From: AAAI Technical Report WS-02-02. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved.
Achieving Global Coherence in Multi-Agent Caregiver Systems:
Centralized versus Distributed Response Coordination in I.L.S.A.*
ThomasA. Wagner
HoneywellLaboratories
3660 Technology Drive, MN65-2600
Minneapolis, MN55418
http://www.drtomwagner.com/-wagner
wagner_tom@
htc.honeywell.com
Abstract
In orderfor multi-agentsystemsto exhibitglobalcoherence
the agentsmustcoordinatetheir activities or be limitedto a
problem
spacein whichactivities are highlyindependent.
In
the elder care domain,globalcoherence
acrossthe agentsystemresponsiblefor givingthe care requirescoordination
if
onlybecausethe differentagentsin the systeminteract over
a set of sharedresources, namelythe individual for whom
the systemprovidescare andthe fallbackhuman
caregivers.
In this paperweexplorethe generalcoordinationissue in
the elder care problem
spaceand discussthe responseplanningandcoordination
portionsof the Independent
LifeStyle
TMagent systembeingdeveloped
Assistant
at Honeywell.
Introduction
Onekey aspect of multi-agent systems (MAS)on which different researchers can agreeis that the MASmodelmeans
distributed processingand distributed control. Aswith other
distributed processing models, one important problem of
MASresearch is howto obtain globally coherent behavior from the systemwhenthe agents operate autonomously
and asynchronously.In general, whenthe agents share resourcesor the tasks beingperformedby the agents interact,
the agents mustexplicitly workto coordinate their activities. I Consider a simple physical example.Let two maintenance robots, R1and R2, be assigned the joint task of moving a long table from one roomto another. Let both robots
also have an assortmentof other independentactivities that
must be performed, e.g., sweepingthe floor. Assumethat
neitherrobot canlift the table byhim/herself.In orderfor the
robots to movethe table together they must coordinatetheir
activities by 1) communicatingto determine wheneach of
the robots will be able to schedulethe table movingactivity,
2) possibly negotiating over the time at whichthey should
*Thisworkwasperformedunderthe supportof the U.S. Departmentof Commerce,
NationalInstitute of StandardsandTechnology, AdvancedTechnologyProgram,CooperativeAgreement
Number70NANBOH3020.
Copyright1~)2002,American
Associationfor Artificial Intelligence(www.aaai.org).
All rights reserved.
~Forapplicationdomains
in whichthe activities of the agents
are mostlyindependent,
or the actionscardedoutby the agentsare
particularlylightweight(so the implications
of an intersectionare
slight), explicitcoordination
maynot be necessary.
97
movethe table together, 3) agreeing on a time, 4) showing
up at the table at the specified time, 5) lifting the table together, and so forth. This is an exampleof communicationbased coordination that produces a temporal sequencingof
activities enablingthe robots to interact and carry out the
joint task (over a shared resource- the table). Withoutthe
coordinationprocess, it is unlikely that the table wouldever
be movedas desired unless the robots randomlydecided to
movethe table at the samemomentin time. Notethat if the
robots are designedto "watch"each other and "guess" when
the other is goingto movethe table that this is an instance
of coordinationby plan inference and still countsas a coordination episode. In general, achievingglobal coherencein
a MAS
wheretasks interact requires coordination.
In the robot/table example, the coordination episode
is peer to peer. Imagine now a room full of maintenance robots, each having multiple joint tasks with other
agents and all sharing physical resources such as tools and
floorspace or X/Ycoordinates. Withoutcoordination said
room full of robots would have muchin commonwith a
preschool"free play session" with robots movingabout, unable to performtasks due to obstacle avoidancesystemsalwaysdiverting themfromtheir desired directions or due to
the lack of a required tool. There are two primary waysto
coordinatethis roomfull of robots - either in a distributed
peer to peer (or group to group) fashion or in a centralized fashion. Whencoordination is distributed each agent
is responsible for determiningwhento interact with another
agent and then having a dialog to determinehowthey should
sequencetheir activities to achieve coherence. Whencoordinationis centralized generallyoneagent plans for the others or managesa shared resource. Notethat in the example
abovecoordination focuses on whento performa given task.
