Document 13663011

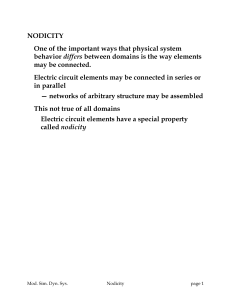
Contact instability
• Problem:
– Contact and interaction with objects couples their dynamics into the manipulator control system
– This change may cause instability
• Example:
– integral-action motion controller
– coupling to more mass evokes instability
– Impedance control affords a solution:
• Make the manipulator impedance behave like a passive physical system
Hogan, N. (1988) On the Stability of Manipulators Performing Contact
Tasks,
IEEE Journal of Robotics and Automation, 4: 677-686.
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 1
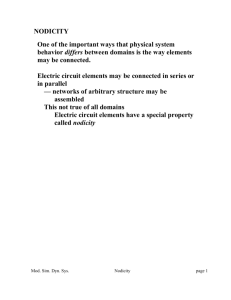
Example: Integral-action motion controller
•
• System:
– Mass restrained by linear spring & damper, driven by control actuator & external force
• Controller:
– Integral of trajectory error
System + controller:
• Isolated stability:
– Stability requires upper bound on controller gain
Mod. Sim. Dyn. Sys.
(ms x
2 +
= u ms bs
2 +
+ c k) bs
x
+ k
= cu f u = g
(r − x) s
(ms 3 + bs 2 + ks + cg) x = x
= r ms 3 + bs cg
2 + ks + cg bk cm
> g s: Laplace variable x: displacement variable f: external force variable u: control input variable r: reference input variable m: mass constant b: damping constant k: stiffness constant c: actuator force constant g: controller gain constant
Interaction Stability Neville Hogan page 2
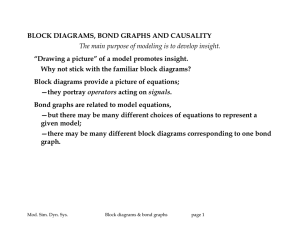
• Object mass:
• Coupled system:
Example (continued) f = m e s 2 x m e
: object mass constant
[(m + m e
)s 3 + bs 2 + ks + cg] x = cgr x
= r (m + m )s 3 cg
+ bs 2 + ks + cg bk > cg(m + m ) • Coupled stability:
• Choose any positive controller gain that will ensure isolated stability: bk cm
> g
• That controlled system is destabilized by coupling to a sufficiently large mass m e
> bk
− m cg
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 3
Problem & approach
• Problem:
– Find conditions to avoid instability due to contact & interaction
• Approach:
– Design the manipulator controller to impose a desired interaction-port behavior
– Describe the manipulator and its controller as an equivalent physical system
– Find an (equivalent) physical behavior that will avoid contact/coupled instability
• Use our knowledge of physical system behavior and how it is constrained
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 4
General object dynamics
• Assume:
– Lagrangian dynamics
– Passive
– Stable in isolation
• Legendre transform:
– Kinetic co-energy to kinetic energy
– Lagrangian form to Hamiltonian form
• Hamiltonian = total system energy
H e
( p e
, q e
) = E k
( p e
, q e
) + E p
( q e
)
L
( q e
, q e
) = E * k
( q e
, q e
) − E p
( q e
) d ⎛ ∂ L ⎞ dt ⎝
⎜⎜ ∂ q e
⎟⎟
⎠
−
∂
∂ q
L e
=
P e
−
D e
( q e
, q e
) p e
= ∂ L ∂ q e
E k
( p e
, q
= ∂ E * k e
) = p t e q e
− E
∂ q e
* k
( q e
, q e
)
H e
( p e
, q e
) = p t e q e
− L
( q e
, q e
) q e
= ∂ H e p e
= − ∂ H e
∂ p e
∂ q e
−
D e
+
P e q e
: (generalized) coordinates
L: Lagrangian
E
E k
* p
: kinetic co-energy
: potential energy
D e
P e
H e
: dissipative (generalized) forces
: exogenous (generalized) forces
: Hamiltonian
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 5
Sir William Rowan Hamilton
• William Rowan Hamilton
– Born 1805, Dublin, Ireland
– Knighted 1835
– First Foreign Associate elected to
U.S. National Academy of Sciences
– Died 1865
• Accomplishments
– Optics
– Dynamics
– Quaternions
– Linear operators
– Graph theory
– …and more
– http://www.maths.tcd.ie/pub/
HistMath/People/Hamilton/
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 6
Passivity
• Basic idea: system cannot supply power indefinitely
– Many alternative definitions, the best are energy-based
• Wyatt et al. (1981)
Wyatt, J. L., Chua, L. O., Gannett, J. W.,
• Passive: total system energy is lower-bounded
Göknar, I. C. and Green, D. N. (1981)
Energy Concepts in the State-Space Theory of Nonlinear n-Ports: Part I — Passivity.
