Analysis for three-dimensional pipe structures by group relaxation by Nicholas Bassar
advertisement

Analysis for three-dimensional pipe structures by group relaxation
by Nicholas Bassar
A THESIS Submitted to the Graduate Committee in partial fulfillment of the requirements for the
degree of Master of Science in Givil Engineering at Montana State College
Montana State University
© Copyright by Nicholas Bassar (1949)
Abstract:
The group relaxation procedure for determining moments and reactions at the fixed ends of a
three-dimensional pipe structure subjected to expansion resulting from temperature change utilizes
principles of the neutral point method and the moment distribution process. The given pipe structure is
subdivided into groups or system such that each system has one terminal that is common to all systems
and the other terminal a fixed end. This subdivision has the advantage of requiring only the control of S
degrees of freedom of the common terminal during the solution. Before permitting expansion the
common terminal is restrained against rotation in each plane and against translation in each direction.
When expan-sion occurs, moments throughout the structure, end reactions and restraints at the common
terminal are induced.
The restraints at joint B may be released by either of two methods as follows: (1) By first allowing
rotational equilibrium to occur and then releasing the restraints against translation. (2) By releasing the
restraints against translation first and then allowing rotational equilibrium to occur* but balancing
shears each time the common terminal rotates.
In Appendix II the six neutral point equations are derived and are used to provide the following items
needed to perform the moment distribution process and to eliminate the restraints against translation at
the common terminal: (a) Distribution factors (b) Carry-over factors (c) Shear correction factors (d)
Forces required to produce a unit translation of the common terminal For a pipe structure with from 1
to 4 degrees of freedom for translation it is probably more advantageous to use Method I. If there are
more than 4 degrees of freedom for translation Method II appears to have merit* ANALYSIS FOK .TERFB^DIWENSIONAL
PIFB STRUCTURES BY
GRQpP RELAXATION
W ■
.
-
NICHOLAS BASSABj,. 33%,
A THESIS ;:
S u b m itted to th e G raduhte Committee
in
p a r t i a l f u l f i l l m e n t o f th e re q u ire m e n ts
f o r th e d e g re e o f
M aster o f S cien ce in C i v il E n g in e e rin g
at
Montana- S ta te C o lleg e
Approved?
a i e < 9,
In Charge o f M ajor I o r k
tfie
< 9 - e l '^
Ghairmahg Exaaiining Committee
y ty
/Z '
/
/
/ /
f
e/
Jc
s C /y s f* * !/
hai^mjah; 4 } rad h a te Committee
Bozemahs Montana
Ju n es 1949
-/ ; A
\-A
YlE',I'
ACKNOWLEDGEMENT
I
I am in d e b te d to A sso c ia te P ro f e s s o r R, C, DeHart o f th e
D epartm ent o f C iv il e n g in e e rin g o f Montana S ta te C ollege f o r
h i s gu id an ce and h e l p f u l in fo rm a tio n .
I
8934 I
I'
I
%
V t^ f- S W - V
OF ^
/1,0^
w * ^ e * 'IW- WI
HFe^tWHa* M*,**"** * * * ..* « .
w w * n w a v » -i« . .ff--** W
p* ^
S
w -*w ’« y
S'
WiW* * * * * * * w* * * *.V** ** **
ZNTBODUGTIOM
0
^ ^ ^
i>
9'
W * * * * * * to* WtotoW**=* * * * * * * * * WtoMto ** ** **"*- **"**;*» W**to Wae*'** tow** ** ** *».**-** ■»** -w * * * * * * **'
BX1©Vi dtXS Ifi1Te
X H ip tj V t / f i f i f i ©
I g s 1Sl©$i
»4 to* « j* to > to * W W W
8
w w „v*.
11
to***'*toto**lto to* to* w W tow W to*** to* Wtoto W WMtotototo ** WtotoWtoto to* to* ********* *to to* M* to* to* *W«*.*»
FBOOEDURS.
S©136VS-X Ftj Xl3’t>3
Sign
C o fiV © & t?
10B
O f iitto
1X^X 1S
B to S p ^ S fi^ i O
f
R
to '* * w* ** ** ** ** ;*-.*- ** to* to* to*'** to* r* * * * * * > ** ** W *to'*W
F f iV
.
0©@
S © ?
GO fiVa*0 VSX5 jPfi©Xofi g
'f i
S S i f i ^
f |@
to*
18
" V to V*
.
14;
•
14
Itoto»W.to**to-tof " to*W , * toyWtoto i * * » w ,t o t o « » - » * w - » « » < * * - - « * -totototo
F^OtrOE1S
H © «i ©
** M* to*™ a* to*
-to * * * ,to .* * * .to -w to to w -w w * -* * * * * * * ,* . * *
.
2- 0 f i
i
to*
8 © $ |,t S - S '
—""^^to^Wtowwto*W
W
W
totowkto*!**tot*to*W
toto*Wtototo***,*.***to*
6V 1*
06
to*
t o * # * * . M* * * * * * * wto to* WM* , toy to* w WMtol***'** to*** to*
06
Wl»»*t<toto“ * - * ^ - I ^ * * toy • » + < ? « '? < • * '* * to* SO'.** HSi-WwrlW M ^ to g iw * .
60
H ri-W M w W w lttiii.viw .^ H M to-'.W W M .gW 'toi.w *,****** w Wtoto-.w W W * * .
80
'****. W to* to* Wywtow toto'to*
S S f i ^ i f i t ? S"
80
1
w W W *T,totoi* ' "to'l«,to*W tototo'toWWW* to * w <to- Wf ->*»»'” *
m-fwop i
ilfiifS&^i-OfiiSgtto StIfiiiifefiXfiiEi
5'o.ifit ;Hes^fiainfe B©% efimifiafeiafi
*.-»*•w^e-^-y^ww**»*.«.;«-
88
I
S iiin in atififi o f J o ifit RfiBferaififee
F in a i Bfia^tiofis end
n
i 'f i S f i 'B i a
33
^«»«-«*.***,**«***,*..*»*,„.»^*^1*^«.
89'
1
.
t i f e f i
* * * « * .« < * .„ .„ ■ » * * » .*
,
o
f
r lo
3. t o l b
J
3 ti
* * . * W ,to*'*. W W W * * W toto yw W Ww w w W. WWwto to* W WWt o " , * * . W
39
ma&B op o o # w m
- ,
isi.OA
'o f
"ScifiSX
'
.
a
3.U$ft
PagA
4X
,
-SI,,
'A*T” '« - I-W ^ W e v --S W -W -W -W -
Siioar- O orroofelofi' I’a o to r s
JiM lOoIfc
S ,fid
44'
il'S B -O 'S jL-Ofi;^
,HTOW WW'-i'.eMiW-1.—W Wh-TO w A, TOe- e- « w.w
4 ? ‘
OOil O-OySXOi"^ TO—WWWTOTO—
TOTO-TOtO
TO-—
TO
-wwTOTOTO-TO.TOTOTOTOTOTOTOTOTOTO1TOTOTOTOTOTO.TO'TO.TOTOTO-TO ^
APP3WDIX
-
-
-
-
'
X-4
0 ^£?A,^XOIil TOTOTO,TOTOTO
-TOTOTOTOTOTO-TOW—TOTOTOTOTO—TOTOTOTOTOTOTOTOTOTO—w.wT O S O '
II,
DmiVATlOW OP W W & MlMT jSQW lOM -------- -
' 111% m a p w o m s w m&. mo m w i o #
W m A i m B O I W AWD gO PW K a#
54
o@
so
C
0y'%ABL80
T4B&B # 0 ,
I
.
,
'
..
. ;
yaga
IaQoatIoa of Heafcral Point ead Slastle -.fro*
poatlOo of
@'y§t©®
w.*4^
~i=,,» fS
XX _
" -&oo&tlo& o f^N eatrsX p o in t &#d E la s tio - Pf4Q^'
P O^tX© Si Of
§8
> » |'» i« « n * i « « - * » ( i i« f n * ! H t ^ - W '» « .! o n .m - »
i(%
III
D ateym ln& tio# o f DeAOmlaatoe B etaem laan t
O'f ■,K3)8
t ’O®
Hjr«-W
-*».>VI 'W
ff
"Y 1$,
I#
D e te rm ia a tlo a o f D eaom laator D o term la aa t
Of ■ClXXilB .Sf'StOSi ->*•*
w v - * '! * '* ™ « •,« « •» rti.iw iA * . . « d
,W W JW W .1R
'¥
N e a tr e l P o ia t P oroeg S e q a lr o l f o r a D a lt
% $ 8 * l* tl6 # o f N o a tre i P o la t o f J# 8
^ fXsi3l
tU
.-^ ^ w
>d«W
^'.^*=1
W
W
aiF*%*KY**M
a**»
91
'’HS'BBt?3;02|S SiiEX
V III
-
X
XI
X li
«% 3»^'
- N o a tra l P o in t Poro o# R eqalreA f o r .& O n l t " -.
' T r e a e la tl o a o f S e a t r a l p o in t o f # '0 8
V II
IX
3,3
Jgg
*@w$%W l a la c k poaaA# a t PlxeA B ad e'of - .
' . Ikwtpin* .%r$tem Dae to & P o s it iv e
% l t TreA$la%lo% .of N eatral f e i n t
.84,
Sad NomeaW l a IW k ^owade Dae to B xpaaeioa
84
W w tr a l■P o in t Forces* end ffiomoat 'SoqaireA
f o r a' G a lt P A e l i l v t ' R d S atlo a o f J o i n t 5
o f SSB SyS't OtBI *-»*'<**♦*
^i1-I«*A™,*«W.*,,4;^li«,W*■*«<.«.’«1 jJJfjl?
_-
N eu tral P olttt Poreee end #omeat R epaired f o r a D hlt P o a itlv e R otation o f J o in t B
Of {EFS.tB Syt t OS. «•m,-wiiurtS"a*.W -^ ^ w^
w A 4 » < ( . .^0:
- Nomeate a t 3%##& SW aad A oiat 0 o f Xaeh
System Dae to a . P o e itlV e W lfc- R otation
o f J e la t # o f &%oh Sygtem # lt h no
'fren.'P-lation o f S
«-.*n•»’» »' »»*. ^
W*.**«4-*»
&I8$ 0# ?49b#B .
pSBmiPOSgB
' ..
-
Page
X I I I
■Bslmtolng F ix e d IbS ,Mosants Due to Esspan* '
JLOlH. w
^^
^ w «e*i,-»«,^^
M ^ ^ -Jfcf 33i,
XI?
IMa Boaotiam in ptnmda Bue to a $foaiMv©'
Ohit Itosieht 'at B of -Sacti -Sjstete witb '
ifO S^CiiS-XatIoiX^
^ ^M*•WM
X?
% d &@aot&o#8 &R &@#&dd We' W A Y = '&%' 'Oo i ^ i ^ e h t eOi i*03? hoiiB:, t il on. ^ ^ —v —vr.w.vv-*-.
XVI
jjij
#%& Ieesti^ne iti ponbda Sue to AS? = 1 $!
Oo%»y^ot@a f03p 'te 'tn tld b ^hi-wvvwww.ww^w*,^**XVII
BalaAelng Fiaad -Bad M##aa&& #&a Ga &
Bnlt
la +YSlreetlan at B
@7
Bala%&l&g Plasad Bad Moments Bua to a
Salt translation in *& Blrsetlan at M
38
Final Moment#
XX
■
pounds ^^w-******^^*-
Bnd Beaetlona i& panada
6a Bapanaloa
Oorreeetad ^or'%panal&tiOA of B.wit# #
Bentralnaa Against ^station f*,--*^*.^^,**
4@
XXI
.FlMAd BM Momaata l # Iaeh- pound* Boo to
%%an'6ion ^ o rra o to d f o r T r a n a ls t io n
% lth B B e a tra in o d ,A gainat R o ta tio n *■«***<*« * s
XX#
W f a e t o f a P o n ltlv s
%mon$ Qh'sngo
a t F e in t B in
P la n a
XXXI#
X X I?
4$
#nd B e a e tlo n a and B o A tra ln ta a t B in pound# Due to a ^ a s l t l v a IJn it W mont , 'in In o h pound# A p p lied a t B w ith a ...........
F ix e d A g a in st T r a n n lttlo n ^*"4%'*^-*^'*;^*.^ 4$
T rs n s ln tio n # B oqairod t o B llm ln o to th e
R e s tr a in t# Dno t o & Q n it Momohtyln In eh
”'' 6% Bi- »i«T*f-#1«'-l»-1*—
»•
WWj*'A^'-iii»»,*r**,-"-WW
&i&$ OF Taa&B#
TABlrB BO,*
XXV
XXVI
XXVII
XXVIII
B3SCBIFTIW
Page
Siies'3?
# > r W - * t-v » , ^ , . ^
SnS SBS^S1
^
»•<<■“* ■li-*'^ ,«*«k !)4i • » « * •« • * » * * « n iw « *
48'
49
B&# R eaetlo& a && #ot*##8 #n@ t o T p a B sIa tlo a
R eg u lfa# t# M la lG o te B e stp a l& ts %haa,
J o l a t B R o ta te s a# Amowt C opresgoadiag
to a D h it Momaat 1& I a a b Bou&de #*»+**-*
W
F la a I Bad Rsa&tl&ae l a p@#%6@ *^^**^+»*^**
61
v
The group r e l a x a t i o n p ro c e d u re f o r d e te rm in in g momenta
and r e a c t i o n s a t th e f i x e d ends o f a th re e -d im e n s io n a l p ip e
s t r u c t u r e s u b je c te d to ex p a n sio n r e s u l t i n g from te m p e ra tu re
change u t i l i z e s p r i n c i p l e s o f th e n e u t r a l p o in t method and
th e moment d i s t r i b u t i o n p ro cess* The g iv en p ip e s t r u c t u r e i s
su b d iv id e d in to g ro u p s o r system s su ch t h a t each system h a s
one te r m in a l t h a t I s common to a l l system s and th e o th e r te r m i­
n a l a f i x e d end* T h is s u b d iv is io n h a s th e ad v an tag e o f . r e ­
q u ir in g o n ly th e c o n t r o l o f 5 d e g re e s o f freedom o f th e common
te rm in a l d u rin g th e s o lu tio n * B efo re p e r m ittin g expansion
th e common te rm in a l i s r e s t r a i n e d a g a in s t r o t a t i o n i n each
p la n e and a g a in s t t r a n s l a t i o n i n ea ch d ir e c tio n * I h e n 'expan­
s io n OCchrsil moments th ro u g h o u t th e. str u c tu r e , end r e a c tio n s
and r e s t r a i n t s a t th e common te rm in a l a r e induced*
The r e s t r a i n t s a t j o i n t B may be r e le a s e d by e i t h e r o f
two m ethods as fo llo w s? ( I ) By f i r s t a llo w in g r o t a t i o n a l
e q u ilib r iu m to o c c u r and th e n r e le a s in g ; th e " r e s t r a i n t s
a g a in s t tr a n s l a t i o n *
(S) By r e l e a s i n g th e r e s t r a i n t s a g a in s t
t r a n s l a t i o n f i r s t and th e n allow ing- r o t a t i o n a l e q u ilib riu m
to occur, b u t b a la n c in g s h e a rs each tim e th e common te rm in a l
ro ta te s * ,
In A ppendix I i th e s i x , n e u t r a l p o in t e q u a tio n s a re de­
r iv e d and a r e used to p ro v id e th e f o llo w in g 'ite m s n eed ed to
p e rfo rm th e moment d i s t r i b u t i o n p ro c e s s and to e lim in a te th e
r e s t r a i n t s a g a in s t t r a n s l a t i o n a t th e common te r m in a l:
(a ) D is trib u tio n f a c to r s
Cb) B arry ^o v er f a c t o r s
(e ) Shear c o r r e c t io n f a c t o r s
(d ) P o rces r e q u ir e d to produce a u n i t t r a n s l a t i o n
o f th e common te r m in a l
For a p ip e s t r u c t u r e w ith from I to 4 d e g re e s o f freedom
f o r t r a n s l a t i o n i t i s p ro b a b ly more advantageous to u se Meth­
od I* I f th e r e a r e more th a n 4 d e g re e s o f freedom f o r t r a n s ­
l a t i o n Method I I a p p e ars to have m e rit*
...........