Coordinationcan also be about whichtasks to perform,what
resourcesto use, howto performa task, and so forth.
Whilethe robot domainis goodfor illustrating conceptually the coordination problem,the need for coordination is
not limited to robots. Considerthe IndependentLifeStyle
Assistant TM (I.L.S.A.) system being developed at Honeywell. I.L.S.A. is a multi-agent systemthat monitorsan individual in his/her homeand automatesaspects of the care
giving process. For instance, I.L.S.A. maynotify a caregiver if the individual being monitoredshould go too long
without eating. I.L.S.A. is a multi-agent systemwheredif-
Response
Planning and Coordination
Se~nsor Informalon
andInterpreted
SensorInformation
Medication Management
DomainAgent
Selected/ Not Selected
and/or Results
Action
I information
on~
Caregivers
Ilnformation ~
on
PersonBeing
Monitored
I_
Mobility
I Informationo!
Conditionsto
Monitor
Coordinated
Action Requests/
Results
Other DomainAgents
PhoneAgent
WebPedAgent
Caregivers
2; " ,x
Other Ul Device Agent
Client
=
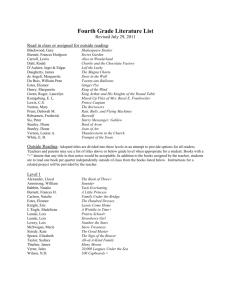
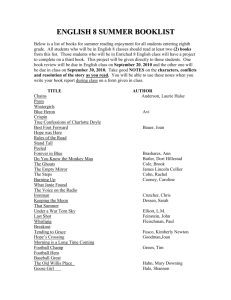
Figure1: TheResponse
PlarmingComponent
of I.L.S.A.
ferent agents are responsible for sensing, reasoning about
the sensor data, deciding on a course of action, and interacting with the caregivers and the individual for whichthe
systemis giving care. Withoutcoordination in I.L.S.A. it
wouldbe possible for the systemto exhibit undesirablecharacteristics. For instance, the agents might overburdenthe
individual for whichcare is being given by issuing a series
of separate remindersall within a few minutes of one another, e.g., "it is timeto take yourmedication,"
"it is timefor
lunch," "you haven’t been movingas muchtoday""I believe
the oven is on" Imaginethe impact of having a telephone
ring or a beeper go off every few minutes with a different
reminderfunction. Worsestill, imagineif the client were
to fall and the emergency
notification beingsent to a caregiver wasdelayedso that the client couldbe remindedto eat
his/her lunch. Or imaginethat sameclient, whois unable to
get up, listening to the phonering wherethe ring is caused
by a reminderthat it is timeto take a nap. I.L.S.A.’s MAS
requires coordination. Throughcoordination we can organize
the responses producedby the different agents and achieve
globally coherentbehaviorfor the systemas a whole.
project, whichis another multi-agentsystemfor intelligent
facilities management.While IHome’sgoals are different
there are strongparallels in the projects.
For the purposes of this paper we will use the moniker
"Lois" to denote the individual of whichI.L.S.A. is taking
care and the term "caregiver" to denote somehealth care
professionalthat mayassist I.L.S.A. in dealing with certain
situations.
In the followingsections weprovide moredetail about the
agent coordination problemin I.L.S.A., discuss the process
of selecting betweendistributed and centralized coordination, discuss the coordinationtechniqueusedin I.L.S.A. and
identify future coordinationissues.
Coordination Evaluation in I.L.S.A. is Part of
a Larger Effort
The study of coordination in MAShas a long history that
goes backto the early workin distributed artificial intelligence (Lesser &Erman1980; Lesser & Corkill 1981). Recent efforts include generalizedapproachesto coordination
(Decker &Li 1998), team centered coordination (Tambc
Zhang1998), formalisms of joint problemsolving (Grosz
& Kraus 1996; Cohen & Levesque 1990; Wooldridge &
Jennings 1994), research in coordination protocols (Singh
1998) and others (Jennings, Sycara, & Wooldridge1998).