– More precisely, available energy is lower-bounded IEEE Transactions on Circuits and Systems,
Vol. CAS-28, No. 1, pp. 48-61.
• Power flux may be positive or negative
• Convention: power positive in
– Power in (positive)—no limit
– Power out (negative)—only until stored energy exhausted
• You can store as much energy as you want but you can withdraw only what was initially stored (a finite amount)
• Passivity ≠ stability
– Example:
• Interaction between oppositely charged beads, one fixed, on free to move on a wire
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 7
Stability
• Stability:
– Convergence to equilibrium
• Use Lyapunov’s second method
– A generalization of energy-based analysis
– Lyapunov function: positive-definite non-decreasing state function
– Sufficient condition for asymptotic stability: Negative semi-definitive rate of change of Lyapunov function
• For physical systems total energy may be a useful candidate Lyapunov function
– Equilibria are at an energy minima
– Dissipation ⇒ energy reduction ⇒ convergence to equilibrium
– Hamiltonian form describes dynamics in terms of total energy
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 8
Steady state & equilibrium
• Steady state:
– Kinetic energy is a positive-definite non-decreasing function of generalized momentum
• Assume:
– Dissipative (internal) forces vanish in steady-state
• Rules out static (Coulomb) friction
– Potential energy is a positivedefinite non-decreasing function of generalized displacement
• Steady-state is a unique equilibrium configuration
• Steady state is equilibrium at the origin of the state space { p e
, q e
} q e
∂ E k
=
0
= ∂ H e
∂ p e
=
0
∂
⇒ p e p e
= ∂
=
E
0 k
∂ p e p e
=
0
= − ∂ H
Assume
D e
(
0
, e q
∂ q e
−
D e
) =
0 e
+
P e
Isolated ⇒
P e
=
0
∂ H e
∂ q e p e
=
0
=
∂ E
∂ q k e p e
=
0
+
∂ E
∂ q p e
∂ E
∂ q k e
∂ E p p e
=
0
∂ q e
=
0
∴
∂ H e
∂ q e p e
=
0
=
0
⇒ q e
=
0
=
∂ E
∂ q p e
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 9
Notation
• Represent partial derivatives using subscripts
• H is a scalar
– the Hamiltonian state function
• H eq is a vector
– Partial derivatives of the Hamiltonian w.r.t. each element of q e
•
H ep is a vector
– Partial derivatives of the Hamiltonian w.r.t. each element of p e
H eq
=
H ep
=
∂ H e
∂ q e
∂ H
∂ p e e q e
=
H p e
= −
H ep
( p e
, q eq
( p e
) e , q e
)
−
D e
( p e , q e
)
+
P e
Mod. Sim. Dyn. Sys. Interaction Stability Neville Hogan page 10
Isolated stability
• Use the Hamiltonian as a Lyapunov function
– Positive-definite non-decreasing function of state
– Rate of change of stored energy = power in – power dissipated
• Sufficient condition for asymptotic stability:
– Dissipative generalized forces are a positive-definite function of generalized momentum
• Dissipation may vanish if p e
=
0 and system is not at equilibrium
• But e
=
0 does not describe any system trajectory
– LaSalle-Lefshetz theorem
– Energy decreases on all nonequilibrium system trajectories dH e dH e dt =
H t eq q e
+
H t p dt = t
H H ep
+
H dH e dt = q t
P
− q t e
D e t ep
(
−
H eq
−
D e
+
P e
)
Isolated ⇒
P e
=
0
∴ dH e dt = − q t e
D e q t e
D e
