From: AAAI Technical Report WS-02-02. Compilation copyright © 2002, AAAI (www.aaai.org). All rights reserved.
An Overview of the Assisted
Cognition Project
Henry Kautz, Dieter Fox, OrenEtzioni, GaetanoBorriello, and Larry Arnstein
Dept. Computer Science & Engineering
University of Washington
Seattle, WA98195
Abstract
The rise of Alzheimer’s disease is one of the greatest health crises facing the industrialized world. Today, approximatelyfour million Americanssuffer from
Aizheimer’sdisease; by 2050, the numberis expectedto
rise to 15 million people. As a result of the increasing
longevity of the elderly, manysufferers are nowaware
that their capacities to remember,
to learn, and to carry
out the tasks of everydaylife are slowlybeinglost.
The Assisted Cognition Project is a newjoint effort
between the University of Washington’sDepartmentof
ComputerScience, MedicalCenter, and Alzheimer’sDisease ResearchCenterthat is exploringthe use of AI systems to support and enhancethe independenceand quality of life of Alzheimer’spatients. Thegoal of the Assisted Cognitionproject is to developnovelcomputersystemsthat will enhancethe quality of life of peoplesuffering from Alzheimer’sDiseaseand similar cognitive disorders. Assisted Cognition systems use ubiquitous computing and artificial intelligence technologyto replace
someof the memoryand problem-solvingabilities that
have been lost by an Aizheimer’spatient. Twoconcrete
examplesof the Assisted Cognition systems we are developing are an ACTIVITY
COMPASS
that helps reduce
spatial disorientation both inside and outside the home,
and an ADAPTIVE
PROMPTER
that helps patients carry
out multi-step everydaytasks.
Introduction
In the last 50 years Alzheimer’s disease has changed
from a relatively rare ailment to one of the defining characteristics of industrialized societies. In 1950 at most
200,000 people in the UShad Alzheimer’s disease; this
number increased to 500,000 by 1975, and stands at 4
million today (National Institute 2000). By 2050 the
numberof Alzheimer’s patients in the US is expected to
be 15 million, out of a world total of 80 million (Shenk
2001). The economic toll of Alzheimer’s is staggering:
caring for a single person with Alzheimer’s disease costs
more than $47,000 a year whether a person is at homeor
in a nursing home(Rice, Fox, & Max 1993).
Alzheimer’s disease is a specific medical condition
distinct from the "normal" kinds of forgetfulness that
Copyright(~) 2002, AmericanAssociationfor Artificial Intelligence (www.aaai.org).All rights reserved.
6O
come with aging (Hooyman& Kiyak 2001). Reisberg’s
seven stage theory describes the typical progress of the
disease. In stage 1, the disease has begun but is asymptomatic. In early Alzheimer’s, stages 2-3, patients exhibit forgetfulness, easily becomelost, have difficulty
with word and name recognition, misplace objects, etc.
In the middle stages, 4-5, the ability to perform multistep tasks without assistance and frequent prompts is often impaired. Late Alzheimer’s, stages 6-7, include loss
of awarenessof surroundings, loss of speech, and finally
loss of basic psychomotorskills.
For centuries technology has been created to help people with physical limitations: consider eyeglasses, hearing aids, wheelchairs, and artificial
limbs. Wehave
coined the name "Assisted Cognition" for new synthesis
of AI and ubiquitious computing technology designed
to help people with the cognitive limitations associated
with Alzheimer’s disease and similar conditions.
With physical limitations it is obvious that an individual’s level of function is determined by the total system of the individual and his or her environment. For
example, a wheelchair bound person in a city without wheelchair ramps and wheelchair accessible buses
has limited mobility, while that same individual in a
wheelchair-friendly city can have high mobility. In judging cognitive function it is likewise important to take account of the environmental context.
For example, in a familiar, static environment, a person in early stages of Alzheimer’s mayshowa high level
of function in performing everyday tasks as dressing and
housework. The familiar sights and sounds of the home
provide implicit prompts to initiate appropriate behavior.
For example, when the person wakes in the morning the
sight of the light slanting in the window,the smell of
coffee coming up the stairs, and the sounds of the person’s spouse movingabout in the kitchen below triggers
the start of the person’s morning routine: e.g., getting
out of bed and walking toward the bathroom. Place the
same person in a novel environment and he or she have
difficulty in performing such basic tasks (Lawton 1983).
