Document 13650807
advertisement

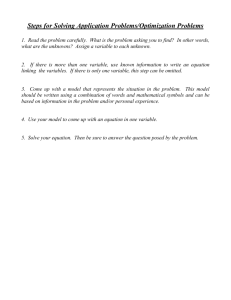
APPLICATIONS OF LINEAR ALGEBRA TO NON-LINEAR FUNCTIONS From many p o i n t s o f view t h i s c h a p t e r s h o u l d b e t h e l a s t few You may r e c a l l w e m o t i v a t e d t h a t c h a p t e r s e c t i o n s o f Chapter 6 . by l o o k i n g a t t h e s y s t e m o f e q u a t i o n s : and s t u d y i n g t h e s p e c i a l c a s e i n which f l , f u n c t i o n s of t h e n v a r i a b l e s xl, ..., and ..., and xn. f m were l i n e a r The r e a s o n f o r emphasizing l i n e a r i t y was based on t h e fundamental r e s u l t t h a t i f fl,..., and f w e r e n o t l i n e a r b u t w e r e a t l e a s t m continuopsly d i f f e r e n t i a b l e f u n c t i o n s of xlr..., ..., and xn, t h e n ..., and Axn would produce i n c r e m e n t s Ayl, i n c r e m e n t s Ax1, and Aym which c o u l d b e approximated by t h e d i f f e r e n t i a l s dy and dym, where Recall t h a t xl, ..., and ll..., x r e f e r t o increments measured from n all..., a g i v e n p o i n t ; s a y , xl xn - a n t s o t h a t each o f t h e c o e f f i c i e n t s , ayi/ a x j l i n ( 2 ) i s a c o n s t a n t , namely -- * - A c t u a l l y , had we b e e n c o n s i s t e n t w i t h o u r n o t a t i o n i n ( 1 ) we would an) r a t h e r than ( 2 ' ) . have w r i t t e n f i x ( a l , The c o n f u s i o n a r i s i n g from t h e u s e o f j m u l t i p l e s u b s c r i p t s e n c o u r a g e d u s t o a d o p t t h e s h n r t ~ rn o f a t i o n u s e d i n ( 2 ) and ( 2 ' ) . ..., 7.1 [where x = (xl,. ..,xn) and a = (alf.. ., an ) 1 In any e v e n t , t h e main p o i n t i s t h a t w h i l e s y s t e m (1) i s n o t n e c e s s a r i l y , and l i n e a r , system (2) is. That i s , system ( 2 ) e x p r e s s e s dyl,. dym a s , l i n e a r combinations of dxl, and dxn. .. ..., Thus, t h e s t u d y of l i n e a r a l g e b r a , introduced i n c h a p t e r 6 t o h e l p us s t u d y system (1) i n t h e c a s e t h a t t h e f u n c t i o n s were l i n e a r , can now be a p p l i e d t o system (2) provided only t h a t t h e f u n c t i o n s a r e continuously d i f f e r e n t i a b l e ( a f a r weaker [ i . e . , more g e n e r a l ] c o n d i t i o n than being l i n e a r ) . I n summary, w h i l e yl, and ym need and xn; dy and dym a r e n o t b e l i n e a r combinations of xl, ..., ..., ..., lf..., ..., and dxn; s o t h a t we may view Ayl, l i n e a r combinations of dxl, and Aym a s l i n e a r combinations of Ax1, Axn i n s u f f i c i e n t l y small ..., neighborhoods of a p o i n t (al...,a,). Our main reason f o r beginning a new c h a p t e r a t t h i s time i s s o t h a t w e may b e t t e r emphasize the i m p l i c a t i o n s of system ( 2 ) . The Jacobian Matrix I n terms of s t r u c t u r e , system (1) may b e viewed a s an example of That i s , system (1) may be i d e n t i f i e d w i t h t h e v e c t o r function f (z). d e f i n e d by where yl, ..., and ym a r e a s i n (1). [Equation ( 4 ) i s a b b r e v i a t e d a s u s u a l by y = f ( f f ) where (y,,...,~ m and x= y = (X~,--.,X~)I In Chapter 6 w e introduced such q u e s t i o n s a s whether f was o n t o and/or 1-1. W e could extend our i n q u i r y s t i l l f u r t h e r by asking what i t would mean to t a l k about, s a y , -k f (5) - lirn x+a For example, i n l i n e w i t h o u r p r e v i o u s s t r a t e g i e s , it would make sense t o say t h a t f(?I) = L lim (where 2 E -E E~ b u t L E" since f(5)E E ~ ) x+a means Given E > 0 t h e r e e x i s t s 6 > 0 such t h a t W e a l s o might have n o t i c e d t h a t may i t s e l f b e