> 0 ⇒ dH e dt < 0 ∀ p e
≠
0
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 11
Physical system interaction
• Interaction of general dynamic systems
– Many possibilities: cascade, parallel, feedback…
• Two linear systems:
• Cascade coupling equations:
• Combination: y y
1
2
= G
= G
1
2
( s s
) u
1 u
2
• Interaction of physical systems y
3 u
2
= y
2
= y
1 u
1
G
= u
3 y
3
3
= G
( )
=
3
( s
G
)
2 u
3
( )
G
1
( )
– If u i
– G i and y i are power conjugates are impedances or admittances
– Power-continuous connection:
• Power into coupled system must equal net power into component systems u
3 y
3
= u
1 y
1
+ u y
•
Not power-continuous y
3 u
3
≠ y
2 u
2
+ y u
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 12
Interaction port
• Assume coupling occurs at a set of points on the object
X e
– This defines an interaction port
–
X e is as a function of generalized coordinates q e
X e
=
L e
( q e
)
– Generalized velocity determines V e port velocity
– Port force determines generalized P e force
=
J e
( q e
) q
=
J t e
( q e
)
F e e
• These relations are always welldefined
– Guaranteed by the definition of generalized coordinates
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 13
Simple impedance
• Target (ideal) behavior of manipulator F z
=
K
(
X z
−
X o
) +
B
(
V z
)
– Elastic and viscous behavior
• In Hamiltonian form:
– Hamiltonian = potential energy p z
=
H q z
=
V z zq
( ) +
B
(
V z
−
V o
) q
H z z
=
X q z z
( )
=
−
X o
∫
K
( ) d q z
– Assume V o
= 0 for stability analysis F z
= p z
– Isolated:
V z
– Sufficient condition for isolated
• Unconstrained mass in Hamiltonian form
=
0 or
F z asymptotic stability:
=
0
– Hamiltonian = kinetic energy
– Arbitrarily small mass
B t q z
> 0
V o
F z
=
V z
=
0
⇒ q z
= constant ⇒
F z
=
0
⇒
H zq
= −
B
∴ dH z
∀
V z
≠
0 q e
=
H ep
( )
H p e
=
F e
V e
= q e e
( p e
) = 1 t
M
− 1 p e
= constant dt =
H t zq q z
= −
B t q z
• Couple these with common velocity
V e
=
V z
F e t
V e
+
F t z
V z
=
0
Mod. Sim. Dyn. Sys. Interaction Stability Neville Hogan page 14
Mass coupled to simple impedance
• Hamiltonian form
– Total energy = sum of components
H p e q z t
( p e
, q z
) = H e
( p e
) + H z
( q z
)
= −
H
=
H tq
( )
− tp
( )
B
(
H tp
( p e
) )
• Assume positive-definite, nondecreasing potential energy
– Equilibrium at ( p e
, q z
) = (
0
,
0
)
• Rate of change of Hamiltonian: dH t dt =
H t tp p e
+
H t tq q z dH t dt = −
H t tp
H tq
−
H t tp
B
+
H t tq
H tp
= − q t z
B
• Sufficient condition for asymptotic q t z
B
> 0 stability
– And because mass is unconstrained, stability is global
∀ p e
≠
0
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 15
General object coupled to simple impedance
• Total Hamiltonian (energy) is sum H of components
H t
( p e
, q t
( p e
, q e e
) =
)
=
H e
(
( p
E k p e e
,
, q e q e
) + H
( q
)
)
+ E z z p
( q e
)
+ H z
(
L e
( q e
• Assume
)
−
X o
)
– Both systems at equilibrium
– Interaction port positions coincide at coupling dH t dt =
H t zq
J e
H ep
+
H H ep
−
H H eq • Total energy is a positive-definite, non-decreasing state function −
H t ep
D e
−
H t
J t
H zq
−
H t
J t
B
• Rate of change of energy: dH t dt = − q t e