Just as important as the physical environment is
the social context of other people. For example, an
Alzheimer’s patient may cometo rely on the memory,remindings, guidance, and prompts of a caregiver, such as
a spouse or other family member(Reisberg et al. 1982;
Shenk2001). Thusthe social environmentcan provide
active interventions that extendthe patient’s ability to
handle the challenges of everydaylife. But there is a
limit to any person’s capability to provide such help:
physical and emotional ’burnout" of caregivers, often
with serious health consequences,is a common
phenomena (Hooyman& Kiyak 2001).
The goal of Assisted Cognition is to develop computer systems that can provide such active assistance
to an Alzheimer’spatient. In brief, Assisted Cognition systems(i) sense aspects of an individual’s location and environment,both outdoors and at home,relying on a wide range of sensors such as Global Positioning Systems(GPS),active badges, motiondetectors,
and other ubiquitouscomputinginfrastructure; (ii) learn
to interpret pattemsof everydaybehavior, and recognize
signs of distress, disorientation, or confusion,using techniques fromstate estimation, plan recognition, and machine learning; and (iii) offer help to patients through
various kinds of interventions, and alert humancaregivers in case of danger.
Theultimate aim is for Assisted Cognitionsystemsto
becomean integral part of a patient’s physical and social contexts. After providingan overviewof organization of the Assisted Cognitionproject at the University
of Washington,wewill briefly describe two specific Assisted Cognitionsystemswe are developing, the ACTIVITY COMPASS
and the ADAPTIVE
PROMPTER.
The Assisted
Cognition
Project
at UW
The Assisted CognitionProject is an interdisciplinary
effort between manyorganizations with expertise in
computerscience and/or care of Alzheimer’spatients.
The first category includes the University of Washington’s Dept. of ComputerScience and Engineering, the
Dept. of Electrical Engineering,and Intel Research.The
secondincludes the Alzheimer’sDisease ResearchCenter (ADRC),the UWschools of Nursing, Health and
Public Policy, and Medicine, and the UWMedicalCenter.
UWis a national center for research on Alzheimer’s
disease. The ADRC
is one of 32 centers fundedby the
National Institute on Aging, and has a unique emphasis
on the care of Alzheimer’spatients in the home.The
UWMedical Center runs the Alzheimer’s Disease Patient Registry, whichtracks a populationof 3,500people,
both normallyaging and those with Alzheimer’s,and the
school of Medicinehosts the National AlzheimerCoordinating Center.
An important partner in the Assisted Cognition
Project is EliteCare, a private companywhosework in
building and running retirement homesis pushing the
state of the art in ubiquitiouscomputing
applicationsfor
the elderly (ComputerWorld).
Oatfield Estates is a living prototype homefor 60 residents in Portland, OR.In
additionto providinghigh-speedinternet access and customizedapplications for its residents, the homesenses
and records nearly all activity going on in or around
it’s campus.This includes the movements
of all resi61
dents and staff, operation of all lights and appliances,
movement
of all doors, etc. This enormousand detailed
real-world source provides the primaryraw data for our
project. In addition, weare also gathering other realworld data sources. For example, a major part of the
ACTIVITY
COMPASS
system involves learning patterns
of behavior from GPSdata. Wehave built small GPS
recorders fromoff-the-shelf hardwareand are gathering
initial data sets fromthe movements
of students involved
in the project.
Ourrich set of collaborationsallow us to take a principled approachto Assisted Cognition, wherein(i) research is basedon real, not simulateddata, (ii) applications are designedin collaboration with experts on care
of the elderly, and (iii) developedsystemsare tested
real patient populations,rather than simplyshownoff as
a one-time demo.
Examples of Assisted Cognition Systems
Webegin by describing two concrete examplesof Assisted Cognition systems we are developing, and then
briefly describing someof the common
underlying technical research.
The Activity Compass
The ACTIVITY
COMPASS
is an Assisted Cognition tool
that helps direct a disorientedpersontowardstheir destination. Thecompassis basedon our client/server architecture (see Figure 1) wherethe client handles interaction withthe user, and the server stores sensor readings,
constructed models, and backgroundinformation. The
ACTIVITY
COMPASS
client is a hand held device. We
refer to it as a compassbecausethe central user interface elementis a large arrowthat directs a personbased
on their current location and the system’sassessmentof
their desireddestination.
For example, whencoupled with a Global Positioning System(GPS), the compassmaydetect that a patient is wanderingaround and appears to be lost. In
this case, it maysuggest that the patient headhomeby
pointing the arrowin an appropriate direction, and displaying the graphic for "home".Inside the home,the
compasscan rely on indoorsensors to direct a persontowardsthe kitchen whenmeal time is overdue,or towards
the medicinecabinet (with appropriate graphics, again)
whenappropriate.
