φ ω Restraint of Warping (open , thin sections) d u
advertisement
 d u")
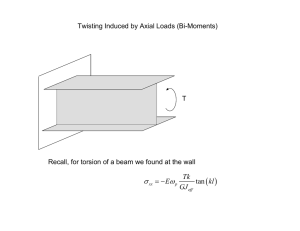
Restraint of Warping (open , thin sections) z warping constrained y warping free to occur x T dφ ux = − ω dx if dφ/dx is no longer a constant, this will cause a normal stress to develop σ xx = Eexx = E d 2φ = −E ω 2 dx ∂ux ∂x this normal stress must not produce any axial force or bending moments ∫ σ xx dA = Eφ ′′ ∫ ω dA = 0 A A ∫ yσ xx dA = Eφ ′′ ∫ yω dA = 0 A A ∫ zσ xx dA = E φ ′′ ∫ zω dA = 0 A A which says that the sectorial area function must be a principal sectorial area function and we have d 2φ σ xx = −E ω p 2 dx σ xx = 0 Note: these stresses are self-equilibrated but they do not rapidly decay from the ends ( thus, they violate Saint Venant's principle) However, a changing axial stress will require that additional shear flows be developed (recall how we obtained the VQ/It expression for shear stress in bending) ∑F x =0 ⎛ ⎛ ∂q ⎞ ∂σ xx ⎞ ⎜ σ xx + dx ⎟ tds − σ xx tds + ⎜ q(s) + ds⎟ dx − q(s)dx = 0 ⎝ ⎠ ⎝ ∂x ∂s ⎠ ∂σ ∂q = −t xx ∂s ∂x d 3φ d 2β = E 3 t ωp = E 2 t ωp dx dx β = φ′ = dφ dx integrating gives d βs q(s) = E 2 ∫ ω p tds dx 0 2 d β = E 2 ∫ ω p dA dx 2 which is the shear flow due to restraint of warping. The torque associated with this shear flow is s =s f Tq = ∫ r⊥ q ds s =0 sf = ∫ q dω p 0 Thus, the total torque is T = TSV + Tq sf = GJeff β + ∫ q dω p 0 Integration by parts lets us express this in the form ⎛ ∂q ⎞ T = GJeff β + qω p s= 0 − ∫ ω p ⎜ ⎟ ds ⎝ ∂s ⎠ 0 s= s f sf d 2β = GJeff β − E 2 ∫ ω 2p dA dx A and defining Jω = ∫ ω 2p dA A gives where d2 β T 2 2 − k β = − k dx 2 GJeff GJeff k = EJω 2 differential equation for β(x) If the torque T = constant, solution is β = C sinh(kx) + D cosh(kx) + T GJeff C, D are constants. We need to find these from the boundary conditions Fixed end: β =0 Unconstrained end: ( ux = 0 ) dβ =0 dx ( σxx = 0 ) z y x L β x= 0 = 0 dβ dx which gives ⇒ D=− =0 ⇒ C= x= L β= T T GJeff T tanh (kL) GJeff T [tanh(kL)sinh(kx ) − cosh(kx) + 1] GJ eff β= dφ T = ⎡⎣ tanh ( kL ) sinh ( kx ) − cosh ( kx ) + 1⎤⎦ dx GJ eff To get the twist we must integrate, using the additional boundary condition φ(0) = 0. We obtain at x = L L φ (L) = ∫ β dx = 0 TL GJ eff ⎡ tanh (kL) ⎤ ⎢⎣1 − kL ⎦⎥ The axial stress in the bar is σ xx = −E ω p dβ Tk = −E ω p [tanh(kL)cosh(kx) − sinh(kx)] dx GJ eff which is a maximum at the fixed end σ xx x = 0 Tk = − Eω p tanh(kL) GJeff varies along the section Problem: Explain how d2 β T 2 2 − k β = − k dx 2 GJeff can be used to solve this problem for φ = φ(x) : T1 T2 x a T = T1 − T2 0<x<a b T β = β1 = A sinh ( kx ) + B cosh ( kx ) + a<x<a+b T1 − T2 GJ eff T = −T2 β = β 2 = C sinh ( kx ) + D cosh ( kx ) − T2 GJ eff To find A, B, C, D β1 ( 0 ) = 0 ( ux = 0) d β2 ( a + b ) =0 dx (σxx = 0) solve for A,B,C,D β1 ( a ) = β 2 ( a ) (continuity of ux ) d β1 ( a ) d β 2 ( a ) = dx dx (continuity of σxx ) in 0 < x < a, integrate to get twist φ = φ1 = ∫ β1dx + C1 in a < x < a + b integrate to get twist φ = φ2 = ∫ β 2 dx + C2 Find C1 , C2 from φ1 ( 0 ) = 0 φ1 ( a ) = φ2 ( a )