................................ ...
;
. ..
.
•
-
'
•
• ■
-
............... .................. .............
"
' IMTRODncitJOiy
,
■'
Object
The p rim a ry o b je c ti v e o f t h i s t h e s i s i s to p r e s e n t a
group r e l a x a t i o n p ro c e d u re f o r d e te rm in in g moments and
f o r c e s a t th e f ix e d ends o f a th re e -d im e n s io n a l p ip e
Y
s t r u c t u r e w ith 3 o r more f ix e d ends s u b je c te d to exp an sio n
/
r e s u l t i n g from te m p e ra tu re charge* A com parison of-tw o
m ethods by w hich th e r e l a x a t i o n i s ex e cu te d i s th e second**
a ry o b j e c t i v e ’s
p r e v io u s I n v e s ti g a ti o n
- ^
....
,
--- ---- T w T ^ v a il^ l T m e th o ds o f e v a lu a tin g th e moments and
f o r c e s a t th e f ix e d ends o f a th re e -d im e n s io n a l p ip e
s t r u c t u r e w i t h .t h r e e f ix e d ends r e q u ir e th e s o l u t i o n o f a
minimum o f six*" and a maximum o f tw elve^ sim u lta n e o u s ©qua-*
tio n s *
The method .in v o lv in g s i x sim u lta n e o u s e q u a tio n s u t i l i ­
ze s th e moment ares, p r i n c i p l e s and th e p r i n c i p l e s o f the
n e u tr a l p o in t m ethod^
%f th e str u c tu r e has more than 3
f ix e d en d s» the. number o f sim u lta n e o u s e q u a tio n s to be
so lv e d i n c r e a s e s *
I*
^ D e s ig n o f P ip in g S y stem s," p u b lis h e d by M* W* K ellogg
G o,, Eew York* E* Y$* 1941.
.
„
T «
"Theory
o
f
Modern
S
te
e
l
S
tr
u
c
tu
r
e
s
,.'
?ol*.
by
h* Jt*
Se
G r i n te r , p u b lis h e d by th e M acm illan Gos , a , Y.
pp, 206^810
-
,,
. .
. . . .
% e e q u a tio n s o f th e g e n e ra l Method o f in d e te r m in a te
s t r u c t u r e s ^ alo n g w ith th e v i r t u a l work p r i n c i p l e s 5 .are
ap p lied , i n the- method, in v o lv in g tw e lv e sim u lta n e o u s aqua­
tio n s*
T his m ethod r e q u i r e s t h a t th e s t r u c t u r e he c u t hack
to a . s t a t i c a l l y d e te rm in a te ones th e n knowing t h a t th e f r e e d
■
ends can n o t t r a n s l a t e o r r o ta te * th e d isp la c e m e n t due to
ex p a n sio n i s e lim in a te d w ith th e a id o f v i r t u a l work p r in e i*
p ie s*
A t h i r d method5 makes u se o f th e moment d is t r i b u t i o n ?
p r o c e s s B a c h member o f th e s t r u c t u r e i s allo w ed to expand
w h ile r e s t r a i n e d a g a in s t ro ta tio n *
Then each, j o i n t i s
allow ed to r o t a t e w ith t r a n s l a t i o n p r o h ib ite d ^
A fter a.
j o i n t ,r o ta te s * th e r e s t r a i n t a g a in s t t r a n s l a t i o n i s re le a se d *
T h is p ro c e d u re o f a l t e r n a t e l y a llo w in g a j o i n t to r o t a t e
and th e n th e e n t i r e s t r u c t u r e to t r a n s l a t e w i l l f i n a l l y r e ­
s u lt i n a c o n d itio n whereby t h e r e w i l l he no f u r t h e r ten d en cy
f o r t r a n s l a t i o n o r r o t a t i o n when th e j o i n t s a r e re le a se d *
in d i c a t i n g t h a t th e s t r u c t u r e h a s re a c h e d e q u ilib riu m ^
4*
5*
6*
7»
I b id PPo.74-75
I b i d .pp * 35-41
D is c u s s io n o f “M o m e n t-D istrib u tio n A n aly sis f o r ThreeD im en sio n al P ip e S tr u c tu r e s * ” by: R. C-* DeHart* A*S*.fuE»
T r a n s,, Vol* 86* 1944, pp, &240*&244
“C ontinuous .Frames o f R e in fo rc e d C oncrete* by Hardy
C ross and I , D* Morgan p u b lis h e d by John W iley and Sons,.
Inc-* * M* X* p p , 81-125
'/
'
Im portance
Tlie group r e l a x a t i o n p ro c e d u re r e q u ir e s th e s o lu tio n o f
o n ly 3 sim u lta n e o u s e q u a tio n s a t any one tim e a n d "th e re b y
re d u c e s th e te d io u s ta s k o f s o lv in g s i x o r more sim u lta n e o u s
e q u a tio n s as p r e s e n te d by two o f th e a v a ila b le m ethods.
4
p h y s ic a l p i c t u r e o f th e e f f e c t o f j o i n t r o t a t i o n and j o i n t
t r a n s l a t i o n on th e moments and on th e f o r c e s a t th e fix e d
ends i s p r e s e n te d by a p p ly in g th e group r e l a x a t i o n p ro c e d u re
w hich i s o f a s s is ta n c e to th e e n g in e e r a n a ly s in g th e
s tru c tu re .
W hile th e s o lu tio n g iv en i s f o r sq u are c o r n e r s , th e
method can be a p p lie d to p ip e s tr u c tu r e s , w ith bends a t th e
corners®
When q u a r te r bends a r e a p a r t o f th e p ip e s tr u c t u r e ,
t h e i r le n g th s m ust be m o d ifie d when com puting th e ■'c e n tr o id o f
an o rth o g o n a l p r o j e c t i o n and when com puting th e moments o f
i n e r t i a and p ro d u c ts o f i n e r t i a to ac co u n t f o r th e added
f l e x i b i l i t y due to f l a t t e n i n g o f th e cu rv ed s e c tio n when sub-=
je c te d to bending®
4 th re e -d im e n sio n a l, p ip e s t r u c t u r e w ith
two f ix e d ends c o n ta in in g c i r c u l a r q u a r te r bends' h a s been.
so lv e d b y - th e n e u t r a l p o in t method by 8* W* Spielvogel®
u
1
"
"
"/
The u se o f q u a r te r bends re d u c e s s t r e s s c o n c e n tr a tio n s a t
th e co rn ers*
-
•
•.
•
,
./
^Stress C a lcu la tio n fo r h i g h ^
e PipTng-ii%''' by S0S p ielv o g ela ■Power, F eb ru ary 1941, p p 0 67-69
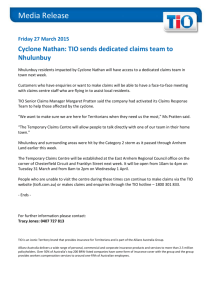
1'he p ip e s t r u c t u r e shown in F ig . *I 9 i s su b d iv id e d into,
groups o r system s w ith B b e in g one te rm in a l o f each system
and a f ix e d end th e o th e r te r m in a l«,
BBB4 and, BFQBs,
These system s a r e ABt.
J o in t B i s r e s tr a in e d , a g a i n s t r o t a t i o n i n
each p la n e and a g a in s t t r a n s l a t i o n i n th e % and Z d ire c tio n ®
b e f o r e -expansion i s perm itted#,
The e f f e c t o f d i r e c t s t r e s s
r e l a t i v e to e lo n g a tio n o r c o n tra c tio n , l a to be n e g le c te d in
t h i s a n a ly s is ^ th e r e f o r e AB m ust be allo w ed to expand*,
T his
p erm a n en tly d is p l a c e s j o i n t , B in th e X d i r e c t i o n b y th e a*
mount o f ex p an sio n o f AB6
A fte r AB expands.,, i t s e rv e s as a
perm anent r e s t r a i n t in t h e X d ir e c tio n s .
F or each o rth o g o n a l p r o j e c t i o n o f th e e l a s t i c a r e a S4
d s /E I t o f each complex system as BBB and Q-FCS4 th e c e n tr o id
o r th e n e u t r a l p o in t i s ev a lu a te d *
F o r a member t h a t ap p ears
a s a p o in t i n an o rth o g o n a l p r o je c tio n * . an e q u iv a le n t le n g th
i s used s in c e i n t h i s p la n e ' th e member a c ts in t o r s i o n
r a t h e r th a n fle x u re *
The e q u i v a le n t.. le n g th i s e q u a l to th e
p ro d u c t o f th e a c tu a l, le n g th o f th e member and a c o n s ta n ts
T h is c o n s ta n t i s .equal to th e r a t i o o f BI to QJg. The
c o o rd in a te axes p a s s th ro u g h th e n e u t r a l p o in t#
The moment.
9c ' The p ip e s t r u c t u r e u s e d ^ l s -% e ''same as' th e 'ond g iv e n I n ' ^
c lo s u re to d is c u s s io n o f paper* itMoment D is tr ib u ti o n
A n a ly sis f o r T h ree-D im en sio n al P ip e S t r u c t u r e s * n by R* G=
DeHart* J o u r n a l o f A p p lied M echanics* A# S6M,0E» T ra n s6*
VoI* 07, 1945* pp* A-188-
-13
+Y
A =. 58-
A ll members a r e 8” sc h ed u le 80 carbon s t e e l
E = 24x10 p s i in te n s io n and com pression
a t VSQ0F
G= 9 .6 x l0 6 p s i in sh e a r a t VSO0F
J = 2 1 1 .4
F ig . I
”4
T h ree-D im en sio n al P ip e S tr u c tu r e to be A nalyzed
o f i n e r t i a and th e p ro d u c t .of i n e r t i a .of th e e l a s t i c a r e a e
ab o u t th e axes th ro u g h th e n e u t r a l p o in t a re com puted and
■V '
■
■.
ta b u la te d i n f a b le s I and IX.$ S in ce EI i s c o n s ta n t in t h i s
'
problem and s in c e I t i s in th e denom inator# m u ltip ly in g equa­
tio n s Sb th ro u g h Bb sh o w i n Appendix, 11 by E l removes, t h i s
■
denom inator# Ih e te rm s ..in T ab le I and .I l a re o f t h i s form#
'
S i w G onvention
The s ig h f o r t r a n s l a t i o n I s p lu s I f th e movement i s in
the p o s i t i v e d ir e c tio n ' o f th e axes as in d ic a t e d in T ab les I
and l i t
The s ig n f o r a f o r c e i s p lu s i f i t a c ts in th e posi**
t i v e d i r e c t i o n o f th e axes# ■Moment i n a p la n e i s p o s i t i v e
i f th e n o tio n o f th e j o i n t on th e member i s c lo ck w ise when
th e p la n e i s view ed a s in d ic a te d i n T ab les I and II#
U n it T r a n s la tio n E f f e c t
The t r a n s l a t i o n o f th e n e u t r a l p o i n t • in one Of th e .coor­
d in a te d i r e c t i o n s i m p l i e s . t h a t j o i n t B a lso t r a n s l a t e s . in th e
same d i r e c t i o n and th e same amount# b u t i t i s r e s t r a i n e d
a g a in s t t r a n s l a t i o n i n th e o th e r two d i r e c t i o n s and r e s t r a i n ­
ed a g a i n s t r o t a t i o n in each p lan e#
The n e u t r a l p o in t f o rc e s
. Ejt!,,. 3L and E55 c o rre sp o n d in g to a p o s i t i v e u n i t t r a n s l a t i o n in
th e $ d i r e c t i o n o f th e n e u t r a l p o i n t o f system dPGB a re comI
p u te a from th e n e u t r a l p o in t e q u a tio n s Sb th ro u g h Bb shown .
"in Appendix H s
_________________________ - l b - _________________________
TABLE I • LOCATION OF NEUTRAL POINT
SYSTEM
AND ELASTIC PROPERTIES OF EDB
PROJECTION IN
X-Z P L A N E
X-Y PLANE
Y -Z
PLANE
I
E
B
Vi
A
+x •
-i-x"-
<
—
+X-
E 1D
+ Z.
C E N T R .O I D
Y LY X" LX"
96
O
48 4608
115.120 O O
O
L
ZAb
ED
DB
O
120
-7200
-7200
240
4608
4608 _
18 . 1
24b
1.25* %
Ixv
ED
DB
DB
961t 9 6 . Z 9. 3 l
1. 25 - 120 » 16.7 1
j^ .
O
-60
Zlb
O
ED
O
DB
1. 2 5 - 9 6 - 3 0
IZ O * 3 0 ■ O
-
0 -0
ED
- O
DB
.
| . 5 f a t K IO 5
ED
1. 2 5 - 9 6 » 3 0 *
=
. 525- t o
DB
r , » l 203+ I Z 0 » 3O 2 =
2 . 0 8 6 -IQ S
48 4606
4608
O O
YZ
3 3 3 * 26.7
= .8 5 4 - I O 5
IZ0 » ( - Z 6 . 7) « ( - Z I . 3 ) = . 682 » I 0 S
1. 5 3 6 - I O 5
% »
Ixx
5
O
-7200
-7200
I
1«
9 6 * 2 9 .3 - O =■
L 2 5 * l 2 0 * ( - l 8 . 7 ) - 0 --
I'xx
ED
ED 9 6
DB 120
-7200
- - 3 3.3 '
216
-7200
=- 3 0 "
240
'
r LY'
I----«
-<
-<
ED
DB
LX"
O
O
-
1. 0 8 0 - I O 5
2 .5 2 0 - I 0 5
3 . 6 0 0 -1 0 5
ED
96
DB
A » I 2O L | Z
»
33.32
1065 - I O b
-
0 *Z 6 .7 z - Z . Z 9 5 ' I O 5
3 , 3 6 0 * IO 5
i;
Iv
ED
N E G L E C T
ED
N E G L E C T
ED
DB
N E G L E C T
DB
n e g l e c t
DB
i7 * 963 + 9b - Z
120 » 2J . 5 1
b l 1-
1. 4 2 1 » 10s
.
. 5 4 4 ., 10s
I.
