constructed for this task, yet their
capability is limited by the language used to represent concepts.
This paper presents an extension to the concept acquisition
system STAGGER that allows it to utilize continuously valued
attributes. The combination of methods employed is able to
dynamically acquire appropriate representations, thereby minimizing the impact of initial representational bias decisions. Of
additional interest is the distinction between the computational
flavor of the learning methods, for one is similar to connectionist
approaches while the other two are of a more symbolic nature.
is added that discretizes
valued attributes.
methods
inherent
this
weight
and
STAGGER is able
in its initial concept
lan-
some related work, this pa-
per describes each of the three learning
demonstrates
that
description,
briefly describing
con-
by combining
methods
and then
their interaction.
IL
A number
utilizing
of researchers
numerically
have studied
valued information
the problem
in symbolic
of
con-
cept learning. For example, Michalski (1983) presents the
closing interval generalization rule. It specifies that if two
values are found in positive
examples,
assume that all of
the values between them will be. This mapping from continuous to discrete values is similar to the type of approach
used by Lebowitz’s
(1985) UNIMEM
values in both a generalization
which partitions
and a data-driven
real
manner.
In the first, clusters of examples formed on the basis of disConsider
the task of constructing
a concept
description
given a series of examples and non-examples.
This has
been addressed by a number of learning systems, yet many
have limited
concept
capability
language.
a subset of the numeric values present for gaps indicated
inherent
in the
by the distribution
If the language
is too
(1986)
due to inflexibility
representational
crete attributes partition a real range by implicitly grouping the values. The latter, data-driven technique searches
of real values across objects.
there will be some concepts which cannot be
The restriction imposed by the
represented or learned.
intervals,
concept
sion tree roots by interpreting
restrictive,
representation
language is necessary, though,
and
without it the learning method could do no better than
to guess randomly at the concept’s definition (Utgoff 8c
Mitchell, 1982). To all eviate this bind between flexibility
and tractability,
resentational
a system might modify the underlying
language
creasing the language
in some way or another,
to accommodate
cepts ok reducing it to improve
appropriate
concept
more possible con-
the possibility
of finding an
description.
This paper describes
acquisition
rep-
either in-
a two part extension
system called STAGGER (Schlimmer
to a concept
& &anger,
“This work was snpported by grants ONR N0001485-K-0854,
ONR
NOOO1484K-0391,
AM MDA903-85-C-0324,
and NSF ET-85-12419.
range.
Quinlan’s
ID3 sy st em forms a number of competing
centered
around potential
pairs of
splits in the real-value
ID3 then considers these intervals
as possible deci-
them as binary
valued at-
tributes.
A distinctly
different
approach for handling
numeric in-
formation is taken by Bradshaw (1985) in his speech understanding system. Instead of attempting to map the continuous information
representing
a verbal utterance
into some
set of symbolic values, his system retains a set of attribute
averages for each word concept.
Rendell’s
(1986)
PLS
family
of concept
induction
sys-
tems incorporate
both partitioning
and averaging
approaches.
In some instances concepts are represented as
“rectangles”
or value ranges, while in other cases concepts
appear to be described
in terms of their central values.
Schlimmer
511
Along
representational
lines, Utgoff
(1982)
and Mitchell
were perhaps the first to address the issue of constrictive
representational assumptions. In this and subsequent work
1986) they develop a method which explicitly
(Utgoff,
tifies shortcomings
descriptive
language.
STAGGER’S numeric
learning
ing class, for it divides
termined
number
between
of STAGGER alleviates
description
justment
belongs
ones.
Perhaps
language.
This
de-
more impor-
the three learning
the impact
occurs in a continuous
of the methods
in the partition-
real values into a dynamically
of discrete
tantly, interaction
concept
iden-
and triggers procedures for relaxing the
components
of an ill-fitting
initial
representational
ad-
and natural manner; each
assists the others while performing
its own
task.
STAGGER uses three
and represents
concepts
interacting
learning
components
as a set of weighted,
scription
pieces.