Despite progress in these areas, the community
as a whole
I.L.S.A.’s overall architecture and the system’s design
goals are more fully documentedin other papers (Haigh,
Phelps, & Geib 2002). In this paper we focus on the coordination problemof the I.L.S.A. system and compareit
to the coordination techniques used in the UMASS
IHome
98
lacks a science or methodology
that one can apply to determinewhichtype of coordination is appropriate for a given
application. Theunderlyingscience that is neededis 1) an
understandingof the importantdomaincharacteristics (e.g.,
dynamicand distributed, size and scope), and 2) howthese
mapto the strengths of the different coordinationtechnologies and approachesthat are used. For instance, in a dynamic supply chain managementproblem (Wagner, Guralnik, &Phelps2002)whereagents are situated at the sites of
all involvedparties and all productsare built to order, there
is no centralized control and there is no steadymarketstate.
In this case, agents mustcoordinate by reasoningabout the
value of candidate options as well as order deadlines and
interactions betweendifferent options (e.g., a manufacturer
needsmaterials frommultiple suppliers to fill an order and
must thus negotiate with themover delivery times to meet
its deadline).Thisis in contrast to the I.L.S.A.caregiverdomainwhereresponses can be centrally coordinated and the
coordination process does not involve interactions between
certain classes of activities. Thecontributionof this particular paperis in the high-level analysis of the I.L.S.A. coordination space and in the centralized coordination approach
used. The communityis working to develop a science in
this area, e.g.,(Durfee 2001) and (Wagner,Smith, &Vouros
2002).
Response Planning and Coordination in
I.L.S.A.
In the current implementationof I.L.S.A. the coordination
problempertains to organizing activities over shared resources - namelythe interfaces to the caregivers and Lois.
Asdiscussed in the conclusionother aspects of I.L.S.A. are
candidatesfor coordination,e.g., the coordinationof multiple I.L.S.A. instances and the coordinationof agents within
I.L.S.A. overtask relationships.
I.L.S.A.’s overall architecture is documentedin (Haigh,
Phelps, & Geib 2002). Here we focus on the subset of the
architecture that deals with 1) decidinghowto respondto
given situation that exists with Lois, and 2) coordinatingthe
different responses that maybe on going at any given momentin time. This functionality is loosely called response
planning and coordination and the subset of the architecture is shownin Figure 1. Responseplanningin I.L.S.A. is
carried out by multiple domainagents, each of whichhas a
particular area of expertise. For instance, there is a domain
agent that monitors Lois’ medicationand issues reminders
to her if she forgets to take her medicationon scheduleand
issues notifications and alerts to caregiversif Lois doesnot
correct her medicationsituation. Other domainagents specialize in toileting, eating, falls, mobility,andsleeping, to
namea few. The domainagents receive multiple different
types of input fromother agents in the system.Specifically:
¯ The intent recognition agent provides information on the
plans Lois is likely to be performing.For instance, Lois
might be cookingdinner with somespecified probability.
¯ Thesensor clustering agent providesfiltered sensor data,
e.g., toilet flushes or informationfrommotiondetectors.
This agent also providesthe clock pulse.
99
¯ The database agent provides the domainagents with information on conditions for which they are to monitor
(e.g., track the consumptionof medication X) and how
they should respondif a particular circumstancearises.
For instance, if Loisfalls to take her medication,first remindher, then notify caregiver X using device Y, then if
she remainsinappropriatelyunmedicatedissue an alert to
caregiver Z using device K.
¯ Domainagents also receive feedbackfrom a response coordinator (below) agent and results backfrom the device
agents whenappropriate (e.g., indicating the caregiver
has acceptedan alert and will handle the condition).
Fromthis data the domainagents monitor the environment, monitorLois’ condition, and respond whennecessary.
Domainagents respond to problemsby interacting with Lois
or one or moreof the caregivers. Responsesfall into four
categories: reminders(to Lois), notifications (to caregivers
of somecondition), alerts (to caregivers of someserious
condition), and alarms(to caregivers of somelife threatening condition). The domainagent responses are the coordination focal point. The response coordination problemin
I.L.S.A. has the followingproperties:
¯ The domain agents operate asynchronously and autonomouslyand generally do not interact to solve problems. The implication is that any domainagent maygenerate an action request at any time. For our purposesit is
sufficient to viewaction requestsas a request to interact
witha caregiveror Loisvia one of the UI devices.
