E¢ cient Implementation of MCMC When Using An Unbiased Likelihood Estimator
advertisement

E¢ cient Implementation of MCMC When Using An
Unbiased Likelihood Estimator
Michael Pitt
University of Oxford
Joint work with A. Doucet, G. Deligiannidis & R. Kohn
Cambridge, 22/04/14
(Cambridge, 22/04/14)
1 / 26
Organisation of the Talk
1
MCMC with intractable likehood functions.
In physics, …rst appeared in Lin, Liu & Sloan (2000). In statistics,
Beaumont (2003), Andrieu, Berthelesen, D., Roberts (2006), Andrieu
& Roberts (2009).
(Cambridge, 22/04/14)
2 / 26
Organisation of the Talk
1
MCMC with intractable likehood functions.
In physics, …rst appeared in Lin, Liu & Sloan (2000). In statistics,
Beaumont (2003), Andrieu, Berthelesen, D., Roberts (2006), Andrieu
& Roberts (2009).
2
Ine¢ ciency of the MCMC scheme with likelihood estimator against
known likelihood.
(Cambridge, 22/04/14)
2 / 26
Organisation of the Talk
1
MCMC with intractable likehood functions.
In physics, …rst appeared in Lin, Liu & Sloan (2000). In statistics,
Beaumont (2003), Andrieu, Berthelesen, D., Roberts (2006), Andrieu
& Roberts (2009).
2
Ine¢ ciency of the MCMC scheme with likelihood estimator against
known likelihood.
3
Guidelines on an optimal precision for the estimator of the
log-likelihood.
(Cambridge, 22/04/14)
2 / 26
Bayesian Inference
Likelihood function p (y ; θ ) where θ 2 Θ
(Cambridge, 22/04/14)
Rd .
3 / 26
Bayesian Inference
Likelihood function p (y ; θ ) where θ 2 Θ
Rd .
Prior distribution of density p (θ ) .
(Cambridge, 22/04/14)
3 / 26
Bayesian Inference
Likelihood function p (y ; θ ) where θ 2 Θ
Rd .
Prior distribution of density p (θ ) .
Bayesian inference relies on the posterior
π (θ ) = p ( θ j y ) = R
(Cambridge, 22/04/14)
p (y ; θ ) p ( θ )
.
p
y ; θ0 p θ0 d θ0
Θ
3 / 26
Bayesian Inference
Likelihood function p (y ; θ ) where θ 2 Θ
Rd .
Prior distribution of density p (θ ) .
Bayesian inference relies on the posterior
π (θ ) = p ( θ j y ) = R
p (y ; θ ) p ( θ )
.
p
y ; θ0 p θ0 d θ0
Θ
For non-trivial models, inference relies typically on MCMC.
(Cambridge, 22/04/14)
3 / 26
Metropolis-Hastings algorithm
Set ϑ(0 ) and iterate for i = 1, 2, ...
(Cambridge, 22/04/14)
4 / 26
Metropolis-Hastings algorithm
Set ϑ(0 ) and iterate for i = 1, 2, ...
1
Sample ϑ
q
(Cambridge, 22/04/14)
j ϑ (i
1)
.
4 / 26
Metropolis-Hastings algorithm
Set ϑ(0 ) and iterate for i = 1, 2, ...
1
Sample ϑ
2
Compute
q
j ϑ (i
α = 1^
(Cambridge, 22/04/14)
1)
.
q ϑ (i
p (y ; ϑ ) p ( ϑ )
p y ; ϑ (i
1)
p ϑ (i
1)
1)
q ϑ j ϑ (i
ϑ
1)
.
4 / 26
Metropolis-Hastings algorithm
Set ϑ(0 ) and iterate for i = 1, 2, ...
1
Sample ϑ
2
Compute
q
j ϑ (i
α = 1^
3
1)
.
q ϑ (i
p (y ; ϑ ) p ( ϑ )
p y ; ϑ (i
1)
p ϑ (i
1)
q ϑ j ϑ (i
With probability α, set ϑ(i ) := ϑ and ϑ(i ) := ϑ(i
(Cambridge, 22/04/14)
1)
1)
ϑ
1)
.
otherwise.
4 / 26
Intractable Likelihood Function
In numerous scenarios, p (y ; θ ) cannot be evaluated pointwise; e.g.
p (y ; θ ) =
Z
p (x, y ; θ ) dx
where the integral cannot be evaluated.
(Cambridge, 22/04/14)
5 / 26
Intractable Likelihood Function
In numerous scenarios, p (y ; θ ) cannot be evaluated pointwise; e.g.
p (y ; θ ) =
Z
p (x, y ; θ ) dx
where the integral cannot be evaluated.
A standard “solution” consists of using MCMC to sample from
p ( θ, x j y ) =
p (x, y ; θ ) p (θ )
p (y )
by updating iterately x and θ.
(Cambridge, 22/04/14)
5 / 26
Intractable Likelihood Function
In numerous scenarios, p (y ; θ ) cannot be evaluated pointwise; e.g.
p (y ; θ ) =
Z
p (x, y ; θ ) dx
where the integral cannot be evaluated.