One of the learning
weights,
another
adds new Boolean
adds new pieces corresponding
symbolic
methods
deLS
adjusts the
pieces, and the third
to an aggregation
Figurewedium
ments influence
learning,
mechanism
for they exert influence on each other by changing
proceeds.
Given
a new example,
Concept
Concepts
weighted,
representation
are represented
symbolic
combination.
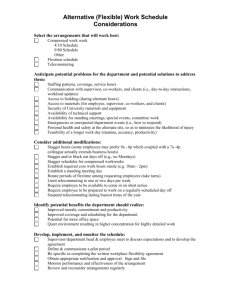
Figure 1 depicts a typical concept description
for size=medium
& color=red.
Each descriptive element is
dually weighted to capture positive and negative implication. One weight formalizes the element’s sufficiency (solid
weights
are based on the logical
ical necessity
Gaschnig,
(LN)
LS
LN
measures
=
=
A weight
(LS)
These
and log-
used in Prospector
(Duda,
.m
(1)
p(Tmatehedlexample)
p(lmatchedl-example)
greater
ness; less than one denotes
of each matching
odds(Ejfeatures)
piece and the LN weight
= odds(E)
x
LS x
Vhf
LN
(2)
V4-f
The resulting
matching
itive example
and reflects the degree of match between
concept
description
score is the odds in favor of a pos-
and the example.
This holistic
the
flavor
of matching differs from many machine learning systems in
which a single characterization
completely influences concept prediction.
.
Modif$ng
element
The weights associated
weights
with each of the concept descrip-
than one indicates
an element
in terms
that predicts
pretation.
For both, a weight of one indicates
non-
=
matched&example
1
matched&examplej/
1 examples
-examples
(31
predictive-
EN has the same range but the opposite
.
LN=
~matched&example
I
Tmatched&-example
I
examples
Texamples
inter-
irrelevance.
lTo convertodds into probability,divideodds by one plus odds.
Machine Learning & Knowledge Acquisition
examples; these counts are used to compute estimates of
the probabilities in Equation 1.
LS
and is interpreted
examples.
512
the
tion elements are easily adjusted by incrementally counting
the number of different matches between an element and
LS ranges from zero to infinity
of 0dds.l
=s- -example.
sufficiency
1979).
& Hart,
ele-
and the other represents its
(dashed line), or lmatched
necessity
concept
Following
et aI., 1979), the prior expec-
of the concept
description may be a single attribute-value pair, a range of
acceptable values for a real-valued attribute, or a Boolean
line), or matched ==sexample,
of its identity.
of each unmatched one.
and matching
Each element
description.
tation of a positive example is metered by multiplying in
in STAGGER as a set of dually-
pieces.
all of the weighted
expectation
used in (Duda
the LS weight
A.
& red concept
of real-
values into a few discrete ones. The interaction between
these methods may be viewed as a form of representational
the substrate from which induction
I.24
.m~.m~.m--.m~
Keeping counts of matchings between elements and examples also allows calculating the prior expectation
example: odds(example)
= lexamplesl/l~examplesl.
for an
By adjusting
scriptive
the weights associated
connection&
with each of the de-
STAGGER is behaving
elements,
model.
Without
hidden
as a single layer
units, these mod-
els suffer from the same representational
STAGGER does without its Boolean
limitations
that
learning method.
Both
are unable to assign weights to a combination
this severely limits the number
to only linearly-separable
ones.
point of view,
of values, and
of discoverable concepts
From a representational
the weight method
can only form concepts
in terms of existing description elements.
Instead of including an element for all possible Boolean combinations
of the attribute-values,
tively
this method
begins with the rela-
strong bias of only single attribute-value
elements.
These end-points
through
Forming
new Boolean
break up the range into discrete
pairs.
search frontier is the set of single attribute-value
The B oo 1ean method uses three search operators,
specialization,
ements
generalization,
to the search frontier.
proposing
a new element
expectation
error.
constructive
by
extends
the descriptive
process while retaining
of a limited
the
representation.
is expected
STAGGER is behaving
to be a
too inclusively, too
and thus a more specific element may be needed.
