2.161 Signal Processing: Continuous and Discrete MIT OpenCourseWare rms of Use, visit: .
advertisement

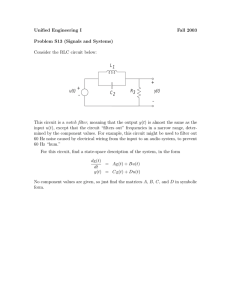
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute of Technology Department of Mechanical Engineering 2.161 Signal Processing - Continuous and Discrete Fall Term 2008 Lecture 81 Reading: 1 • Class handout: Introduction to Continuous Time Filter Design. • Class Handout: Introduction to Operational Amplifiers. • Class Handout: Op-Amp Implementation of Analog Filters. Second-Order Filter Sections (a) Low-Pass Filter Hlp (s) = a0 s2 + a1 s + a0 High Frequency Behavior: The number of poles exceeds the number of zeros (n − m = 2) so that lim |H(jΩ)| = 0. Ω→∞ and the high frequency asymptotic slope is -40dB/decade. Low Frequency Behavior: lim |H(jΩ)| = 1 Ω→0 √ Mid Frequency Behavior: The response in the region Ω ≈ a0 is determined by the systems damping ratio ζ, and will exhibit a resonant peak if ζ < 0.707. |H ( j9 ) | 1 0 1 9 c D.Rowell 2008 copyright 8–1 (b) High-Pass Filter Hhp (s) = s2 s2 + a1 s + a0 High Frequency Behavior: The number of poles equals the number of zeros (n = m) so that lim |H(jΩ)| = 1. Ω→∞ Low Frequency Behavior: There are a pair of zeros at the origin so that lim |H(jΩ)| = 0 Ω→0 and the low frequency asymptotic slope is +40dB/decade. √ Mid Frequency Behavior: The response in the region Ω ≈ a0 is determined by the systems damping ratio ζ, and will exhibit a resonant peak if ζ < 0.707. |H ( j9 ) | 1 0 9 (c) Band-Pass Filter Hbp (s) = s2 a1 s + a1 s + a0 High Frequency Behavior: The number of poles exceeds the number of zeros (n − m = 1) so that lim |H(jΩ)| = 0. Ω→∞ and the high frequency asymptotic slope is -20dB/decade. Low Frequency Behavior: There is a single of zero at the origin so that lim |H(jΩ)| = 0 Ω→0 and the low frequency asymptotic slope is +20dB/decade. √ Mid Frequency Behavior: When s = j a0 , √ H(j a0 ) = 1 which defines the passband center frequency. 8–2 |H ( j9 ) | 1 0 a (d) Band-Stop Filter 9 0 s2 + a0 Hbs (s) = 2 s + a1 s + a0 High Frequency Behavior: The number of poles equals the number of zeros (n = m = 2) so that lim |H(jΩ)| = 1. Ω→∞ Low Frequency Behavior: There are no zeros at the origin and lim |H(jΩ)| = 1 Ω→0 √ Mid Frequency Behavior: There are a pair of imaginary zeros at s = ±j a0 forcing √ the response magnitude to zero at a frequency Ω = a0 . √ |H(j a0 )| = 0 which defines the band rejection (notch) center frequency. |H ( j9 ) | 1 0 a 0 8–3 9 2 Transformation of Low-Pass Filters to other Classes Filter specification tolerance bands for high-pass, band-pass and band-stop filters are shown The most common procedure for the design of these filters is to design a prototype low-pass filter using the methods described above, and then to transform the low-pass filter to the desired form by a substitution in the transfer function, that is we substitute a function g(s) for s in the low-pass transfer function Hlp (s), so that the new transfer function is H (s) = Hlp (g(s)). The effect is to modify the filter poles and zeros to produce the desired frequency response characteristic. | H ( j9 ) |2 1 R c R s 0 0 9 c 9 r 9 r a d /s e c ) ( a ) H ig h - p a s s | H ( j9 ) |2 1 R c R s 0 0 rl 9 9 c l 9 (b ) B a n d -p a s s c u 9 ru 9 r a d /s e c ) | H ( j9 ) |2 1 R R 0 c s 0 9 c l 9 rl (c ) B a n d -s to p 9 ru 9 c u 9 r a d /s e c ) The critical frequencies used in the design are as shown above. For band-pass and band-stop filters it is convenient to define a center frequency Ωo as the geometric mean of the pass-pand 8–4 edges, and a bandwidth ΔΩ: � Ωo = Ωcu Ωcl ΔΩ = Ωcu − Ωcl . The transformation formulas for a low-pass filter with cut-off frequency Ωc are given below Ωc 1 s Ωc 2 Ω2 Low-pass (Ωc ) → High-pass (Ωc ) g(s) = c s s2 + Ω2o Low-pass (Ωc = ΔΩ ) → Band-pass (Ωcl , Ωcu ) g(s) = s sΩ2c Low-pass (Ωc = ΔΩ ) → Band-stop (Ωcl , Ωcu ) g(s) = 2 s + Ω2o Low-pass (Ωc1 ) → Low-pass (Ωc2 ) g(s) = The band-pass and band-stop transformations both double the order of the filter, since s2 is involved it the transformation. The low-pass filter is designed to have a cut-off frequency Ωc = Ωcu − Ωcl . The above transformations will create an ideal gain characteristic from an ideal