Theseexamplesmayappear straight forward, but several capabilities haveto be in place before the ACTIVITY
COMPASS
Canfunction effectively. First, the compass
needsto construct a high level modelof a person’sactivities basedon sensors readings and correspondingbackgroundinformation. Outdoors,for example,the sensors
are simply GPScoordinates and the backgroundinformation is a detailed mapannotated with key locations
and addresses(e.g., "home","doctor’s office"). In this
case, the compassneeds to record the person’s typical
activities such as favorite walks, destinations, etc.and
construct modelsof typical behavior. In addition, GPS
readings can be augmentedby additional sensors to com-
pute the person’sorientation; outdoors, attaching a tiny
"real" compassto the client can provide orientation information, and triangulation on IR signals can achieve
the sameeffect indoors.
Next, plan recognition is essential for the compassto
makesense of the stream of sensor readings about the
patient current actions. Finally, the compassneeds to
assess whethera deviation froma normalpattern constitutes a causefor interventionor not. For example,if the
patient is walkingto a newlocation in a commercial
area
she maybe going to a newly openedcafe; the compass
should not attempted to direct her home.However,if
the patient has beenwandering
in circles for hours, then
intervention is clearly appropriate. Intermediatecases
require appropriate reasoningunderuncertainty.
The ACTIVITY
COMPASS
is designed to learn from its
ownexperience of interacting with the patient. Which
interventions are well received? Whichare ignored? Is
the patient’s behaviorchangingover time? Aremoreinterventions warranted?Frequently, the compasswill be
able to detect the answersto these questions automatically and updateits behavioraccordingly.
The Adaptive Prompter
A commonproblem in the early to middle stages of
Alzheimer’sis a difficulty in carryingout complex
tasks,
while the ability to performsimple actions is relatively
unimpaired(Reisberg et al. 1982). Somecomplextasks
-- such as driving -- should certainly not be attempted
by anyonewith Alzheimer’s,while manyother activities
of daily living -- such as personal grooming,hobbies,
and housework--should be supported as long as possible. For example,an Alzheimer’spatient maybe able to
performthe individual steps in dressing him or herself,
but be unable to recall the proper sequenceof actions,
e.g. that socksgo on before shoes.
The adaptiveprompteris a systemthat helps guide an
impairedindividual throughthe steps of such an activity. Input to the system comesfrom a sensor network
embeddedin the homeenvironment.Data from the network,together with other informationsuch as the time of
day, is integratedto create a modelthat predicts whatthe
patient is trying to do. Thesensors mayinclude ones for
sound, motion,position of objects, movement
of doors,
operation of appliances, and so on. For example, the
systemmightnote that it is morning,and that the patient
entered the bathroomand turned on the sink. Sometime
passes, and the patient remains motionless. The system
predicts that the "morningtoothbrushing and bathing"
activity has begunbut becomestalled. Finally, the systemdecidesto interveneby promptingthe patient to pick
up the toothbrush.
Apromptcould be verbal or visual (e.g., using a spotlight that can highlightany object in the room),or a combination. Note that a promptis not given unless it is
deemednecessary, and promptsare not pre-programmed
for certain times of the time. AnAssistedCognitionsystem must show"emotional intelligence" (Klein, Moon,
&Picard 2(X)2),becauseunnecessarypromptingis likely
to be moreharmfulthan helpful.
62
Technical Components
Both the ACTIVITY COMPASSand ADAPTIVE
PROMPTER
are based on a layered architecture (see Fig.
1) linking sensor data to behaviors, behaviorsto plans,
and plans to potential interventions. Eachlayer takes in
noisy and uncertain information,abstracts and fuses the
data to reduce (but not alwayseliminate) uncertainty,
and passes this higher-level view of the world to the
next layer. Feedbackfromthe effects of invention feed
back downthrough the layers, in order to improvethe
accuracy and effectiveness of the underlying models.
Belowwe briefly describe someof the ongoingresearch
issues for eachlayer.