So, STAGGER expands
a new AND
the search frontier
formed
necessary for the concept.
is unmatched
ements typically
by tentatively
from two elements
The selection
ments is based on two observations:
element
search is limited
when a non-example
positive example,
generally,
adjusting
properties
For instance,
The
only when STAGGER makes an
This cautiously
power of the weight
adding
and inversion to add new el-
which are
of component
ele-
at least one necessary
in a non-example,
and necessary el-
have strong logical necessity weights.
The other type of prediction
error also triggers
Specifically,
A guess that a positive example is negative is
pansion.
overly specific. To correct for this underestimation,
search
is expanded to include a more general element; a new OR
formed from two sufficient elements is tentatively added.
Both predictive
ments.
errors are opportunities
Further details concerning
documented
Though
in (Schlimmer
the space of possible
to invert poor ele-
the Boolean
$t Granger,
method
are
Boolean
point.
is
valued at-
tributes. Therefore, STAGGER has a third learning method
which extends this space by adding discrete values for real
value ranges.
D.
Partitioning
In order
real-valued
to carve
into a set of discrete
ple statistic
intervals,
real-valued
STAGGER retains
for a number of potential’interval
a two by two
and negative
exend-
as the end points
By interpreting
attributes
The utility
these divisions
values, STAGGER maps the
of discrete
of subsequent instances into discrete
measure is similar to Equation
2, for
it involves
the prior odds of each class and a conditional
probability
ratio similar to LS and LN.
IClCZ88@.8l
U( end-point) =
p(cZass; 1 < e-p)
odds( class;) x
These conditional
probabilities
number of positive
may be computed
and negative
examples
and greater than the measured end-point.
tial end-points
is independent
(4)
p(classi 1 > e-p)
i=l
from the
with values less
Since the poten-
are taken from actual examples, the method
of scale considerations
and does not en-
tail any assumptions about the range of values. Furthermore, because partitioning
is driven by a statistic based
on class information,
the method
is able to uncover effec-
tive partitionings even when the values are uniformly distributed across all classes, something a gap finding method
(Lebowitz,
1985) is unable to do.
A straightforward
strategy for fractioning the real-value
range would be to choose the end-point with a maximal
utility
and thereby
ues: greater
divide the range into two discrete val-
and less. Rowever,
for concept learning
tasks
it would be more effective
to divide the range into a number of discrete values. So after applying
a local smoothing
the end-points
function,
STAGGER chooses
that are locally maximal.
These end-points
represent pivotal values, for Equation 4 favors those that
are predictive of concept indentity. This approach has the
advantage
that it naturally
and an effective
continuous
formed
end-points
the real-valued range, attributes
values in successive
into their discrete
sults in example
examples
counterparts.
descriptions
input requirements
ing methods
selects appropriate
number of discrete values.
may
This mapping
that are consistent
above.
Furthermore,
re-
with the
of both the weight and Boolean
described
with
be trans-
learn-
it embodies
a
type of representational
learning, because by partitioning
values into ranges, the concept description languages for
*
the other learning methods is expanded.
attributes
up an attribute’s
end-point,
A measure apphed to these numbers indicates useful
divisions in the value range.
Having aggregated
combinations
and in turn
amples with values less and greater than this potential
1986).
large, it does not include states for numerically
for each potential
which require finer distinctions,
the ex-
Each new exam-
record is kept of the number of positive
adds new elements
by beamSTAGGER selectively
searching through the space of all possible Booleans. The
initial
values.
and,
to naturally
this method transforms successive examples into a palatable form for the weight and Boolean learning methods.
real-valued
combinations
examples
the best are utilized
ple supplies a value to update these statistics,
values.
c.
are taken from processed
a beam-search,
range
a sim-
end-points.
E.
Interactions
between
STAGGER'S three learning
the learning
methods
methods
cooperatively
inter-
Schlimmer
513
BOOLEAN
LEARNING
rz
I
I
I
I
I
I
I
\
/
//
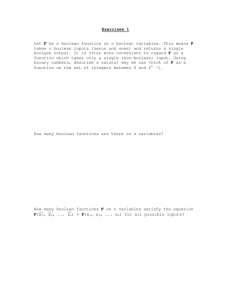
To illustrate the functioning
consider the set of potential
NUMERICAL
LEARNING
,e--
picted
piiqJFigure 2: Interaction
act as Figure
between
2 depicts.
method;
Note
that
identifies
the partitioning
5 and 15 that are used to partition
three discrete
measure
the two local maxima
near
the size attribute
into
values.