D e
− q t z
B
• The previous conditions sufficient for stability of
– Object in isolation
– Simple impedance coupled to arbitrarily small mass
• …ensure global asymptotic coupled stability
– Energy decreases on all non-equilibrium state trajectories
– True for objects of arbitrary dynamic order
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 16
Simple impedance controller implementation
• Robot model:
– Inertial mechanism, statically balanced (or zero gravity), effortcontrolled actuators
• Hamiltonian = kinetic energy q m
=
H mp
H m
= 1
2 p t m
I
− 1
( q m
) p m p m
= −
H mq
−
D m
+
P a
+
J t m
F m
V m
X m
=
J m q m
=
L m
( q m
)
• Controller:
– Transform simple impedance to manipulator configuration space
P a
= −
J t m
{
K
(
L m
( q m
) −
X o
) −
B
(
J m q m
)}
• Controller coupled to robot:
– Same structure as a physical system with Hamiltonian H c
H c
= H m
+ H z
Mod. Sim. Dyn. Sys.
q m
=
H cp p m
= −
H cq
−
D m
−
J t m
B
+
J t m
F m
V m
X m
=
J m q m
=
L m
( q m
) q m
: generalized coordinates
(configuration variables) p m
: generalized momenta
H m
: Hamiltonian
I
: inertia
D m
P a
: dissipative (generalized) forces
: actuator (generalized) forces
X m
, V m
, F m
: interaction port position, velocity, force
L m
, J m
: kinematic equations, Jacobian
Interaction Stability Neville Hogan page 17
Simple impedance controller isolated stability
• Rate of change of Hamiltonian: dH c dt =
H H cp
−
H H cq
−
H t cp
D m
• Energy decreases on all nonequilibrium trajectories if
−
H
– System is isolated
F m
=
0 dH
– Dissipative forces are positivedefinite q t m
D m
> 0 ,
V t m
B
> 0 ∀ p m
≠
0
F m c t cp
J t m
B
+
H t cp
J t m
F m dt = − q t m
D m
=
0
⇒ dH c
−
V t m
B
+
V t m
F m dt = − q t m
D m
−
V t m
B
• Minimum energy is at q z
=
0
,
X m
– But this may not define a unique manipulator configuration
=
X o
– Hamiltonian is a positive-definite non-decreasing function of q z usually not of configuration q but m
• Interaction-port impedance may not control internal degrees of freedom
– Could add terms to controller but for simplicity…
• Assume:
– Non-redundant mechanism
– Non-singular Jacobian
• Then
– Hamiltonian is positive-definite & non-decreasing in a region about q m
=
L
− 1
(
X o
)
•
Local asymptotic stability
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 18
Simple impedance controller coupled stability
• Coupling kinematics q t
= q t
( q m
, q e
)
– Coupling relates q m to q e but no need to solve explicitly
– Total Hamiltonian (energy) is sum H t of components
= H e
( p e
, q e
) + H c
( p m
, q m
)
• Rate of change of Hamiltonian dH t dt =
H H ep
+
H
+
H H cp
+
H t cp
(
−
H t ep cq
(
−
H eq
−
D e
−
D m
−
J t m
B
+
J t e
F e
+
J t m
F m
) dH
) dH t t dt = − q t e
D e
+ q t t e
J F
− q t m
(
D m
+
J t m
B
)
+ q t m
J t
F dt = − q t e
D e
+
V t e
F e
− q t m
D m
−
V t m
B
+
V t m
F m
• Coupling cannot generate power V e t
F e
+
V t m
F m
= 0
∴ dH t dt = − q t e
D e
− q t m
D m
−
V t m
B
• The previous conditions sufficient for stability of
– Object in isolation
– Simple impedance controlled robot
• …ensure local asymptotic coupled stability
Mod. Sim. Dyn. Sys. Interaction Stability Neville Hogan page 19