lowpass filter. For practical filters, however, the “skirts” of the pass-bands will be a warped representation of the low-pass prototype filter. This does not usually cause problems. Example 1 Transform the first-order low-pass filter Hlp (s) = Ωc s + Ωc to a high-pass filter Hhp (s). Using the transformation g(s) = Ω2c /s Hhp (s) = � Ω2c s Ω s �c = s + Ωc + Ωc Example 2 Transform the second-order low-pass Butterworth filter Hlp (s) = s2 + √ 8–5 Ω2c 2Ωc s + Ω2c to a high-pass filter Hhp (s). Using the transformation g(s) = Ω2c /s Hhp (s) = � � 2 2 Ωc s Ω2c s2 √ = � � √ 2 s2 + 2s + Ωc + 2 Ωsc + Ωc2 Example 3 Design a second-order bandpass filter with center frequency Ωo and bandwidth ΔΩ . Step 1: Design a first-order prototype low-pass filter with cut-off frequency ΔΩ : ΔΩ Hlp (s) = s + ΔΩ Step 2: Transform the prototype using g(s) = so that H(s) = � s2 + Ω2o s ΔΩ � s2 +Ω2o s = + ΔΩ s2 ΔΩ s + ΔΩ s + Ω2o Example 4 Design a second-order band-stop filter with center frequency Ωo and notch-width ΔΩ . Step 1: Design a first-order prototype low-pass filter with cut-off frequency ΔΩ : ΔΩ Hlp (s) = s + ΔΩ Step 2: Transform the prototype using g(s) = so that H(s) = � ΔΩ � 2 sΔΩ s2 +Ω2o sΔ2Ω s2 + Ω2o = + ΔΩ 8–6 s2 + Ω2 o s2 + ΔΩ s + Ω2o 3 State-Variable Active Filters Practical realizations of analog filters are usually based on factoring the transfer function into cascaded second-order sections, each based on a complex conjugate pole-pair or a pair of real poles, and a first-order section if the order is odd. Any zeros in the system may be distributed among the second- and first-order sections. Each first- and second-order section is then implemented by an active filter and connected in series. For example the third-order Butterworth high-pass filter H(s) = s3 s3 + 40s2 + 800s + 8000 H(s) = s s2 × 2 s + 20s + 400 s + 20 would be implemented as as shown below: s 3 + 4 0 s 2 s 3 s + 8 0 0 s + 8 0 0 0 (a ) 2 s 2 + 2 0 s + 4 0 0 s s + 2 0 (b ) The design of each low-order block can be handled independently. The state-variable filter design method is based on the block diagram representation used in the so-called phase-variable description of linear systems that uses the outputs of a chain of cascaded integrators as state variables. Consider a second-order filter block with a transfer function b2 s2 + b1 s + b0 Y (s) H(s) = = 2 U (s) s + a1 s + a0 and split H(s) into two sub-blocks representing the denominator and numerator by intro­ ducing an intermediate variable x and rewrite X(s) 1 = 2 U (s) s + a1 s + a0 Y (s) H2 (s) = = b2 s2 + b1 s + b0 X(s) so that H(s) = H2 (s)H1 (s). H1 (s) = The differential equations corresponding to H1 (s) and H2 (s) are dx d2 x + a0 x = u + a1 2 dt dt and y = b2 d2 x dx + b0 x. + b1 2 dt dt 8–7 The first equation may be rewritten explicitly in terms of the highest derivative d2 x dx = −a − a0 x + u. 1 dt2 dt (1) Consider a pair of cascaded analog integrators with the output defined as x(t) so that the derivatives of x(t) appear as inputs to the integrators: d d t 2 x 2 d x d t 1 s 1 x (t) s Note that Eq. (1) gives an explicit expression for the input to the first block in terms of the outputs of the two integrators and the system input, and therefore generates the block diagram for H1 (s) shown below: + u (t) d d t - - 2 2 x d x d t 1 s a 1 x (t) s a 1 0 The equation d2 x dx y = b2 2 + b1 + b0 x. dt dt shows that the output y(t) is a weighted sum of x(t) and its derivatives, leading to the complete second-order state variable filter block diagram: + b u (t) + - This basic structure may be choice of the numerator. Y1 (s) Hlp (s) = = U (s) Y2 (s) Hbp (s) = = U (s) Y3 (s) = Hhp (s) = U (s) Y4 (s) Hbs (s) = = U (s) b 2 - d 2 x d t 2 + + b 1 1 s d x d t a 1 y (t) + 0 1 x (t) s a 0 used to realize the four basic filter types by appropriate a0 + a1 s + a0 a1 s 2 s + a1 s + a0 s2 s2 + a1 s + a0 s2 + a0 s2 + a1 s + a0 s2 8–8 a unity gain low-pass filter (2) a unity gain band-pass filter (3) a unity gain high-pass filter (4) a unity gain band-stop filter (5) a a 0 U (s ) + - s 2 X (s ) 1 s a s X (s ) 1 s a X (s ) 1 8–9 0 a 0 1 + Y + 4 Y 3 Y Y 2 1 (s ) (b a n d -s to p ) ( s ) ( h ig h - p a s s ) (s ) (b a n d -p a s s ) ( s ) ( lo w - p a s s )