U( end-point)
25
Boolean
learning
method
base for the weight adjusting
it is restructuring
method
3.
4) clearly
STAGGER'S three methods.
The
alters the-representational
justing
in Figure
(Equation
of the partitioning
method,
end-points for this task de-
the input
so the latter
to the weight
ad-
is able to capture
the concept’s description.
The numeric learning method has this
administrative role for both the weight and Boolean learn-
ing processes;
it rewrites
the real-valued
attributes
into a
form suitable for induction
by the latter methods.
pendent
also exert influence on the rep-
learning
resentational
methods
processes which counsel them.
The de-
The Boolean
0
method draws its components from the pool of ranked elements maintained by the weight learner. The weighting
method
also provides
a weak form of feedback
meric method:
the similarity
uation function
(Equation
(Equation
attributes
2) implicitly
for the nu-
the numeric
4) and the matching
ensures that
will be amenable
IV.
between
the division
to weighting
Empirical
of real
and matching.
The interaction of the three learning methods is perhaps
best illustrated by examining their behavior on concept
learning tasks. Consider STAGGER'S acquisition of a pair
of simple object concepts.
Each object is describable in
0 and 20), its color
(one of 3 discrete values), and shape (3 discrete values).
For the first concept, an object is a positive example if
red and between 5 and 15 in size. Optimally, the size attribute
should be divided
into three ranges:
size < 5, 5 <
size < 15, and 15 < size. In each of 10 executions, STAGGER'S numeric partitioning method discovers this threeway split, and its Boolean combination
technique forms
a conjunction
combining
the middle
value of size and the
color red. The weight adjusting method further gives this
element more influence over matching than any other. The
following
is typical
of the elements
ative action of the three learning
514
formed
by the cooper-
methods.
Machine Learning & Knowledge Acquisition
10
SIZE
I
20
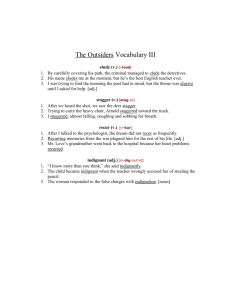
for 5.0 ssize<
15.0 & red.
equation
Performance
of its size (real value between
I
15
I
5
Figure 3: End-points
eval-
The complete,
denly.
Though
conjunctive
th e methods
element does not appear sudare not explicitly
synchro-
nized, they appear to operate in a staged manner as Figure 2 indicates. First, the numerical partitioning method
begins
to search for
ranges.
terms
1
0
a reasonable
At the same time,
way to partition
the weight
adjusting
real
method
searches for appropriate element strengths. The weight of
color=red
is adjusted at this time, but combination with
the size attribute must wait until the numerical method
settles down.
After processing about 50 examples, the
tripartite division of the size attribute is stable, and the
weight method is able to assign a strong LN weight to the
middle value of the size attribute. After this, the Boolean
method combines the size and color elements to form the
element depicted above. Weight adjusting finishes the job
by giving this element strong LS and LN values.
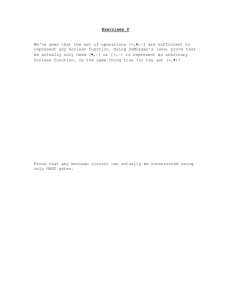
Regrettably,
these three learning methods are not sufficient for all concept learning tasks; there are some concepts
for which the numerical method is unable to uncover an effective partitioning.
For example, consider the concept of
objects that have a size between 5 and 15 or are red but not
both.
Figure 4 indicates
able to identify
limitation
that the numerical
a reasonable
partitioning
method
is un-
in this case. This
also arises if we consider the capabilities
of the
U ( end-point)
the weight method:
if a concept involves ‘an exclusive-or
of
a real-value range, STAGGER is unable to discover it.
