From: AAAI-86 Proceedings. Copyright ©1986, AAAI (www.aaai.org). All rights reserved.
PLANNING
SENSORLESS
ROBOT
MANIPULATION
A. Peshkin
M.
Robotics
ABSTRACT:
used
The
physics
of motion
to plan
sensorless
robot
sliding
object’s
motion
distribution
of support
on the
forces,
in
of
a
are
approach
object
general
to the
motions
previous
construction,
spiral
of sliding
distributions
a central
about
the
performance
the
be
resulting
of
goal
frictional
goal.
based
by moving
a robot
The
optimal
on
spiral
“herding”
finger
and
discussed.
a facet
KEYWORDS:
to
Center
of
manipulation,
rotation,
sliding,
sensorless
slipping,
manipulation,
pushing,
friction,
robot,
was
supported
by the Robotics
by a grant
Institute,
from
Xerox
Carnegie-Mellon
Corporation,
and
Paul
grasp
[3]
a pushed
object.
the
acquire
objects,
orientation
grasping
can
without
and
operation
the object’s
position.
nearer
to one
jaw
will
until
the second
object
is likely
of the
a robot
both
make
jaw
and
a two-jaw
general
to the
contact
makes
to rotate.
will
both
first.
(Once
jaws
wide
any
the
come
enough
will
jaws
to
close
a sliding
sliding
into
the
phase
phase
contact
the
with
than
This
The behavior
of an object
Brost finds grasp strategies
object
into a unique
configuration
in the
uncertainty
in its initial
configuration.
Philips
Laboratories,
Briarcliff
of many
is to rotate
to slide along
a fence has
Each
push
aligns
this
conditions
and
sequence
a hinge
and
and
then
similar
operations,
for
translation,
required
are used
reduce
to zero,
counter-clockwise
results
on
to simultaneously
configuration
understand
work,
on
the
(CCW)
in both
summarized
rate
the
tasks.
instance,
strategies,
at
rotation
of
[2], and
[l] and
must
found
by
motion
bounds
one of Mani
to find
with
method
can
and
the worst
by a fence,
alignment
our
2, is to place
predicted
of these
to implement
be pushed
into
a
to the
Without
rate information
none of
manipulation
strategies
guaranteed
it is necessary
comes
in section
which
application
can produce
For
Wilson’s
case distance
before
a flat
the
fence.
be used
to
edge
The
determine
of
rate
the
distance.
2. Summary
of Analytical
Results
A sliding
object
has three degrees of freedom.
If we require
the
object
to be in contact
with another
object (a pusher),
the sliding
object
retains
expressed
center
as
two
degrees
the
coordinates
of rotation
can
be expressed
the
infinitesimal
perpendicular
of freedom,
of
(COR).
Any
as a rotation
motion
are most
in
infinitesimal
68 about
of
to the vector
which
a point
each
from
conveniently
plane
motion
some
point
the COR
the
COR,
G
of
called
of the
chosen
the
to the point
the
object
so that
object
is
Y~J
gripper,
Finding
surface
The
address:
a fence.
grasping
plate’s
the
of our
object
the COR
of a sliding
object
is complicated
by the fact that
of support
* Current
with
use of sliding
Mason’s
methods
object
worst-case
fence
in
be nearer
becomes
less important
to the faces of the jaws.
here.)
in [l].
the
uncertainty
as the
follows
in
in a typical
the object
and
and
uncertainty
instance,
and
During
both
manipulate
gripper
There
contact.
not be considered
phases is discussed
which bring the
despite substantial
case,
other,
the object,
sliding
on the table
slipping
of the object with respect
regime
during
For
to be grasped,
In the
than
to
despite
object.
opens
an object
jaw
constructively
sensing,
position
accommodate
initially
be used
To
bounds
information
operations
One
the
fence, and then
on encountering
a clever
rotation,
contribution
quantitative
a sliding
control.)
it hits
a fixed,
a stationary
work.
orientation
1. Introduction
be on
the fence.
makes
determined
(CW)
with
In [2], Mani
and Wilson
find
can orient
an object on a table
directions
of a hinge
clockwise
the above
[2].
of an object
feeder)
may
robot
when
which
occurs, and to demonstrate
planning
of manipulation
University.
under
and
demonstrated
it [3] [5].
object
against
the
of objects
with
strategy
to succeed.