A standard “solution” consists of using MCMC to sample from
p ( θ, x j y ) =
p (x, y ; θ ) p (θ )
p (y )
by updating iterately x and θ.
Gibbs sampling strategies can be slow mixing and di¢ cult to put in
practice.
(Cambridge, 22/04/14)
5 / 26
MCMC with Intractable Likelihood Function
Let p
b (y ; θ, U ) be an unbiased non-negative estimator of the
likelihood where U mθ ( ); i.e.
p (y ; θ ) =
(Cambridge, 22/04/14)
Z
U
p
b (y ; θ, u ) mθ (u ) du.
6 / 26
MCMC with Intractable Likelihood Function
Let p
b (y ; θ, U ) be an unbiased non-negative estimator of the
likelihood where U mθ ( ); i.e.
p (y ; θ ) =
Z
U
p
b (y ; θ, u ) mθ (u ) du.
Introduce a target distribution on Θ
π (θ, u ) = π (θ )
U of density
p
b (y ; θ, u )
p (θ ) p
b (y ; θ, u ) mθ (u )
mθ (u ) =
p (y ; θ )
p (y )
then unbiasedness yields
Z
(Cambridge, 22/04/14)
U
π (θ, u ) du = π (θ )
6 / 26
MCMC with Intractable Likelihood Function
Let p
b (y ; θ, U ) be an unbiased non-negative estimator of the
likelihood where U mθ ( ); i.e.
p (y ; θ ) =
Z
U
p
b (y ; θ, u ) mθ (u ) du.
Introduce a target distribution on Θ
π (θ, u ) = π (θ )
U of density
p
b (y ; θ, u )
p (θ ) p
b (y ; θ, u ) mθ (u )
mθ (u ) =
p (y ; θ )
p (y )
then unbiasedness yields
Z
U
π (θ, u ) du = π (θ )
Any MCMC algorithm sampling from π (θ, u ) yields samples from
π ( θ ).
(Cambridge, 22/04/14)
6 / 26
Pseudo-Marginal Metropolis-Hastings algorithm
Set ϑ(0 ) , U (0 )
(Cambridge, 22/04/14)
and iterate for i = 1, 2, ...
7 / 26
Pseudo-Marginal Metropolis-Hastings algorithm
1
Set ϑ(0 ) , U (0 )
and iterate for i = 1, 2, ...
Sample ϑ
j ϑ (i
q
(Cambridge, 22/04/14)
1)
,U
mϑ ( ) to obtain p
b (y ; ϑ, U ).
7 / 26
Pseudo-Marginal Metropolis-Hastings algorithm
Set ϑ(0 ) , U (0 )
and iterate for i = 1, 2, ...
1
Sample ϑ
j ϑ (i
2
Compute
q
α = 1^
(Cambridge, 22/04/14)
1)
,U
p
b (y ; ϑ, U )
p
b y ; ϑ (i
1)
, U (i
mϑ ( ) to obtain p
b (y ; ϑ, U ).
p (ϑ )
1)
p ϑ (i
1)
q ϑ (i
1)
q ϑ j ϑ (i
ϑ
1)
7 / 26
Pseudo-Marginal Metropolis-Hastings algorithm
Set ϑ(0 ) , U (0 )
and iterate for i = 1, 2, ...
1
Sample ϑ
j ϑ (i
2
Compute
q
α = 1^
3
1)
,U
p
b (y ; ϑ, U )
p
b y ; ϑ (i
1)
, U (i
mϑ ( ) to obtain p
b (y ; ϑ, U ).
p (ϑ )
1)
p ϑ (i
With proba α, set ϑ(i ) , p
b y ; ϑ (i ) , U (i )
where you are otherwise.
(Cambridge, 22/04/14)
1)
q ϑ (i
1)
q ϑ j ϑ (i
ϑ
1)
:= (ϑ, p
b (y ; ϑ, U )) and stay
7 / 26
Importance Sampling Estimator
For latent variable models, one has
p (y ; θ ) =
Z
p (x, y ; θ ) dx =
Z
p (x, y ; θ )
qθ (x )dx
qθ (x )
where qθ (x ) is an importance sampling density.
(Cambridge, 22/04/14)
8 / 26
Importance Sampling Estimator
For latent variable models, one has
p (y ; θ ) =
Z
p (x, y ; θ ) dx =
Z
p (x, y ; θ )
qθ (x )dx
qθ (x )
where qθ (x ) is an importance sampling density.
An unbiased estimator is given by
p
b(y ; θ, U ) =
(Cambridge, 22/04/14)
1
N
p Xk, y; θ
∑ qθ (X k ) ,
k =1
N
Xk
i.i.d.
qθ ( )
8 / 26
Importance Sampling Estimator
For latent variable models, one has
p (y ; θ ) =
Z
p (x, y ; θ ) dx =
Z
p (x, y ; θ )
qθ (x )dx
qθ (x )
where qθ (x ) is an importance sampling density.