viewed a s an Namely, i f w e s u b s t i t u t e t h e v a l u e s o f yl, m-triple. t' ..., ahd Ym a s g i v e n by (1) i n t o ( 4 ) w e o b t a i n S i n c e each component of t h e m - t r i p l e i n e q u a t i o n ( 5 ) is a s c a l a r x we a l r e a d y know how t o compute l i m i t s i n v o l v i n g t h e s e [By way o f review l i r n f (f)= L means given E > 0 w e x-+a can f i n d 6 > O such t h a t o < 1 1 x---z 1 1 < 6 -+ ( f ( x ) <<EJ. x&, function of components. - LI I t would t h e n s e e m n a t u r a l t o u s e ( 5 ) - t o d e f i n e l i r n f(2);i . e . , x+g lim f (x) - = [lim fl(x) ,..., l i r n fm(x)l - ( D e f i n i t i o n ( 6 ) c a n be shown t o b e e q u i v a l e n t t o t h e ~ , 6 definitionb I but t h i s i s n o t too important i n t h e present context.) .. 1 L ! R e t u r n i n g t o ( 5 ) , n o t i c e t h a t we may now w r i t e f = - (71' (fll...lfm) with t h e understanding t h a t ( f l , ...,f m ) means [fl(x) , . . . , f m ( ~ ) l . I f we w e r e now t o become i n t e r e s t e d i n t h e c a l c u l u s of f it would seem n a t u r a l t o extend t h e n o t a t i o n i n ( 7 ) by d e f i n i n p and dx = - (dxl , . . . , d ~ To d e f i n e f ' (5) w e might then t r y t o copy t h e s t r u c t u r e used i n t h e c a l c u l u s of a s i n g l e v a r i a b l e . That i s , w e s h a l l t r y t o r e l a t e t h e form 9 and g,a s d e f i n e d by ( 8 ) , i n and then t o c a p t u r e t h e s t r u c t u r e i n (9), d e f i n e M t o be f'( 5 ) . Observe. t h a t equation (10) i s a " s t r a n g e animaltt, Neither & nor I n f a c t , each i s a v e c t o r and they need n o t have d x i s a number. t h e same dimension. That i s , 9 i s an m - t r i p l e , dx i s an n - t r i p l e and m need n o t e q u a l n. With t h i s i n mind, equation (10) should as suggest matrix arithmetic. (For example, viewing d~ and $ b ~ is m by 1 w h i l e dx is n by 1. column m a t r i c e s , we see t h a t Hence, by t h e u s u a l p r o p e r t i e s of m a t r i x m u l t i p l i c a t i o n M [ i n equation (10) 1 must be an m by n matrix. ) - I f w e re-examine system ( 2 ) i n an e q u i v a l e n t m a t r i x form, we s e e that r Equation (11) now t e l l s us how t o d e f i n e f'(5). Namely w e d e f i n e f ' (x) - t o be t h e m by n m a t r i x [ayi/ak. ] whereupon (11) becomes - 3 3 = g u ( ~ ) d.x [z] The m a t r i x i s s o important t h a t it i s given a s p e c i a l name, Namely independently o$ whether we e l e c t t o i n t e r p r e t i t a s (?I). I' i f yl...., and ym a r e continuously d i f f e r e n t i a b l e f u n c t i o n s of n independent v a r i a b l e s x ~ , . . . , and xn, we d e f i n e t h e Jacobian Matrix of yl, ...,y m w i t h r e s p e c t t o x l t . . . , x n t o be t h e m by n m a t r i x This m a t r i x i s o f t e n denoted by The remaining s e c t i o n s of t h i s c h a p t e r d e s c r i b e a p p l i c a t i o n s of t h e Jacobian. The I n v e r s e Function Theorem I n t h e previous u n i t , we d i s c u s s e d informally**how t o i n v e r t system (1) i n t h e c a s e m = n. Namely, given t h e system ..., .. * In many tex xn ) is reserved to name the determinant o Notice that determinants apply only to square matrices, hence, we prefer our notation and ,xn ) when w e mean the determinant. w e will write 1 a(yl,. .yn) /a(xl,. . I **That is, we used loose expressions such as "dy* A y" and "sufficiently small" without attempting to show what these meant in rigorous, computational terms. w e formed from which w e concluded (from our s t u d i e s of l i n e a r a l g e b r a ) t h a t ..., ... and dxn could be