965«
IO s
—Xo—
TABLE I l : LOCATION OF NEUTRAL POINT AND ELASTIC P R O P E R T IE S OF
G FCB SYSTEM
B
PROJECTION
X-Z PLANE
X-Y PLANE
+x*
75- 6'
,
2 2 4 .2 *
I
C
G
NP,
,F.C ’ *
d
B
7200
O
O
300
600
-
150 4 5 0 0 0
7200
12
"
45000
43200
594
53568
53568
600
594
Ixr
O O
O
GF IlS-IZO
FC 144
CB 30 0 144
45000
I
I
+Y«
CENTR.OID
L
LX"
LZ"
Y" Ly« X" LX"
GF
IZO
FC IlS-IU
CB
GOO
7200
+xV
225“
75"
L
1c.B
NPl "
•e
3
+X-+
"oO
2
*x> x"i
Y-Z PLANE
120
60
7100
120 17280
150 4 5 0 0 0 C B 115-3001144 5 4 0 0 0
45000
639
64368
H O 45000
694 8 0
45000
64368
639
Ixz
Y" LY"
Z"
L
OGF
OFC
F
10368
10368
9 0 .2 “
G
144
1 0 0 .7 "
6 9 480
108.7"
Itz
GF IZO«75»48
- 4 .3 2 0 -IO5 GF L25»I20 »75.8» 90.2 = 10.26 »I05 GF 120 »48.7 »100.7 - 5.885.10s
FC I.Z5'I44»75»(-I2)»- I.620»I05 FC 144«756-18.2
- I.97-I05 FC 1 4 4 » (-||.3 )» 2 8 7 = - .467.10s
CB 3 0 0 « (-7 5 )» (-l2 )- 2 .7 0 0 » I0 5 CB 300»(-74.2)»(-53.6>||.98»l05 CB I.15-3O0.(-|L3)»(-433)--|.835-IOs
5 .4 0 0 -I 0 5
Z4.2I*I0S
7253-I05
Ixx
GF 4 -I2 0 S>IZ0»48z» 4 .2 0 5 »I05
FC |.Z 5»l44»t2z = .259» IO5
4 3 2 .1 0 s
CB SOO-IZz
4 .& 9 6 - I 0 5
Irr
Ixx
Irr
GF 1.25 »120 »90. Zz - 12.204.10s GF I20» I0 0 .7 Z
* I2.I69-I05
FC jj» |4 4 3+|44»l8.2Z- 2 .9 6 5 -I0 5 FC ^»I44S+ I44»2M Z= 3.674»IOs
= 8.683.10s CB l.25»30O»43.32 - 7031-IO5
CB 3 0 0 - 5 3 .8 2
2 3 8 5 2 » I0 5
22.874.10s
Izz
Izz
“ 8.618-I05 G F i i ‘ t203tl2 0 -4 8 .7 Z= 4 .2 8 6 . IO5
GF IZ 0»75z
- 6.750 »105 C F L 25-I20.75.81
- 8.274.10s FC I4 4 » ll.3 z
FC 1.25-144*751 = 10.125-IO5 FC 144» 7 5 .8 z
= 1 8 4 .1 0 s
CB ^»3003+300»751- 39.375»I05 CB ^ -3 0 0 3+ 300 »74.2Z»39.017» IO5 CB l.2 5 » 3 0 0 » ||.3 z - 4 7 9 .1 0 s ,
5 6 .2 5 0 -IO5
55.909» IO5
4 .9 4 9 » I0 5
*.174.
5c)
-BI. t SSoViaxlO6Bx -
BcO
* SpiOxlO^Bg
70)
•Si® S lxlO t3Bjj.
5*40x10%
» 24*21x10% ,
y
+ 79*124x10%
= ^Q
- 7*255x&0%g = 0
J
— 7*S55xlO % y + GOtSaSxlQ6Fg = Q
th e n e u tr a l p a i n t f o r c e s c o rre sp o n d in g t o ' p o s i t i v e
u n it" t r a n s l a t i o n o f th e n e u t r a l p o in t in th e Y and
tio n s a r e found®
d ire e -
These a r e ta b u la te d alo n g w ith s im ila r
tr a n s l a ti o n s , f o r sy stem .SBB i n T ab les T and Via.
d e te rm in a n ts
p ro v id e th e b e s t s o lu t io n f o r t h i s ty p e, o f work s in c e th e
denom inato r d e te rm in a n t l a alw ays th e same f o r a g iv e n sys~
tom*.
The d en o m in ato r d e te rm in a n ts a re e v a lu ated . Sn T ab les I I I
and IV f o r system s BdB and QFQB r e s p e c tiv e ly *
System AS i s a
S in g le member and i s t r e a t e d as such*
In StI g 6: S sy stem BE1QB i s shown w ith th e n e u t r a l p o in t
f o r c e s r e q u ir e d to p ro d u ce a p o s i t i v e u n i t t r a n s l a t i o n of th e
n e u t r a l p o in t in th e 3C d ire c tio n ®
The moment a t B in th e XY
p la n e pro d u ced b y t h i s t r a n s l a t i o n Is.I
May = (*0068xl0"& B i#j(2a8«) ~ (+0548xlG*Sg% #)(i2d) = 16420*^
T h is moment i s clo ck w ise and i t i s th e moment w hich j o i n t B
m ust e x e r t on th e system a t I to .p r e v e n t r o ta tio n *
The abso­
lu t e v a lu e s o f th e l e v e r arms u se d a r e o b ta in e d from T able X l6
Thp,.moment a t B in th e XY p la n e 1 s t
K r?
*
=
(* O 5# x l
0*
■
% # ).(iQ
8 ").
-
- ■•
{ * 0 0 S 8 %10 T % I # X
i
>■
.
7 9 '" )
„
=
159009" #
t Taluo o f Bsnomixmtior BatoKainanti. f o r EDB System
* ^ s s M ly y ^ ^ y y ^ ^ a s
^
❖ 3( - I z y )
( ^Z sz )
^
""1XZ )
* 3 7 o 5 3 2 x l0 15
- ( - l , 5 3 e x l 0 5 ) 8 x 5 » 6 8 6 x l0 5
"’’t “ ^yz I
■ t ” ^xy I
5 P6 8 t e l 0 5 x 3 , 3 6 t e l 0 5 x I o 9 6 5 x l0 5
(^ a z +!&&)
O
( -I yz )
O
^ y y *I yyl
O
-13O 419X1015
> 0 °
*24» 113x10
15
GT-
TAB&B IH
■
TABU? IV
t Taluo o f BanominaSor Determinanti fo r GIiGB System
*138.431x10
)2 U z x -erIx x )
- (-7.253X105 )2 x 28.74axlOS
-
1.512xl018
"1Xy )2 (1Sz "frlZZ^
5 2
5*
-(-5.40x10 ) x 60.858x10
-
1.775x10
2 (-5.4QX105) (-24.21xlOS) (-7.253xlOS)
-
IS
1.896x10
-(-24.21xlOS)2 x 79.124xlOS
- 46.376X1018
- t -Iy z
^ZZ "frlZZ^
<«( - I $ y ) ( -I=Bi I
-......
Ig
28.748xl05 x 79.124X105 x 60.858X105
"t^1XX "frlZxHlyy
( - I 5ra I
*"( "1XS ^ (^yy *^yy)
Jo
,
D jj
.
0
♦ 86.872x1018
T A B L E V : N E U T R A L POINT FORCES R E Q U IR E D FOR A UNIT T R A N S L A T IO N OF N E U T R A L PO IN T OF
E D B ,S Y S T E M IN
TX D IR E C T IO N
T Y D IR E C T IO N
,T Z
DIRECTION
'
SOLVING FOR. NUMERATOR DETERMINANT ( D x )
+ (-AX E l I(I-TY+IYYKIzt+I 1Zz)
- ( - A X E l K - I yz K
- ( - A Y E I K -I%Y K I z z T r z )
+ (-AYEI K - I x z K - T z )
- (-AZ-EI )( - I x z ) ( I yy +I' yy )
+ ( - A Z E I K - I xy )( ' 1YZ. >
E I x 3 .3 6 0 x l0 5 x 1.965x10s
-E I * (-1 .5 3 6 » iq S j z .
O
O
O
O
+6.60Z«I0"’EI
-2.359*10'° EI
Dx
OR
- ( - A X E I H - I xy K L z +I W
-H -A X E IX -I% z
K "T z
)
+ (-AYEI HI xx+I 1Xx IUzz+I-Zz )
- ( - A Y E l K - ! , Z -)1
- (-AZEIK - I yz -KIxxT'xx)
+ (-AZElK - I xy )( - I xz )
DETERMINANT
•
0
O
Dx
O
O
E I > 5.686x10s - I.9 6 5 x l0 5
O
O
O
d eter m in a n t
O
O
Dx
O
♦n.n2*io'0E i
Dy
O
O
O
O
- E I » (- 1.536 x|05>5.68fc»IO5
O
+tU 7 2 x |0 loEI
Dy
$
> 6 .7 3 3 x10ioE1
+8.733»I0'°EI
D z)
-(-A X E lK -Ix% )(I yy+I' yy ) O
+ ( - A X E I H - - I xy H T y z ) 0
-( -A Y E lK - I y z KIxx+I'xx ) 0.
+ (-AY ElX - I XY K - I x z ) . O
+ (-A ZEI / (Ixx+lxxKI yy+I yy ) O
O
- ( - A Z E I H - I xy )2
0
0
- E I x (-I.536«l0s )x5.fe8fe*l05
0
O
0
• .
Dz
Fx= D x + D b
.0
.D y )
Dy
NEUTRAL
O
O
O
..
>4.243xlO'°EI
0
O
O
O
O
O
roR.
O
O
O
O
O
O
Dz
O
I-AljIxlO10E I
O
0.
0
O
E 1 x5 .6 8 6 x|0 5 x 3 ,3 6 0 x I05
O-
+8.733x10'° EI
+I9.\05» IO10EI
DZ +19.105*10'° EI
POINT F O R C E S
Fy= Dy+ Dd
Fz= Dz + Dd ___
Fx=4.243*lo'°EI+24.11A*IO15- .17£>xIO'5EI •
Fx--O
IIfy= Il1InzMOioE I + Z ^tD x lO '5= .4 6 3 x|0 ' 5 E1
Fx= 8-733 XlO10E I + 24.113 x IQ15 = .362x10-5 E l
Fx= O
Fy= 8-733 XlO10EI + 24.113 XiOis= AEZxlOsEI
IFz- IzioSxio10E I+ 24113 =101-5'= .792 Xip- 5 EI
TABLE: .V£: NEUTRAL POINT FORCES REQUIRED FOR A UNIT T R A N S L A T IO N OF NEUTRAL
SYSTEM IN
-FX D IR E C T IO N
SOLVING FOR NUMERATOR D E T E R M IN A N T
+(-AXEI)(IYY+rYY)(Izz+IzZ ) EI »79.l24»l0s - 6O.858»IO5
-(-AXEI K - I yz )z -EI » (-7.293«IO5)*
-(-AYEI )( - I xy HI zz+I z z ) 0
+ (-AYEIH -Ixz )( - I yz ) 0
- (-AZEI )( -Ixz KlvY^lVf ) O
ti-AZEDC-lxY )( - I Yx ) O
■ Dx
i- . . . .
SOLyjNG FOR. NUMERATOR. DETERMINANT
-(-A X E IH
+ (-A X EU C
- I xy K W l 'z z ) - E I«(-5.40 «105) *60.856»IO5
- I xz: )( - I yz ) EI x (-Z4.ZM05) x (-7.253.10s )
+ C-AYEiKIxx-T xx HIzT z z )
- ( - A Y E l )( - I x z )*
- ( - A Z E I K - I yz I(I xxT xx)
+ (-A Z E I K - I xy K - I xz )
O
O
O
O
-FY DIRECTION
POINT OF GFCB
-F Z ' DIRECTION
(D x )
+4.815«I0I3EI
- .073»IOi3EI
O
O
-BI »(-5.40«IO5)«60.858«IO5 +.329«IO13El
EI x(-Z4.2I«10s) x(-7.Z53»IOs ) +.176«IO13EI
O
O
+4.7fc2*IOl3EI
Dx +.505»I0i3EI
O
O
O
0
-EI«(-24.ZMO5) *79.124»IO5 +I-Slfcx IOli EI
EI«(-5.40-I05) >(-7.253«103) + .039» IO13EI
' Dx +l.955*IOl3EI
(D y )
+.329'!O'3EI
+.l7fc«IOl3EI
O
O
EI x 28.748 xIO5XGO. 858 XlO5
-E Ix (-24.21 «IOs )z
O
O
Dy
D y +.505 XlO13EI
O
O
+I.750x|Oi3EI O
- .586»ioi3EI O
-EI x(-7.253x|Os) x Z8.748x10s
.208»IO,3EI
BI >(-5.40xlo5)x(-24.2\»l05) +.131 »lol3EI
+1.164.IO13EI
■
D y + .3 3 9 * I0 I3EL
SOLVING FOR. NUMERATOR DETERMINANT ( D z )
- ( - A X E I K - I xz HI yyT yy) -EI x(-24.21x10s) *79.124x |0 5
+1.916 XlO13 EI
O
O
+ (-A X E IK - I xy K - I yz ) E Ix (-5 .4 0 xlO5 )x(-7.253x|0s ) + .039xl0,3EI O
O
- ( - A Y E I K - I yz X I xxT x x ) 0
-EI x (-7.253 x|05) « 28.748 xIO5
+ .Z09x|0l3£ l
O
+ (-A Y E IX - I xy I ( - l xi ) O
EI x(-5 .4 0 ‘ 10s) x (-24-21 xIO 5 ) + . 131x IO13E l O
+ (-A Z E I K Ixx+Ixx X(Iyy+L y ) O
O
El * 28.748x.l05x 79.124 x|05
O
-(-A Z -E r
- I x y )*
■0
-E l x (-5.40 x IO3 )^
Dz H 9 55 aIO13EI
Dz + .340«I0I3EI
x
Dz
NEUTRAL POINT
Fx = D x -+ D d
Fy=
Fz=
D
y
-+ D
d
DzT-D d-.
+2.275x|013EI
- .029x|0l3EI
+2.246 XlO13EI
FO RCES
E = 4.762»I0 i E I + 86.87ZM 018 =
Fy= .SO? Klb13EI + 86.872»I01&»
||FZ= l.9SSX|0 '3E l + 8k.872»IQ '8 =
.0?4-8»IO"5£I Fx= .SOSKOi3E I + 86.872X|0 18. .0O5aMO"5 E l
.OOS&»IO'sa !>= |.lfc4 .|O l3EI + 8fe.872«|Ol8= .O I34-»|0-s E I
■02ZS»IQ-s EI||FZ= ■340X|0 l3EI+8fc.872»l0la=.0O39»IO~5 E I
FX=I.955»I0I3E [+ 8 (,.8 7 2 » I0 18= 0225 » IO 'SE I
E= .339»IOl3EI+8fc.872»IOla= 0 0 3 9 » I0 " SE I
I== 2 f4 fc x|0 '3E I+ 8 k 8 1 Z .|Q '8 = .0 2 5 9 .1 0 - 5 ^ 1
+Y
+Z
. 0225^10 E l
F ig . 2
N e u tr a l P o in t F o rces R eq u ired to P roduce a U n it
T r a n s la tio n o f N e u tra l P o in t in P o s itiv e X D ir e c tio n
f liis moment; I s a ls o c lo ck w ise 'but i t I s th e a c tio n o f th e mem­
ber on th e j o in t ; th e r e f o r e th e a c tio n o f th e j o i n t o n 't h e '"
member i s c o u n te rc lo c k w is e " o r a n e g a tiv e moment#
In Table
7111 th e fixed, end ,moments' In ■each' p la n e a t B and a t th e
f ix e d end a re t a b u l a t e d fo r- each complex system*
These
moments a r e due to a p o s i t i v e u n i t t r a n s l a t i o n o f t h e ' n 'e u tra l
p oin t*
F or system ABi, ■th e moments a t B and Aj due to a p o s i - '
V
J '‘
t i v e u n it: t r a n s l a t i o n of.VB are ev a lu a ted from th e fo rm u la
m = 6BIA/&2, "
E xpansion F o rc e s and/Moments'
. I---
'
With th e n e u t r a l p o in t f o r c e s c o rre sp o n d in g to u n i t t r a n s ­
l a t i o n s o f th e n e u t r a l p o i n t , th e r e a c tio n s a t G- and E due to
a c tu a l ex p a n sio n a r e d eterm in ed in T ab le 711«,
'When member AS
■expands, th e te r m in a l B o f each com plex system m ust t r a n s l a t e ;
how ever, when ex p an sio n ta k e s p la c e w ith in a complex system ,
th e te r m in a l B can be r e s t r a i n e d a g a in s t t r a n s l a t i o n *
T his
o c c u rs s in c e th e complex system can ta k e up th e change in "
le n g th o f th e members by* f le x u r e w h ile th e s in g l e member s y s ­
tem cannot*
The r e s t r a i n t s a t B a r e eq u al b u t o f o p p o s ite
s ig n to th e sum ©f th e c o rre sp o n d in g f o r c e s show n^ih T able 711*.
