Homework 3
advertisement

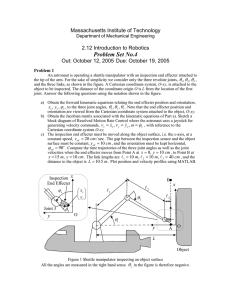
ME 506 – Advanced Control Systems Rose-Hulman Institute of Technology Homework 3 Due: Tuesday 22 September 2015 1) Datta 6.27 Show that the 2nd order matrix form printed is correct. Find the state space model and show that it is not controllable for the cases given. 2) An antenna pointing system has the following state space description: 0 x 1 4 1 x 2 0 70 17 x 0 0 0 3 x1 0 1 0 y x2 0 0 1 x 3 x1 x2 x 3 0 1 u1 0 0u1 a) Is the system controllable? Explain why or why not. b) Is the system observable? Explain why or why not. c) Is the system stabilizable? Explain why or why not. 3) [Bonus] The pendulum with adjustable added mass is released from rest near the horizontal and swings to the vertical. Numerical values are given below. Find the non­linear equation of motion, and linear perturbation model (Jacobian matrices) leaving as a symbol. Use Simulink to simulate the following three models and compare for accuracy: a) Full non­linear simulation b) Linearized model, using = 0 as expansion point. c) A time varying pseudo­linear model where the Jacobian matrix is augmented with a non­linear term at the current state, as: Page 1 of 2 Rose-Hulman Institute of Technology Parameter Value with units m 68.5 g p m 88 g Lp 43.2 cm d 5 cm w w d 2.5 cm Lcg Lp/2 s For part c) Show results updating the Jacobian matrix every 15 degrees and every 30 degrees. Note that you must form the perturbation state as – . The “Quantizer” block in simulink is helpful in determining the trim point. ME 406 – Control Systems – Lab 2 Page 2 of 2