NASTER System Definition Proposal Remote Sensing Team © Copyright 2003 ABB Bomem Inc.
advertisement

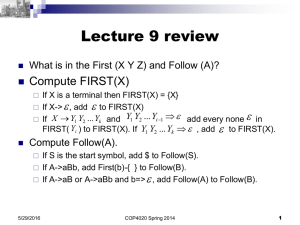
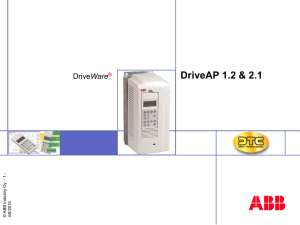
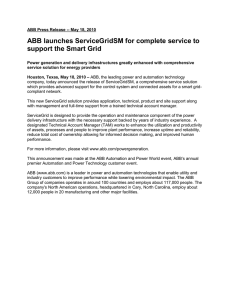
© Copyright 2003 ABB Bomem Inc. All rights reserved. - 7/14/03 Page 1 Remote Sensing Team NASTER System Definition Proposal © Copyright 2003 ABB Bomem Inc. Page 2 Overview n Review and comment the mid-IR requirements n Presentation of ABB’s current platform technology n Proposed approach for mid-IR NASTER n Proposed approach for initial NASTER n Discussion © Copyright 2003 ABB Bomem Inc. Page 3 Review of Requirements n The first NASTER Strawman requires wide coverage and high spectral resolution n A modular concept has been developed to address as much as possible the entire specification n Mid-IR NASTER Strawman requirements are less constraining on the spectral coverage and resolution n Modules of the initial concept have been used to address this new specification n We review the Mid-IR requirement first Mid-IR Requirement Review n Spectral Limits (SL): 665 - 2860 cm−1 (3.5 - 15 microns) n 1.4 © Copyright 2003 ABB Bomem Inc. Page 4 1.2 We suggest to split the range in 2 bands at 1750 cm−1 (5.7 microns) x 10 Spectral Coverage 1.4 x 10 -5 Radiance [W/(sr cm 2 cm -1 )] 1.2 1 0.8 GIFTS EHS FDS AIRS IAS I CrIS NAS TER 0.6 0.4 © Copyright 2003 ABB Bomem Inc. Page 5 0.2 0 0 500 1000 1500 2000 2500 3000 Wavenumbers [cm -1 ] • NASTER seems to be an Application test-bed for HES • NASTER does not seem to be a Hardware test-bed for HES Mid-IR Requirement Review © Copyright 2003 ABB Bomem Inc. Page 6 n Spectral Resolution (SR): Selectable from 0.25 - 1.25 cm−1 n Resolution limits maximum divergence inside interferometer n Off-axis pixels result in more constraining limitations n We suggest 0.25 cm−1 for the mid-wave and 0.5 cm−1 for the short wave and use off-axis IFOV’s with an inverse telescope (0.5) Circular, on-axis Mid-IR Requirement Review n © Copyright 2003 ABB Bomem Inc. Page 7 n Ground Resolution (GR): Contiguous at ≤ 500 meters from 20 km flight altitude within single FOR n Defines IFOV of 25 mrad n We suggest 250 meters ground resolution (12.5 mrad IFOV) Field of Regard (FOR): ≤ 2 km from 20 km flight altitude n Requirement suggests a 4x4 detector array n We suggest an 8x8 detector array to cover the 100 mrad square FOR Mid-IR Requirement Review n © Copyright 2003 ABB Bomem Inc. Page 8 n Along-track Scan Coverage (ATSC): ≤ 2 km FOR contiguity at 20 km for an aircraft speed of 400 kts n Speed and IFOV defines observation time of 10 seconds n Motion compensation and 10 seconds observation time provide contiguous along-track coverage Cross-track Scan Coverage (CTSC): Selectable from 2 to 20 km, depending on spectral resolution, from 20 km flight altitude for an aircraft speed of 400 kts n Defines a minimum observation time of 1 second Mid-IR Requirement Review n Noise Equivalent delta Temperature (NEdT): Spectrally random brightness temperature ≤ 0.25 K @ 0.25 cm−1 spectral resolution within the spectral range of 4.5 to 14 microns scene temperature of ≤ 260 K NESR [W/(cm 2 sr cm -1 )] © Copyright 