An unbiased estimator is given by
p
b(y ; θ, U ) =
1
N
p Xk, y; θ
∑ qθ (X k ) ,
k =1
N
Here U := X 1 , ..., X N and mθ (u ) =
(Cambridge, 22/04/14)
Xk
∏ k =1 qθ
N
i.i.d.
qθ ( )
xk .
8 / 26
Importance Sampling Estimator
For latent variable models, one has
p (y ; θ ) =
Z
p (x, y ; θ ) dx =
Z
p (x, y ; θ )
qθ (x )dx
qθ (x )
where qθ (x ) is an importance sampling density.
An unbiased estimator is given by
p
b(y ; θ, U ) =
1
N
p Xk, y; θ
∑ qθ (X k ) ,
k =1
N
Here U := X 1 , ..., X N and mθ (u ) =
Xk
∏ k =1 qθ
N
i.i.d.
qθ ( )
xk .
Whatever being N 1, the pseudo-marginal MH admits π (θ ) as
invariant distribution.
(Cambridge, 22/04/14)
8 / 26
Sequential Monte Carlo Estimator
fXt gt 0 is a X-valued latent Markov process with X0
Xt +1 jXt
f ( j Xt ; θ ).
(Cambridge, 22/04/14)
µ( ; θ ) and
9 / 26
Sequential Monte Carlo Estimator
fXt gt 0 is a X-valued latent Markov process with X0 µ( ; θ ) and
Xt +1 jXt
f ( j Xt ; θ ).
Observations fYt gt 1 are conditionally independent given fXt gt 0
with Yt j fXk gk 0 g ( jXt , θ ).
(Cambridge, 22/04/14)
9 / 26
Sequential Monte Carlo Estimator
fXt gt 0 is a X-valued latent Markov process with X0 µ( ; θ ) and
Xt +1 jXt
f ( j Xt ; θ ).
Observations fYt gt 1 are conditionally independent given fXt gt 0
with Yt j fXk gk 0 g ( jXt , θ ).
Likelihood of y1:T = (y1 , ..., yT ) is
p (y1:T ; θ ) =
(Cambridge, 22/04/14)
Z
XT +1
p (x0:T , y1:T ; θ )dx0:T .
9 / 26
Sequential Monte Carlo Estimator
fXt gt 0 is a X-valued latent Markov process with X0 µ( ; θ ) and
Xt +1 jXt
f ( j Xt ; θ ).
Observations fYt gt 1 are conditionally independent given fXt gt 0
with Yt j fXk gk 0 g ( jXt , θ ).
Likelihood of y1:T = (y1 , ..., yT ) is
p (y1:T ; θ ) =
Z
XT +1
p (x0:T , y1:T ; θ )dx0:T .
SMC provides an unbiased estimator of relative variance O (T /N )
where N is the number of particles.
(Cambridge, 22/04/14)
9 / 26
Sequential Monte Carlo Estimator
fXt gt 0 is a X-valued latent Markov process with X0 µ( ; θ ) and
Xt +1 jXt
f ( j Xt ; θ ).
Observations fYt gt 1 are conditionally independent given fXt gt 0
with Yt j fXk gk 0 g ( jXt , θ ).
Likelihood of y1:T = (y1 , ..., yT ) is
p (y1:T ; θ ) =
Z
XT +1
p (x0:T , y1:T ; θ )dx0:T .
SMC provides an unbiased estimator of relative variance O (T /N )
where N is the number of particles.
Whatever being N 1, the pseudo-marginal MH admits π (θ ) as
invariant distribution.
(Cambridge, 22/04/14)
9 / 26
A Nonlinear State-Space Model
Standard non-linear model
Xt =
1
2 Xt 1
Yt =
1
2
20 Xt
(Cambridge, 22/04/14)
+ 25 1 +XXt 21 + 8 cos(1.2t ) + Vt ,
+ Wt ,
t 1
Wt
i.i.d.
Vt
i.i.d.
N 0, σ2V ,
N 0, σ2W .
10 / 26
A Nonlinear State-Space Model
Standard non-linear model
Xt =
1
2 Xt 1
Yt =
1
2
20 Xt
+ 25 1 +XXt 21 + 8 cos(1.2t ) + Vt ,
+ Wt ,
t 1
Wt
i.i.d.
Vt
i.i.d.
N 0, σ2V ,
N 0, σ2W .
T = 200 data points with θ = σ2V , σ2W = (10, 10).
(Cambridge, 22/04/14)
10 / 26
A Nonlinear State-Space Model
Standard non-linear model
Xt =
1
2 Xt 1
Yt =
1
2
20 Xt
+ 25 1 +XXt 21 + 8 cos(1.2t ) + Vt ,
+ Wt ,
t 1
Wt
i.i.d.
Vt
i.i.d.
N 0, σ2V ,
N 0, σ2W .
T = 200 data points with θ = σ2V , σ2W = (10, 10).
Di¢ cult to perform standard MCMC as p ( x1:T j y1:T , θ ) is highly
multimodal.