¯ The agents share several resources, namelythe UI devices
andindirectly the caregiversand Lois.
¯ In additionto the resourceinteraction, action requestspotentially intersect on a temporalbasis. In this case for
there to be a resource coordination problemthe requests
mustoccur within a certain temporalproximityto one another or within a systemstate window
(below).
¯ Theresponse space for a particular individual caregiver
or a particular client (Lois) is relatively sparse, i.e., the
numberof interactions that the systemneeds to havewith
any given individual is small over time. Wecan makethis
characterizationbecausethe endpointsof these action requests are humanand boundedby humancapacity. For instance, Lois cannot process 10,000interactions a minute
nor can a givencare provider.
In contrast, the load of a given device maybe relatively
high whencomparedto the load on an individual caregiver or Lois. Consideran I.L.S.A. installation wherethe
only interaction medium
for Lois and all caregivers is the
telephone. The telephone itself maybe a bottleneck unless usageis coordinatedaccordingly.
In additionto interacting oversharedresources, action requests interact with each other throughpriority. For instance, if the falls domainagent issues an alert because
it has determinedthat Loishas fallen, the alert condition
should take precedenceover a previously issued, but not
yet fulfilled, requestto notify a caregiverthat Loisis behind on her medication.
¯ Action requests also interact through systemstate. For
instance, if the panic agent issues an alarmbecauseLois
has pressed her panic button, remindersfrom the other
domainagents (to Lois) must be suppressed.
¯ Different responseshave different interaction protocols
that I.L.S.A. must follow. For instance, remindersgo to
Lois. Notifications are sent to caregivers but the caregivers do not needto explicitly acknowledge
them. Alerts
are sent to caregivers and require explicit acceptanceplus alerts cause I.L.S.A. to cycle over a list of caregivers until one is found whowill accept responsibility
for handlingthe alert. Alarmsare sent to a list of selected caregivers all at once, in parallel. Eachof these
responsesis further conditionedby device, e.g., caregiver
Bobmightalwayswantto be notified via cell phonerather
than beeper.
¯ Oneof the designgoals of I.L.S.A. is to keepthe architecture openso that 3rd parties can add customor enhanced
functionality.
¯ The domainagents will execute in close proximityto one
another or will have a reliable networkconnectionbetweenthem. This is necessary for themto obtain informationabout the environmentand to monitorLois.
Onthe surface, the response coordination problemspace
in I.L.S.A. is akin to that found in the UMASS
IHome
(Lesser et al. 1999) project. In/Homeagents managedifferent appliancessuch as the hot water heater, dish washer,
washingmachine,coffee maker,and coordinate their activities to improvethe quality of life for the occupants,e.g.,
makingsure that there is sufficient hot water for morning
showerswhile still getting the laundry done and the dishes
washed.In IHomecoordination centers on shared resources
like hot water, electricity, noise, and a sharedmobilerobot
(simulated) that can performselected tasks within the environment.
In both/Homeand I.L.S.A. two primary approaches for
solving the coordination problemsexist - centralized and
distributed. In IHomeboth centralized and distributed approaches are used and the motivationfor each selection is
morewell understoodtoday than it wasat the time the decision was made.For resourcesthat are characterized as 1)
not centralized and 2) not heavily contested, a decentralized
approachis used. In the decentralized approachagents are
responsiblefor coordinatingon their ownbehalf, i.e., there
is no single agent that serves as the moderatoror controller
for that resource. The noise resource is an exampleof a
resource over whichthe agents coordinate in a distributed
fashion. For resourcesthat are centralized, such as hot water
whichis producedlocally by the hot water heater, an agent
is assignedthe task of controlling and coordinatingusageof
the centralizedresource.In the case of hot water,a hot water
heater agent handlesthe allocation of hot waterto individual
agentsfor their use.