2003 ABB Bomem Inc. Page 9 10 10 10 10 -4 -6 -8 -10 500 Blackbody @ 260K 0.25K NEdT CrIS Design Goals s c a led for 2.5 sec observation time and required res olution 1000 1500 2000 -1 Wavenumber [cm ] Required performances are similar to Design Goals for CrIS 2500 3000 Mid-IR Requirement Review n Absolute Error (AE): Absolute brightness temperature error ≤ 0.5 K within the spectral range of 4.5 to 14 microns scene temperature within the 200 - 300 K range n © Copyright 2003 ABB Bomem Inc. Page 10 n Main contributors are radiance uncertainty of calibration targets and non-linearity of detector response Calibration Sources (AE): Warm Blackbody, Ambient Blackbody, Zenith Sky view Mid-IR Requirement Review © Copyright 2003 ABB Bomem Inc. Page 11 n Scan Angle Coverage (SAC): Selectable over a range from zenith (180°) to Horizontal (at either + or - 90°) to any combination of a set of viewing angle steps which together provide contiguous coverage over a range from ±50 degrees about Nadir (0°) n Defines the scene selection continuous pointing range of ±50 degrees plus 5 discrete pointing position n Requires scanning without FOV rotation 50 degrees 2km Mid-IR Requirement Review n Lifetime: ≥ 10 years through parts replacement over time n Build the system with standard parts used in commercial standard products n Requires a single contractor responsible for the system n © Copyright 2003 ABB Bomem Inc. Page 12 n Contractor must have access to standard spare parts Design type: Modular to allow for detector, spatial and spectral resolution, and data system upgrades as technology matures throughout the lifetime of the NASTER n Use flexible electronics (digitally controlled interferometer) n Provide good transmission over a broad spectral range for the interferometer n Provide sufficient resolution capability Mid-IR Requirement Review n Operational Requirements: Command Uplink/Data Downlink via over-the-horizon communications n Aircraft Compatibility: ER-2 (20 km), Proteus (17 km), Global Hawk (20 km), and, if feasible, the new SCI space plane “Spaceship 1” (55 km) © Copyright 2003 ABB Bomem Inc. Page 13 n Low pressure not seen as a problem with components used © Copyright 2003 ABB Bomem Inc. Page 14 Overview n Review and comment the mid-IR requirements n Presentation of ABB’s current platform technology n Proposed approach for mid-IR NASTER n Proposed approach for initial NASTER n Discussion ABB’s Current Platform Technology n © Copyright 2003 ABB Bomem Inc. Page 15 n Current platform technology consists of cube-corner based interferometers n Provides low-cost, reliable, products 24/7 unattended operation n 4-port, 2-port, and double-pass n Based on wishbone scan arm n Permanently aligned Flat mirror DA interferometers not used in commercial products n Porchswing scanning mechanism only supported for space qualified projects n Flat mirror interferometers are optically efficient for large imaging ABB’s Current Platform Technology n New BMXS electronics n Digital scan servo control n © Copyright 2003 ABB Bomem Inc. Page 16 n Programmable scan profile Flexible IR sampling based on high density fringe sampling n Constant clock sampling