(Cambridge, 22/04/14)
10 / 26
A Nonlinear State-Space Model
Standard non-linear model
Xt =
1
2 Xt 1
Yt =
1
2
20 Xt
+ 25 1 +XXt 21 + 8 cos(1.2t ) + Vt ,
+ Wt ,
t 1
Wt
i.i.d.
Vt
i.i.d.
N 0, σ2V ,
N 0, σ2W .
T = 200 data points with θ = σ2V , σ2W = (10, 10).
Di¢ cult to perform standard MCMC as p ( x1:T j y1:T , θ ) is highly
multimodal.
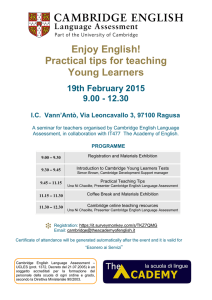
We sample from p ( θ j y1:T ) using a random walk pseudo-marginal
MH where p (y1:T ; θ ) is estimated using SMC with N particles.
(Cambridge, 22/04/14)
10 / 26
A Nonlinear State-Space Model
σ
σ
V
1.0
N=96, T=200
W
σ
σ
V
W
N=96, T=200
3
0.5
2
0
σ
200
V
σ
400
600
800
1000
N=600, T=200
W
0.0
1.0
0
100
200
σ
3
300
σ
V
W
400
500
N=600, T=200
0.5
2
0.0
0
200
σ
400
σ
V
600
800
0
1000
50
100
150
200
N=6667, T=200
W
1.0
3
σ
σ
V
W
N=6667, T=200
0.5
2
0
200
400
600
Figure: Autocorrelation of
(Cambridge, 22/04/14)
800
n
(i )
σV
1000
o
0.0
and
0
n
(i )
σW
50
o
100
150
200
of the MH sampler for various N.
11 / 26
How to Select the Number of Samples
A key issue from a practical point of view is how to select N?
(Cambridge, 22/04/14)
12 / 26
How to Select the Number of Samples
A key issue from a practical point of view is how to select N?
If N is too small, then the algorithm mixes poorly and will require
many MCMC iterations.
(Cambridge, 22/04/14)
12 / 26
How to Select the Number of Samples
A key issue from a practical point of view is how to select N?
If N is too small, then the algorithm mixes poorly and will require
many MCMC iterations.
If N is too large, then each MCMC iteration is expensive.
(Cambridge, 22/04/14)
12 / 26
Pseudo-Marginal Metropolis-Hastings algorithm
Consider the error in the log-likelihood estimator
Z = log p
b (y ; θ, U )
(Cambridge, 22/04/14)
log p (y ; θ )
gθ ( )
13 / 26
Pseudo-Marginal Metropolis-Hastings algorithm
Consider the error in the log-likelihood estimator
Z = log p
b (y ; θ, U )
log p (y ; θ )
gθ ( )
In the (θ, Z ) parameterization, the target is
π (θ, u ) = π (θ )
(Cambridge, 22/04/14)
p
b (y ; θ, u )
mθ (u ) ) π (θ, z ) = π (θ ) exp(z )gθ (z ).
p (y ; θ )
13 / 26
Pseudo-Marginal Metropolis-Hastings algorithm
Consider the error in the log-likelihood estimator
Z = log p
b (y ; θ, U )
log p (y ; θ )
gθ ( )
In the (θ, Z ) parameterization, the target is
π (θ, u ) = π (θ )
p
b (y ; θ, u )
mθ (u ) ) π (θ, z ) = π (θ ) exp(z )gθ (z ).
p (y ; θ )
The pseudo-marginal MH algorithm is
Q f(θ, z ) , (d ϑ, dw )g = q (ϑ jθ )gϑ (w ) min f1, r (θ, ϑ ) exp (w
+ 1
z )g d ϑdw
$Q (θ, z ) δ(θ,z ) (d ϑ, dw )
where r (θ, ϑ ) = π (ϑ )q (θ jϑ )/ fπ (θ )q (ϑ jθ )g .
(Cambridge, 22/04/14)
13 / 26
Ine¢ ciency Measure
Consider the Markov chain fθ i , Zi g of transition Q with invariant
distribution π (θ, z ) and h : Θ ! R. De…ne
π (h) := Eπ [h(θ )]
(Cambridge, 22/04/14)
and
b n (h ) = n
π
1
n
∑ h ( θ i ).
i =1
14 / 26
Ine¢ ciency Measure
Consider the Markov chain fθ i , Zi g of transition Q with invariant
distribution π (θ, z ) and h : Θ ! R. De…ne
π (h) := Eπ [h(θ )]
and
b n (h ) = n
π
1
n
∑ h ( θ i ).
i =1
Proposition (KV 1986). If fθ i , Zi g is stationary and ergodic,
Vπ [h(θ )] < ∞ and
IFhQ := 1 + 2
∞
∑ corrπ,Q fh (θ 0 ) , h (θ τ )g
τ =1
then
p
b n (h )
n fπ
(Cambridge, 22/04/14)
π (h)g ! N 0, Vπ [h(θ )] IFhQ .