Sensor Layer
A fundamental and commonsubproblem to manyAssisted Cognitionapplications is the issue of localization (Brumitt & Sharer 2001) -- namely, knowingthe
position of objects and/or people with a certain degree
of accuracyand precision. In this project, wewill install
and investigate a variety of sensorsfor locationtracking,
including infrared based active badges, GPS,Berkeley
motes(attached to householdobjects), and accelerometers (Hightower&Borriello 2001). These sensors have
very different capabilities, ranging fromsub-centimeter
distance accuracy(infrared ID tags) to purely incremental motionsensing (accelerometers).Otherkinds of sensors we are employinginclude weight sensors (on beds
and furniture) and monitorson all lights and appliances.
Our Intel Researchpartners are nowdesigning specialized sensors for use in a bathroom,including water and
waste flow sensors and an instrumented medicine cabinet.
Data Fusion Layer
The ability to extract information from a continuous
streamof data collected by a large numberof sensors is
one of the fundamentalproblemsfor Assisted Cognition
systems. In order to deal with noisy sensor information
weapply Bayesfilters, whichestimate posterior probability densities overthe completestate of a dynamicsystem. In the AssistedCognitionproject, the state vector
can contain a variety of information such as the location of a person, the current weathercondition, or the
fact whetherthe person wears a rain coat. The sensor
modeldescribes the uncertainty of the sensor in connection with a modelof the environment.Posterior densities
over the state are updatedusing a version of Baye’srule.
All variables can be high-dimensionalvectors yielding
a potentially exponential growthin complexity.Fortunately, independences
betweendifferent parts of the state
space can be used to reducethe complexityof the reasoning process (Koller & Lerner 2001). Figure 2 shows
exampleof the track of a user of an early prototypeof the
activity compassas he walks around the UWcampus.
A major preconditionfor successful location tracking
is the availability of a mapof the environmentdescribing the sensors andtheir locations. Asdiscussedin (Brumitt &Shafer 2001), geometricmodelscan significantly
Client
Server
Sensors
Decision Making
(graphics,speech)
Plan Recognition
Data Fusion
DataCollection
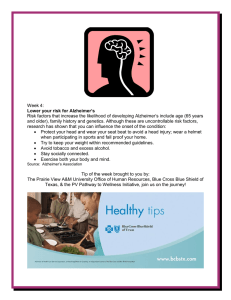
Figure 1: Architecture of Assisted Cognition systems. The server module consists of layers of increasing levels of abstraction.
Probabilistic models of sensors and the environment are applied to process noisy sensor data. User activities are tracked using
hierarchical Bayesian models. Probabilistic descriptions of these activities help to determine the user’s plans and goals, which
enable the system to choose which interactions to trigger. The models are continuously updated and refined based on information
collected by the sensors.
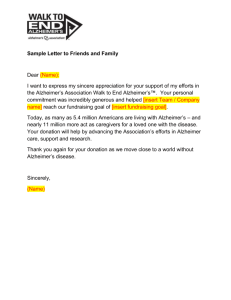
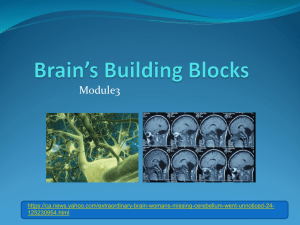
Figure 2: An prototype activity compass monitoring the movementof a user as he walks around the UWcampus. The x’d line is
based on the raw GPSreadings. The smoothline is the actual trail of the user.
increase the performanceof ubiquitous computingenvironments. Unfortunately, such models do not exist
for most homeenvironments,and a manualconstruction
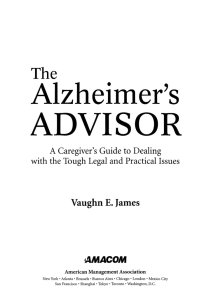
can be extremelydifficult. Weproposeto build geometric mapsusing a mobile robot as an active sensing device (Thrun, Burgard, & Fox 2000). A map of a 50m
x 50mlarge environmentand the mobilerobot used to
learn this mapis shownin Figure1.
Behavior Recognition Layer
Theoutput of the data fusion layer are probability distributions over locations of people and objects at each
point in time. These state sequences form the basis for the estimation of user activities. Overthe last
years, there has been tremendousprogress in the developmentof state-based Bayesian approachesfor user
modeling(Horvitz et al. 1998) and humanaction recognition (Pentland 1995). Theseapproachesconnect seamlessly with sample-based
Bayesfilters and they are well-
suited to bridge the gap betweenlowlevel state estimation and higher level behaviorrecognition. For example,
a sequenceof locations leading to the grocerystore followedby a loss of GPSsignal can be used to extract a
highprobability that the person is currently buyinggroceries.