expressed uniquely a s l i n e a r combinations dxl, and dyn provided t h a t [ a y i l a k . ] was non-singular of dyl, 3 (i.e . , [ ayi/axj I-' e x i s t e d , o r i n t h e language of determinants, 01 d e t [ayi/ax. 1 J + . Restated i n t h e language of v e c t o r c a l c u l u s , from system (1) we obtained system (2). which i s e q u i v a l e n t t o 9= -f ' (-x )-d x , ayi where f'(5) = [-XI, 3 and we concluded t h a t we could s o l v e f o r that If'(5)1 * # 0. dx i n terms of 3 provided - In f a c t , i f If' - (x)1 # 0 t h e n This r e s u l t can be proven r i g o r o u s l y and once proven i t goes under t h e name of t h e I n v e r s i o n Theorem o r t h e I n v e r s e Function Theorem. The theorem c o r r o b o r a t e s what we a l r e a d y suspected from our informed treatment. More s p e c i f i c a l l y : The I n v e r s e Function Theorem n Suppose g:E +E" i s continuously d i f f e r e n t i a b l e * * a t 5 = 5 EE". I 1 * fl(x) Keep i n mind that is, i n the present context, a n n by n m a t r i x s o it m a k e s s e n s e to t a l k about t h e determinant of ,..., fl(x). **In terms o f f = (f fn), w e d e f i n e f to b e continuously d i f f e r e n t i a b l e ++ eacA of its s c a l e r - f u n c t i o n components fl,. , and f is c o n t i n u o u s l y differentiable. n 7.6 .. -.--. I I Then if f ' (2)# I I - --. 0 there is a (sufficiently small) neighborhood . ... I 119'(b)1 I = 1 1 ~ (a) ' 1 - where b - = f (a). -- -The theorem is given a computational application in Exercise 4.6.1. Pictorially, the theorem says: X -2 -- - - - - -f- - - S = f(R) % - En E" Summary 1. f is 1-1 on R, but = y E S where E R it is possible that there is 2. If f However z2 cannot another vector 5 2 ~ ~ 1such 1 that f = f is 1-1 on R). be in R (since 3. This is why the inverse function theorem is said to involve a local property. That is, all "bets" about f being 1-1 are "off' once R gets too large. -(xl) A r8 -;.:' In other words if S = f(R) then f:R-+S is (i.e., f1 Of = a exists). f is then a invertible, i.e., f'l: s + R exists. Moreover 3 = l' 'continuously differentiable function of yl, ,yn in S and ' I - h that, when restricted to R, f is 1-1 and onto lR I I I I I I I I I I I I I .a- xl New Look at the Chain Rule Suppose (zl) -f(z2). .. . . . and Then c l e a r l y , systems (12) and (13) 'allow us t o conclude t h a t zm a r e f u n c t i o n s of xl, x zl, n ..., . ..., Notice t h a t i f w e e l e c t t o w r i t e (12) and (13) i n such a way a s t o emphasize t h e i d e a of v e c t o r f u n c t i o n s , we have ,..., where:= (fl f k ) , P = (gl a r e a s i n (12) and ( 1 3 ) . I q t e r m s of ( 1 4 ) , we ,-...,g m ) ; and f l ,...,f k , see that i f 5 = q -f then -h : En gl,--,g, -t Em; i. e. , 2 = h(x) , where h (x) = g(: (5)) , and t h i s i n t u r n seems t o s u g g e s t t h e c h a i n r o l e . I n f a c t i f w e assume t h a t g and 3 a r e continuously d i f f e r e n t i a b l e , systems (12) and (13) l e a d t o - and Since (15) and (16) a r e l i n e a r systems, we may apply our knowledge of m a t r i x a l g e b r a t o conclude t h a t -- r and s i n c e m a t r i x m u l t i p l i c a t i o n i s a s s o c i a t i v e t h i s says t h a t I f w e now i n t r o d u c e t h e Jacobian n o t a t i o n a s w e l l a s t h e n o t a t i o n s dx and dz i n t o (17) i n t o (17) we o b t a i n - - With t h i s n o t a t i o n , n o t i c e a l s o t h a t (15) and (16) t a k e t h e forms dz - p - - dx To i d e n t i f y t h i s d i s c u s s i o n w i t h t h e d e r i v a t i v e s of v e c t o r f u n c t i o n s \ n o t i c e t h a t e q u a t i o n (19) s a y s while equation (19) s a y s 'since = h(x) , i t a l s o follows t h a t Comparing (21) and (22) w e s e e t h a t t h e chain r u l e a s it e x i s t s i n t h e s t u d y of t h e c a l c u l u s of a s i n g l e r e a l v a r i a b l e extends t o t h e c a l c u l u s of v e c t o r f u n c t i o n s . C By way of review, r e c a l l t h a t t h e "old chain r u l e s a i d : I1f f : E l + E l , g : E' - + E l a r e d i f f e r e n t i a b l e and h = gof, then h is a l s o d i f f e r e n t i a b l e . Moreover i f xo E don f , h 1 (xo) = g ' (yo) ) where yo = f ( x o ) . Now what w e have is: En +Ek and q : E~ + E ~a r e continuously d i f f e r e n t i a b l e and - = gof then h : En oreover, i f + x + E dom Em i s a l s o continuously d i f f e r e n t i a b l e . - f and yo = f , then -h 1 (s)= [ q l (yJ I [go(&) I In f a c t i f we i d e n t i f y 1 by 1 m a t r i c e s w i t h numbers, it i s e a s i l y seen t h a t t h e "old" c h a i n r u l e i s a s p e c i a l c a s e of the new chain r u l e . I n a d d i t i o n n o t i c e t h a t t h e Jacobian m a t r i x n o t a t i o n x ) i s an e x t e n s i o n of t h e i d e a of w r i t i n g a(yl, ...,yk)/ a(xl, n Namely, i f we look a t (18) and (23) w e s e e t h a t f ' (x) a s dy/dx. ..., , dz = - a(zl, a(Xl,.. ...,zm) .,xn) - dx and 3 so that = .. ,yk) a s a number Equation (23) i n d i c a t e s t h a t w e may t r e a t (yl,. and cancel i t from both numerator and denominator on t h e r i g h t hand s i d e of (231, s o t h a t t h e f r a c t i o n - l i k e n o t a t i o n f o r t h e Jacobian i s j u s t i f i e d . Again, a s reinforcement, n o t i c e i n t h e s p e c i a l c a s e t h a t r = k = m = 1, e q u a t i o n (23) becomes the f a m i l i a r r = k = m and e q u a t i o n ( 2 3) becomes A s another s p e c i a l c a s e i f exists) , -1 - (assuming = f - f 1 and s i n c e a(xlI". ,xn) = I ( s e e E x e r c i s e 4.6.8) a(xl, ...,x nI e q u a t i o n (24) r e a f f i r m s t h e f a c t t h a t Other computations a r e l e f t t o E x e r c i s e 4.6.4, and t h i s concludes our i n t r o d u c t o r y remarks concerning t h e Jacobian a s an extension of t h e c h a i n r u l e . F u n c t i o n a l Dependence , . . , - - . ,. I n o u r study of l i n e a r systems of e q u a t i o n s , we saw t h a t a c r u c i a l p o i n t was whether any of t h e e q u a t i o n s was a l i n e a r combination of the others. For example, we saw t h a t t h e system was n o t i n v e r t i b l e , even though it was t h r e e e q u a t i o n s i n t h r e e unknowns, because t h e t h i r d equation was twice t h e second minus t h e f i r s t . That i s , y3 + 2y2 yl; o r e q u i v a l e n t l y , yl = 2y2 y3, e t c . , b u t t h e important p o i n t i s t h a t a t l e a s t one of t h e e q u a t i o n s can be w r i t t e n a s a l i n e a r combination of t h e o t h e r s . - - For t h i s reason we s a y t h a t t h e system of e q u a t i o n s (25) i s l i n e a r l y dependent. The concept of l i n e a r dependence w i l l occur again i n o u r c o u r s e i n Block 7 when w e d i s c u s s d i f f e r e n t i a l equations and i n Block 8 when we t a l k more about l i n e a r a l g e b r a . For now, however, a l l we want t o p o i n t o u t i s t h a t t h e q u e s t i o n of i n v e r t i b i l i t y of a system of n e q u a t i o n s i n n unknowns was resolved i n terms of whether t h e system of e q u a t i o n s was l i n e a r l y dependent. This i d e a could be extended t o t h e c a s e i n which t h e number of e q u a t i o n s and t h e number of unknowns w e r e unequal. For example, i f we were given f o u r l i n e a r e q u a t i o