Kinematic errors
• Assume controller and interaction port kinematics differ
– configuration to a point
~
X
– Corresponding potential function is positive-definite, non-decreasing in a region about q m
=
L
− 1
(
X o
)
• Assume self-consistent controller kinematics
– the (erroneous) Jacobian is the correct derivative of the
(erroneous) kinematics
P a
= −
~
J t
{
K
( ~
L
( q m
) −
X o
)
−
B
( ~
J q m
)}
~
X
=
~
L
( q m
) ≠
L m
( q m
)
H z
( q m
) = H z
( q z
) = H z
( ~
L
( q m
) −
X o
)
∂ d
~
~
∂ q dt m
=
=
V
~
= ( q m
) q m z dt =
H t zq
∂
~
L
∂ q m q m
=
H t zq
~
J q m
= t zq
~
H V
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 20
Kinematic errors (continued)
• Hamiltonian of this controller coupled to the robot
– Hamiltonian state equations
– Rate of change of the Hamiltonian
– In isolation
~ c
~ c
(
( p m
, q p m
, q m m
)
) = H
= H m m
(
( p p m m
,
, q q m
) + H m
) + H z z
( q
(
~ z
~
L
( q
) m
) −
X o
) q m
=
H mp p m
= −
H mq
−
D m
−
~
J t
H zq
−
~
J t
B
+
J t m
F m
+
F
~
H m c
~ c dt t mp dt
(
−
=
=
H mq
−
D m
H
− q t zq
~
J H mp
=
0
⇒
~ t m c
D m dt
−
~
B
=
+
−
~
J t
H
V
−
H t q t m t mq
+
D zq
H
J m mp
− t m
−
~
J
F m
~
V t t
B
B
+
J t m
F m
)
• Previous conditions on
D m sufficient for isolated local
&
B are asymptotic stability
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 21
Insensitivity to kinematic errors
• The same conditions are also sufficient to ensure local asymptotic coupled stability
~ t
= E
– Coupled system Hamiltonian and H its rate of change: m dH t
• Stability properties are insensitive
( p m k
( p e
, q
, q m
)
+ e
)
H
+ z
(
E
~
L
( p
( q e q m
)
)
− dt = − q t e
D e
− q t m
D m
+
X
~ o
)
−
V t
B to kinematic errors
– Provided they are self-consistent
• Note that these results do not require small kinematic errors
– Could arise when contact occurs at unexpected locations
– e.g., on the robot links rather than the end-point
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 22
Parallel & feedback connections
• Power continuity
• Parallel connection equations
• Power balance
—OK
• Feedback connection equations
• Power balance
—OK y
3 u
3
= y
2 u
2
+ y u y
3
= ± y
2
± y
1 u
3
= u
2
= u
1 y u = ± y u ± y u y
3
= y
1
= u
2 u
1
= u
3
− y
2 u
1 1
= u y − y u
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 23
Summary remarks
• Interaction stability
– The above results can be extended
• Neutrally stable objects
• Kinematic constraints
– no dynamics
• Interface dynamics
– e.g., due to sensors
– A “simple” impedance can provide a robust solution to the contact instability problem
• Structure matters
– Dynamics of physical systems are constrained in useful ways
• It may be beneficial to impose physical system structure on a general dynamic system
– e.g. a robot controller
Mod. Sim. Dyn. Sys.
Interaction Stability Neville Hogan page 24
Some other Irishmen of note
• Bishop George Berkeley
• Robert Boyle
• John Boyd Dunlop
• George Francis Fitzgerald
• William Rowan Hamilton
• William Thomson (Lord Kelvin )
• Osborne Reynolds
• George Gabriel Stokes
Mod. Sim. Dyn. Sys. Interaction Stability Neville Hogan page 2 5