The ,.only r e a c t i o n a t A i s in th e X d i r e c t i o n and b y th e law s
o f s t a t i c s . i t i s e q u a l b u t o f o p p o s ite s ig n to th e sum o f th e
f o r c e s in th e X d ire c tio n - i n T able VII*
With th e moments f o r u n i t t r a n s l a t i o n in T ab le 7111, i t
End R eactions in Pounds
R e a c tio n s Due To
C o r r e c tio n s Due Tb
E x p a n sio n
At A .
'
Fx
AX= 0
AY= 0
-+8730
+
Fy
0
. .0
,0
n e g le c t
0
0
0
0
AY=
+ .& 6 "
0
-5 W o
-5 3 3 0
0
-1 2 2 0
-1 1 6 5 0 ;
AY =
AZ=
FX
■
V
F*
+ .58"
+ 2 .5 9 "
.
+ .69"
-3 6 0 0
-
- 381
- 197
-
-
-1L 78
.
85
57,
Txy“
+100
• + .5 8 "
0
AX=
-■ -I
AZ=
0
' .
At. G
.
-5 1 3 0
Fy
Fz
+100
+ 39k
+ 1 .1 5 "
FX
V
AZ= 0
85
AX=
At E
R o ta tio n *
+
I
;!<
TABLE Vll
F in a l
T r a n s la t io n *
AYFay 1
-5 7 5 0 0
AZFAZb1
.- 690
n e g le c t
-
' 39
-
88
■ +8391
0
0
+
5U6
+
33
+ 579
+ 52U
0
+
U5
+1126
+1695
MX Z °
-9 2600
Myz=
-5 0 7 7 0 0
0
+ 796'
AYFAYb1
AZFa2b1
— . 28
- 295
- 1*656
- 192
0
0
+5550
+ 11*98
+31*90
0
0
+21*90
+2190
+11210
Mxz=
-514500
Tyz=
-3 1 0 0 0
- 106
n e g le c t
Ux y =O .
-R eactions?
- 391
■ 0
68
0
- 28
+ • 92
- 153
0
- 231
-
- * R otation e f f e c t given in terms o f moment in inch pounds-.
21
a y f ay=1
+
67
1*8
+
.
20
AZFl z =1
+ 383
+ 161* .
+
+
- 3 7 3 5 ..
28
+ 1*90
- 390
■
-1702
f
Table VIlI;
Moments in Inch Pounds ,at ^ixed;' Ends of Each
Complex System Cue to a Positive Unit
Translation of Feutrai foint;.
* 1 ‘>
■
■
;
AX = +1"
+Ai = +i'»;;x. ■
A 2- =‘+1«*
,
* 83500,.
' Txy
PQ
^xz
Myz
I
O
^xy
I
+402000
.
m ‘
5
^XZt ■
0
• o
*
0 .
•
. +134000
.
+368000.
0
0
o'.
0
-1195000
*295000
0.
rt
'
+823000
-345000
■
0
+ 16420
+ 74700
v
- 53200
*'14270
»116600
81
+ 13600
*
®XZ
"
+ 15420
$
I
At G
I
^ys
^xy
-139000
+
9610
- 54200
'
1XZ
+ 82200
+
8770
+ 1675
Myz
- 47200
+ 23500
- 61400
T able IX;
F ix ed Bnd Moments in In c h Pounds' Due to
ex p an sio n
System GFOB'
P lan e
3140
At B
At 0
System JSDB
At B ‘
At E
X -T
+ 96500
*392500
- 96000 '
-396900
X*%
*826500
+217300
+462100
+154000
T-X
+
-161100
+592100
-828400
5510
,
)
•
i s p o s s i b le to e v a lu a te fix e d end moment a . f o r any tr a n s la tio n ,..
For example^,'■B 'o f ; ey stem GFCBi moves in th e p o s itiv e . X. d i r e c ­
t i o n 1-615” due to ex p an sio n i n AB*
The member CB expands
1*44"j m aking a t o t a l X :t r a n s l a t i o n o f + 2 ,5 9 ” in th e system*
The f ix e d end moment a t B in th e XJ p la n e due. to, AX .= : +8a5 9 ”
i s - computed by m u ltip ly in g (16420 '^ / ” )(+ 2 ,5 9 ” ) ? 42500“^ . •
To o b ta in t h e . t o t a l f ix e d end moment a t B in th e XJ p la n e,
t h i s v a lu e must be added to the moments ,..produoed a t B in th e
XJ p la n e ,due. to th e J and Z ex p a n sio n s i n th e sy stem OFGBq
-All f i x e d e n d ■mpments due to ^ex p an sio n in th e p ip e s t r u c t u r e
a re ta b u la te d i n T able IX*
B i s t r i b u t l o h F a c to rs
The d i s t r i b u t i o n f a c t o r s a t j o i n t B a re d ep en d en t upon
t h e .moment o r to r q u e a t B r e q u ir e d to produce a u n i t r o t a t i o n :
a t B i n ,each plane, o f each system* ■ F or AB, th e moment req u ir­
ed f o r a u n i t r o t a t i o n a t B i s o b ta in e d from M = 4BI9/& f o r
f le x u r e ; and th e •to r q u e r e q u ir e d 'f o r n u n i t r o t a t i o n I i ob-.
ta in e d from T = QJ@/L = E l/l» 2 5 B f o r t o r s i o n .
To f i n d th e moment r e q u ir e d to produce a u n i t r o t a t i o n a t
B in any p la n e o f th e complex system , B i s g iv e n a. n e g a tiv e .
u n i t r o t a t i o n i n t h a t p la n e w h ile i t i s f ix e d a g a in s t tr a n s la ­
t io n ,
T h is r o t a t i o n ca u ses th e n e u t r a l p o in t to be d is p la c e d
a s shown i n Pig* 6 , Appendix .111*
The n e u t r a l p o in t f o r c e s
and moment a c t to r e s to r e th e c o n d itio n e x i s t i n g b e fo re r o ta ­
t i o n and t h e r e f o r e p ro d u ce a p o s i t i v e u n it r o t a t i o n ' a t B*
I f t h i s r o t a t i o n i s ' i n 1the. XX p la n e s' e q u a tio n iSn I s used to
o b t a i n 1th e moment a t th e n e u t r a l p o in t c o rre sp o n d in g to -a,
u n i t r o t a t i o n a t B i n th e
p la n e «
E q u atio n 7b and Sb a re
u se d when th e r o t a t i o n i s in fche:XB‘and
p la n e s, . -Bf sub-,
s t i t u t i n g ■th e d isp la c e m e n ts o f th e n e u t r a l p o in t , due t o ' a
u n it ro ta tio n of
in to e q u a tio n Sb, 4b a n d .5 b , th e n e u t r a l
p o in t f o r c e s r e q u ir e d f o r a p o s i t i v e ' u n it r o t a t i o n o f B a re
determ ined*
These v a lu e s a r e ta b u la te d i n T a b le s X and XE*
The moments in d u ced .a t th e te r m in a ls o f each sy stem due to a
u n it 'r o t a t i o n a t B in ea ch "p lan e a r e ta b u la te d in T a b le -X ll
and a re o b ta in e d by, ta k in g moments o f th e n e u t r a l p o in t
f o r c e s and moment a b o u t each t e r m i n a l , . .
- The' d i s t r i b u t i o n f a c t o r f o r a system a t 1B i n . a g iv e n .
'
■■
p la n e such a s th e XY p lan e I s fo u n d by th e r a t i o o f M/2 Sls
where M i s th e moment re q u ir e d ' to pro d u ce u n i t r o t a t i o n a t B
f o r th e system in q u e s tio n and Z-M i s the- sum o f th e moments
r e q u ir e d to p ro d u ce u n i t r o t a t i o n I n th e XY p la n e a t B f o r a l l
system s* - B slng T ab le X II in. w hich the, end moments f o r each
system due to u n i t r o t a t i o n o f j o i n t B a re l i s t e d , th e d i s t r 'ib u tio n f a c t o r s a t B in ea ch p la n e a re determ ined and tabu*
la t e d In Table
C a rry -o v e r F a c to rs
.
Ho t a t io n o f th e te rm in a l B1 o f a complex system in one
•
T A B L E X •• N E U T R A L P O I N T
F O R C E S AND M O M E N T R E Q U IR E D
EDB
X -Y
SY STEM
IN
SO LV IN G FO R . N U M E R A T O R .
D E T E R M IN A N T
F O R A U N IT
X -Z
P L A M E
P O S IT IV E
Y - Z
F O R N U M E R A"F O R
D E T E R M IN A N T
jo in t
B
o f
P L A N E
O
O
O
O
O
O
Dy
S O L V IN G F O R N U M E R A - f o r . d e t e r m i n a n t
O
(Dz
.
dy
Dx
O
O ■
O
O
Sfe-IEI x 5.686 =IO5*L965 =IO5
+968.69xlOloEI
o ■
2I.3EI *(-1.536*K>5)x5.666=IOs -I86.02«IOIOEI
O
D y tl82.61x|0loEl
)
O
O
O
O
-86.1 El * (-1.536 x|0s )»5.6B6 * IO5 +151.20 XlO10EI
O
-2L3El*5.fe8fe*IOs x 3.360 xIO5
-40693xl0'°EI
O
Dz +35A21*I0'°EI
O
O
O
O
O
O
O
O
O .
O
Dz
O
O
O
O
O
O■
( D y)
-(-A X E lK - I xy HI zz.+ T lz ) O
+ (-A X E l K “ I x z K - I y z I . O
+ (-A Y E I M Ix x tl'x x H Iz z -T z z ) O
O
-(-A Y E I H - I x z I1
O
- ( - A X E I )( " l y z K Ixx+I fXx)
+ (-A Z E lM - I xy H - I xz > O
- ( - A X E t- M - I xz K I y y 4- I yy )
+ (-AXELK - I x y K - I y z )
- ( - A Y E I K - I y z X lx x + I’x x )
+ ( - A Y E I )( - I x y H - I x z I
+ ( -A Z E I MIxx+I'xx J(I yy +^ i y )
- ( - A Z E l H - I x y J2
o f
(D x )
+594.18 XlO10El
-123.46 XlO10EI 90EI *3.360 *I0S *1.965 x|05
+ C-AXElX
) -I8.IE.T. *3.360*105 x I.9fc5»|05
-212.31, IQl0El
+44.11 XlO10El -90E1 * (- 1.536» IO5 J2
181E l * (-1.536 xlO5 J2
- (-A X E IH - Iy z
O
-( - A Y E I M - Xxy ^ I tz + Xzz ) O
O
+ (-A Y E I )C - I x z H ™I y z ) O
O
O
- C - A Z E lK - 1 xz HIyy
O
+ (-A X E I K - I x^ H -I-YZ I O
D x +38I.87*10IOEI
D x -19.35 XlO10El
S O L V IN G
r o t a t io n
P L A N E
O
Dz O
-
N E U T R A L P O IN T
Fx= Dx
y- D d
Fy = D y + D d
F z - D z t" D d
M = -S E I+ Z L
FO RC E ) AND. M O M E N T
F,= -19.35»10 ioE I+ Z 4-.II3*I0I5=-3.29I XlO- 5 E I
Fr = O
Fz*0
M xy - B I + 2 + 6 = 4 .0 6 5 * IO -3 E I
Fx= 381.81»IO10El +24.113 »IO15= 1.584*10-451
Fy =O
Fz =O
M x z = B I + 2 4 0 = 4.161 X IO -3 E l
Fx= O
Fy=182-.61*I0ioEI + 24.113 *I015= 3 . 2 4 6 . IO ^ E l
Fz=350.21*IO’0EI + 24.ID X I015= 1.453 «10-451
M y z = E l + 2 1 6 = 4 . 6 3 0 * IO '3 B I
GFCB
N E U T R A L POINT F O R C E S A N D
SYSTEM
IN
X -Y
S O L V IN G FOR. N U M E R A T O R
M OM ENT
'REQUIRED
D E T E R M IN A N T
FORA U N IT
X -Z
p l a n e
P O SIT IV E
>f - I xzJ z
X Iz z + I zz I
K - I xz )
)U XX+ I \ Y1
)(
-I
xz
)
-5-778 XlO14EI 53.8E1»79.I24x|Osx6O.85Sx|05
IZEI X (-7.253 x|05 )2
+ .063*|Ol4EI -53.8EL* (-7.253 x IO5 )Z
-Z2SEI x (-5.40xl0s)» 60.858 xlO8 + 7. IM xIO14EI O
225EIx(-Z42M 05)x(-7.2S3xl05) + 3.95 MO14 EI O
O
224.2EI x(-24.2UI05) x79.I24xIO5
O
-224.2 El x (- 5.40 xl05)x(-7,2S3.io5)
D x i5.630xlOl4E l
Dx
SO LV IN G FOR N U M E R A T E R
-(-A X E IK - I xx
+ (-A X E IK - I xz
+ (-A Y E l X W l 'x x
-(-A Y E l
-I-A Z E I K - I x z
+ (-A Z E IK - I xx
D E T E R M IN A N T
-(-AXEIK -Ixz. KI x-T+IV y )
+ ( - A X E lK - I xx K - I xz )
-(-A Y E I-K -Ix z ) ( I „ t r x, )
+ (-AYEIK - I xx )( - I xz )
+ (-AZEI KIxx+I '« KI yt +I'yy)
- ( - A Z E I )( - I xx )%
DETERM INANT
I2EI x (-24.21 >I08) x 79.124. IO5-IZEIx (-5.40. IO5 ) x(-7.253»IO5)
-225 EI x(-7.253 «|05)x 28.748x10s
225E I*(-5.40 x.I05) x(-24.2| xIO5)
O
O
Dz
NEUTRAL POINT
Fx= D x + D o
Fx= Dx + D d
Fz= D z + D q
M = -O E l + ZL
FORCES
AND
JO IN T
Y -Z
B
OF
PLANE
+ZF.906xiol4EI O
- .Z83x|0'4 EI O
-43.3E1 >(-S.40x|05)x 60.858. IO5
43.3 EJ x(-Z4.2lxl05)x(-7,253xl05)
-42.947i |Oi4EI 11.3 E1 x(-24.2|xI05) x79,I24-xio5
- .878x1014EI -II.3EI <(-5,40 x|05) x(-7.253.105
-18.202* IO14El
Dx
+I.423*|0'4E1
+ .760 XlO14El
-2.165 XioI4EI
- .044xlO14EJ
- .0 2 6 XlO14El
( 'D y ) .