n s i n seven unknowns, we would, i n g e n e r a l , e x p e c t t o be a b l e t o choose t h r e e of t h e unknowns a t random and t h i s would have t h e e f f e c t of reducing our system t o f o u r e q u a t i o n s i n f o u r unknowns, from which we could then determine t h e v a l u e of t h e o t h e r f o u r unknowns. The s u c c e s s of t h i s procedure, of course, r e q u i r e d t h a t t h e r e s u l t i n g system of f o u r equations i n f o u r unknowns was n o t l i n e a r l y dependent. Now, i f we l e a v e o u t any r e f e r e n c e t o t h e e q u a t i o n s being l i n e a r , t h e same type of q u e s t i o n s i s s t i l l suggested. For example, l i n e a r system of t h r e e e q u a t i o n s suppose w e a r e given t h e i n t h r e e unknowns, then we might be tempted t o ask whether t h e system can be i n v e r t e d . That i s , does (26) d e f i n e x,y, and z ( a t l e a s t , i m p l i c i t l y ) a s f u n c t i o n s of u,v, and w? Without t r y i n g t o e s t a b l i s h any a n a l y s i s of how we might o b t a i n t h e r e s u l t , t h e f a c t i s t h a t from (26) w e can show t h a t That i s , w i s dependent on u and v, even though now t h e dependence i s no longer l i n e a r . What t h i s means, by use of ( 2 7 ) , is t h a t any f u n c t i o n f ( u , v , w ) i s a c t u a l l y a f u n c t i o n only of t h e two independent v a r i a b l e s u and v (and n o t i c e t h a t we have n o t proven t h a t u and v a r e independent, b u t a glance a t ( 2 6 ) should convince you t h a t they are*) . In particular *But i n t h e e v e n t y o u a r e n o t c o n v i n c e d a more i n d e p t h s t a t e m e n t w i l l b e made later. I n any e v e n t , when a c o n d i t i o n such a s (27) h o l d s , we say t h a t t h e f u n c t i o n s ( v a r i a b l e s ) u , v , and w a r e f u n c t i o n a l l y dependent. This is Namely, every c a s e i n a g e n e r a l i z a t i o n of l i n e a r dependence. which we have l i n e a r dependence we a l s o have f u n c t i o n a l dependence, b u t we may have f u n c t i o n a l dependence without having l i n e a r dependence. Indeed, (27) shows us t h a t we have f u n c t i o n a l dependence, b u t t h e f a c t t h a t u2 a p p e a r s on the r i g h t s i d e of (27) t e l l s us t h a t t h e dependence i s n o n l i n e a r . There i s a very c o n c i s e mathematical way of s t a t i n g what we mean by f u n c t i o n s being f u n c t i o n a l l y dependent. For t h e sake of conc r e t e n e s s w e w i l l i l l u s t r a t e t h e d e f i n i t i o n i n terms of t h r e e e q u a t i o n s i n t h r e e unknowns, and then s t a t e t h e more g e n e r a l definition. u, v, and w a r e f u n c t i o n s of x, y , and z . Then u, v , and a r e s a i d t o be f u n c t i o n a l l y dependent i f and only i f t h e r e e x i s t s ;E , such = 0 b u t f # 0 , ath~ry=$e -13 ' 2 7and w a r e c a l l e d f u n c t i o n a l l y independent. f : E~ t h a t f (u,i,w) r , A , \ A complete understanding of t h i s d e f i n i t i o n a g a i n r e q u i r e s t h a t we know t h e d i f f e r e n c e between an i d e n t i t y and an equation. For example, i f f = 0 , then f ( y l , y 2 , y 3 ) = 0 f o r every 3 - t r i p l e What our d e f i n i t i o n s a y s t h a t i f f # 0 b u t f ( u , v , w ) = 0 (yl,y2,y3). t h e n u, v, and w a r e f u n c t i o n a l l y dependent. To i l l u s t r a t e t h i s i n terms of t h e s p e c i f i c system ( 2 6 ) , w e see from (27) t h a t Using ( 2 7 ' ) a s m o t i v a t i o n , c o n s i d e r t h e f u n c t i o n f J defined by C l e a r l y f i s n o t t h e zero f u n c t i o n , s i n c e among o t h e r t h i n g s , i f we l e t yl = y2 = yg = 1 i n (28) we o b t a i n f ( 1 1 , ) = l2 On t h e o t h e r hand, (28) says t h a t f ( u , v , w ) = u2 = -1 f 0. and t h i s i s i d e n t i c a l l y zero from ( 2 7 ' ) . 