14 / 26
Ine¢ ciency Measure
Consider the Markov chain fθ i , Zi g of transition Q with invariant
distribution π (θ, z ) and h : Θ ! R. De…ne
π (h) := Eπ [h(θ )]
and
b n (h ) = n
π
1
n
∑ h ( θ i ).
i =1
Proposition (KV 1986). If fθ i , Zi g is stationary and ergodic,
Vπ [h(θ )] < ∞ and
IFhQ := 1 + 2
∞
∑ corrπ,Q fh (θ 0 ) , h (θ τ )g
τ =1
then
p
b n (h )
n fπ
π (h)g ! N 0, Vπ [h(θ )] IFhQ .
The Integrated Autocorrelation Time IFhQ is a measure of
ine¢ ciency of Q which we want to minimize for a …xed
computational budget.
(Cambridge, 22/04/14)
14 / 26
Aim of the Analysis
Simplifying Assumption: The noise Z is independent of θ and
Gaussian; i.e. Z
N
σ2 /2; σ2 :
π (θ, z ) = π (θ ) exp (z ) g (z ) = π (θ ) N z; σ2 /2; σ2 .
|
{z
}
π Z (z )
(Cambridge, 22/04/14)
15 / 26
Aim of the Analysis
Simplifying Assumption: The noise Z is independent of θ and
Gaussian; i.e. Z
N
σ2 /2; σ2 :
π (θ, z ) = π (θ ) exp (z ) g (z ) = π (θ ) N z; σ2 /2; σ2 .
|
{z
}
π Z (z )
Aim: Minimize the computational cost
CThQ (σ ) = IFhQ (σ) /σ2
as σ2 ∝ 1/N and computational e¤orts proportional to N.
(Cambridge, 22/04/14)
15 / 26
Aim of the Analysis
Simplifying Assumption: The noise Z is independent of θ and
Gaussian; i.e. Z
N
σ2 /2; σ2 :
π (θ, z ) = π (θ ) exp (z ) g (z ) = π (θ ) N z; σ2 /2; σ2 .
|
{z
}
π Z (z )
Aim: Minimize the computational cost
CThQ (σ ) = IFhQ (σ) /σ2
as σ2 ∝ 1/N and computational e¤orts proportional to N.
Special cases:
(Cambridge, 22/04/14)
15 / 26
Aim of the Analysis
Simplifying Assumption: The noise Z is independent of θ and
Gaussian; i.e. Z
N
σ2 /2; σ2 :
π (θ, z ) = π (θ ) exp (z ) g (z ) = π (θ ) N z; σ2 /2; σ2 .
|
{z
}
π Z (z )
Aim: Minimize the computational cost
CThQ (σ ) = IFhQ (σ) /σ2
as σ2 ∝ 1/N and computational e¤orts proportional to N.
Special cases:
1
When q (ϑ jθ ) = p ( ϑ j y ), σopt = 0.92 (Pitt et al., 2012).
(Cambridge, 22/04/14)
15 / 26
Aim of the Analysis
Simplifying Assumption: The noise Z is independent of θ and
Gaussian; i.e. Z
N
σ2 /2; σ2 :
π (θ, z ) = π (θ ) exp (z ) g (z ) = π (θ ) N z; σ2 /2; σ2 .
|
{z
}
π Z (z )
Aim: Minimize the computational cost
CThQ (σ ) = IFhQ (σ) /σ2
as σ2 ∝ 1/N and computational e¤orts proportional to N.
Special cases:
1
When q (ϑ jθ ) = p ( ϑ j y ), σopt = 0.92 (Pitt et al., 2012).
2
When π (θ ) =
d
∏ f (θ i ) and q (ϑjθ ) is an isotropic Gaussian random
i =1
walk then, as d ! ∞, σopt = 1.81 (Sherlock et al., 2013).
(Cambridge, 22/04/14)
15 / 26
Sketch of the Analysis
For general proposals and targets, direct minimization of
CThQ (σ) = IFhQ (σ) /σ2 impossible so minimize an upper bound over
it.
(Cambridge, 22/04/14)
16 / 26
Sketch of the Analysis
For general proposals and targets, direct minimization of
CThQ (σ) = IFhQ (σ) /σ2 impossible so minimize an upper bound over
it.
We introduce an auxiliary π (θ, z ) reversible kernel
Q f(θ, z ) , (d ϑ, dw )g = q (ϑ jθ )g (w )αEX (θ, ϑ ) αZ (z, w ) d ϑdw
+ f1
$EX (θ ) $Z (z )g δ(θ,z ) (d ϑ, dw )
where
αEX (θ, ϑ ) = min f1, r (θ, ϑ )g , αZ (z, w ) = min f1, exp (w
(Cambridge, 22/04/14)
z )g
16 / 26
Sketch of the Analysis
For general proposals and targets, direct minimization of
CThQ (σ) = IFhQ (σ) /σ2 impossible so minimize an upper bound over
it.
