Differential equation and solution aka Pure and Warping Torsion
advertisement

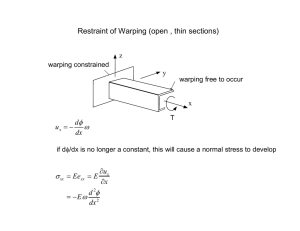
Differential equation and solution aka Pure and Warping Torsion aka Free and Restrained Warping ref: Hughes 6.1 (eqn 6.1.18) the development of warping torsion up to this point was assumed to be "pure" or "free" i.e. it was the only effect on a beam and it's behavior was unrestrained. this led us to state φ'' and φ''' were constant. the development of St. Venant's torsion in 13.10 was developed the same way, φ' constant. we will now address the situation where boundary conditions may affect one or both of these effects. combined torsional resistance determined by: St_V Mx = Mx St_V Mx w + Mx is St. Venant's torsion = G⋅ KT⋅φ' w = −E⋅Iωω⋅φ''' M x is warping torsion M x is internal or external concentrated torque Tω (1) M x = G⋅ KT⋅φ' − E⋅ Iωω⋅φ''' uniform (distributed) torque mx (torque per unit length) is related to Mx equilibrium element => −mx = d M x => dx differentiating (1) => mx = E⋅ Iωω⋅φ''' − G⋅ KT⋅φ'' (2) solution of (1) has homogeneous and particular solution. rewriting: φ''' − G⋅ KT E⋅ Iωω homogeneous => ⋅φ' = −M x 2 let λ = E⋅ Iωω 2 φ''' − λ ⋅φ' = 0 G⋅ KT E⋅ Iωω assume solution φH := e m⋅xx ( 3 ) 2 2 2d 2 3 2 3 φ − λ ⋅ φH → m ⋅exp(m⋅x) − λ ⋅m⋅exp(m⋅x) => m − λ ⋅m = m⋅ m − λ = 0 3 H dx dx d 1 notes_16_pure_&_warping_torsion.mcd roots m := 0 m := λ 0 homogeneous solution => φH := c ⋅e + c ⋅e 1 3 2d 3 φP − λ ⋅ dx dx λ ⋅x x 2 particular solution assume φP := A ⋅x x d m := −λ λ + c ⋅e − λ ⋅x 2 G⋅ KT φ''' − E⋅ Iωω ⋅φ' = −M x E⋅ Iωω Mx 2 φP → −λ ⋅A is a solution <=> A := 2 2 −λ ⋅A → λ ⋅E⋅IIωω therefore: φ( x) := c + c ⋅e 1 λ ⋅x 2 + c ⋅e − λ ⋅x 2 Mx + E⋅ Iωω which can be rewritten as ⋅x 2 −M x λ ⋅E⋅IIωω φ(x) := A + B⋅cosh( λ⋅x) + C⋅sinh( λ⋅x) + Mx ⋅x 2 λ ⋅E⋅Iωω similarly equation (2) => φ homogeneous => 4 IV 2 − λ ⋅φ'' = mx E⋅ Iωω 2 assume solution φH := e − λ ⋅φ'' = 0 2 d2 2 4 2 φ → m2 ⋅exp(m2⋅x) − λ ⋅m2 ⋅exp(m2⋅x) 2 H d φH − λ ⋅ 4 dx φ IV m2⋅xx 4 2 2 => m2 − λ ⋅m2 = 0 dx roots m2 := 0 m2 := 0 m2 := λ 0 homogeneous solution => (double root) m2 := −λ λ 0 φH := c ⋅e + c ⋅x⋅e + c ⋅e 1 2 2 3 λ ⋅x + c ⋅e − λ ⋅x 4 3 particular solution assume φP := A1⋅x + B⋅ Bx 4 d 4 dx 2 d2 2 φ → −λ ⋅(2⋅ A1 + 6⋅ B⋅x) 2 P φP − λ ⋅ 2 dx −λ ⋅(2⋅ A1 + 6⋅ B⋅x) = mx is a solution <=> B := 0 and A1 := E⋅ Iωω −mx 2 2⋅λ ⋅E⋅IIωω 2 notes_16_pure_&_warping_torsion.mcd φP := −mx 2 2 4 ⋅x x d 4 2⋅λ ⋅E⋅Iωω dx mx 2 d2 φ → 2 P E⋅ Iωω dx check φP − λ ⋅ therefore: φH := c + c ⋅x + c ⋅e 1 2 λ ⋅x 3 + c ⋅e − λ ⋅x 4 − mx 2 2 ⋅x which can be rewritten as 2⋅λ ⋅E⋅IIωω φ( x) := A + B⋅x + C⋅cosh( λ⋅x) + D⋅sinh( λ⋅x) − mx 2 2 ⋅x 2⋅λ ⋅E⋅Iωω boundary conditions for various situations: fixed end φ=0 no twist φ' = 0 no slope pinned end φ=0 no twist Bi = 0 free warping free end Bi = 0 free warping φ''' = 