Lecture Notes No. 2
advertisement

2.160 Identification, Estimation, and Learning
Lecture Notes No. 2
February 13, 2006
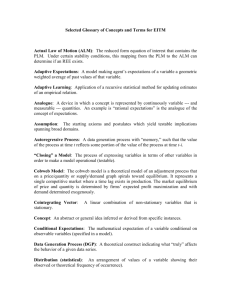
2. Parameter Estimation for Deterministic Systems
2.1 Least Squares Estimation
u1
u2
M
um
Deterministic
System
w/parameter θ
M
y
Linearly parameterized model
y = b1u1 + b2 u2 + K + bm um
Input-output
Parameters to estimate: θ = [b1 K bm ]T ∈ R m
Observations: ϕ = [u1 K um ]T ∈ R m
y = ϕ Tθ
(1)
The problem is to find the parameters θ = [b1 K bm ]T from observation data:
ϕ (1), y (1)
ϕ ( 2), y (2)
→θ
M
ϕ ( N ), y ( N )
The system may be
a linear dynamic system, e.g.
y (t ) = b1u (t − 1) + b2 u (t − 2) + ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ + bm u(t − m )
ϕ (t ) = [u(t − 1), u(
t − 2),⋅ ⋅ ⋅, u(t − m )]T ∈ R m
or a nonlinear dynamic system, e.g. y (t ) = b1u (t − 1) + b2 u (t − 2)u (t − 1)
ϕ (t ) = [u(t − 1), u(t − 2)u(t − 1)]T
Note that the parameters, b1, b2, are linearly involved in the input-output equation.
Using an estimated parameter vector θˆ , we can write a predictor that predicts the output
from inputs:
yˆ(t θ ) = ϕ (t ) T θˆ
(2)
1
We evaluate the predictor’s performance by the squared error given by
1 N
VN (θ ) = ∑ ( yˆ (t | θ ) − y (t ))2
N t =1
Problem: Find the parameter vector θˆ that minimizes the squared error:
θˆ = arg min V (θ )
(3)
(4)
N
θ
Differentiating VN (θ ) and setting it to zero,
dVN (θ )
=0
dθ
2
N
N
∑ (ϕ
T
(t)θ − y (t ))ϕ (t) = 0
(5)
t=1
N
N
T
(
ϕ
(t)
ϕ
(t)
θ
=
y (t )ϕ (t)
∑
∑
t =1
t=1
(6)
=
ΦΦ T
Consider m × N matrix
Φ = [ϕ (1) ϕ (2) K ϕ ( N )]
m≤N
(7)
If vectors ϕ (1) ϕ (2) K ϕ (N ) span the whole m-dimensional vector space
rank Φ = m ; full rank
If there are m linearly independent (column) vectors in this matrix Φ ,
rankΦ = m ; full rank
rankΦ = rankΦΦ T = m ; full rank, hence invertible
Under this condition, the optimal parameter vector is given by
θˆ = PB
(8)
N
∑ (ϕ (t)ϕ
where P =
T
t =1
(t))
−1
= (ΦΦ T )
−1
(9)
N
B = ∑ y ( t )ϕ (t)
(10)
t=1
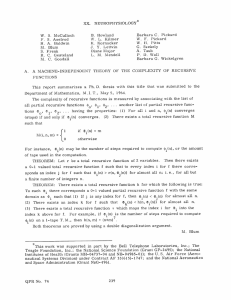
2.2 The Recursive Least-Squares Algorithm
While the above algorithm is for batch processing of whole data, we often need to
estimate parameters in real-time where data are coming from a dynamical system.
2
A recursive algorithm for computing the parameters is a powerful tool in such
applications.