Sliding
in [l]
a parts
the
manipulation
uncertainty
The
work
is flush
behavior
is the interaction
in
object
it in various
also in this
planning.
This
edge
The
The
(as
moving
of the
of the object
P.
the
fence
for
Mason
grasping,
the
by pushing
ramp
(Equivalently
considered
plate.
its
or
behaviors
until a flat
the fence.
R.
of the use of sliding
belt
fence.
possible
been
a sliding
and
example
a moving
strategies
in a decreasing
is constructed,
Another
table,
support.
a strategy
15213
slanted,
The analysis
regions
of guaranteed
sticking
themselves
to use in planning.
of discrete
which
lend
University
on
This
paper
describes
a new
motion,
which finds the set of
analysis
we consider
toward
because
and
can
Prediction
the object’s
OBJECTS
Institute
Pennsylvania
work our approach
produces
quantitative
bounds
which predicted
motions
can occur.
To illustrate
a
plan which requires
quantitative
information
for its
rate at
manipulation
disk
object
strategies.
difficult
surface,
for
results
in the definition
and slipping
behavior
Unlike
on the
is
unknown.
all
of a sliding
manipulation
SLIDING
*
and A. C. Sanderson
Carnegie-Mellon
Pittsburgh,
OF
Manor,
NY
forces
distribution
deviations
from
under
the
object
of support
flatness
may
of
the
in planar
contact
with
changes
in the distribution
substantially
be changed
surfaces.
affect
the
dramatically
Since
we
ROBOTICS
a
motion.
by tiny
wish
to
/ 1107
determine
the
distribution
under
motion
of
of support
alE possible
any
for it, our
support
object,
goal
without
is to find
knowing
the locus
the
of CORs
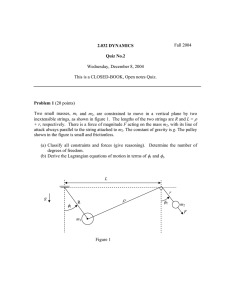
Figure
2-2 shows
values
of cv and
respect
distributions.
to the
front
The
coefficient
of friction
with
the supporting
surface
affect the motion
of the object if we use a simple
of friction.
It is also assumed
that
all motions
quasi-static
We will
mass
uppro&?autio?z.
take
(CM)
square),
we can
distance
any
consider
the
distribution
enclose
the
The
[4])
CM
The
COR
Z
motion
square
to
on
the
disk,
locus
of
useful
bounds
of the
shown
at the
the
COR
are the
the
any
point
square
COR
The
square.
are
square,
on the
be
of the
disk
must
locus
for
the
in the
that
edge
the
which
object
would
disk.
pushed
be if the object
Q, z , and
distribution
the
at
“tripod”
just
what
CM,
were
the
inscribed
point
a
might
we do not
truly
forces,
a disk.
in considering
require
The
in figure
2-l.
in which
of points
be the COR
edge
of an inscribed
inscribed
object in contact
Z is the vector
from
2-l).
to
the
point
no distribution
the
boundary
forces
on the
pusher
and
loci are denoted
object,
disk.
indicated
Our
results
can result
In
figure
2-2,
the
the
object
(p,)
is zero.
or it
with a pushing
the CM (at the
contact
forces
with
be the
by
of the COR locus is shown
the locus is the COR for some
of support
shown.
of
may
the
in bold
possible
[6] indicate
in a COR
coefficient
outside
of
These
friction
elementary
{COR}a.
disk
of contact
in the disk.
is perpendicular
are shown
of support
The
various
edge
for the real object.
are needed
shown
Similarly,
being
a corner
[6] for
c~ of the
a
Z
the
We do
not require
the point of contact
-d to be on the perimeter
of the
disk, as this would eliminate
applicability
of the results
to objects
inscribed
pushing
of support
that
the
found
angle
is indicated.
arrowhead.
The boundary
outline.