Thetechniques discussed so far do not only apply to
location tracking but extend directly to morecomplex
scenarios like the ADAPTIVE
PROMPTER.
For example,
the state can additionally contain information whether
the faucet is running or whether the person took the
toothbrush from the bathroomcabinet.
Plan and Intention Recognition Layer
Plan recognition is the task of identifying an actor’s
plans andgoals givena partial viewof that actor’s behavior (Schmidt, Sridharan, &Goodson1978; Kautz1991).
Solutions to this problemare essential, becauseif the
computeris to provide appropriate assistance to a per-
son it needsat least a roughunderstandingof the goals
the person is trying to achieve, and prototypical methods (i.e. plans) for achievingthose goals. Thecomputer
needsto assess whetherthe plan is proceedingsmoothly
(no interventionis required)or, alternatively, whetherthe
personis stymiedand intervention is appropriate. Acentral idea in plan recognitionis that plans are hierarchical
in nature, with a lattice of moreand moreabstract plans
connectingobservableactions to high-level goals.
Weare currently developinga probabilistic version of
the version-spaceapproachto plan recognition (Lesh
Etzioni 1995;Lau, Domingos,&Weld2001), in order to
handle uncertain observationsand plans that maycontain
errors on the part of the performer.This is an openand
challengingarea of research.
Intervention Layer
Oneof the key decisions for any intelligent user interface, and for AssistedCognitionsystemsin particular, is
under whatcircumstancesshould the systeminitiate an
interactionwiththe user. If the systemis overlyreluctant
to makesuggestions,then it risks being ineffective; but
if it is overlyintrusive, thenit is likely to be turnedoff
by the user.
Akey role for the plan recognitionlayer is to discriminate betweenthe followingcases: the patient is executing a plan successfullyor merelypottering about and
oughtto be left in peace;the patient is executinga flawed
plan but a specific suggestionor a gentle reminderwill
get her on track; the patient is disoriented or confused
and needsto be re-directed; or the patient is in danger
and an alert is appropriate. Making
such discriminations
reliably is one of the keychallengesof this project. One
sourceof informationthat will help is endowing
our system with a modicum
of "emotionalintelligence" (Klein,
Moon,&Picard 2002)in an attemptto track not only the
patient’s actions but also her emotionalstate. Emotions
as measuredby voice timber and intonation, skin conductivity, and pulse rate can provideimportantcuesas to
whetherthe patient needs help, and howshe is responding to specific suggestions.
Weformulate the discrimination problem in a
decision-theoretic framework(see (Etzioni 1991;
Horvitz et al. 1998)) that weighs the following factors: (i) The benefit to the patient from the system’s
suggestion; (ii) The probability the system’s model
the situation is accurate; and (iii) The cost of making
a mistake, in terms of negative impact on both the
patient’s health and perceivedusefulness of the system.
Wetrack each intervention (and each "close call"
wherea decision was madeto not intervene) along with
the factors that led to that decision,and subsequentreadings of the patient’s and the environment’sstate. This
data formsthe basis for negative and positive examples
that help the Assisted Cognitionsystemevolve its policies regarding whento intervene and whento hold back.
Related Work
There are a numberof recent projects on AI systemsfor
care of the elderly, but none(to our knowledge)
targeted
at Alzheimer’spatients, or basedon large datasets from
a potential user population. TheAwareHomeat Georgia
Techprototypes technologies to create a homethat can
perceive and assist its occupants(Sanders 2000). The
Nursebotproject at CMU,
U. Pittsburgh, and U. Michigan (Baltus et al. 2000) aims at developing personal
robots to help elderly peopleduringtheir everydaylives.
Research in Learning Humansproject at the MITMedia Lab (Pentland 1995)has developedprobabilistic algorihtms for behaviorrecognition that are used in our
work,althoughwe are focusingon a distinct set of input
modalities (GPSand motionrather than vision). Finally,
general workon behavior recognition with the goal of
creatingintelligent user interfacesis the focus of several
projects at Microsoft Research, including Easy Living
(Brumitt &Shafer 2001)and Attentional UserInterfaces
(Horvitz &Paek 2001).
Project Status
OrganizationAssisted CognitionProject at the University of Washingtontook place in the Fall of 2001, and
an initial teamof faculty, students, and staff fromIntel
Research and EliteCare are nowengagedin laying the
technical groundwork:building the sensor infrastructure, collecting data, and implementing
initial versions
of the data fusion layer. In parallel we are workingon
a principled approachto the design and linkage of the
behavior and plan recognition layers. In the Spring of
2002 we began an ongoing seminar on Assisted Cognition, bringing together medicaland engineeringfaculty
and students.