- .394x10,4EI
KIz z + 1'z z ) IZEl »(-5.40xlOs)»6O.858‘l0s
)( - I x z ) -REI x(-242M05;>(-7.253 x|0 5 ) - .211 XlO14EI
X Iz7 + I 'z z ) 22 SEI x28.74-8 x|Os x60,858= IO5
+39.365x|0i4EI
)( - I x z )z -225EIx(-24-.2Wl0S)2
-I3 .I8 8 .|0 i4E1
X Ixx+I'xx )
)( - I xz )
D x +25.572>I0|4E]
SOLVING FOR NUMERATOR
OF
(D x)
+ (-A X E l)(IXy * rXY)(IZZt I ' ZZ: ) -I2EI x79.IZ4x|05x6o.asax|05
-(-A X E I
- (- A Y E IK - I xx
+ (-A Y E IK - I xz
- ( - A Z E l K - I xz
+ (-A Z E IH - I xy
RO TATION
PLANE
-538EI«(-S40 x|05) x6O.8S8x1O5
S3 8 E I '(- 24. Zl xIO5Jx (-7 Z53 xIO8)
+ I.768xI0i4 E1
+ .945«I0i4 E1
@8^
T A B L E X V
O
0
O
43.3 EI x 28.748 «I05 « 6085&x|05 +7.576»IOi4EI
O
-433EI *(- 24,21 x IO 5) 2
-2.S38*I0i4EI
224.2 EIx(-7.Z53 xIO5) xZ8.748x IO5 -4.675 xIO14EI 11.3 EI *(-7.253xl05),28,748x10s - .236 xIO14EI
-Z24.2EI x(-5,40xIO5)x(-24.ZlxIO5) -2.931<I0|4EI -U.3EI x (-5.40x105) >(-24.2l«l0S) - .148x1014El
d Y -4.893.lO'+El
Dy +4.654.IO14EI
(D z)
-2.299xI0i4EI -53.8EI«(-24.2I»I05) x79.I24xI05
- .047«I0i4EI 53.8ELx (-5.4O»IO5) x(-7.253x|05)
+4.691 >IO14 EI O
+2.94|x|0,4EI O
-224.2E1-28.748* 10S«79.I24 x|05
224.2E 1 x(-5.40 x|0 5)Z
+5.286»10l4E l
Dz
+I0.306x|Oi4 E1 O
+ .ZIIxIO14E] O
-4.3.3 EI x(-1.25T I05) .Z8.748 x!0 5
43.3 El* (-5,40 xIO5) *(-24,21 xIO5)
-50.998 xI0i4E1 -U.3EI * 28.748xlOs x79.124*105
+ .654»I0|4E1 l|.3 E Ix (-5.40x105)2
-39.827xl0'4EI
D2
+ .SOixio14-EI
+ .SbfexUli+EI
-2.570,|0i4EI
+ .OiixIOt4EI
-l.068x|0l4-EI
MOMENT
Fx=SAiOxio14EI+ GbgIZxlO'*= .0648»IO -4 EL
Fy= ZS.J7Zx|Ol4-EI+86.87Z»|0,8= .294*l0-4 EI
Fz= 5.Z86) =IO14E l+ 86.872x10'®= .0 6 0 8 x|0-4 EI
M x y -E I + 600 = 1.67x IO- 3 EI
Fx=- |8.202x|0l4EI + 86.872 »I018= -. ZIO.IO" 4 E I
FT=-:4.893x|o'4EI + 86.a72x|Ol8 = -.OS63«IO'4 EI
Fz =-39.8Z7xl0l4EI + 86872x|0l8 = - .4 5 8 x l0 - 4 EI
Mx z = E I + 5 9 4 = I.68= I0'3EI
Fx=-.026 x|0 14 EI + 86.872 xIO18=-.0003 x10' 4 EI
FY=+4.654>I0I4EI + 86.812 MO18= .0536xlO'4EI
Fz=--1.068'IO14EI + 86.872x IQ18=-.0123 x|0 '4EI
Mx z = E I + 639 = |.5 6 x lO '3 E I
» 29-
fata le XXX?
Moments i n In c h Pounds a t F ixed End and J o i n t B
o f Eaeh System Buq to a P o s itiv e U n it R o ta tio n
o f J o i n t B o f Each S y stem ' w ith no T r a n s la tio n
of B ■
^xz
9xy
System XB
tilXy
+ i6 » 6 7 x io -3 g i
m
'^xz
§
TJZ
%y
Q
^
■ ®yz
0
0
tlO tSV xlO *3^ !
o
0
’
■' ■o+ 3.33xlO *3EI
Q,^
+ 8,33x10*3%%
0
’
O '.
+ a».33xa.o*3m
0
•aj
0
System BDB
0
I
T.xy
+ 4«SSxXO^5EX
» 2a96xlO~3EI
0
m
"iiXZ
5
- g».96xlO"3EI
+18*48xlO*3EI
0
0
^yz
0
+29+7xlO*3Bl
^xy
^ I a82x10*3IiX
»l2»24xlO ~3EI
0
^xz
^ ^ 9 8 7 x l0 * 3 g i
+ .»585x10*5E1
0
%z
0
0
» 4*37310*3EI .
iviXy
+ a*21xl0~&BI
- l^OSalO*3#!.
+ I* 21xlO*3EX
ep
iviXz
S
T7Z
» I «,01x10* ^El
+ lQ ,8 2 x l0 * 3EI
+
+ l a2 0 x l0 "3E l
*
+ I «-81x10* 3EX
-
+ l*85alO *3EI
f
*.406xl0""3BI
*
t
«0906xl&*3BI
-
*886xlO*3E%
iviXy
I
* S iP a x io ^ 3BI
cb .^xz
's .
-Ay2,
a 6 4 x lO * 3BI
+ - *183%10*3EI
• 274x10*3EX
,lOBxlO*3#!
+ Bs SOxIOov3SX " + 4*41xlO*3BI
4874xlO*3Bl
* 30*
p la n e may g iv e ■c a r r y - o v e r moments i n th e o th e r two. p la n e s a t
th e te rm in a l B and In th r e e p la n e s a t th e o th e n te r m in a l»
T his p ro d u ces a maximum Oik 5 c a r r y - o v e r f a c t o r s when th e
<
te rm in a l B r o t a t e s *
C a rry -o v e r f a c t o r s a r e computed using'
V alues l i s t e d in U ahle j&Ilp
8^ 21x10” ^11
Bor example# a moment' o f
i n th e XT p la n e a t B o f system CBSB p ro d u ces a
moment o f - 1 001x10"“®E1
in th e XX p la n e a t
th e r e f o r e the-
c a r r y - o v e r f a c to r fro m I in th e XT p la n e to- B i n th e X? -plane
is
. .
■
- liO lz lO ^ a /G + a ix io ^ ]: = -tl8 3
A t a b u l a t i o n o f th e c a r r y - o v e r f a c t o r s i s made in T able X l l I *
-
•
'?■
R e le a s in g R e s tr a in t s
The r e s t r a i n t s at- j o i n t B may b e r e le a s e d by e i t h e r of
two m ethods a s fo llo w s J
(I)
'
-
, - S v
-- ‘
.'
By f i r s t a llo w in g r o t a t i o n a l eq u ilib riu m to o ccu r and
th e n r e l e a s i n g th e r e s t r a i n t s a g a in s t t r a n s l a t i o n «,
(8 )
By r e le a s in g th e r e s t r a i n t s a g a in s t t r a n s l a t i o n f i r s t
and th e n a llo w in g r o t a t i o n a l e q u ilib r iu m to, occur# b u t
b a la n c in g s h e a r s each tim e j o i n t B r o t a t e s .
Method I w i l l be a p p lie d f i r s t *
Method I
The r e s t r a i n t a g a in s t r o t a t i o n 1$ s u c c e s s iv e ly r e le a s e d
in each p la n e by moment d i s t r i b u t i o n * - T his i s s h e m in T able
X U ld
,
T A B L E XUI■■B A L A N C l N G
FIX ED E N D
M O M ENTS.
DUE
X-Y PLANE
TO
E X P A N S IO N
X -ZL P L A N E
SY STEM G FCB
CARRY-OVER FACTORS
Y -Z
SYSTEM G F C B
CARRY-OVER FACTORS
G x z = - .0 0 9 4 3
G yz= + .4 0 8
S y z = + .0 2 5 3
Gxy= —-020
G xz - + .0 1 5
B x z = — -12.4
G yz = + . 2 8 0
6 YZ = + . 1 4 1
SYSTEM GFCB
CARRY-OVER FACTORS
G xz = - .4 9 1
G xy= + .2 2 4
B*y = + 6 6 8
G x z = I" .0 5 0 1
B xz. = + . 1 5 2
Gxy= + 111
B
xy
PLA N E
= - .0 9 3 8
.6
.5 6 4
3____________ L .2 1 8
«0 .-IIP-.—
.1 5 8
FLEXUR E
£
"fI a
______ :______ __ . 2 3 6
-3 9 2 5
- 95
+
I
- 10
I
+
-4 0 8 8
+ 2113
+ 5
-118
59
-F lIl
58
201
-
+
2
o
O
B OF AB
57
I
+
O
+
33
3
I
+ 809
O *
-S IO
+
+
+ I*
I*
I
I
O
SYSTEM EDB
+
I
16
I
O
B OF GFCB
-2 2 6 5
- 556
+
1 +
- 47
I
-
-IS II
- 855
21
O
O
O
+ 1 1
EXY = ~ . 3 2 5
Ex7=
-x z " - .211
-
221
16
+ 152
+
16
+
4
O
O
O
-2 8 5 1
+ 3695
•8 3 8
-545 *
-9 2 6 *
-8 3 8 * |
.0 9 6
—
T
-1582
B OF GFCB
+ 55
-
JT
B OF EDB
+ 5921
+1540
-3 9 6 9
+ 627
-
+ Il
- It
13
O
l~33?5l
30
+.I
- I
+
E
14
- 9
- 310
+
-5 0 7 0
- 57 4 -
BY IOO.
* INDICATES MOMENTS
DUE TO ROTATION
+ 574
8
O
O
I
-
I
-2 1 0
+844
- 515
-3 1 0 *
-S e ll*
-5 1 5 *
SYSTEM EDB
CARRY-OVER FACTOR
E y z ,=
- 1 51
-8 2 8 4
+ 198
+
I
I
O
I+ I5H I
- |A
B OF AB
Sx = —.161
Bxz " - . 6 3 3
o r s io n
.8 5 2
B OF AB
+ 1 1 + 1 9
O
+ 2162
JT
I
SYSTEM ED B
CARRY-OVER FACTORS
E xz = + . 0318
E XY = — . 6 6 4
CARRY-OVER FACTORS
NOTE: MULTI PLY ALL MOMENTS
:
6 OF EDB
+4621
- 945
2 1
.0 5 2
FL E X U R E
.4 0 1
X
B OF GFCB B OF EDB
+965
- 960
t
52
+ 152
58
33
.3 6 3
1-14851
+ 515
J o i n t R e s tr a in t D eterm im atio n
....
•,
■With th e n ea fe ra iiits a g a iW t. r o t a t i o n r e le a s e d , th e ,'end
r e a c tio n s d e te rm in e d b e fo re r o t a t i o n o c c u rre d m ust he ,correct?:
,
( '
'
ed f o r .th is e f f e c t* i'he amount o f moment used' to d eterm in e
th e change in th e end r e a c tio n s f o r a g iv en sy stem i s th e
a lg e b r a ic sum o f th e moments added I n t o th e sy stem due to
moment b a la n c in g only*
C a rry -o v e r moments a re n o t in clu d ed *
I'he moments a r i s i n g from b a la n c in g moments a re a m easure o f
th e r o t a t i o n t h a t ta k e s p lace*
fh e moments and. r e a c tio n s a t
B and a t th e f ix e d end, of" each system a r e known f o r ' a u n it
r o t a t i o n : i n a g iv en plan e*
From th e s e v a lu e s th e r e a c tio n s
f o r h g iv e n system due to a unite moment a t B- in a ' g iv e n p la n e
are- computed- and. ta b u la t e d in I a b l e
fh e co m p u tatio n o f change i n r e a c tio n a t G i n th e system
GFCB due to r o t a t i o n in th e X2 p la n e i s ' a s f o llo w s * • • The a lg e - .
b r a i c sum o f th e b a la n c in g moments in th e
p la n e a t B of
. •>
'
system- GFCB as g iv e n in f a b le X lI I i s »54500*0* . The end r e a c ­
tio n s f o r system GFCB c o rre sp o n d in g to a u n i t moment in th e
XZ plane- a r e ta k e n from T able XIf-*.
the, r e a c t i o n s a re
T herefore* th e changes i n
-
■
F3e $ (*0019 40^ 0) (-54500 ^)- = *1050
F y
*.
( * 0 0 0 5 2 0 / * '0 )
( -5 4 5 0 0 * 0 )
=
-
2& ^
Fg ; (;0 0 4 2 5 ^ /" ^ ) (-9 4 # o " 0 ).. = -831#
’
In T able VII* th e changes in th e r e a c t i o n s fo r ea ch system a r e
ta b u la t e d , and from th e s e th e r e s t r a i n t s a t B a f t e r r o t a t i o n
are
= +5768^ and F% = +15099^*
T able XIVi
End B e ae tio n g i n Pounds Due to a p o s i t i v e U n it
Moment'1' a t B of* Saoh System ' w ith lib . T r a n s la tio n
of B
'
1V
s.
.11
<
*y* * +1
" +1
cb
5
^'00626
6
0
0 ■
0
0
*.00626
,0
. +«00704
'0
0
. -+00860
0
• 0-
O
- ..0109 4
Il
M
»X2 * +1S
S z - +1
O
**000789
*.00358
- +1
t/0Q194
f,0 0 0 5 2
.+*00423.
-.0 0 3 9 7
+.000681
. +.000017
V
- +1
^Moment In In ch Pounds
*.00490
■
*.000741'
'.
E lim in a tio n ,o f J o i n t R e str a in ts
"Since j o i n t B h a s o n ly tWo d e g re e s o f freedom , th e ex ist-?
in g r e s t r a i n t s a re e lim in a te d by a llo w in g B to t r a n s l a t e a
p o s i t i v e u n i t d is ta n c e in th e T and % d ir e c tio n s *
The change
i n th e amount o f j o i n t r e s t r a i n t in th b Y and % d ir e c tio n s ' .
p ro d u ced b y a p o s i t i v e u n i t t r a n s l a t i o n In th e Y d i r e c t i o n i s
computed as follows*: ■ The j o i n t B o f each system i s t r a n s l a t e d
-a p o s i t i v e u n i t d is ta n c e in th e Y d i r e c t i o n w h ile B i s '
r e s t r a i n e d a g a in s t r o t a t i o n in each p la n e and r e s t r a i n e d '
a g a in s t t r a n s l a t i o n i n th e rem a in in g two d i r e c t i o n s »
The end.
r e a c tio n s and th e f ix e d end moments due to t h i s t r a n s l a t i o n
a r e o b ta in e d f o r each o f th e system s as a lre a d y o u tlin e d * . ‘The
end ■r e a c tio n s a r e ta b u la te d in T able
The r e s t r a i n t a g a in s t r o t a t i o n . i s . s u c c e s s iv e ly r e le a s e d
in each p la n e u n t i l r o t a t i o n e q u ilib r iu m I s -a tta in e d w h ile B
i s r e s t r a i n e d a g a in s t tr a n s l a ti o n *
'This, i s shown in T able
X V ll0 .. The r e a c t i o n s l i s t e d In T ab le XV a re c o r r e c te d f o r th e
amount o f r o t a t i o n w hich o c c u rre d as p r e v io u s ly -described*
These - re a c tio n changes a r e l i s t e d , i n T able XV alo n g w ith th e
c o r r e c te d .e n d re a c tio n s* ,
The change i n th e j o i n t . r e s t r a i n t in
th e Y and 2 d i r e c t i o n s due to a p o s i t i v e u n i t t r a n s l a t i o n i n
th e Y d i r e c t i o n i s e q u a l b u t o f o p p o s ite sig n to th e c o r r e c te d
end r e a c tio n s *
The same p ro c e d u re i s C a rrie d o u t f o r a: u n i t
t r a n s l a t i o n i n th e 2 " d ir e c tio n w hich 'i s th e o th e r d eg ree o f ■
freedom*
T h is in fo rm a tio n i s g iv e n in T ab les XVl and XwVIII*
■ Since' ,th e change in, r e s t r a i n t s produced by a u n i t tran sla* tio n in th e Y and 2 d i r e c t i o n s a r e known and th e r e s t r a i n t s to
be removed An th e Y and 2 d i r e c t i o n s a r e know n/' th e fo llo w in g
e q u a tio n s a re w r i tte n :
. (I)
.
/ /,v
Fy + AYFyA%=l + AgFyAB=I = 0 . ,
(2 } ■ P2 -f AYFgAY=I + h ZP2a Z= I a Q
■f
:
‘
.
i
^'
' \
.