We introduce an auxiliary π (θ, z ) reversible kernel
Q f(θ, z ) , (d ϑ, dw )g = q (ϑ jθ )g (w )αEX (θ, ϑ ) αZ (z, w ) d ϑdw
+ f1
$EX (θ ) $Z (z )g δ(θ,z ) (d ϑ, dw )
where
αEX (θ, ϑ ) = min f1, r (θ, ϑ )g , αZ (z, w ) = min f1, exp (w
Peskun’s theorem (1973) guarantees that IFhQ (σ)
CThQ (σ) CThQ (σ).
(Cambridge, 22/04/14)
z )g
IFhQ (σ) so that
16 / 26
A Bounding Chain
The Q chain can be interpreted in the following two step procedure
(Cambridge, 22/04/14)
17 / 26
A Bounding Chain
The Q chain can be interpreted in the following two step procedure
Let (θ, Z ) be the current state of the Markov chain.
(Cambridge, 22/04/14)
17 / 26
A Bounding Chain
The Q chain can be interpreted in the following two step procedure
Let (θ, Z ) be the current state of the Markov chain.
1
Propose ϑ
(Cambridge, 22/04/14)
q (ϑ jθ ) and w
g ( ; ϑ ).
17 / 26
A Bounding Chain
The Q chain can be interpreted in the following two step procedure
Let (θ, Z ) be the current state of the Markov chain.
q (ϑ jθ ) and w
g ( ; ϑ ).
1
Propose ϑ
2
Accept ϑ w.p. αEX (θ; ϑ ) = 1 ^
(Cambridge, 22/04/14)
π (ϑ ) q ( θ jϑ )
.
π (θ ) q ( ϑ jθ )
17 / 26
A Bounding Chain
The Q chain can be interpreted in the following two step procedure
Let (θ, Z ) be the current state of the Markov chain.
q (ϑ jθ ) and w
g ( ; ϑ ).
1
Propose ϑ
2
Accept ϑ w.p. αEX (θ; ϑ ) = 1 ^
3
π (ϑ ) q ( θ jϑ )
.
π (θ ) q ( ϑ jθ )
Accept w w.p. αZ (z; w ) = 1 ^ exp(w
(Cambridge, 22/04/14)
z ).
17 / 26
A Bounding Chain
The Q chain can be interpreted in the following two step procedure
Let (θ, Z ) be the current state of the Markov chain.
q (ϑ jθ ) and w
g ( ; ϑ ).
1
Propose ϑ
2
Accept ϑ w.p. αEX (θ; ϑ ) = 1 ^
3
4
π (ϑ ) q ( θ jϑ )
.
π (θ ) q ( ϑ jθ )
Accept w w.p. αZ (z; w ) = 1 ^ exp(w
z ).
(ϑ, w ) is accepted if and only if there is acceptance in both criteria.
(Cambridge, 22/04/14)
17 / 26
Sketch of the Analysis
Let (θ i , Zi )i
1
(Cambridge, 22/04/14)
be generated by Q .
18 / 26
Sketch of the Analysis
Let (θ i , Zi )i
1
ei
Denote e
θi , Z
be generated by Q .
i 1
sojourn times; i.e.
the accepted proposals and (τ i )i
e
e1 = (θ 1 , Z1 ) =
θ1 , Z
e
e2 = (θ τ1+1 , Zτ1 +1 ) =
θ2 , Z
e
ei +1 6= e
ei
θ i +1 , Z
θi , Z
(Cambridge, 22/04/14)
1
the associated
= ( θ τ 1 , Zτ 1 ),
= (θ τ2 , Zτ2 ) and so on where
a.s.
18 / 26
Sketch of the Analysis
Let (θ i , Zi )i
1
ei
Denote e
θi , Z
be generated by Q .
i 1
sojourn times; i.e.
the accepted proposals and (τ i )i
e
e1 = (θ 1 , Z1 ) =
θ1 , Z
e
e2 = (θ τ1+1 , Zτ1 +1 ) =
θ2 , Z
e
ei +1 6= e
ei
θ i +1 , Z
θi , Z
the associated
= ( θ τ 1 , Zτ 1 ),
= (θ τ2 , Zτ2 ) and so on where
a.s.
Q
IFhQ (σ) can be re-expressed in terms of IFh/J($
QJ f(θ, z ) , (d ϑ, dw )g =
(Cambridge, 22/04/14)
1
EX $Z )
(σ) where
q (d ϑ jθ )αEX (θ, ϑ ) g (dw )αZ (z, w )
$EX (θ )
$Z (z )
18 / 26
Sketch of the Analysis
Let (θ i , Zi )i
1
ei
Denote e
θi , Z
be generated by Q .
i 1
sojourn times; i.e.
the accepted proposals and (τ i )i
e
e1 = (θ 1 , Z1 ) =
θ1 , Z
e
e2 = (θ τ1+1 , Zτ1 +1 ) =
θ2 , Z
e
ei +1 6= e
ei
θ i +1 , Z
θi , Z
1
the associated
= ( θ τ 1 , Zτ 1 ),
= (θ τ2 , Zτ2 ) and so on where
a.s.