Every point within
distribution
loci
the
of the
(as in figure
of the disk)
COR
square.
also
point
center
COR
section
of pushing
of a fence
be an edge
between
maximum
could
locus
on the locus
problem
is the
edge
may
line
of the
In each
object,
and the angle CY between
the
as shown in figure 2-1. The values of
ones
of the five-sided
CM of the
a of the disk
of the
between
the pusher
and the
edge and the line of pushing,
(Y and
centered
radius
distribution
on the
provides
parameters
a disk
it.
support
support
therefore
Coulomb
model
are slow (the
being pushed to be a disk with its center of
Given
another
object of interest
(e.g. a
center.
to enclose
from
Since
not
the object
at the
big enough
(cl,) does
examples
Z .
(q,$,
for that
(Y to be such
to
vector
disk
(with
2 , as it
radius
A particularly
the support
simple
is concentrated
;;S) is indicated,
distribution
a),
along
with
of support.
-P0.
P
F.
Figure
Defining
COR
the
loci
pushing
line
2-2:
unit
force
an
force
through
of
since
CM,
0.
We
from
the
of the COR
(cos a, sin cy), we observe
symmetry
about
perpendicular
pc=
is directed
the
element
& =
axis
is directed
of motion,)
pushing
vector
have
the
point
great.
the
the
to the
that
almost
from
This
that
that
parallel
2-2(c),
of contact
distance
becomes
Note
&, (not
see in figure
maximum
locus
to
&.
the
CM
distance,
is infinite
if the pushing
force is directed
at the CM,
Mason [3]. In [6] we found a simple formula
for r . :
if the
directly
to
called
an
r
tap’
as shown
by
ttP
U2
Figur
2-l:
Parameters
of the pushing
problem.
‘tip
/
As the
CnR
line
angle
called
to 2, and
Peshkin
and Sanderson
[6] analyze
the motion
in detail.
The approach
is to minimize
the
friction
with
Analytical
distributions,
the
locus
evaluating
1108
the
surface
relations
are
for
arbitrary
found
between
an intermediate
of CORs.
/ ENGINEERING
infinitesimal
the
formulation
Boundaries
the resulting
analytical
of the
of the sliding
object
energy dissipated
by
set
called
COR
expressions.
of
the
locus
all
motions.
zero,
support
COR
Q-locus,
are
If the
found
and
by
coefficient
that
(such
construction,
COR
tip
li?ze.
a distance
loci
of the
the
we can
COR
is shown
are
of {COR}(2
tip
from
of friction
as
tip
The
u2/c
to create
sketch
(1)
K
(Y is varied,
the
we find
locations
=
line,
traces
(figure
2-3),
out
a straight
is perpendicular
the CM.
between
combine
shown
a COR
pusher
two
in
figure
sketch
for the
system
in figure
2-4.
and
of the
2-2),
comprising
with
The
non-zero
two
object
~1, is non-
elementary
and
all
tip
the
possible
friction
elementary
(II, = 0)
the
p,.
COR
line
A
loci
wwaiv which
are to be combined,
half-width
friction
of
possible
values
regions:
(1) the
the
of the
part
line
of the
line
sticking
below)
in outline.
The
2.1. Modes
cone
COR
(also
above
V=
consists
of the
(shown
is
of three
elementary
shaded),
shaded),
tan -lp
.
diitinct
COR
locus
(3) part
locus
of
intersection
{COR},+,
of {COR}a-y
(2) the part
and
The
of the
left
right
sticking
the tip line.
line
of Motion
sticking
The
of the sticking
(described
are shown
lilze is the normal
at the
point
is
slipping
no
advances.
object
of contact.
of
If the
slips
the
advances.
The
designated
three
loci, respectively.
motion
(sticking,
is not
always
motion,
the COR
sketch
Whether
can also
found
case.
their
have
in the
calculate
how
not
2-3:
rtip (CX) vs.
CY, and
construction
of the
a
the
sticking
and
modes of
but this
possible
modes
of
by constructing
Motion
can
and
motion
other
on
being
pushed
forces
pusher.
the
gross
the
between
which
on the
rotates
object
can
detail
occur
magnitude.
displacement
of
15 degrees.)
follows
in more
possible
by another
of known
bounds
motion
explained
object
object
the
Often
we wish to
of motion,
as above,
motion
to find
while
with
of
gross
wish
occurs
and
placed
on the instantaneous
some
to dealing
be
object
frictional
object
gross
we may
below,
a definite
in [7].