.'V: "
EABlS XV
: End Reactiono In Pounds Duo to AT® +I*4 Corrected For Rotation
Correction Due to Rotation0
Due to
At A
AT-= el*
1S
&
At B
&
FT
•
- Es
At G
&
v
:
E3 ■
eV
5*1
»136100
mSZ=
+1
mSSb
*18400
W
+1
Tyzc
-81200
Corrected
/1 = 1
0
0
0
0
O
0
0
+ 102
- 2200
e®00335
* 788
0
0
0
0
-1413
0
0
0
-.00825
- 115
0
0
- 115
Due to
AT® e l*
tXFgi +1
*35100
0
eo00704
* 247
-11750
0
0
0
0
-9180
0
0
0
Due to
AT® el*
Msy^ e l
-14?
-.000789
- 49
*.00194
* 23
*.000017
-
I
— 174
-340
-.00358
-222
*.00052.
*
-.00397
*131
- 435
- 46
*.00433
* 51
*.000381"
- 30
— 134
- 99 -.000741
Txy-
mZEFc '
*62000
Ms3= *1
—.00860 .
Mzz=
*20400
Myz=
MyZ= *1 -720700
- 175
0
0
* 72
-.01094
*7880
-3870
0 -.00490
*3530
—
5650
mXZ=
Uxzc *1 *13000
6
, * Rotation e ffe c t given in terns o f moment in inch pounds®
Tyz= +1
Tyz=
^•44000
tPftgLTg xvi : End Hoadtione in Bounds Due to AZf= *1* Corrected 2?or Rotation
Correction Due to Rotation* At A
Due to
AZ= *1
At G
&
Tyz= *1
Corrected
Tyz0
-34900
p6Z=l
0
0
0
0
0
* 146
O
•t-o00625
-55
o
0
0
0
-
•2300
0
0
-O 00625
*333
0
0
-1867
Due to
AZ= *1
Txy= *1
v
-
-2400
Mjjz= *1
Mxz=
-58800
55
Myz=
Myzct +1 -309600
0
*»00704
-17
-»00860
*505
0
0
* 489
-9180
0
0
0
0
—»01094
*3387
-5793
-20100
0
0
0
0
-.00490
*1517
-18583
&
Fy
Mxz=
-53200
0
F7
At B
Msz= +1
O
&
*
' M2Jy=
-8800
M xye
Due to
AZ= +1
Msy= *1
-571
-»000789
* 3
*»00194
- 67 *.000017 neglect
-»00358
*15
+o00052
- 18 =»»00297
*56
■— 46
-»000741
*
3
*»00423
-146
-13
-813
-
99
-657
V r
Msa= *1
-4300
Mx a =
-34500
^ Rotation e ffe c t given in terms o f moment in inch poundso
Tyz=
Ty2= *1 -18900
*.000681'
—
635.
T a BLE=XVII: BALANCING FIXED END M OM ENTS
X -Y PL A N E
.
.2 7 8
.5 6 4
Il
F Ifa
- 98
8 OF GFCB B OF EDB BOFAB
+ 747
-2 6 4 0
+ 526
+298
4 1069
- 26
9
2
F
+
4
-
o
F 5
-2 6 4 0
+ 535
91
2
-
F
-
52
7
F 18b
F
93
I
F__ 3
[FIObl
-1 3 7 9
|F fa20*| I +351*
+12611
-2 0 0 9
SYSTEM EDB
CARRY-OVER FACTORS
Exy= -.325
E Xz * - .211
Bf - .6 3 3
F
I
B OF GFCB
- 143
- 65
F 94
22
- 67
I
- II
F 26
O
0
AT B
Y -Z
PLANE
SYSTEM GFCB
CARRY-OVER FACTORS
G yz ” —.4 91
G xy = F .224
B xy - + .668
Gxz = + .0501 •
Bxz = F .I5 2
:______ .2 3 6 .3 6 3
.4.01
G I------------------- .052 .096
.8 5 2
B OF EDB B OFAB
- 189
+ 159
+ IFF
- 33
F 45
F 72
F I 84
+
F
F
F
235
147
38
216
F 25
F Il
O
F 40
|~ I 6 6 |
F 92
| F I20*| I + Z 04*| I +184*
SYSTEM EDB
CARRY-OVER FACTORS
Exz = + 0318
- .6 6 4
Bv
+ 672
B OF GFCB
F 136
F 77
F
2
-439
F
B OF EDB
+ 8230
BOFAB
-7195
-
SM
F BH
- 812
+ 812
13
I
I
-211
-440%
- ____
12
41023
-812*
-7207«
SYSTEM EDB
CARRY-OVER FACTOR
Eyz = - .157
-.161
91
-
+ S
63
-2 9 5 0
+ 1130
17
+
Il
I
+
106
30
2501
NOTE: M ULTIPLY
F SB
+ 8
-
- Z94
-
i ______
n
.158
F 9fe
IN -FY DIRECTION
SYSTEM GFCB
CARRY-OVER FACTORS
Gxz= -'.0 0 9 4 3
G yz = F .4 0 3
Byz = + .0 2 5 3
G xy - + .17 1
B xy = - .0938
SYSTEM GFCB
CARRY-OVER FACTORS
G xy = - . 0 2 0
Gxz = F .0 1 5
Bxz = - . 1 2 4
G yz = F .2 8 0
B y z = F .1 4 7
I
D U E TO A UNIT TRANSLATION
X -Z P L A N E
E
ALL MOMENTS BY 100.
-
68
2
■1818
E
* INDICATES MOMENTS DUE TO ROTATION
.
TABLEJWIH BALANCING FIXED END MOMENTS DUE TO A UN IT
X -Y - P L A N E
X -Z
SY STEM G FC B
CARRY-OVER FACTORS
G x r = —-0 ZO
G x x = + -0 1 5
B x x = - • 124
G yg = + .2 8 0
B y z = + -IA -T
-5 4 2 .
+
I
60
4 2.
O
+
1
•5 6 4
FLEXURE '
,
f
B OF CFCB B OF EDB B OF AB
+ 154
43
24
87
+ 3 3 +
96
-IZfe
I
O
2
Z
O
O
+
t
+
I
Y -Z
-
I
[+
io l
PLAN E
SY STEM Q F C B
CARRY-OVER FACTORS
G y z = —.4 9 1
G xy = + • 2 2 4
B x y = + 668
G xz = + -0501
B x z = + 152
B OF GFCB 6 OF EDB
-1 1 6 6
+
5
15
+
- 352
- 600
29
O
O
+
+
7
IZ
FLEXURE
.0 5 2
E.
--------- :-------------
B OF AB
+2640
+2640
- 542
- 27 I
+
10
+
5
F T s iil
-5 7 3 I
1+2108 I- 1+23-74 I
1 -3 4 5 * 1
-5 8 6 * 1
1 -5 3 2 * 1
- 614
12
- 143
+ 93
- O
+
3
I" 6 7 3 |
B OF GFCB
- 31
fe
9
- 189
O
O
|- 2 3 5
.0 9 6
.8 5 2
B OF EDB
+ 3680
-3 0 9 6
S
V)
JL
1 -8 8 * 1
+
IT
I
3
9
O
0
A T B.
I
S
1 -2 4 * I
44
?
- 43*|
I+-
-
_L
l& |
+
Si
1+
+ Z DIRECTION
PLAN E
.3 6 3
Z36
.4 0 1
Z- a
-IS S
JL
| - fe 4 2 |
IN
SYSTEM G FC B
CARRY-OVER FACTORS
G x z = —. 0 0 9 4 3
G yz = + 4 0 8
B yx = + -0 2 5 3
G x y = + . IT I
B x y - - .0 9 3 8
r-A _______________
3
TRANSLATION
TORsioH
tr .
---------=2i^---------1 A
B OF AB
- 349
E3 4 9
I
I
I
SY STEM E D B
CARRY-OVER FACTORS
E x z - 4". 0 3 1 8
664
C xy =
Ifel
B xy “
S Y S T E M EDB
CARRY-OVER FACTOR
C y 2: B — 157
+
-
+
8
+ 398
+
O
—
8
" 5
19
O
O
-1 1 9 5 0
+ 486
■
-
1+3981
.
E
NOTE: MULTIPLY ALL MOMENTS BY IOO.
>-
~
14 I
E
* INDICATES M O M E N T S
L
*77>
-
D U E TO ROTATION
|
- 349*|
SY STEM E D B
CARRY-OVER FACTORS
C x y = ~ .3 2 !
E x z = - .21
B Xz = “ . 6 3 3
.
+ 349
-1 1 4 6 4 )
[+ 3 4 9 I
S u b s titu t in g th e v a lu e o f th e r e s t r a i n t s in th e -eq u atio n s g iv e s
6762 + 5707AT +
5894AZ
15096 4- 5889AT * 21265A% = 0
Which when so lv e d y i e l d Alt = -^587 and AZ = »«603 and q o rre s*
f
pond to th e amount o f t r a n s l a t i o n o f B i n th e I and Z d i r e c ­
tio n s r e q u ir e d to e lim in a te th e r e s t r a in t s .
,Final. R e a c tio n s and Moments'
The c o r r e c t io n to th e end r e a c t i o n s due to a llo w in g j o i n t
.B to t r a n s l a t e a r e o b ta in e d when th e v a lu e s l i s t e d in. T ables
XV and XVl a re m u lt ip lie d by AT and AZ r e s p e c tiv e ly #
T ab le VH
shows th e f i n a l end r e a c t i o n s , ■
The c o r r e c t io n s to th e moments shown in T ab le X l l l j dub
to a llo w in g j o i n t B to t r a n s l a t e # a r e o b ta in e d when th e b alan ce
ed momenta shown in T a b le s XVZl and X V IIl a re m u lt ip lie d fey
AY and A2 r e s p e c tiv e ly *
The f i n a l moments a re ta b u la te d in
Tdble XIX,
Method I I
From th e r e a c t i o n s due to ex p a n sio n , th e r e s t r a i n t s
a g a in s t t r a n s l a t i o n a t B a re e v a lu a te d and are;,
F y = +11376#
and
PvV = +17858"^
These r e s t r a i n t s a re e lim in a te d by a llo w in g B to t r a n s l a t e i n
th e Y and Z d i r e c t i o n s s in c e j o i n t B h a s o n ly two d e g re e s o f
freedom s th e r e s t r a i n t a g a in s t r o t a t i o n i s m aintained#.
The
change In th e amount o f j o i n t r e s t r a i n t in th e Y and 2 d i r e c t
t i o n s pro d u ced b y a p o s i t i v e u n i t t r a n s l a t i o n i n th e Y
d i r e c t i o n .i s computed as fo llo w s^ , The j o i n t B o f 'each system
i s t r a n s l a t e d a p o s i t i v e i m l t d is ta n c e i n th e Y d i r e c t i o n w hile
B I s r e str a in e d a g a lh st R otation In each p lane ahd r e str a in e d
a g a i n s t ' t r a n s l a t i o n i n th e re m a in in g ■two d i r e c t i o n s b
W e end
r e a c tio n s and th e f ix e d end moments due to t h i s tr a n s la tio n '- 1
are- o b ta in e d f o r each sy stem as .p re v io u s ly -o u tlin ed ,4 ' W e end
r e a c tio n s are l i s t e d , in . Table X? end from th e se th e r e s t r a in t s
a t B are
.
•
s
.
142900
and
Fg^Y=I ,
,
S im ilarly* -’t h e change ih t h e amount o f j o i n t r e s t r a i n t , in th e
Y and % d i r e c t i o n p ro d u ced by a p o s i t i v e u n it, t r a n s l a t i o n in
■J
th e -E d i r e c t i o n a r e computed*, _ They a re ?
_
9 2 7 9 #:
, ■;
and •. •
. w
_
22957#
S ince th e change i n r e s t r a i n t s 'p ro d u ced by a u n i t t r a n s l a t i o n
.
i n th e Y and Z d ir e c tio n - a re known.and th e r e s t r a i n t s to be f e f
moved i n th e Y and Z d i r e c t i o n s a r e knownj, th e s e v a lu e s a re
S u b s titu te d i n t o ' e q u a tio n s I and 2 end so lv e d f o r AY and AZ*1187& + 1429QAY +
/
9279A& = O
9279AY + 2 2 9 6 7 6 2 ^ = 0
AY = ",697"
" 'lt
... ■
A& ? *9.616%
T hese a r e th e t r a n s l a t i o n s r e q u ir e d to remove th e r e s t r a i n t s a t
B w h ile B is. r e s t r a i n e d a g a in s t r o ta tio n ^
T able XIXl . F in a l MQiaentg Im Inoh Pounds
c o r r e c t io n For
T r a n s la tio n
Moments
from
' '
T ab le 1 2
t m ^ ’1
■,
•
«4
4
.
«
■S ' .
■■
4
,
■
00
-
+77700
-
41800
■
-
•f
57500'-
■■ ■
-5 1 4 0 0
+
2710
'
■ -1 4 5 2 0 0
80410
*188560
. . •-
21000
+
*049829
6100
9880
: *
84000
+151100
+
8030
+
844
-7 4 8 5 0 0
+70400
*408800
194
■’ +
58700
*670294
1700
**
600
+213900
-5 5 5 5 0 0
*«
'
5560
+,
■' +
^xy
. V
til
j-- ' .
F in a l
Moments
taiGBOO * , ' -
.
+691000
+154574
+
.1 2 9 0 0
*145600
+ 40600
*168209
- 8$000
M
va
E f f e c t o f T r a n s la tio n
' ‘
. The r e a c t i o n s due bo ex p an sio n a r e c o r r e c te d f o r th e s e
t r a n s l a t i o n s i n T ab le ZX- ' The momenta a t th e f i x e d ends due
to ex p an sio n a r e c o r r e c te d f o r t h e s e t r a n s l a t i o n s In T able ■
XXI* .
R eleasing; R o ta tio n R e s tr a in t s
To remove ■th e r e s t r a i n t ,ag ain st, r o t a t i o n a t B i n a g iv e n
p lan e* "the j o i n t B i s f ix e d a g a i n s t t r a n s l a t i o n and allow ed to
r o t a t e u n t i l r o t a t i o n a l e q u ilib r iu m i s a tta in e d *
A fte r r o t a ­
t i o n , th e r e s t r a i n t s - a g a in s t t r a n s l a t i o n w hich d ev elo p ed d u rin g th e r o t a t io n a re removed, by l e t t i n g th e j o in t tr a n sla te *
The moments r e s u l t i n g from th e t r a n s l a t i o n a r e th e n a p p lie d to
th e s t r u c t u r e a# a c o r r e c tio n f o r tr a n s la tio n * ,
The c o r r e c tio n
TABIE
XX
: End Reactions in Pounds Due to Expansion Oorreoted For Translation of B With B
Restrained Against Rotation
Correction For Translation
Due to
Expansion
&
.
«4
*9209
0
rz
.
0
AY= *1"
0
-5
-0868x10 BI
0
AY= *!”■
AY= oo397*
0
+8800
* 874
0
0
+ 874
+ 1354
+1354
0
AY= -.397"
Fy
•10730
-5
-463x10 BI
+4660
Fz
-15870 :
-362xlo”5 BI
. *3650
&
ti>
Fz -
Corrected
For
Translation
0
> 5130
AY= *1”
AZ= -,615"
0
&
0
AZ= +1"
0
AY= -,397*
-5
-.0868x10 BI
AZ= *1"
0
AZ= -.615"
0
-5130
-5
-£63x10 BI
+.5650
420
r.792xl0“SEI
+12360
♦ 140
AZ= +I*
AZ= -,615"
-4079
-0058 x10"5EI
* 58
-5
-0225x10 BI
*351
-3670
- 646
-5
-0134x10 BI
*135
-0039x10 BI
♦ 61
- 450
»1988
-0039x 10"5EI
+ 39
-0259x10"5BI
+404
-1545
'
.