Q
IFhQ (σ) can be re-expressed in terms of IFh/J($
QJ f(θ, z ) , (d ϑ, dw )g =
EX $Z )
(σ) where
q (d ϑ jθ )αEX (θ, ϑ ) g (dw )αZ (z, w )
$EX (θ )
$Z (z )
Proof exploits spectral representations of these kernels + Positivity of
QJZ (z, dw ).
(Cambridge, 22/04/14)
18 / 26
Main Results
Proposition:
IFhQ (σ)
IFhEX
IFhQ (σ)
IFhEX
1
2
1+
1
IFhEX
1 + IF Z (σ)
1
IFhEX
and the bound is tight as IFhEX ! 1 or σ ! 0.
As IFJEX
! ∞,
,h/$
EX
IFhQ (σ)
1
! σ
.
EX
π Z ($Z (σ))
IFh
(Cambridge, 22/04/14)
19 / 26
Main Results
Proposition:
IFhQ (σ)
IFhEX
IFhQ (σ)
IFhEX
1
2
1+
1
IFhEX
1 + IF Z (σ)
1
IFhEX
and the bound is tight as IFhEX ! 1 or σ ! 0.
As IFJEX
! ∞,
,h/$
EX
IFhQ (σ)
1
! σ
.
EX
π Z ($Z (σ))
IFh
Results used to minimize w.r.t σ upper bounds on
CThQ (σ) = IFhQ (σ) /σ2 .
(Cambridge, 22/04/14)
19 / 26
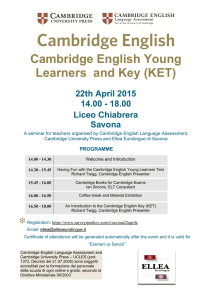
Bounds on Relative Computational Costs
30
R
R
R
R
20
C
C
C
C
T
T
T
T
against
σ
, IFEX=4
EX
,
I
F
=
40
h
Z
(2 )
h
(2 )
R C T h (2 ), I F E X = 2
R C T h (2 ), I F E X = 1 0
R C T h (2 ), I F E X = 1 0 6
10
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
30
R C T Z against
σ
R C T h (3 ), I F JE X = 4
R C T h (3 ), I F JE X = 4 0
RCT
20
R C T h (3 ), I F J E X = 2
R C T h (3 ), I F J E X = 1 0
R C T h (3 ), I F J E X = 1 0 6
10
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
Figure: Bounds on IFhQ (σ) / σ2 IFhEX
(Cambridge, 22/04/14)
20 / 26
Practical Guidelines
For good proposals, select σ
σ 1.7.
(Cambridge, 22/04/14)
1 whereas for poor proposals, select
21 / 26
Practical Guidelines
For good proposals, select σ
σ 1.7.
1 whereas for poor proposals, select
When you have no clue about the proposal e¢ ciency,
(Cambridge, 22/04/14)
21 / 26
Practical Guidelines
For good proposals, select σ
σ 1.7.
1 whereas for poor proposals, select
When you have no clue about the proposal e¢ ciency,
1
If σopt = 1 and you pick σ = 1.7, computing time increases by
150%.
(Cambridge, 22/04/14)
21 / 26
Practical Guidelines
For good proposals, select σ
σ 1.7.
1 whereas for poor proposals, select
When you have no clue about the proposal e¢ ciency,
1
If σopt = 1 and you pick σ = 1.7, computing time increases by
150%.
2
If σopt = 1.7 and you pick σ = 1, computing time increases by
(Cambridge, 22/04/14)
50%.
21 / 26
Practical Guidelines
For good proposals, select σ
σ 1.7.
1 whereas for poor proposals, select
When you have no clue about the proposal e¢ ciency,
1
If σopt = 1 and you pick σ = 1.7, computing time increases by
150%.
2
If σopt = 1.7 and you pick σ = 1, computing time increases by
3
If σopt = 1 or σopt = 1.7 and you pick σ = 1.2, computing time
increases by 15%.
(Cambridge, 22/04/14)
50%.
21 / 26
Example: Noisy Autoregressive Example
Consider
Xt = µ(1
φ) + φXt + Vt ,
Yt = Xt + Wt ,
Wt
i.i.d.
Vt
i.i.d.
N 0, σ2η ,
N 0, σ2ε ,
where θ = φ, µ, σ2η .
(Cambridge, 22/04/14)
22 / 26
Example: Noisy Autoregressive Example
Consider
Xt = µ(1
φ) + φXt + Vt ,
Yt = Xt + Wt ,
Wt
i.i.d.
Vt
i.i.d.
N 0, σ2η ,
N 0, σ2ε ,
where θ = φ, µ, σ2η .
Likelihood can be computed exactly using Kalman.
(Cambridge, 22/04/14)
22 / 26
Example: Noisy Autoregressive Example
Consider
Xt = µ(1
φ) + φXt + Vt ,
Yt = Xt + Wt ,
Wt
i.i.d.
Vt
i.i.d.