with phase detection n Variable OPD sampling n Ethernet, LVDS, 10/100 base n Embedded Linux n May support dynamic alignment ABB’s Current Platform Software n FTSW100 software suite includes n Run time module n Continuous spectrometer operation n Continuous housekeeping logging and diagnostics using multiple I/O n © Copyright 2003 ABB Bomem Inc. Page 17 n CAN Bus and CAN Open Control of measurement cycles n Configuration tools n Spectroscopy module n n Radiometric functions n Chemometric functions Database management n Propriatary SPC type files n Data can be exported to industry standard XML type © Copyright 2003 ABB Bomem Inc. Page 18 Overview n Review and comment the mid-IR requirements n Presentation of ABB’s current platform technology n Proposed approach for mid-IR NASTER n Proposed approach for initial NASTER n Discussion © Copyright 2003 ABB Bomem Inc. Page 19 Proposed Approach for Mid IR NASTER n 2 Spectral Bands with band separation optics at 1750 cm−1 n 2 imaging, fiber coupled, detector modules n New COTS control electronics with Ethernet link n Digitally controlled spectrometer n Double pendulum, cube-corner, interferometer with good efficiency from 300 to 2860 cm−1 n Selectable resolution with 0.075 cm−1 as minimum spectral sampling n ILS compatible with spectral sampling of 0.25 cm−1 from 665 to 1750 cm−1, and 0.5 cm−1 from 1750 to 2860 cm−1 n 250 meters IFOV at 20 km altitude n 10 seconds per interferometer sweep for 2 km swath n 34 mm ∅ entrance pupil. f/1 optics at detector n 8x8 FOR with contiguous coverage along-track n Motion compensation pointing mirror n 2 on-board calibration targets (Ambient and Hot) Proposed Approach for Mid IR NASTER Instrument Control Electronics Calibration Targets © Copyright 2003 ABB Bomem Inc. Page 20 Spectrometer Scene Selection Module Modules Description Instrument Integration & Support Scene Selection Module Spectrometer n Telescope n n Pointing mirror with motion compensation Interferometer with control electronics n Output optics Control electronics n Detectors and readout electronics n © Copyright 2003 ABB Bomem Inc. Page 21 Calibration Targets Instrument Control Electronics n 1 ambient (passive) cavity n 1 hot (active) cavity n Data management n Temperature controller n Dashboard (user interface) Mid IR NASTER - Resolution n Inverse telescope to reduce beam divergence inside interferometer n IFOV of 12.5 mrad n FOR made of 8x8 IFOV’s ILS @ 2860 cm -1 . MPD = 1 cm. 2 Low er limit FWHM = 0.603 cm -1 1.5 ILS @ 1750 cm -1 . MPD = 2 cm. 3.5 3 Low er limit FWHM = 0.3015 cm -1 © Copyright 2003 ABB Bomem Inc. Page 22 Instrument Line Shape 2.5 FWHM = 0.34127 cm 2 Instrument Line Shape FWHM = 0.65367 cm -1 As ymmetry = 0.24918 % 1 Shift of peak = 1.3775 cm -1 0.5 0 As ymmetry = 0.46937 % -0.5 2852 Shift of peak = 0.84241 cm -1 1.5 2854 2856 2858 2860 2862 -1 Wavenumber [cm ] 1 0.5 0 -0.5 1746 -1 1747 1748 1749 1750 1751 -1 Wavenumber [cm ] 1752 1753 2864 2866 © Copyright 2003 ABB Bomem Inc. Page 23 Mid IR NASTER - NEdT n Gold coated mirrors for pointing, telescope, and cube corners n CsI beamsplitter n PIR fiber to couple the interferometer to a PC-MCT linear array