T&BI2 XXl
$ Flgcd End Moments In- Inoh Founds Due to Expansion Corrected For Translation
n ith B Restrained Against Rotation
■-
9
I
II
i
«
<
<
<
O
-264000
♦104800
P
0
♦104800
O
0
0
♦264000
-162400
-162400
^ys
Msy
15SS
O
O
O
0
0
0
0
0
-264000
0
♦104800
0
0
♦264000
0
-162400
♦104800
-162400
%s
O
b
0
0
0
0
Msy
Bgs
Msy
3
r^xz
Myz
Msy
i
S
I
I
4
Corrected
For
Translation
AY= -,397*
-
PQ
9
Correction For Translation
AY= +1*
-
CO
Due to
Expansion
Mss
%yz
cb . Msy
TXS .
9
Myz
.
AZ= ♦!*
AZ= - o 615*
AY= ♦l*
AY= -0397*
- 96000
♦462100
♦502100
0
0
♦823000
0
0
-327000
6
0
♦368000
0
0
=226000
- 96000
♦462100
♦ 39100
«396900
0
0
0
0
-396900
♦154000 - 7
0
. -828400
-295000
0
♦117100
0
. -1195000
0
♦735000
♦154000
♦ 23700
AY= ♦l*
AY= -,397*
AZ= ♦l*
♦ 96500
-226500
♦ 5510
♦ 74700
- 14270
♦ 13600
- 29700
♦ 5670
— 5400
-
-392500
♦217300
-151100
♦ 9610
-
♦ 5770
♦ 83500
o
AZp ♦l*
AZp -o 615*
♦ 15420
-116600
8
03
8
AZ= -o 615*
3140
- 9500
♦ 71700
♦ 1930
♦ 57300
-149100
♦ 2040
3820
- 54200
♦ 33300
-363000
2290
9330
♦ 1675
- 61400
- 1030
♦ 37800
♦214000
-122700
"
. •••
-'
^
moments r e q u ir e d to e lim in a te th e r e s t r a i n t s a g a in s t trams*
l a t i o n r e s u l t i n g from ■a u n i t moment change 'a t j o i n t .S in a
•
•
,
g iv e n p la n e a r e c a l l e d s h e a r c o r r e c t i o n f a c t o r s .
Shear. C orrection .PdOtors
•;
To e v a lu a te th e sh e a r c o r r e c t io n f a c to r s ^ th e j o i n t B i s
allowed, to r o t a t e S e p a r a te ly i n each p la n e an amount C o rre sr
ponding to a u n i t moment w h ile S1 i s r e s t r a i n e d a g a in s t t r a n s ­
la tio n .
T h is i s shown i n f a b le XXlIs
fh e r e s u lt in g th r e e s e ts
o f end r e a c t i o n s "and t h r e e ’s e t s o f r e s t r a i n t s a t B a re e v a lu a t­
ed a s Shown i n fa b le . X X llI.
fh e t r a n s l a t i o n s r e q u ir e d to e lim in a te each s e t o f re *
s t r a i n t a a r e d e te rm in e d by u s in g e q u a tio n s I end
fh e ' t-rans*
la tio n S : r e q u ir e d to e lim in a te th e r e s t r a i n t s due to Mx^r = -H a t
B a r e d e te rm in e d as fo llo w s z
**00865 +. 148906% * 9879A& = 0
>>000206 f 92796Y * 229576Z = 0
•
AY = +2>,48x10*^
AZ =.& ,087al0~?
f a b le XXIf shows th e t r a n s l a t i o n s r e q u ir e d to e lim in a te each s e t
o f r e s t r a i n t s if
fh e moments c o rre sp o n d in g to each p a i r o f d e ­
f l e c t i o n s ,are ta b u la te d in f a b le XXf* . These a re , th e sh e a r
c o r r e c tio n f a c t o r s .,
TABLE. XXH’.EFFECT OF A T UNIT MOMENT CHANGE AT JOINT B IN EACH PLANE
X -Y PLA N E
X -Z PLANE
C A R R Y -O V E R . F A C T O R S
GFCB
ED B
G xy ” - . 0 2 0
Gxz. = + -O l 5
E x z = — «21 I
B xz ■ —.6 3 3
G YZ = + •2 8 0
B YZ - + . 1 4 7
Exy =-3Z5
FOR
A
xy
C A R R Y -O V E R
AB
= +• 5 0
BxZ.- —.124
FA C TO R S
EDB
E xx = + , 0318
E XY — — . 6 6 4
B X y = — • 1,6 I
GFCB
G x z = —. 0 0 9 4 3
•GYZ=+ 408
B Y%* + « 0 2 5 3
G * Y =■ + • 17 1
B x Y ——. 0 9 3 8
Y - z:
FOR.
pla n e
C A R R Y -O V E R FACTORS
G FCB
EDB
AB
Axza"**•
FO R
E y z 31- - 1S ?
G YZ 5 —. 4 9 1
AB
-I
G XY= + - 2 2 4
BxY= +.663
G x %* + .O F O l
B v z = +• 152
+ U N I T M O M E N T CHANGE AT E>
i ____________
- .0 0 5 5 6
.278 J1 .564
.158
+ .2 7 8
+ .1 5 8
+ .5 6 4
:---------- j A
+ .2 8 2
G|+.00417
.0345
-.1 0 0
.0514
6F
-.0 4 0 3
-.0221
-.0 6 45
+.0779
+ .0 4 0 9
-.0 3 3 4
+ U N IT M O M ENT
CHANGE AT B
GF---------
.236 ^ .3 6 3
.401
- .0 0 2 2 2
+.236
+.401
-Z66
+.363
-6
-Ia
a
+.181
+ .0 9 6 4
+.00596
+ .0127
E
+UNIT MOMENT CHANGE AT B
-I*
<T
+.0116
+.0347
+ .0 0 2 6 0
E„
+ . 0 0 791
i _______ :____
-0 2 .5 5
E
: .052 J .096
.852
+ .0 5 2
+ .8 5 2
+ .0 9 6
- .1 3 4
:---------I1 a
-.0 9 6 .
lEfeBIS xxut
* End Reactions and R estraints at B in Pounds Due to a P ositiv e Unit Moment in Inch
Pounds Applied at B u it i B Fixed Against Transla t ion
At A Of AB
% = +1
At E o f EDB
Mgy=+«564
*
O
>
V
.A
0
+1
+ .0 0 7 0 4 '
Msy = + .2 7 8
Restraint
at B
-.0 0 0 7 8 9
-.0 0 0 2 1 9
-.0 0 0 8 9
Ts y = +o158
Ms y = +1
+ .0 0 1 1 1
- * o00825
+•00353
0
0
- .0 0 3 5 8
-.0 0 0 9 9 5
-.0 0 2 5 3
0
0
0
0
-.0 0 0 7 4 1
-.0 0 0 2 0 6
+.000206
At A Of AB
At E of EDB
Ms z = + .3 6 3
0
0
0
0
-«00825
-«00227
Ms a = +1
At G o f GB1CB
Ms a = + .4 0 1
m X z T -
+1
.
1
Ms a = + .236
Restraint
at B
-.00345
+ .00194
+ .000458
+.00299
0 .
0
+ .00052
+ .000123
-.0 0 0 1 2 3
0
0
+.00433
+ .000998
+ .00127
- .0 0 8 6 0
)
'i.
FZ
At A Of AB
Ty z ° +1
At E of EDB
Tya= + .0 9 6
My2 = +1
At G o f GFCB
My z= *»852
Tya= +1
Ty2= + .052
Restraint
at B
< rt
>
Fz .
0
0
Fy
0
FZ
0
0
0
O
-•0 1 0 9 4
0
-« 0 0 4 9 0
+ .000017
+.00000086
-.0 0 0 0 0 0 8 6
- .0 0 9 3 2
-.0 0 2 9 7
-.0 0 0 1 5 4
+.00947
-.0 0 4 1 7
+ .000681
+ .0000354
+ .00413
46 =
&
V
At 0 o f GFCB
T able M lV i . T r a n s la tio n s R eq u ired to E lim in a te th e R e s tr a in t s
Due to a W i t Moment i n In ch Bounds a t B
'
%KZ '
'
AYri-
at B
^yZ =
^
^
+^607x10^
A Z t?.
-1,0 8 7 x 1 0 *
79SXlO"7
tl? 1 8 8 x l0 ~ 7
F in a l Moinmis and H saG tlons
' ^
In !!able XXVI th e moments c o r r e c te d f o r tr a n s la tio n .; a re
balanced s u c c e s s iv e ly i n each p la n e u n t i l e q u ilib r iu m I s
a tta in e d ,
A fte r jo in t" B- is. allo w ed to r o t a t e , In a given.' plane*
th e sh e a r c o r r e c tio n I s a p p l i e d ■to e lim in a te th e r e s t r a i n t
a g a in s t t r a n s l a t i o n w hich d ev elo p ed d u r in g .'r o ta tio n s ■ The
f i n a l moments a r e o b ta in e d b y ad d in g th e columns in T able XXVI*
The end r e a c t i o n s shown .In^T able XX m ust be c o rre c te d ' fo r.
■ ' •
■
A
■th e amount o f r o t a t i o n and f o r th e amount o f t r a n s l a t i o n w hich
"■ ■
.
.
o c c u rre d during, th e moment, and s h e a r1 b a la n c in g shown in Table
XXVI,
S in ce th e moments a t B f o r each system w hich c o r r e s ­
ponds to th e amount o f r o t a t i o n a re known and s in c e th e end
r e a c t i o n s due te a u n i t *moment a t B a r e knom y th e - c o r r e c tio n s
to be a p p lie d due to r o t a t i o n a r e computed and ta b u la t e d in
T able XXVlIli
In T able XXVIl a r e l i s t e d th e end r e a c tio n s
c o rre sp o n d in g to th e t r a n s l a t i o n r e q u ir e d to r e l e a s e th e re**
s t r a i n ! a g a in s t t r a n s l a t i o n due to a p o s i t i v e r o t a t i o n a l u n i t
moment change a t j o in t B«
These v a lu e 8% m u lt ip lie d by th e .
t o t a l r o t a t i o n a l ' moment change w hich o c c u rre d ^ y ie ld s th e
TABLE
XXV
Shear Correction Factors
" —*
U3cy = + I a t B
Mxz = +1 a t B
' "Al =
AZ=*
„
Shear
*2'.lt8xl0~' -1.087x10"' C orrection
V
m
0
-.0655
Mxz
0
§
Tyz
0
0
I
V
-.0655
0
-.0287
M;yz = +1 a t B
AT=
?
AZ= _ - 7
Shear
+.607x10"1 -.796x10 1 C orrection
-.01602
—.0655
-.0287
•
0
0
-.0210
AT= _7
AZ=
_7
Shear
-7.1)0x10
+1.188x10
C orrection
-.01602
+ .1951)
-.0210
0
0
0
O
-.01602
+ .1931)
0
-.0210
0
1S
».<!
$
-"ncf
'• §
M
i
.
8
s
is
0
-.0287
0
-.0210
+ .0311)
0
+ .1951)
+ .0311)
0
0
0
0
0
0
0
Txy
0
0
0
0
0
0
0
0
0
uXZ-
0
0
0"
0
0 •
0
0
0
0
OliO
+ .161)
1V
TXZ
+.20!)
0
0
T -*
-
0
0
+.0500
-.0293
+.0207
-.6 0 9
4.01)37
-.565
0
0
•0
0
0
0
0
0
0
0
0
0
0
0
.
1Vz
-.0732
+.1299
+.0567
-.01791
+.0931
+.0772
+ .218
-.11)20
+.076
V
+ .01853'
-.001676
+.01685
+ .001)53
-.00123
+.00330
-.0 5 5 3 ;
+.001832
-.0 5 3 5
+.01267
+ .00913
-.000866
+.00928
+ .0081)1
+.01056
-.01385
-*00329 ■
u XZ
• -.00351)
Tyz
+.60337
+ .00031)1
+ .00371
+.000826
+.000250
• +.001076
-.01006
-.000373
-.0101)3
+.00238
+.00589
+.00827
+.000583
+ .001)31,
+iOOl)89
-.00711
—.0061)1)
-.01355
+ .0011)31
-.000182
+ .00121)9
+.000350
-.00013:33
+.000217
-.001)27
+.000199
-.001)07
+.00583
+.00667
+.01250
+ .0011)26
+ .001)89
+.00632
-.01739
-.00729
-.021)7 ■
I
m
—-p.
-.0287
-.01602
-.0655
0
+ .0311)
0
^yz
g
0
0
+ .0311)
+ .1951)
0
V
X '1'
I
mXZ
-0
0
TXZ
'
•*49**
T A B L E X X V I: M O M E N T
X -Y
AND
SH E A R .
PLA NE.
X -Z
CARRY-OVER FACTORS
QFCB
EDB
AB
G*v ■-.020
A * y " + .s o
G *t • +.015
E * z - - .2 1 1
A * % " - .I 2 4
G y i-+ .Z B O
By i. +141
IZlB | 564|
BOfGfCB B of EOB
-SbSO
+ 513
-9 t> 0
- bl
+ 31
+91
Tr
5T
♦
5
-2 2 5
-1 2 6
-- IZt - I4T
- 1I1+
♦- 5St +
Ot
- 3
+
6T
2
|. m
4 ^
+ 24r
- 451
BfTGFCB BOf EDB
51T + 53
-
19T
39+
+
2T +
2T
-
ZZ t -
ZZt
3 T
I
+ Z+
- I
+
- IIt
+ It
+
fe
+
+
0
+ Z
1-31051 |+ 3 8 l I | - 9 1 8
It
l>
— 4T
— 4t
-
Zt
- Z t
-
It
+•
5
IHtARCOAKECHOH
FACTORS FOR +
UNIT AM xy AT B
-.0 6 5 5 B x y 'A B
- .0261 B » x -A B
- 0655 A xy
- OiST A . 1
t.H>4 B r r -EDB
+.0561 E yz
+.0lb&5 B xy -GFCB
+.00911 Bxz-GFCB
+.00111 B YX-GFC B
+.00627 G xy
+.00125 G xz
+•0125 Gt z
Ot
0
Ot
0
Ot
0
0
0
0
0
0
0
0
-
1+
-
I
Ot
0
Or
0
0
I
0
0
o
o
0
-
55
Gt
-
SO
-
-1221
- 1*5
+
-
-
-
ZT
31 +
-
33
3T
-1 3 3 +
9T
6+
25
+
+
-
63
T
-
- It
+
+
+
-
-
I t
- X t
20
9
- H
5
5T
13
OT
- 5
+
- 2
-
3 T
- 95
+ 63+
- 55
2
- 32
O
- ___I
3feT
+
-
3+
20
I- 3 M * | I - W T * | |- 5 9 4 « |
1-1450 I | -
I |- 4 4 | |+44|
|- 2 3 » I | - 6 9 2 * I I- 4 4 * I
I-3490I
MOTE'MULTIPLY ALL MOMENTS BY 100.
+
+
+
+
+
+
+ 1540
19
+ 21
Z
.
2 31
I IfeT
46+
21
15 +
IIt
15
6T
9
5T
5
3T
IT
3
It
2
r
1
0
1
I .IS 4 S |
* INDICATES MOMENTS DUE TO ROTATION.
2
3
46 I |+ 9 Z
2
- 39 4 ,9
+ 40 I
+ 42
+
31
I
+
+I
-♦ fe
4
SHEARCOtAECTION
FACTORS FOR +
UNIT A M x z at B
+ 1954 6 , r - A6
+.0314 B*x AB
+.1954 A xy
+.0314 Ax r
- .5 6 5 B y 1 EDB
+.076 E y x
-.0 5 3 5 B xy GFCB
-.0 0 1 2 9 Bxz-GFCB
-.01043 Bt z -GFCB
-.01355 G xy
-.0 0 4 0 7 G ,,.
- .0 2 4 1 G y i
SHEAR COkRECTtON
FACTORS FOR +
UNIT A M ,i AT B
-.01402 Bxy ' a&
—.021
B *x - A B
-.01602 Axy
-.0 2 1 A m .