Our
strategy
Examples
are
in [7].
tip
Suppose
line.
the
rates,
of unknown
between
which
approach
Figure
determine
maximum
bounds
the bounds
instance,
given
can
presence
with
pusher
outlined
line,
any of the three
up) are possible,
and
of a sliding
on
concurrently
(For
up-slipping,
shown,
slipping
motions
and
bounds
the
to Gross
seen
table,
but
sticking
there
motion
[3].
instantaneous
and
of the
as
a clockwise
or a counterclockwise
mode of rotation
occurs
be determined
from the COR sketch, or by using the rules
2.2. Application
object,
We
minimum
line,
pusher
[7].
by Mason
We
right)
down-slipping,
the
the
relative
to the pusher
as motion
parts of the COR sketch described
In the example
slipping
down,
the
and
to
lies left (resp.
up)
component
of the pusher,
lies on the sticking
relative
(resp.
above
are
COR
object
COR
down
to the line of motion
If the
2,
we wish
while
to find
quantity
geometry
of
p
the
motion
relating
construct
the
the
sketch
change
to
bound
three
value
of p.
an initial
final
set of configurations
volume
strategy
of pusher
positions
dp.
We
In each
of
then
sketch
Using
from
we
that COR,
Pinitial
to
x.
requires
with
of the object
to a smaller
construction
pushed
final
volume.
of just
a point
object,
such
(which
in our
space)
is reduced
configuration
consists
the
Manipulation
dimensional
from
From
equation
dx and
for the quantity
manipulation
the set of all possible
in a quantity
,Bfinar.
differential
a
motions
for each
of interactions
of
find
Sensorless
a sensorless
is a subset
we
possible
,Binitial
COR which maximizes
dx/d/3.
differential
equation
of motion
an upper
of a sequence
that
from
instantaneous
COR
3. Planning
Planning
greatest
problem
locate the possible
we integrate
the
,Blinar, yielding
the
changes
case
Optimally
the
in configuration
space.
Manipulation
with sensory
feedback
permits
comparison
of
intermediate
states with goal states in order to modify
the control
strategy.
In sensorless
manipulation
prediction
of intermediate
states depends
on reliable
models of motion.
The models are used
to
plan
determine
in order
STICKING
MODE
For
preconditions
evolves
by matching
to constrain
planning
of
resulting
Figure
2-4:
Construction
of the COR
sketch.
down-slipping,
the
regions
of
each
of subgoals
operation,
to bounds
and
a
on motion
configurations.
strategies
of the
rotation,
and
parameters
which
determine
direction
of pushing.
Since
possible,
results
manipulation
graphical
representation
object
(i.e.
clockwise
slipping,
and
a series
mode
it
of
is useful
motion
counterclockwise
sticking),
as a
the mode:
object
in many cases more
corresponding
to
each
to
of
the
have
a
sliding
rotation,
function
of
upthe
orientation,
and
than one mode is
mode
may
ROBOTICS
overlap.
/ 1109
Brost
[I]
and
Mani
representations
of only
[2]
for
clockwise
and
the representations
sticking
have
independently
a simplified
set
of modes
counterclockwise
developed
graphica:
of motion
consisting
rotation.
can be extended
Using
to incorporate
our
move
results
the slipping
make
that
it moves
sure
One
of manipulation
to
of motion
guide
a
search
configuration
But
object.
produce
to
for
space
using
the
pusher
proposed
push.