of 64 elements n D* of 4x1010 jones for the LW and 8x1010 jones for the SW n LW cut-off at 14.3 microns, SW cut-off at 5.7 microns n 375 microns pixels (f/1 optics at the detector) n 10 seconds observation time n 2x2 pixel aggregation for 500 meters ground resolution n Instrument temperature at 25°C n SW is the middle portion of the full interferogram Mid IR NASTER - NEdT 10 NEdT [K] 10 10 © Copyright 2003 ABB Bomem Inc. Page 24 10 10 2 Nois e E quivalent delta Temperature. 0.25, 0.5 cm -1 Res olution. 0 -2 Total NEdT Scene Shot noise Background Shot noise Detector & electronic noise Quantization noise Speed fluctuations & filter s lope Speed fluctuations & delay mismatch Sampling jitters Requirement -4 -6 500 1000 1500 2000 2500 Wavenumber [cm -1 ] n Detector noise limited n Second contributor is shot noise from self-emission 3000 Mid IR NASTER - NEdT n LW cut-off at 18.2 microns to get the entire CO2 absorption bands n D* of 2x1010 jones for the LW n Loss of performances in the water vapour bands from 1450 to 1750 cm−1 10 © Copyright 2003 ABB Bomem Inc. Page 25 NEdT [K] 10 10 10 2 Noise Equivalent delta Tempera ture. 0.25, 0.5 cm -1 Res olution. 0 -2 Total NEdT Scene Shot noise Background Shot noise Detector & electronic noise Quantization noise Speed fluctuations & filter slope Speed fluctuations & delay mismatch Sampling jitters Requirement -4 500 1000 1500 2000 Wavenumber [cm -1 ] 2500 3000 Mid IR NASTER - NEdT n Decrease the resolution to 2.5 cm−1 in the SW to meet requirement at 4.5 microns 10 NEdT [K] 10 10 © Copyright 2003 ABB Bomem Inc. Page 26 10 10 2 Noise Equivalent delta Temperature. 0.25, 2.5 cm -1 Resolution. 0 -2 Total NEdT Scene Shot noise Background Shot noise Detector & electronic noise Quantization noise Speed fluctuations & filter s lope Speed fluctuations & delay mismatch Sampling jitters Requirement -4 -6 500 1000 1500 2000 Wavenumber [cm -1 ] 2500 3000 © Copyright 2003 ABB Bomem Inc. Page 27 Overview n Review and comment the mid-IR requirements n Presentation of ABB’s current platform technology n Proposed approach for mid-IR NASTER n Proposed approach for initial NASTER n Discussion © Copyright 2003 ABB Bomem Inc. Page 28 Proposed Approach for Initial NASTER n 3 Spectral Bands (300 to 500 cm−1, 500 to 1650 cm−1, and 1650 to 2550 cm−1) n 3 detectors in 1 Stirling cooler (no band separation optics) n New COTS control electronics with Ethernet link n Digitally controlled spectrometer n Selectable resolution with 0.075 cm−1 as minimum spectral sampling n ILS compatible with spectral sampling of 0.075 cm−1 in the LW, 0.25 cm−1 in the MW, and 2.5 cm−1 in the SW n 250 meters IFOV n 1.25 second per interferometer sweep n 34 mm ∅ entrance pupil. f/1 optics at detector n 1x8 FOR with contiguous coverage along-track n +/- 34 degrees cross track scans with motion compensation n 2 on-board calibration targets (Ambient and Hot) Proposed Approach for Initial NASTER Aircraft Motion Ground Instantaneous Footprint LW 34 degrees MW 250m © Copyright 2003 ABB Bomem Inc. Page 29 2km SW 2km Resolution ILS @ 500 cm -1. MPD = 6.6667 cm. LW 12 -1 250m -1 FWHM = 0.096437 cm Instrument Line Shape MW Lower limit FWHM = 0.09045 cm 10 SW 2km 8 6 Shift of peak = 0.26322 cm -1 4 2 0 -2 498.5 499 499.5 ILS @ 1650 cm-1. MP D = 2 cm. 4 -1 Lower limit FWHM = 0.3015 cm -1 Lower limit FWHM = 3.015 cm 0.35 -1 FWHM = 0.32103 cm FWHM = 3.0281 cm 0.3 2.5 -1 0.25 2 Shift of peak = 0.86883 cm Instrument Line Shape Instrument Line Shape 501 ILS @ 2500 cm -1. MP D = 0.2 cm. 3 © Copyright 2003 ABB Bomem Inc. Page 30 500.5 0.4 3.5 -1 1.5 1 0.5 0 0.2 Shift of peak = 2.0107 cm -1 0.15 0.1 0.05 0 -0.5 -1 1646 500 Wavenumber [cm -1] -0.05 1647 1648 1649 1650 Wavenumber [cm -1] 1651 1652 1653 -0.1 2460 2470 2480 2490 2500 Wavenumber [cm -1] 2510 2520 2530 Proposed Approach for Initial NASTER Noise Equiva lent de lta Tempera ture . 0.075, 0.25, 2.5 cm -1 Resolution. 10 NEdT [K] 10 10 10 © Copyright 2003 ABB Bomem Inc. Page 31 10 10 1 0 -1 -2 Total NEdT Scene Shot noise Background Shot noise Detector & electronic noise Quantization noise Speed fluctuations & filter slope Speed fluctuations & delay mismatch Sampling jitters Requirement -3 -4 0 500 1000 1500 2000 2500 -1 Wavenumber [cm ] n D* = 4×109 (LW), 4×1010 (MW), and 1×1011 (SW) jones n MW and SW are middle portions of full resolution interferogram n 1 sweep, IFOV’s aggregation to 500 meters square Proposed Approach for Initial NASTER 10 10 NEdT [K] 10 10 10 © Copyright 2003 ABB Bomem Inc. Page 32 10 10 1 Noise Equiva lent de lta Tempera ture . 0.25, 0.25, 2.5 cm -1 Resolution. 0 -1 -2 -3 Total NEdT Scene Shot noise Background Shot noise Detector & electronic noise Quantization noise Speed fluctuations & filter slope Speed fluctuations & delay mismatch Sampling jitters Requirement -4 -5 0 500 1000 1500 2000 Wavenumber [cm -1] n 3 sweeps, IFOV’s aggregation to 500 meters square 2500 Proposed Approach for Initial NASTER 10 10 NEdT [K] 10 10 10 © Copyright 2003 ABB Bomem Inc. Page 33 10 10 Noise Equiva lent de lta Tempera ture . 2.5, 2.5, 2.5 cm -1 Resolution. 1 0 -1 -2 -3 Total NEdT Scene Shot noise Background Shot noise Detector & electronic noise Quantization noise Speed fluctuations & filter slope Speed fluctuations & delay mismatch Sampling jitters Requirement -4 -5 0 500 1000 1500 2000 2500 -1 Wavenumber [cm ] n 33 sweeps, IFOV’s aggregation to 500 meters square © Copyright 2003 ABB Bomem Inc. Page 34 Summary for Initial NASTER Range Desired 100 – 2500 cm−1 Proposed 300 – 2500 cm−1 Resolution 0.025 cm−1 0.075 cm−1 < 500 cm−1 0.25 cm−1 < 1650 cm−1 2.5 cm−1 < 2500 cm−1 Ground resolution FOR 500 m x 500 m 250 m x 250 m 2 km Observation time 10 sec Cross-track 2 – 20 km NedT (260 K) 0.2 – 1 K 2km aggregate to 4x1 1.25 sec 2 – 20 km (0.825 cm−1) 1.2 K < 500 cm−1 0.05 – 1 K < 1650 cm−1 0.7 – 2.5 K < 2500 cm−1 Proposed Approach for Initial NASTER © Copyright 2003 ABB Bomem Inc. Page 35 n MR type (AERI) interferometers with higher resolution and larger aperture considered in other airborne and space programs © Copyright 2003 ABB Bomem Inc. Page 36 SOFIS FTS On-board GCOM-A1 © Copyright 2003 ABB Bomem Inc. Page 37 Overview n Review and comment the mid-IR requirements n Presentation of ABB’s current platform technology n Proposed approach for mid-IR NASTER n Proposed approach for initial NASTER n Discussion