Webelieve that research on AI for cognitive aids
has boundlessopportunityfor bothpractical applications
and fundamentalinsights into perception, reasoning, and
human-computer
interaction.
References
Baltus,G.; Fox,D.; Gemperle,
E; Goetz,J.; Hirsh,T.; Magaritis, D.; Montemerlo,
M.;Pineau,J.; Roy,N.; Schulte,J.;
andThrun,S. 2000.Towards
personalservicerobots for the
elderly. In Proe.of the Workshop
on InteractiveRoboticsand
Entertainment(WIRE-2000).
Brumitt,B., and Shafer,S. 2001.Better living throughgeometry.Personalarut UbiquitousComputing
5(1).
ComputerWorld.
Oatfield estates elite care assisted living units. A Search for NewHeroes: The 2001 ComputerWorld21st CenturyAchievement
Awards,online at
http’//www.cwheroes.org/.
Etzioni, O. 1991.Embedding
decision-analyticcontrol in
a learningarchitecture.Artificial Intelligence49(1-3):129160.
Hightower,
J., and Borriello, G. 2001.Locationsystemsfor
ubiquitouscomputing.Computer
34(8).
Hooyman,
N. R., and Kiyak,H. A. 2001. Social Gerontology:a Multidisciplinary
Perspective(6th Edition).Allynand
Bacon.
64
Horvitz, E., and Pack, T. 2001. Harnessingmodelsof users’
goals to mediateclarification dialog in spokenlanguagesystems. In Proceedingsof the Eighth International Conference
on User Modeling.
Horvitz, E.; Breese, J.; Heckerman,
D.; Hovel, D.; and Romincise, K. 1998. The iumiere project: Bayesian user modeling for inferring the goals and needs of softwareusers. In
Proceedingsof the FourteenthConferenceon Uncertaintyfir
Artificial Intelligence.
Kautz, H. 1991. A formal theory of plan recognition and its
implementation.In Allen, J.; Kautz,H.; Pelavin, R.; and Tennenberg, J., eels., ReasoningAbout Plans. MorganKaufmann
Publishers. 69-126.
Klein, J.; Moon,Y.; and Picard, R. W. 2002. This computer respondsto user frustration: Theory,design,results, and
implications. Interacting with Computers- Special Issue on
Cognitionand Enwtion(to appear).
Koller, D., and Lemer,U. 2001. Samplingin factored dynamic systems. In Doucet, A.; de Freitas, N.; and Gordon, N., eds., SequentialMonteCarloin Practice. NewYork:
Springer-Vedag.
Lau, T.; Domingos, E; and Weld, D.S. 2001. Programmingby demonstrationusing version space algebra. Machine
Learning. In submission.
Lawton,M. E 1983. Environmentand other determinants of
well-being in older people. Gerontologist23(4):349-57.
Lesh, N., and Etzioni, O. 1995. A soundand fast goal recognizer. In Proceedingsof the FourteenthInternational Joint
Conferenceon Artificial Intelligence, 1704-1710.San Francisco, CA: MorganKaufmann.
2000. Progress report on alzheimer’sdisease 2000. online at
http://www.alzheimers.org.
Pentland, A. 1995. Machineunderstanding of humanaction.
In Proceedings7th International Forumon Frontier of Telecorn Technology.
Reisberg, B.; Ferris, S. H.; Leon,J. J.; and Crook,T. 1982.
Theglobal deterioration scale for the assessmentof primary
degenerative dementia. AmericanJournal of Psychiatry.
Rice, D.; Fox, E J.; andMax,W.1993. The economicburden
of alzheimer’sdisease care. HealthAffairs 12(2): 164-176.
Sanders,J. M.2000. Sensingthe subtleties of everydaylife.
Research Horizons.
Schmidt, C. E; Sridharan, N. S.; and Goodson,J.L. 1978.
Theplan recognition problem:an intersection of psychology
andartificial intelligence. Artificial bztelligence11:45-83.
Shenk,D. 2001. TheForgetting: AIzherimer’s:Portrait of an
Epidemic. NewYork, NY: Doubleday.
Thrun, S.; Burgard, W.; and Fox, D. 2000. A real-time algorithmfor mobilerobot mappingwith applications to multirobot and 3Dmapping.In Proc. of the IEEEInternational
Conferenceon Robotics & Automation(ICRA).
65