1-v- - 1 W, More i n t u i t i v e l y , t h e mathematical d e f i n i t i o n o f f u n c t i o n a l dependence simply s t a t e s t h a t t h e r e i s a n o n - t r i v i a l * r e l a t i o n s h i p - . between u, v, and w t h a t makes t h e s e v a r i a b l e s dependent. " Our aim i n t h i s s e c t i o n is t o show how f u n c t i o n a l d e p e n d e n c e ' i s r e l a t e d t o a Jacobian m a t r i x ( o r d e t e r m i n a n t ) . Again, o m i t t i n g .. proofs, t h e major r e s u l t is: . A. -. u = u ( x , Y , z ) , v = v ( x , Y , z ) , and w = w(x,y,z) where x , y, and z independent v a r i a b l e s and u,v,w a r e continuously d i f f e r e n t i a b l e . u, v, and w a r e f u n c t i o n a l d e p e n d e n t - i n some r e g i o n R i f and 1~ 0 i n t h e r e g i o n R (i.e., i f and only i s s i n g u l a r f o r a l l ( x , y , z ) ~R) Again, from an i n t u i t i v e p o i n t of view, t h i s c o n d i t i o n i s t h e only one t h a t p r e v e n t s u s from s o l v i n g f o r dx, dy, and dz i n terms of du, dv, and dw once we have t h a t With r e s p e c t t o ( 2 6 ) , observe t h a t therefore, 5 3 3 = 32x yz + 3 2 + 32x ~ y z ~ ~ 3 3 5 -32x y z 32xy3z3 32xy z 5 3 3 +32xy3z3 + 32xy5z 32x yz 32x yz - - - ~ ~ - *By " t r i v i a l " we mean t h a t f o r any t h r e e v a r i a b l e s U , V , and w ; ou o v + ow 3 0 . Non-trivial, therefore, i s reflected i n the d e f i n i t i o n by t h e r e q u i r e m e n t t h a t f $ 0 . + . which t e l l s us t h a t u, v, and w a r e f u n c t i o n a l l y dependent, even though i t may n o t r e v e a l t h e s p e c i f i c r e l a t i o n s h i p t h a t e x i s t s between u, v, and w. This r e s u l t c a r r i e s over i n t o t h e c a s e i n which we have more unknowns than equations. For example suppose t h a t f l , f n a r e continuously d i f f e r e n t i a b l e f u n c t i o n s of t h e n X1t-~tXn + k- ..., and + k variables Then t h e system of n-equations i m p l i c i t l y d e f i n e s any n of t h e unknowns a s d i f f e r e n t i a b l e f u n c t i o n s of t h e o t h e r k unknowns i n a neighborhood of a p o i n t s a t i s f y i n g ..., ( 2 9 ) i f t h e Jacobian determinant of f l , f n with respect t o the n dependent v a r i a b l e s i s not zero a t t h a t p o i n t . Again, f u r t h e r d e t a i l s a r e l e f t f o r t h e e x e r c i s e s . The Jacobian i s t o t h e s t u d y of t h e c a l c u l u s of v e c t o r f u n c t i o n s a s t h e d e r i v a t i v e i s t o t h e s t u d y of c a l c u l u s of a s i n g l e r e a l variable. I n o r d e r t o appreciate t h e Jacobian, we f i r s t introduced l i n e a r a l g e b r a and a p p l i e d t h i s s t u d y t o systems of e q u a t i o n s involving total differentials. I n t h i s c h a p t e r we have t r i e d t o g i v e an i n k l i n g a s t o what r o l e t h e Jacobian, i n p a r t i c u l a r , and m a t r i x a l g e b r a , i n g e n e r a l , play i n t h e development of t h e c a l c u l u s of s e v e r a l r e a l v a r i a b l e s . MIT OpenCourseWare http://ocw.mit.edu Resource: Calculus Revisited: Multivariable Calculus Prof. Herbert Gross The following may not correspond to a particular course on MIT OpenCourseWare, but has been provided by the author as an individual learning resource. For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.