Whatare the important differences betweenthe hot water
resource and the noise resource in/Home?Howdo these
differences relate to I.L.S.A.? Thehot water resourceis inherently centralized. Thenoise resource is inherently distributed (spatially). This is an importantdistinction because
not all agents that makenoise actually needto coordinatein
/Home.For instance, the television agent wouldnot need
to coordinatewith the vacuum
cleaning agent if they are located in different roomsof the home.In this case, a centralized coordination mechanismis unnecessaryand undesirable (assumingthat the process of determiningwhether
or not the agents need to coordinate is low cost). In contrast, the hot water used by the dishwasheralways comes
from the samesource as the hot water used by the shower
which always comes from the same source as the hot water used by the washingmachineand so forth. In this case,
these agents alwaysneedto coordinate their activities and
their coordination will often span morethan an individual
pair of agents. Additionally, in IHome,hot water proves to
be a fairly contentiousresourceso centralized coordination
serves to reduce messagetraffic and coordinationoverhead.
To summarize,axis along which to evaluate a coordination approach suggested by IHomeinclude 1) how many
agents use a given resource, 2) whetherthe resource is inherently centralized or distributed, 3) howcontentious the
agents are for the resource. Anotherissue that arises in
/Homeis whenmultiple resources are required by a given
agent before any processing can be performed, e.g., the
washingmachineneedsnoise, electricity, and hot water resources to function. This class of resource issues does not
occurin I.L.S.A.(yet) thoughthe first three criteria are useful metricsin I.L.S.A..
Nowconsider I.L.S.A.’s coordination problemas specified above. If we distill that informationand correlate related items wecan enumeratea subset of importantissues to
considerwhenevaluating I.L.S.A.’s coordination needs:
¯ All of the domainagent action requests interact over the
set of UIdevices(directly) andthe set of caregiverst.J Lois
(indirectly).
¯ Actionrequests also interact with each other throughsystem state and priority. Notethat systemstate is a global
condition (e.g., systemis in alarmstate so suppressall
remindersto Lois).
¯ The numberof action requests expected to be issued by
the systemis computationallyboundedon the upside by
the sumof the processingcapabilities of the caregivers
plus the capability of Lois, i.e., the number
of requeststhe
systemwill generate and process will be small by computer standards.
¯ The action requests are lightweight activities that do not
require large amountsof processingto evaluate.
¯ Theagents do not needto engagein negotiation activities
or perform complexcross agent task sequencingactivities.
¯ BecauseI.L.S.A. mustadhere to a set of protocols for issuing notifications, alarms, alerts, and reminders,if domainagents are given direct access to the devices they
must each implementportions of the protocols (some of
the protocol requirementsare implementedby the device
agents).
¯ I.L.S.A. should support the addition of 3rd party / after
marketagents to the system.
i00
Reminder
R_y Arrives
ReminderR_x Arrives ¯ ReminderR~JArdves
ReminderArdves RemindefAi’rives
ReminderArrives
Reminder
An’ires
\
TimeInterval T
TimeInterval T
TimeInterval T
Y
Y
V
Pool Reminders for Lois
Pool Reminders for Lois
Pool Reminders for Lois
Issue Reminders to Lois
~)
Issue Reminders to Lois
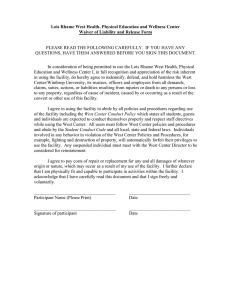
Figure2: CentralizedCoordinationPacingReminders
Theend result? Weselected a centralized approachto responsecoordinationin I.L.S.A.. This is due in part to the
wayin whichthe lightweight action requests mayinteract
anddue to the ratio of requests to caregiversthat the system
will exhibit in order to be useful. Centralizationprovidesan
efficient path for responsecoordinationthat webelieve will
scale with the systemin the case of I.L.S.A.. Centralization
is also particularly appropriatefor I.L.S.A. becausethe action requests are lightweight and not strongly situated temporally, i.e., the domainagents do not needreal-time timeor
performanceguarantees thus consequencesof an action request being delayedby another are slight (if any). Centralized coordinationis still required (versus no coordination)
to ensure that the agents do not overwhelmthe caregivers
or Lois and to ensure that importantmessagesare sent in a
timely fashion. Centralization also enables us to encapsulate certain trusted behaviorsin an agent of our owndesign.