Since
push
on every
object,
essential
is
computationally
The
both
way
which
in general
the
possible
in figure
be used
increases,
reduce
the
that
It is also
of the pushed
necessary
object
to
must
the
one
possible
initial
calculating
consider
position
the
of the
effect
of
and
quantitative
results
listed
on a tabletop,
is to enclose
a spiral
in radius,
described
Our
can be localized
by a robot
a push
in
results
the maximum
that
To
we must
does the pushing
point.
rates
4-l.
in the
of moving
angle
If as the pusher’s
the
disk
is being
down
p, called
motion
along
into
pushed
is by considering
its spiral
the
spiral;
the
parameter,
the collision
progresses
/3
localization
is
p decreases,
is failing.
be
section
2
allow
us
to
must
the
I
not
4-l:
Geometry
at the
collision
of pusher
moment
and disk.
of
the
second
decreases
of the spiral.
this
of the spiral
Figure
The
of the disk
center
optimize
rate
sensing.
position
As the spiral
towards
convergence
the object
without
initial
finger.
is to be pushed
quantitative
constraint
4-l).
spiral,
effect
of a Disk
the set of possible
executed
the disk
choosing
than
faster
(figure
the
above.
Localization
to slide
within
path
into
pushed
of sensorless
manipulation
strategies
are analyzed
in 161 and 171, using the results
summarized
above (section
2). In
this section we describe
an unusual
robot motion
by which a. disk,
free
its
be pushed
succeeding.
But if as the pusher’s
motion
progresses
the disk is being pushed out of the spiral; localization
examples
approach
along
will
down
of comparing
or decrease
can
strategy.
response
of the requirements
4. Spiral
Several
that
disk
inexpensive.
qualitative
fulfill
first,
understanding
motions
manipulation
quantitative
of a proposed
it
requires,
This
volume
of the possible
positions
of the pushed
only the set of modes,
it is not possible
to
a guaranteed
understand
any
strategies
be understood.
continues
the
increase
modes
it
that
and
modes.
Design
as
down,
guarantee
strategy
subject
CENTER
by
OF SPIRAL
(PC1
to the
escape.
4.2.
If the disk
radius
b,,
is known
init,ially
we begin
by
b,.
radius
Then
Ab
amount
we reduce
with
each
describes
a spiral.
radius a), bumping
center
revolution,
disk
may
the
radius
so
bounded
pusher
pusher’s
revolution,
If the
spiral
that
is shrinking
out of the spiral
be bumped
and so the disk
in some
a point-like
area of
in a circle
of turning
the
of
by an
pusher’s
motion
Eventually
the spiral will intersect
the disk (of
it. We wish the disk to be bumped
toward
the
so that it will be bumped
again on the pusher’s
of the spiral,
next
to be located
moving
will
be lost
too
instead
fast,
however,
of toward
the
its center,
Critical Case: Pusher Chasing the Disk around a
Circular Path
In the critical
case the angle p does not change with advance
of the
pusher.
The
pushei’s
motion
pusher,
and
path followed
must
the
the
(Ab will
find
the
be a function
the
disk
of the present
number
of revolutions
to some
radius
of 6, called
bm, below
localization,
regardless
spiral
which
b, with
which
radius.)
will
be required
a < b <b,,
it will
not
of the number
We also wish
be possible
to
to the critical
value
guarantee
succeeding.)
of revolutions.
Since
the
the
pushing
previous
current
revolution,
at most
Ab from
will
consider
from
the edge
only
point
has
revolution
the
the
had
pusher
edge
case,
made
radius
must
of the
the worst
is the full
just
contact
disk,
the
as shown
where
the
the
Ab greater
only
contact
with
disk
motion
not
sufficient
(rather
1110
that
If the
than
/
to assure
out
that
the
of the spiral),
ENGINEERING
disk
move
will
because
downward
be pushed
the
pushing
into
point
falls
to the
critical
The
circle,
pushed
out of the pusher
circle.
of
case,
the
line
tangent
to
through
FY? and
motion
of
CM.
critical
line,
motion
of CM be tangent
in order
that
right
of the
critical
4-3 we have
constructed
COR
falls
while
in the left
if the
COR
line divides
zone,
falls
the
disk
in the
right
line,
outside
pusher
the
the
(i.e.
the plane
into
two
is pushed
into
the
zone,
the
disk
is
We
pusher
This
In figure
is
the spiral
will
line
of CM,
drawn
to the
the
pusher
4-1.
[3].
line,
on the
along
COR
is failing.)
if the
parameter
will
fall
the
Ab.
if Ab < a the disk
The
path
path of CM.
/?.