u(t)
θˆ = PB : Batch Processing
y(t)
Actual
System
On-Line Estimation
Based on {y(t), ϕ (t) } the latest
data
We update the estimate θˆ
Model
y (t ) = ϕ (t) T θ
Recursive Formula
• Simple enough to
complete within a given
sampling period
• No need to store the whole
observed data θˆ
θˆ
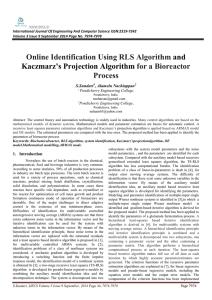
(t) = Pt Bt
Bt −1
Bt
Pt −1
Pt
θˆ(t − 1)
θˆ(t )
t=t-1
t=t
θˆ = PB
N
P = ∑ (ϕ (t)ϕ T (t))
t=1
−1
= (ΦΦ T )
−1
N
P −1 = ∑ (ϕ (t)ϕ T (t)) = (ΦΦ T )
t=1
3
N
B = ∑ y ( t )ϕ (t )
t =1
Three steps for obtaining a recursive computation algorithm
a) Splitting Bt and Pt
From (10)
t
t −1
i =1
i =1
Bt = ∑ y (i )ϕ (i ) = ∑ y (i )ϕ (i ) + y ( t )ϕ (t )
Bt = Bt −1 + y ( t )ϕ (t )
(11)
From (11)
Pt
−1
t
= ∑ (ϕ (i )ϕ T (i ))
i =1
Pt
−1
−1
= Pt −1 + ϕ (t )ϕ T (t )
(12)
b) The Matrix Inversion Lemma (An Intuitive Method)
Premultiplying Pt and postmultiplying Pt-1 to (12)yield
−1
−1
Pt Pt Pt −1 = Pt Pt −1 Pt −1 + Ptϕ (t )ϕ T ( t ) Pt −1
Pt −1 = Pt + Ptϕ (t )ϕ T (t ) Pt −1
(13)
Postmultiplying ϕ (t )
Pt −1ϕ (t ) = Ptϕ (t ) + Ptϕ (t )ϕ T (t )
Pt −1ϕ (t ) = Ptϕ (t )(1 + ϕ T (t ) Pt −1ϕ (t ) )
Ptϕ (t ) =
Pt −1ϕ (t )
(1 + ϕ T (t ) Pt −1ϕ (t ))
Postmultiplying ϕ T (t ) Pt −1
Ptϕ (t )ϕ T (t ) Pt −1 =
Pt −1ϕ (t )ϕ T (t ) Pt −1
(1 + ϕ T (t ) Pt −1ϕ (t ))
(18)
Pt −1 − Pt
Therefore,
Pt −1ϕ (t )ϕ T (t ) Pt −1
(1 + ϕ T (t ) Pt −1ϕ (t ))
Note that no matrix inversion is needed for updating Pt!
This is a special case of the Matrix Inversion Lemma.
Pt = Pt −1 −
[A + BCD]−1 = A−1 − A−1 B[DA−1 B + C −1 ]−1 DA−1
(14)
(15)
4
Exercise 1 Prove (15) and use (15) to obtain (14) from (12)
c) Reducing θˆ(t ) = Pt Bt
to the following recursive form:
(16)
T
ˆ
ˆ
ˆ
y (t ) − ϕ (t )θ (t − 1)
θ (t ) = θ (t − 1) + Κ t 1
4442444
3
Pr ediction Error
(17)
A type of gain for correcting the error From (16) θˆ(t ) = Pt Bt θˆ
(t − 1) = Pt −1 Bt −1
θˆ(t ) − θˆ(t − 1) = P B − P B
t
t
t −1
t −1
P ϕ (t )ϕ T (t )
Pt −1
= Pt −1 − t −1 T
(1 + ϕ (t ) Pt −1ϕ (t ))
(Bt −1 + y(t )ϕ (t )) − Pt −1Bt −1
P ϕ (t )ϕ T (t )
Pt −1
= Pt −1 y (t )ϕ (t ) − t −1 T
(1 + ϕ (t ) Pt −1ϕ (t )) (Bt −1 + y(t )ϕ (t ))
Pt −1 y (t )ϕ (t )(1 + ϕ T (t ) Pt −1ϕ (t ) ) − Pt −1ϕ (t )ϕ T (t ) Pt −1ϕ (t ) y (t ) − Pt −1ϕ (t )ϕ T (t ) Pt −1 Bt −1
(1 + ϕ T (t ) Pt −1ϕ (t ))
P y (t )ϕ (t ) − P ϕ (t )ϕ T (t )θˆ(t − 1)
=−
=
=
t −1
(1 + ϕ
t −1
T
(t ) Pt −1ϕ (t ) )
[
Pt −1ϕ (t )
y (t ) − ϕ T (t )θˆ(t − 1)
T
(1 + ϕ (t ) Pt −1ϕ (t ))
]
Replacing this by Κ t ∈ R m×1 , we obtain (17)
The Recursive Least Squares (RLS) Algorithm
θˆ(t ) = θˆ(t − 1) +
Pt = Pt −1 −
(
Pt −1ϕ (t )
y (t ) − ϕ T (t )θˆ(t − 1)
T
(1 + ϕ (t ) Pt −1ϕ (t ))
)
(18)
Pt −1ϕ (t )ϕ T (t ) Pt −1
(1 + ϕ T (t ) Pt −1ϕ (t )) t=1,2,… w/initial conditions
(14)
with
θˆ(0) : arbitrary
Po: positive definite matrix
This Recursive Least Squares Algorithm was originally developed by
Gauss (1777 – 1855)
5