6.301 Solid-State Circuits
advertisement

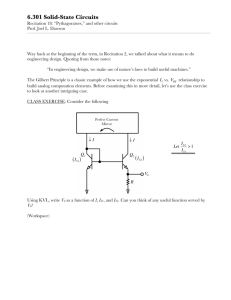
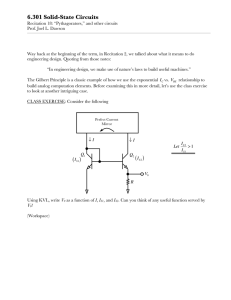
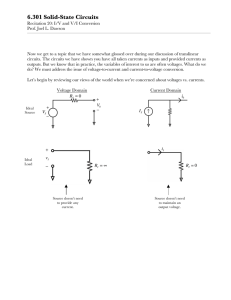
6.301 Solid-State Circuits Recitation 19: More on Translinear Circuits Prof. Joel L. Dawson We’re going to continue today with more on “Pythagorators,” and then talk about an industry design: The LH0091 True RMS to DC converter. It’s a very interesting application of some of these translinear ideas. In the middle of the class, though, we’ll try our hand at a small translinear design problem. Five-Transistor Pythagorator I0 Ix ↓ Q3 Q2 2AE ↓ Iy Q5 Q4 Q1 2AE What is I 0 in terms of I x and I y ? Well, we see a Gilbert loop right away in Q1 − Q4 . Must use the more general form: Ix I I I3 + Iy ⋅ x = 3 2AE 2AE AE AE ( 1 4 ( Ix2 = I3 I3 + Iy ) ) 6.301 Solid-State Circuits Recitation 19: More on Translinear Circuits Prof. Joel L. Dawson Need the relationship between I 3 and other variables of interest. We can write I0 = I3 + I5 Q4 and Q5 form a current mirror (which, incidentally, is the simplest possible Gilbert loop): I5 = I4 = I3 + I y I 0 = 2I 3 + I y ⇒ I 3 = I0 − I y 2 Substituting back into our first expression: 1 4 ⎛ I0 − I y ⎞ ⎛ I0 − I y ⎞ I x 2 = ⎜ + Iy ⎟ ⎟ ⎜ ⎝ 2 ⎠⎝ 2 ⎠ = 1 4 (I 2 0 ) − 2I y I 0 + I y 2 + 12 I 0 I y − 12 I y 2 2 I x2 I02 I y = − = 4 4 4 1 4 (I 2 0 − I y2 ) I02 = I x2 + I y2 ⇒ I0 = I x2 + I y2 Question of the day: How did someone come up with that? Now let’s try some on our own. Page 2 6.301 Solid-State Circuits Recitation 19: More on Translinear Circuits Prof. Joel L. Dawson CLASS EXERCISE 1 (to be worked on individually): Design a translinear circuit that performs the function i0 = 4 ⋅ ii (Workspace) CLASS EXERCISE 2 (to be worked on in pairs): Design a translinear circuit that gives the following input-output relation: i0 = ki 3 Page 3 6.301 Solid-State Circuits Recitation 19: More on Translinear Circuits Prof. Joel L. Dawson Now let’s turn our attention to National’s LH0091 True RMS to DC converter. It is called this because its output is v0 = 1 RC ∫v 2 I dt To see how this happens, turn your attention to Q1 − Q4 indicated on the schematic: v0 vI R R Q1 i4 i3 − + Q4 Q2 Q3 See the Gilbert loop? I1 I 2 = I 3 I 4 But I1 = I 2 = vI R , and I 4 = v0 R . This gives vI R 2 2 = i3 ( ) . v0 R Looking back at the schematic, we can tie v0 and i3 together: C i3 C − + v0 Page 4 dv0 dt v0 = = i3 1 C ∫ i dt 3 6.301 Solid-State Circuits Recitation 19: More on Translinear Circuits Prof. Joel L. Dawson So now we can fully analyze the circuit: 2 vI v = i3 0 R R Integrate both sides 1 R2 ∫v 2 I dt = 1 i3v0 dt R∫ Now assume v0 changes slowly compared to vI , so that we can write 1 R2 ∫v 1 R2 ∫v v0 = 2 I dt = 2 I v0 i3dt R∫ dt = v0 Cv0 R 1 2 vI dt ∫ RC Page 5 MIT OpenCourseWare http://ocw.mit.edu 6.301 Solid-State Circuits Fall 2010 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.