To make
left of the critical
We know
must
zones:
at a distance
of the
motion
labeled
critical
disk.
than
in figure
distance
line
The
diverges
from the critical path of CA! by moving
Therefore
p will decrease
with advance
of the
arc.
localization
Analysis
Suppose
is unstable.
If the COR falls to the left of the critical
line, the CM diverges
from the critical path of CM by moving
inside the arc. Therefore
localization
is
p will increase
with
advance
of the pusher
(i.e.
CM
4.1.
the
perpendicular
disk
instantaneous
4-2,
disk (labeled
critical path of CM)
figure:
an arc of a circle, concentric
with
Instantaneously,
the direction
of motion of
in the
path of CM.
of the
in figure
an arc of a circle, labeled
To maintain
the critical
to
to localize
and the limiting
COR
shown
as
at PC.
CM of the
is by construction
The
the
centered
by the
arc path of pusher.
CM must be along
CM,
We wish
to find
the maximum
shrinkage
Ab consistent
with
guaranteeing
that the disk is bumped
into the spiral,
and not out.
case,
is shown
be as shown
the crilicul
and not localized.
critical
also
motion
figure
endpoint
(PC)
shows
that
line, we need
below the
the
sure
marginal
of the sticking
the
only
lower endpoint
case
locus.
COR
the whole
where
place
sketch
COR
the center
of the
FC
with
collision
locus falls to the
sticking
is exactly
of the pusher
locus.
at
the
The
lower
CFVl’ICAL PATH
OFCM
I
i
PATH OF
Figure
4-2:
Critical
case:
around
pusher
a circular
“chasing”
disk
path.
/
0.1
0.2
0.3
collwon
Figure
4-4:
Inverse
of the
radius
r*(B) as a function
radius
r still results
in guaranteed
pusher’s
distance
from the top edge
0.4
parameter
of the
0.5
Cbela/pd
critical
circle
of collision
parameter
,B/rr
localization.
of the disk,
In terms
of the
d, (figure 4-3), we
can use .the relationship
d
a (1 - sin p) =
to define
r.
the
disk
for
guaranteed
4.4.
Figure
4-3:
4.3.
Critical
For
every
distance
the
COR sketch
for critical
for location
of PC.
Radius
value
from
sticking
vs. Collision
of ,B, (the
the
pusher’s
locus.
This
collision
line
defines
case,
and
solution
of motion
a critical
to the
lower
radius
the
endpoint
r*(p).
For
of
each
collision
parameter
p, r*(p) is the radius of the tightest
circle that
the pusher
can describe
with the guarantee
that the disk will be
pushed
function
The
into the circle.
In
of collision
parameter
inverse
representing
of
the
figure
4-4, a / r*(p)
,8 for each of several
the
function
smallest
value
r*(p)
will
of j3 for which
be
Radius
cannot
boo the
radius
we compute
which
approached,
out
of
grazing
d *(r ) as a function
of
pusher from the top edge of
of radius
r still results
in
so
for Localization
boo of the
radius
be
motion
guaranteed,
must
collisions
the
spiral,
analytically
we
must
spiral
then
become
become
the distance
from
grazing
parameter
p, we have ,B +
shown
from
d’is t ante of the
a pusher
motion
is a limiting
localization
parameter),
distance
largest
localization.
Limiting
If there
Parameter
critical
the
d *(r ) is the
(2)
circular.
grazing
motion
as the
below
spiral
which
approaches
Ab --+ 0 as bw is
collisions,
and
we have
d --+ 0.
(In terms
of the collision
7r/2.)
If the disk is not to be bumped
have
bw = r*(a=s/2).
bco can
be
to be
is plotted
as a
values of ~1,.
denoted
a pusher
p*(r ),
motion
of
boo =
a(p,+l)
ba
2 a
=
for
for pe 5
pc 2
1
(3)
1
ROBOTICS
/
1111
see that only
We
localized
if pLc= 0 can
to within
Otherwise
the
is given
a circle
tightest
circle
by equation
a disk
the
be localized
same
within
radius
which
completely,
as that
the disk
i.e.
of the
disk.
5. Conclusion
1Ve
have
can be localized
object,
3.
and
the
4.5.