N 0, σ2η ,
N 0, σ2ε ,
where θ = φ, µ, σ2η .
Likelihood can be computed exactly using Kalman.
Autoregressive Metropolis proposal of coe¢ cient ρ for ϑ based on
multivariate t-distribution.
(Cambridge, 22/04/14)
22 / 26
Example: Noisy Autoregressive Example
Consider
Xt = µ(1
φ) + φXt + Vt ,
Yt = Xt + Wt ,
Wt
i.i.d.
Vt
i.i.d.
N 0, σ2η ,
N 0, σ2ε ,
where θ = φ, µ, σ2η .
Likelihood can be computed exactly using Kalman.
Autoregressive Metropolis proposal of coe¢ cient ρ for ϑ based on
multivariate t-distribution.
N is selected so as to obtain σ θ
(Cambridge, 22/04/14)
constant where θ posterior mean.
22 / 26
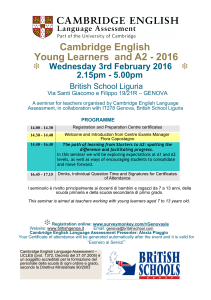
Empirical vs Asymptotic Distribution of Log-Likelihood
Estimator
0.5
ρ =0
Probitexample:N=120,
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
-4
0.5
-2
0
2
4
-4
ρ =0.50
AR1 plus noiseexample:N=60,
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
-4
-2
0
2
4
ρ = 0 .9 7
Probitexample:N=120,
-2
0
2
4
ρ = 0 .9
AR1 plus noiseexample:N=60,
-4
-2
0
2
4
Figure: Histograms of proposed (red) and accepted (pink) values of Z in
PMCMC scheme. Overlayed are Gaussian pdfs from our simplifying Assumption
for a target of σ = 0.92.
(Cambridge, 22/04/14)
23 / 26
Relative Ine¢ ciency and Computing Time
ρ =0
RCT
500
500
250
250
0
100
ρ = 0 .4
200
300
RCT
500
2
100
ρ = 0 .6
200
300
0
1
2
500
50
250
25
100
200
300
500
250
0
100
1
2
RCT
RCT
200
300
300
50
250
25
1
2
100
200
300
RIF
2
RIF
1
50
2
RIF
25
0
500
1
50
25
0
250
ρ = 0 .9
200
25
500
0
100
RIF
RCT
RCT
RIF
25
50
RCT
250
0
50
RIF
25
1
500
250
50
RCT
100
200
300
RIF
1
50
2
RIF
25
0
100
200
300
1
2
Figure: From left to right: RCThQ vs N, RCThQ vs σ(θ ), RIFhQ against N and
RIFhQ against σ(θ ) for various values of ρ and di¤erent parameters.
(Cambridge, 22/04/14)
24 / 26
Acceptance Probability
0.75
0.75
Pr(Accept) of Ex act
Pr(Accept) of Particle MH
Pr(Accept) of Bo und
Pr(Accept) of Ex act
Pr(Accept) of Particle MH
Pr(Accept) of Bo und
0.50
0.50
ρ=0
0.25
0.5
ρ = 0 .4
0.25
1.0
1.5
2.0
0.75
0.5
1.0
0.75
2.0
Pr(Accept) of Ex act
Pr(Accept) of Particle MH
Pr(Accept) of Bo und
Pr(Accept) of Ex act
Pr(Accept) of Particle MH
Pr(Accept) of Bo und
0.50
1.5
0.50
ρ = 0 .6
0.25
0.5
ρ = 0 .9
0.25
1.0
1.5
2.0
0.5
1.0
1.5
2.0
(Cambridge,
22/04/14) probability against σ.Theoretical (upper bound) vs Actual.
25 / 26
Figure:
Acceptance
Discussion
Simpli…ed quantitative analysis of pseudo-marginal MCMC.
(Cambridge, 22/04/14)
26 / 26
Discussion
Simpli…ed quantitative analysis of pseudo-marginal MCMC.
1
Much weaker assumptions than previous work on proposal and target.
(Cambridge, 22/04/14)
26 / 26
Discussion
Simpli…ed quantitative analysis of pseudo-marginal MCMC.
1
Much weaker assumptions than previous work on proposal and target.
2
Assumption on orthogonality of the noise.
(Cambridge, 22/04/14)
26 / 26
Discussion
Simpli…ed quantitative analysis of pseudo-marginal MCMC.
1
Much weaker assumptions than previous work on proposal and target.
2
Assumption on orthogonality of the noise.
For good proposals, select σ
σ 1.7.
(Cambridge, 22/04/14)
1 whereas for poor proposals, select
26 / 26
Discussion
Simpli…ed quantitative analysis of pseudo-marginal MCMC.
1
Much weaker assumptions than previous work on proposal and target.
2
Assumption on orthogonality of the noise.
For good proposals, select σ
σ 1.7.
1 whereas for poor proposals, select
In scenarios where the proposal e¢ ciency is unknown, select σ
(Cambridge, 22/04/14)
1.2.
26 / 26