Summary: Compensator design using the Root Locus; State Space K
advertisement

Summary: Compensator design using the Root Locus; State Space
controller /
R(s) +
Gc (s)
−
plant
Gp (s)
Proportional (P)
C(s)
K
/ compensator
H(s)
(usually, H(s) = 1).
K(s + z)
Gc (s)
2.0
generic system block diagram with
controller/compensator and feedback
1.8
Proportional-Integral (PI)
purpose: to improve the system’s dynamics
by proper choice of the controller TF and gain
K
Open—Loop TF: KGp (s)Gc (s)H(s) Closed—Loop TF:
KGp (s)Gc (s)
1 + KGp (s)Gc (s)H(s)
1.6
1.4
s+z
c(t)
sensor /
/ transducer
Proportional-Derivative (PD)
choice of
compensators
Ideal integral
compensated
1.2
1.0
0.8
s
Uncompensated
0.6
0.4
0.2
… and others that we haven’t
seen: PID, lead, lag, lead-lag
0
0
5
10
15
20
Time (Seconds)
Figure by MIT OpenCourseWare.
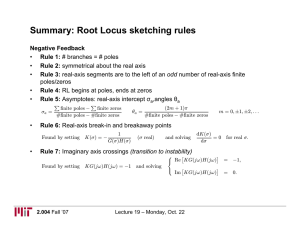
σa =
•
P
P
finite poles −
finite zeros
#finite poles − #finite zeros
(2m + 1)π
#finite poles − #finite zeros
m = 0, ±1, ±2, . . .
Rule 6: Real-axis break-in and breakaway points
Found by setting
•
θa =
K(σ) = −
1
G(σ)H(σ)
(σ real)
and solving
Rule 7: Imaginary axis crossings (transition to ⎧
instability)
£
Found by setting
KG(jω)H(jω) = −1
2.004 Fall ’07
and solving
dK(σ)
=0
dσ
⎨ Re KG(jω)H(jω)
⎩
¤
£
¤
Im KG(jω)H(jω)
for real σ.
=
−1,
=
0.
Lecture 26 – Wednesday, Nov. 7
What is Root Locus?
RL: locations on the s-plane
where the closed-loop poles move
as we vary the
feedback gain K
open-loop
poles/zeros
jω ≡ jIm {s}
Root Locus sketching rules (negative feedback)
•
Rule 1: # branches = # open-loop poles
•
Rule 2: symmetrical about the real axis
•
Rule 3: real-axis segments are to the left of an odd number of real-axis finite
open-loop poles/zeros
•
Rule 4: RL begins at open-loop poles (K=0), ends at open-loop zeros (K=∞)
•
Rule 5: Asymptotes: real-axis intercept σa, angles θa
origin
s=0
σ ≡ Re {s}
#1
Summary: Compensator design using the Root Locus; State Space
s on the RL ⇒ 1 + KGc (s)Gp (s)H(s) = 0 ⇒ KGc (s)Gp (s)H(s) = −1
2
½
|KGc (s)Gp (s)H(s)| = 1
lz l
⇒
p2 θp2
θp1
6 {KGc (s)Gp (s)H(s)} = (2m + 1) π
θz
⎧
1
⎪
⎪
−p2
p1 = 0
⎨ K=
sums taken over
|G
(s)G
(s)H(s)|
c
p
Open
Loop zeros/poles
⇒
⎪
⎪
P
⎩ P6
(s + z) − 6 (s + p) = (2m + 1)π
−2
l p1
jω ≡ jIm {s}
open-loop
poles/zeros
−z
−4
s-space geometry and transient characteristics
σ ≡ Re {s}
jω
Here, Open Loop poles are p1 = 0, −p2 = −2, Open Loop zero is −z = −4.
Geometrical interpretation of the amplitude and phase contributions to s:
2
+ jωn 1 − ζ = jωd
X
ωn
s-plane
θ
lp1 = |s + p1 | = |s| ;
θp1 = 6 (s + p1 ) = 6 s;
lp2 = |s + p2 | = |s + 2| ;
θp2 = 6 (s + p2 ) = 6 (s + 2) ;
lz = |s + z| = |s + 4| ;
θz = 6 (s + z) = 6 (s + 4) .
Since the point s shown as crimson block belongs to the Root Locus,
⎧
lp1 lp2
|s| |s + 2|
⎪
⎪ K=
=
⎨
|s + 4|
lz
⇒
⎪
⎪
⎩ 6
(s + 4) − 6 s − 6 (s + 2) = θz − θp1 − θp2 = −π
The crimson block is at s = −2 + j2 on the Root Locus. Using geometry,
√
√
lp1 = |s| = 2 2;
lp2 = |s + 2| = 2;
lz = |s + 4| = 2 2
θp1 = 6 s = 3π/4; θp2 = 6 (s + 2) = π/2; θz = 6 (s + 4) = π/4.
We can see that indeed the angular contributions add up as
θz − θp1 − θp2 = −π,
¢ ¡ √ ¢
¡ √
while the amplitude contributions give K = 2 2 × 2 / 2 2 ⇒ K = 2.
2.004 Fall ’07
ωn2
.
s2 + 2ζωn s + ωn2
• Settling time
TF =
σ
− ζ ωn = − σ d
• Damped osc. frequency
2
− jωn 1 − ζ = −jωd
X
Ts ≈ 4/(ζωn );
ωd =
1 − ζ 2 ωn
• Overshoot %OS
Ã
!
p
ζπ
1 − ζ2
%OS = exp − p
tan θ =
ζ
1 − ζ2
Figure by MIT OpenCourseWare.
cos θ = ζ
p
State Space & Phase Space
From the Equation of Motion to the State—Space representation:
µ ¶
µ ¶
x
q1
mẍ(t)+bẋ(t)+kx(t) = w(t) →
≡ q(t) =
state, y(t) ≡ ẋ(t) output
ẋ
q2
¶µ ¶ µ ¶
µ ¶
µ ¶ µ
0
1
q1
0
q1
q̇1
=
+
w(t); y(t) = (0 1)
≡ cq.
⇒ q̇(t) =
−k/m −b/m
1
q̇2
q2
q2
µ
¶
2
0
1
Solution to the state equations:
A=
−k/m −b/m
sq̂(s) = Aq̂(s) + bW (s) ⇒
1
µ ¶
0
b=
−1
q̂(s) = (sI − A) bW (s).
1
Lecture 26 – Wednesday, Nov. 7
q
t
q
Y (s) = cq̂(s) = c (sI − A)
−1
bW (s).
#2