251
Acknowledgements
Thanks to Rick Granger and Michal Young who provided
much of the early foundations
0
5
Figure 4: End-points
for this work; to Ross Quin-
Ian for his assistance in formulating the numeric learning
method; to Doug Fisher for insight on the interactions be-
20
10
15
SIZE
for 5.0 lsize<
15.0 @ red.
tween the weight, Boolean,
and to the machine
and numeric learning methods;
learning
group at UC1 for ready dis-
cussion and suggestions.
weight method used without the other methods; the weight
learner alone is only able to describe linearly-separable concepts (which
method
does not include exclusive-or).
allows it to overcome
its representational
this limitation
language.
direct the numerical method,
able to move beyond
by rewriting
If the Boolean
method
could
then the latter would also be
linearly-separable
eferences
The Boolean
concepts.
This is
an area for future study.
Bradshaw,
G.
sounds:
L. (1985).
Learning
to recognize ’speech
and model. PhD thesis, Department
A theory
of Psychology,
Carnegie-Mellon
Duda, R., Gaschnig,
J., & Hart,
in the Prospector
V.
Conclusions
ration.
and Future
University,
Pittsburgh,
PA.
In D. Michie
cro electronic
P. (1979).
consultant
age,
Model
design
system for mineral exploExpert
(Ed.),
Edinburgh:
systems
in the mi;
Edinburgh
University
Press.
This paper describes
of learning
learning
a three part approach
a concept from examples.
method
modifies
a simple concept
changing the weights associated
A second,
binations
symbolic
learning
of these descriptive
method
to overcome
third learning
set of discrete
elements
ranges,
style
description
with descriptive
method
forms
by
elements.
Boolean
com-
and allows the first
a representational
method
to the task
A connectionist
shortcoming.
divides real-valued
attributes
The
into a
so other methods
are able to conOverall, the
concepts.
struct descriptions of numerical
interaction between these three methods
is a type of co-
operative representational
learning. The numeric method
changes the bias for both the Boolean and weight method.
Similarly,
the Boolean
method
forms new compound
ments and thus increases the representational
of the weight adjusting method.
One drawback
illustrated
in the previous
ele-
capabilities
section arises
because cooperation
between the methods is incomplete.
Dynamic
feedback is lacking for the numeric method.
Though
it attempts
effective
learning
information
to form
about the progress
to alter its course of action.
method
value partitions
by the other
methods,
that
allow
it does not use
of learning
at those levels
Consequently
the numerical
can only uncover partitions
that can be utilized by
Lebowitz,
M. (1985).
generalization.
Michalski,
Categorizing
Cognitive
R. S. (1983).
ductive learning.
& T.
numeric information
Science,
A theory
and methodology
In R. S. Michalski,
M. Mitchell
Machine
(Eds.),
tificiaZ intelligence
approach.
for
9,285-308.
of in-
J. G. Carbonell,
learning:
Los Altos,
An
CA:
ar-
Morgan
Kaufmanu.
Quinlan, J. R. (1986).
Learning,
Rendell,
of decision trees. Machine
Induction
1, N-106.
L. (1986).
A g eneral framework
a study of selective
induction.
for induction
Machine
and
Learning,
I,
317-354.
Schlimmer,
J. C., & Granger,
R. H., Jr.
(1986).
mental learning from noisy data. Machine
317-354.
Utgoff, P. E., & Mitchell, T. M. (1982))
appropriate bias for inductive concept
ceedings
ligence
mann.
Utgoff,
of the National
(pp.
414-41‘7).
P. E. (1986).
Incre-
Learning,
I,
Acquisition
of
learning. Pro-
Conference
on Artificial
Intel-
Pittsburgh,
PA: Morgan
Kauf-
Shift of bias for inductive
c\oncept
learning.
In R. S. Michalski, J. G. Carbonell & T.
An artificial inM. Mitchell (Eds.), 1Mac h ine learning:
telligence
approach
(Vol.
2).
Los Altos,
CA:
Morgan
Kaufmann.
Schlimmer
515