0 no warping shear no twist φl' = φr' Bil = Bir continuous φl' = φr' Bil = Bir continuous continuous supports φ = 0 transition point within span general φ l = φr φ'' = 0 free end from bending for a visual of Bi the bimoment see figure 6.13 in text 3 notes_16_pure_&_warping_torsion.mcd Problem - Torsional response of Cantilever Girder general solution for end moment Mx and fixed at x = 0 (cantilever) Vy=5000 lb φ = φ' = 0 x=0 φ( 0) → A+ B=0 2 2 C⋅λ + 2 λ ⋅E⋅ Iωω 2 or ... substituting λ = ⋅x λ ⋅E⋅ Iωω Mx simplify 2 Mx φ' = 0 → C⋅λ + collect , C Mx λ ⋅E⋅Iωω λ ⋅E⋅ Iωω d φ( x) φ_pr(x) → C⋅cosh( λ⋅x) ⋅λ + φ_pr( x) := φ dx φ_pr( 0) x φ(x) := A + B⋅cosh( λ⋅x) + C⋅sinh( λ⋅x) + from restrained_torsion.mcd Mx Mx L φ'' := 0 x=L 1/2 in Vy=5000 lb Mx =0 2 λ ⋅E⋅Iωω G⋅ KT C⋅λ + E⋅ Iωω Mx G⋅ KT =0 free end => φ'' = 0 φ_db_pr( x) := 2 d 2 φ x) φ( dx φ_db_pr(x) → C⋅sinh( λ⋅x) ⋅λ φ_db_pr(L) → C⋅sinh( λ⋅L) ⋅λ or ..... Given A+ B=0 2 B⋅cosh( λ⋅L) ⋅λ + C⋅sinh( λ⋅L) ⋅λ = 0 2 2 2 B + C⋅tanh( λ⋅L) = 0 C⋅λ + −Mx ⋅tanh( λ⋅L) λ⋅G⋅ KT M x ⋅tanh( λ⋅L) Find(A, B , C) → λ⋅G⋅ KT −M x λ⋅G⋅ KT 4 Mx G⋅ KT =0 B + C⋅tanh( λ⋅L) = 0 notes_16_pure_&_warping_torsion.mcd Mx B := λ⋅G⋅K KT ⋅tanh( λ⋅L) A := −B B Mx (λ⋅x) + φ(x) := A + B⋅cosh( λ⋅x) + C⋅sinh C −M x C := λ⋅G⋅K KT ⋅x 2 λ ⋅E⋅Iωω −M x φ( x) → λ⋅G⋅ KT ⋅tanh( λ⋅L) + Mx λ⋅G⋅ KT ⋅tanh( λ⋅L) ⋅cosh( λ⋅x) − Mx λ⋅G⋅ KT ⋅sinh( λ⋅x) + Mx 2 ⋅x λ ⋅E⋅ Iωω substituting for A, B, C, and λ^2 Mx φ( x) := λ⋅G⋅K KT ⋅tanh( λ⋅L) ⋅ ( cosh( λ⋅x) − 1) − φ( x) := Mx λ⋅G⋅KT Mx λ⋅G⋅K KT ⋅sinh( λ⋅x) + Mx ⋅x G⋅ KT ⋅ tanh( λ⋅L) ⋅ ( cosh( λ⋅x) − 1) − sinh( λ⋅x) + λ⋅x Mx d φ( x) collect , λ → ⋅ ( tanh( λ⋅L) ⋅sinh( λ⋅x) − cosh( λ⋅x) + 1) G⋅ KT dx φ_pr( x) := 2 d 2 φ( x) collect , λ → dx Mx G⋅ KT Mx G⋅ KT ⋅ ( tanh( λ⋅L) ⋅cosh( λ⋅x) − sinh( λ⋅x)) ⋅λ φ_db_pr( x) := 3 d 3 dx φ( x) collect , λ → ⋅ ( tanh( λ λ⋅L) ⋅sinh( λ⋅x) − cosh( λ⋅x) + 1) Mx G⋅ KT M x⋅λ G⋅K KT ⋅ ( tanh( λ⋅L) ⋅cosh( λ⋅x) − sinh( λ⋅x)) ⋅ ( tanh( λ⋅L) ⋅sinh( λ⋅x) − cosh( λ⋅x)) ⋅λ φ_tr_pr( x) := let's look at these in general 2 λ = 5 M x⋅λ 2 2 G⋅K KT ⋅ ( tanh( λ⋅L) ⋅sinh( λ⋅x) − cosh( λ⋅x)) G⋅ KT E⋅ Iωω notes_16_pure_&_warping_torsion.mcd 2 < λ⋅L < 5 L := 1 λ := 5 λ⋅L = 5 F0(x) , F1( x) , F2( x) , F3( x) x := 0, 0.1 .. L above equations factoring out Mx , φ(x) ~ total twist ( ) ( ( ) ) ( ) F0(x) := tanh λ⋅L ⋅ cosh λ⋅x − 1 − sinh λ⋅x + λ⋅x G⋅ KT⋅λ Mx , φ'(x) ~ St V torsion ( ) ( ) ( ) F1(x) := tanh λ⋅L ⋅sinh λ⋅x − cosh λ⋅x + 1 G⋅ KT M x⋅λ , φ''(x) ~ axial stress warping torsion ( ) ( ) ( ) F2(x) := tanh λ⋅L ⋅cosh λ⋅x − sinh λ⋅x G⋅ KT M x⋅λ F3(x) := tanh( λ⋅L) ⋅sinh( λ⋅x) − cosh( λ⋅x) 2 G⋅ KT , φ'''(x) ~ shear stress warping torsion respectively 5 4 F0( x) 3 F1( x) F2( x) F3( x) 2 1 0 1 0 0.2 0.4 0.6 0.8 x total twist St. V torsion axial stress - warping torsion shear stress - warping torsion 6 L notes_16_pure_&_warping_torsion.mcd