If coordination were performedin a peer to peer fashion,
a poorly written or malicious 3rd party agent could wreak
havocwiththe systemby not coordinatingwell (or at all).
The centralized approachto coordination is implemented
by the responsecoordinator, shownin Figure 1. This agent
is responsiblefor acceptingall action requests fromthe domainagents and coordinatingthe requests as follows:
¯ If multiple remindersfor Lois occur within someperiod
of time"/’the remindersare multiplexedinto a single messageso that Lois onlyreceives one phonecall or oneemaii
messagethat contains the set of reminders. Spaceprecludes presentationof the algorithmbut it is illustrated in
Figure 2. Thegeneral idea is to create temporal buckets
into whichall requests that occur within their boundaries
are tossed. Whenthe edge of the temporalwindowarises,
the reminderscontainedin the bucket are multiplexedand
sent. Theimplications are that somereminderswill be delayed slightly, however,this is also the only wayto ensure
that Lois is botheredby a reminderat mostevery "/’time
units.
¯ If multiple notifications for the samecaregiver occur
within the sameinterval of time, they are treated as the
remindersare for Lois (above).
¯ Whenalarms and alerts are generated, they are immediately dispatchedto the appropriate devices accordingto
101
the appropriate protocol (whichthe response coordinator
implements.)
¯ If the systemis in a state such that remindersto Lois are
to be suppressed(e.g., an alarmhas beenissued), the action requests are returned to the domainagents instead of
being issued to Lois. The domainagents are told whythe
requests were refused and are able to reissue the request
at somepoint in the future. If the conditionhas clearedin
the meantime,the newrequests are granted. Note that the
task of tracking the systemstate and knowingwhenit is
clearedis also centralized with the responsecoordinator.
¯ Note that device load is moderatedby the binning algorithm shownin Figure 2. If device load becomesa
performanceissue we can adjust the algorithm or implementother protocols, e.g., store lowpriority messagesfor
longer periods of time, easily by changingthe response
coordinator’scontrol algorithm.(Currentlyaspects of this
class of concernsare also carried forwardinto the implementationby using priority queues at the device agent
level so that alarms and alerts are alwaysissued before
remindersand notifications.)
It is importantto note that centralization in the general
case maynot alwaysbe desirable. Centralization can lead
to a localized performancebottleneck and creates a system
witha single point of failure. If the agentsare spatially distributed centralization also introduces networkuncertainty,
latency, and connectivityissues so that evenif the centralized coordinator is still online and functioningagents who
are unable to connectare unable to coordinate. Otherissues
with centralization include scale and computationallimitations - if coordinationrequires deeptemporalanalysis it is
unlikely that any single agent could handle the coordination
problemof even a fairly modestMAS.Other issues that are
particularly importantfor agent-basedecommerce
are localized control and informationhiding or privacy. In general,
we strongly advocate a distributed approachlike that used
in our supply chain research (Wagner,Guralnik, & Phelps
2002) and other research that is based on T/EMS
(Decker
Li 1998), DTCagent scheduling (Wagner,Garvey, &Lesser
1998), and GPGPagent coordination (Decker &Li 1998).
However,as enumeratedabove, I.L.S.A.’s requirementsare
different and the characteristics of the current and near term
problemspace lead us to a centralized approach.
Conclusions and Future Work
Coordinationwithin I.L.S.A. currently centers on coordination oversharedresources,i.e., the interfaceto the caregivers
and to Lois. In the future it maybe necessary to coordinate the activities of the other agents in the system.For instance, if the computationaltasks being performedby the
agents becomeheavyweightenough that they over burden
the processor, performanceof certain tasks mayhaveto be
coordinated to avoid unacceptable systemslow downs.Another exampleis if the sensor interpretation agents wereto
only performcertain analysis tasks if the output wereneeded
by one or moreof the agents in the system. In the current
model,the agents within the systemdo not explicitly reason
about the interactions in their activities and do not coordinate over said interactions. If agents wereto reason about
such interactions, it is highly probablethat distributed temporal task centered coordinationlike that used in our other
work, based on TAEMS/DTC/GPGP,
will be appropriate.