Computing
the Fastest
Let bn be the radius
have
initially
We define
Guaranteed
of the nth revolution
b,, and
radius
Spiral
bm is the
limiting
in the
table,
basis
without
of the pusher,
so that
radius
shown
instantaneous
we
as n -+ CO.
bounds
presence
of unknown
and between
for planning
sensors.
a disk was
of a sliding
can
of a sliding
be
placed
object
being
frictional
on
the
pushed
forces
As an example
a sensorless
taking
advantage
possible
by another
between
object
and pusher.
These bounds
manipulation
of sliding
objects
developed
and optimized.
object is now sufficiently
robot strategies
and verified.
recursively
how
motions
strategy
object
provide
with
or
for localizing
We believe that the motion
well understood
that reliable
of sliding
motion
can be designed
bn= b,ml-d *(b,)
The
difference
n-1
and
that
on the
value
between
4-5
number
of consecutive
shows
the
of turns
numerically
for
of spiral
of the
U.
spiral
the condition
the
critical
bn.
bn above
radius
and on linear scales.
The spiral
radius
was
.25, using
p,=
equation
turns
enforces
of d is exactly
of radius
deviation
b, = 100
4 thus
value
motion
n, on logarithmic
with
4-4, and
the
pushing
(arbitrarily)
figure
radii
revolution,
nth
for circular
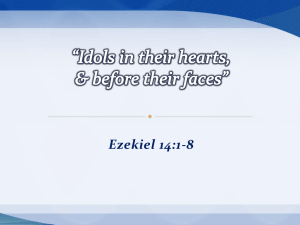
Figure
the
n, is Ab = d *(btl). Equation
the
results
for
spiral
radius
is
bm, vs.
We start
computed
p*(r)
shown
References
in
4.
1.
4-5 shows that
Figure
the
disk
radius
reduce
the
a
when
(which
radius
the
is taken
of the
spiral
to
As the limiting
radius
is approached,
more and more slowly,
approaching
about
n
-1.6
, where
be
by almost
n is the number
large comparedto
1 in the
figure),
a with
each
we can
Brost,
Randy.
Uncertainty.
strategy
4-5 demonstrates
the
best
the spiral
reduces
its radius
the limiting
radius
bm a+s
Automation,
2.
April,
Mani,
Murali
Orienting
3.
of revolutions.
performance
that
the
“herding”
can achieve.
4.
and Wilson,
6.
i
c
10.00:
Mason,
7.
T.
I<., Paul,
examples.
Peshkin,
Robotics
0
;
p
0.10:
3
0.01:
o.oo_._
1
10
Localization
1112
T. and
3rd Int’l
Peshkin,
W. R. D.
Parts.
on Robotics
of
and
Sanderson,
R.
A. C.
1985.
and
1985.
Pushing.
Research,
Programmable
AI Lab,
XIII,
Robot Hands
Press,
of Quasi-static
on Robotics
Stanford
M. A. and
The MIT
On the Scope
R., Bolles,
NAMRII
J. I<..
Salisbury,
Symp.
Film,
A Programmable
Proceedings,
of Manipulation.
Matthew
Pingle,
Sliding
1.00:
Figure
in the Presence
Conf.
October,
1985.
Assembly,
three
1974.
The Motion
of a Pushed,
Sliding
Object (Part 1: Sliding
Friction).
CMU-RI-TR-85-18,
Robotics
Institute,
Carnegie-Mellon
University,
1985.
E
=
B
3
for Flat
Matthew
Proceedings,
6.
:
Planning
Int’l
1986.
System
Mason,
short
s
6
e
oi
.s
.Z
Grasp
IEEE
revolution.
the Mechanics
Figure
Automatic
Proceedings,
4-6:
Deviation
localization
revolutions
I ENGINEERING
of unit
of
disk,
100
Spiral
for mu = .25
spiral
radius
from
radius,
vs. number
completed.
revolulrons
IOW
(log scale)
ultimate
of spiral
Object
M. A. and
(Part
Institute,
Sanderson,
2: Contact
Carnegie-Mellon
A. C.
Friction).
The Motion
of a Pushed,
CMU-RI-TR-86-7,
University,
1986.