Anotherarea in whichcoordinationwill play a role in the
I.L.S.A. project is whenthe I.L.S.A. systemis deployedin a
multi-unit care facility. In this setting, one I.L.S.A. system
will take care of one client but the pool of humancaregivers
will be common
across the set of I.L.S.A. systems (or at
least subsets maybe common).
The individual I.L.S.A. systems will thus need to coordinate over non-emergency
tasks
to optimizecaregiver time and to prevent thrashing behavior (caregivers being overbooked,not havingsufficient time
witheachclient, etc.).
Acknowledgments
The I.L.S.A. project is a large effort at HoneywellLaboratories and manyindividuals havecontributedto the intellectual underpinningsof the project. Someof the contributors
are: Chris Miller, Karen Haigh, David Toms,WendyDewing, Steve Harp, Christopher Geib, John Phelps, PeggyWu,
Valerie Guralnik, RyanVan Riper, ThomasWagner,Steven
Hickman,and others.
References
Cohen,P., and Lcvesque,H. 1990. Rational interactions
as the basis for communication.
In Cohen,P.; Morgan,J.;
and Pollack, M., eds., Intentions in Communication.
MIT
Press.
Decker,K., and Li, J. 1998. Coordinatedhospital patient
scheduling.In Proceedingsof the Third International Conference on Multi-Agent Systems (ICMAS98),104-111.
Durfee, E. H. 2001. Scaling up agent coordination strategies. IEEEComputer39--46.
Grosz, B. J., and Kraus, S. 1996. Collaborative plans for
complexgroupaction. Artificial Intelligence 86:269-357.
Haigh,K.; Phelps, J.; and Geib, C. 2002.Anopenagent architecture for assisting elder independence.In Proceedings
of the First Intl. Joint Conferenceon Autonomous
Agents
and Multi-Agent Systems. To appear.
102
Jennings, N. R.; Sycara, K.; and Wooldridge,M. 1998. A
roadmapof agent research and development. Autonomous
Agents and Multi-Agent Systems 1(1):8-38.
Lesser, V. R., and Corkill, D. D. 1981. Functionallyaccurate, cooperative distributed systems. IEEETransactions
on Systems, Man,and Cybernetics 11(1):81-96.
Lesser, V. R., and Erman,L. D. 1980. Distributed interpretation: A modeland an experiment. IEEETransactions on
ComputersC-29(12): 1144-1163.
Lesser, V.; Atighetchi, M.; Horling, B.; Benyo,B.; Raja,
A.; Vincent, R., Wagner,T.; Xuan,P.; and Zhang,S. X.
1999. A Multi-AgentSystemfor Intelligent Environment
Control. In Proceedingsof the Third International Conference on AutonomousAgents (Agents99).
Singh, M.P. 1998. Developing formal specifications to
coordinate heterogenous autonomousagents. In Proceedings of the Third International Conferenceon Multi-Agent
Systems (ICMAS98),261-268.
Tambe, M., and Zhang, W. 1998. Towards Flexible
Teamworkin Persistent Teams. In Proceedings of the
Third International Conferenceon Multi-Agent Systems
(ICMAS98).
Wagner,T.; Garvey, A.; and Lesser, V. 1998. CriteriaDirected Heuristic Task Scheduling. International Journal of ApproximateReasoning,Special Issue on Scheduling 19(1-2):91-118. A version also available as UMASS
CS TR-97-59.
Wagner,T.; Guralnik, V.; and Phelps, J. 2002. Software
agents: Enabling dynamicsupply chain management
for a
build to order product line. In Proceedingsof Agentsfor
BusinessAutomation.Toappear. A version also appears in
the Proceedings of the AAAI02Workshopon Agents for
Business Automation.
Wagner, T. A.; Smith, S.; and Vouros, G. 2002. Toward an Application Science: MASProblem Spaces and
Their Implications to AchievingGlobally CoherentBehavior. Workshop
held at the 1st International Conferenceon
AutonomousAgents and Multi-Agent Systems.
Wooldridge,M., and Jennings, N. 1994. Formalizing the
cooperative problemsolving process. In Thirteenth International Workshop
on Distributed Artificial Intelligence,
403--417.