+ 0201 B y z -EDB
+.OTTt Er r
+.00110 Bxy -QFCB
♦-.00841 Bx l GFCB
..OOlOTb Br r -QfCB
+.00489 G xy
♦ .000211 G xz
+ 00632 G t Z
-
2
-
+ 13
|- I 6 T T |
.+'9
-no
1_T +
2+
I
I+
2
O
0
0
O
0
BOFAB
♦ 391
X+
3
+Z
l+ a tv I I-IM t I 1+40+5 I l - m * !
AB
YRb - 1
I05%I 096 I
I 652I
BftftfCBftOFEDB
-1 6 2 4
- 213
+ 32 +
-
a
G x z - +.0501
B x r - + .1 5 2
-
-
-
Ey1" -157
0
| | + 5 9 1 | [+ 8 1 4 |
| - 2 n * | [-1 2 4 * I |- 4 4 l » I
+
Ir
-3 2
-1 6 2 4
- 54-1
EDB
Gxv • + 2*4
B*y • +.GgB
B OF AB
+ 4421
♦ 0I -1491
- 355 - 6 0 4
- I3T
3
26 + 81
- 1+ -+
- ZIt
PLA NE
CARRY-OVER FACTORS
Q FCB
G yz - -.4 9 1
|
+2140
♦ Z4T
- 2Z9
+
-
Y- Z
4 *
B Of AB
+1046
+1046
-
+
-
RLAM E
CA RRY-OVER FACTORS
GFCB
EDB
AB
G x z - - 00941 E kz " + OBia A x z - +-50
G y z - + .4 0 6 Exv■ -.4 6 4
B y z -+ 0233 Bxy - - .IGI
G * v - + .H l
B ky ■ - .0 9 3 6
Cky--.325
Bxz--GlS
-
BALANCE
,
T INDICATES
1
+ 94 I
SHEAR CORRECTION
SABIE XXVit
__________
: Ead Rsaetlons in Pounds Due to !EcanoIatIon Required to Eliminate Restraints uhon
Joint B Rotates on Amount Corresponding to a Unit Moment in Inch Pounds
Msy= -6-1 at B
'—
AY=
Mss= .* ! at B
AZ=
AZ=
-7
-7
»o607x10 ».796x10
AY=
-7
-7
>2,46k10. =»1,037x10
O
&
<
-
&
4
.
O
-0000356
-000546
O
-000546
O
*000240
<#00240
O
;
*1 &t B
AY=
Z=
-7
-7
-7,40x10 *1.188x10
ZF
0
0
-0000366
0
0
-.0000412
-.0001337
0
-0001337
*.001629
0
*001629
0 *0001753
#001753
0
-000261
-000261
o
0
0
0
0
- 0
0
0
&
-.00291
*»000999
-,00191
-.000713
*.000731
*.000018
*,00869
-.00109
*.0076
&
-o 00228
*,00219
-.00009
-.000557
*.00160
*.00104
*.00679
-.00238
*.00441
yX- -o 0000365 *,0000621 *.0000256 -.00000393 *.0000455 *.0000366 *.0001089 -.0000677 *.0000412
I
-o 0000245 »,0000715 *,000047
O
& -o 0000843 *,0000103 -.0000735 -.0000206 *.00000788 -.0000127 ».000352 -.00001172
I
___ 6__
t5
-.00000301 *.0000523 *.0000463 *.0000732 -.0000780 -.0000048
: F i n a l Ebd B o a c t io n s i n Pounds
Before
Ifcaneht
and Shear
Balaned .
\ ./
&
<
<
Fy
F2
Correetion For Rotation* "
-44100
*8800
* 70
* 874
-275
*1354
0
O
*371
mXZ=
-65500
. mSZg
-163400
mJZ=
-45900
Final
Roaetiono
0
* 2
*
6
* 2
*8392
O
* 43
* 22
- 75
* 590
0
- 19
-29
* 12
*1689
mJZg
-39200
& yG
-78200
mKZ= '
-163400
Myz= .
-45900
V
.V
-5130
- 87
*563
- 420
O
O
*429
*149
-
F3
. * 140
O
O.
*192
*
4sy=
-21700
' mXZg
-38500
v °
-2300
-3670
* 17
- 75
hogleet
e»
2
• ■w- Q
- 2
-3738
« 450
* 78
- 20
*7
*
6
* 2
-11
- 388
-1545
* 16
-163
-2
-
4
- 8
-O ■
V .'
Fz
O
0
,
7
mS3T
g
-78200
0
0
3
-349
-170
-202
-
mKZg'
-163400
* R o t a tio n and T r a n s la t io n e f f e c t g iv e n i n toasns o f moment i n Inoh pounds*
-4654
I
&
JS
-488
%zyG
-78200
V d
; -4400
I
At E
' W
-12400
■ mSZ0 .
-59400
Correction For Translation*
33
' ■ “yz=
-45900
neglect
-1706
TS-
TABIE
-*
6 2
■
o o r r e c tio n :due to t r a n s l a t i o n and ape ta b u la te d . I n , f a b l e .
XXVlll aloiag w ltli th e f i n a l end r e a c tio n s 6
C onclusion
fh e soI n t Io n o f t h i s ty p e o f s t r u c t u r a l problem i s d i f f ­
e r e n t from th e u s u a l ca se I n t h a t no a tte m p t i s m ade,to' ob~
t a i n w ording s t r e s s e s a s n e a r th e a llo w a b le .as p o s s i b le . ' fh e
p ip in g arran g em en t i s l a i d o u t f o r th e s h o rte s t., m ost economic
cal. r o u t e , .-fhlg. problem th e n r e s o lv e s i t s e l f in to :a m a tte r
o f d e te rm in in g w h eth er o r n o t th e pipe, w ill .tee o v e r s tr e s s e d
or. th e end r e a c t i o n s e x c e s s iv e .
I n a number of; e a s e s ,t h e d e te r ­
m in a tio n o f th e i n i t i a l f ix e d end moments and co rre sp o n d in g
r e a c tio n s a r e so low t h a t i t i s e v id e n t t h a t th e p ip in g la y o u t,
i s s a t i s f a c t o r y . . I f t h i s o c c u rs no f u r t h e r a n a ly s is i s n e c e ss­
a ry 4
Ih e group, r e l a x a t i o n p ro c e d u re can be r e a d i l y a p p lie d to
s t r u c t u r e s s u b je c te d to c o n c e n tra te d lo a d s p ro v id in g th e t o r ­
s i o n a l p r o p e r t i e s o f th e members ,are a v a i l a b l e .
The s u b d iv is io n ,of t h e s t r u c t u r e in to g ro u p s ,makes i t .
W ' I -'
p o s s i b le fo r.m o re t h a n ,one p e rso n to work on th e a n a l y s i s , .
* ,
<
■
.
'
xth e re b y e x p e d itin g th e s o lu t io n .
The Method I p ro b a b ly i s more advantageous, as' a p ro ced u re
f o r A n a ly sis o f a s t r u c t u r e w ith I to 4 d e g re e s o f.fre e d o m f o r
tra n s la tio n .
I f th e r e a r e more th a n 4 d e g re e s o f freedom f o r
/
t r a n s l a t i o n , b a la n c in g moments and s h e a rs a t th e same tim e
~a p p e a rs to be b e t t e r .
/
-
A
E lasiJic area>
A su b sc rip t; XY in d ic a t e s th e e l a s t i c
a re a in th e ,XY p la n e , ■
E
-
i Modulus o f E l a s t i c i t y . i n te n s io n o r com pression
I
F
$ Force*
A -s u b s c r ip t o f Xi, f C
r
r i n d i c a t e s t he
-.JL ‘i n d i c a t e s f o rc e .due
to AY = 1%
I
? .Moment' o f I n e r t i a o f p ip e c r o s s - s e c tio n
1Xx-S I 3e3T? Moment o f I n e r t i a and P ro d u c t o f I n e r t i a o f e l a s t i c
a rea
,
-
J
s P o la r Moment o f I n e r t i a o f p ip e o r e s s - s e c tio n
L
I L ength o f member
M % Moment?
A s u b s c r i p t o f XY^ M o r YZ i n d i c a t e s th e
p la n e i n w hich moment a c ts*
tS
s Torque=
A s u b s c r i p t o f XY3,, XZ o r YZ i n d i c a t e s th e
p la n e i n w hich to rq u e a c t s ,
.
.
Xj>Y$Z
8
• ,
.
i
.
* C o o rd in a te ax e s
i R o ta tio n i,
A s u b s c r ip t o f XYfl XZ o r YZ in d ic a t e s th e
p la n e i n w hich r o t a t i o n o c c u rs?
A
« T r a n s la tio n ,
A s u f f i x o f X3, Y o r S in d ic a t e s d i r e c ­
tio n o f t r a n s l a t i o n .
APPENDIX I I
Development o f th e N e u tra l P o in t E q u atio n s
The tn r e e d im e n sio n a l s t r u c t u r e shown In P ig . 5a w ill be
u sed to d e v e lo p s th e e q u a tio n s r e q u ir e d f o r th e s o lu tio n o f
end r e a c tio n s and moments a t th e f ix e d end due to any lo a d in g
by th e N e u tra l P o in t Method,
+Y
(b)
F ig , 3
T hree-D im en sio n al P ipe S tr u c tu r e w ith Two
F ix ed Ends
The f ix e d end D i s c u t f r e e ; a r i g i d b ra c k e t i s a tta c h e d
a t D and i s exten d ed to an a r b i t r a r i l y choosen p o in t 0, from
which th e c o o rd in a te axes o r i g i n a t e as shown In P ig , 5b,
When any lo a d i s a p p lie d to th e s tr u c t u r e shown in
Fig* .Sb,. th e r i g i d b ra c k e t a t O w i l l have d e f le c tio n s . AX
P
p
p'
p
p
AT and Ag . alo n g witja r o t a t i o n s
A^xz. and a ^ z ? These
d e f l e c t i o n s and r o t a t i o n s o f th e r i g i d b rack et, a t 0 imply,
t h a t p o in t D w i l l a ls o h av e id e n tic a l- d e f l e c t i o n s and r o t a ­
tio n s *
■The- c o n d itio n s shown, i n -F ig s, 3a i n d i c a t e t h a t I) i s
u n a b le to t r a n s l a t e o r r o t a t e *
T h e re fo re i t i s r e q u ir e d to
f in d what f o r c e s #„« F and F and moments M »
x
J
k
xy £« “ a V
w i l l be r e q u ir e d a t 0 to p r e v e n t th e d e f l e c t i o n s a n d ,r o ta ­
t i o n s a t 2> due to th e lo a d in g *
The th r e e d e f l e c t i o n s and th e t h r e e r o t a t i o n s due to any
lo a d can be d eterm in ed * The th r e e f o r c e s and th r e e moments a t
i
0 a r e unknown* th e r e f o r e i f s ix e q u a tio n 's can be w r it t e n . in ­
v o lv in g th e unknowns* th e y w i l l foe determ ined*
U sing th e g e n e ra l method o f in d e te rm in a te s tr u c tu r e s *
th e fo llo w in g s i x e q u a tio n s can b e w ritte n ?
P
X=I + Tdx'T5=I + Zdx2i^
+ m
3) AX' + xax'
xy
t
Hx za^ x s ' 1 .
I
4)
AT
f X dy^
5)
Ag
X=I
+ Xdz
+ Yayr ' 1 , * Zayz ' 1 * >t A y txir' 1 - +
M
Cf=I
1v/1
JZ'
MxzGyMxz=
+ Mygdy
f Tdz
T=I
t Zdaz *1
M.
+
4-
=1
-t V dzayz
= o
6)
O
P f Xd9%y =1 +Yd©Xy =1 t 2d6 Z=1
A 8_l
H- Mx y d 6 ^ * 1
xy
a g . B x a = I
+
M
a a , M ya'l
P
t X d e j^ + m
Y=I
e + zde^^ +
^dEZ'3.
'M
• f ■. ■ .
■' "V 4leJ
“ a*ir* '1''' ”
®
+ V sVax r l
•■ ; The e x p la n a tio n w hich fo llo w s -f03? e q u a tio n 5 h o ld s simi«w
l a r l y f o r th e re m a in in g f i v e e q u a tio n s *
s t a t e d , i t i s re q u ire d - to f i n d f o r c e s
As was p r e v io u s ly
P
and Pz and mo*
,merits Mxyij Mx ^ and Myz w hich w i l l e lim in a te th e d e f l e c t i o n s
a n d '- r o ta tio n s .due t o . th e a p p lie d lo a d ,
Ia c h o f th e f o rc e s .
P a p and W when a p p lie d at O3 w i l l n o t o n ly a f f e c t t h e ,de*
x ' •y•
.'Z
f l e c t i o n in th e d i r e c t i o n in w hich i t i s 'a p p lie d - h u t a lso in
th e o th er two d ir e c t io n s , along w ith producing ah an gle change
o f th e r i g i d b rack et i n each p la n e ,
a p p lic a t io n .o f Mxy , Mxz and
The same h o ld s fo r sh e
. Pa t 0< T herefore AX w i l l be
e lim in a te d "by th e sum o f th e p ro d u c ts made Up o f ' th e a c tu a l
fo r c e s or moments and th e d e f le c t io n in t h e 'X d ir e c t io n due to
a- u n i t lo a d a t O0
U sing th e p r i n c i p l e s o f v i r t u a l work, th e d e f l e c t i o n s
and r o t a t i o n s due to a u n i t lo a d and due to a ‘u n i t moment a t
O can b e e v a lu a te d , le a v in g s i x e q u a tio n s w ith s i x unknowns*
r i g s » 4a th ro u g h 4 f show th e a p p l ic a tio n o f . a u n i t le a d
o r a u n i t moment a t 0» . fhe- moment d iag ram s, p l o t t e d on th e
eom preasion s id e , a r e drawn on t h e f i g u r e s «
These a r e used
w ith th e e q u a tio n s o f v i r t u a l work*
9)
I XA=
J
Im d s/E I
10)
1 x 9 = JMrnds / h l
To f i n d th e v a lu e o f d x F ~ a r e a l lo a d o f u n ity i s ap­
p l i e d a t 6 i n W e p o s i t i v e k d ir e c tio n * and a u n i t v i r t u a l ,
lo a d l a a ls o a p p lie d I h th e p o s i t i v e X d ir e c t io n ,
can he u sed fo r- each loading.,,
I x- dx%=1
‘0 1p
-r& g
'■
Jo1
t
■■ ' : "
r*A p
ll ds/EI + V X 1 ds/G-J 4 I %
P 1
B1Ig-, 4a
ds/11 f
Jr
r @
rB
S
i S
% ..d s / m :+ I Z d s / ^ l 4
D
VC
»■
- •
..
I d t e t h a t ' each i n t e g r a l i n o f th e fo rrn j' y 2dA. w hich r e p r e s e n ts
a moment o f i n e r t i a ab o u t th e 'S axis*.-
W e '- f i r s t th r e e ihte** ':
gr-als r e p r e s e n t th e moment o f i n e r t i a , ab o u t th e % a x is o f th e
o rth o g o n a l p ro j e c t i o n o f th e e l a s ti c ,' area* d s /E I , in th e X f
plane* i f d s / s i i s u se d as GA) ds/GJ can b e r e s o lv e d to
I*: g5ds/EW-
l e t th e f i r s t t h r e e i n t e g r a l s b e r e p la c e d by I 2qeS
th e co n v e n tio n a l-sy m b o l f o r moment o f i n e r t i a ab o u t th e X a x is
W e second t h r e e i n t e g r a l s r e p r e s e n t th e moment o f i n e r t i a
ab o u t th e X a x i s o f the. o rth o g o n a l p r o je c tio n o f th e e l a s t i c
area* d's/EI* in the XZ plane* which w ill be replaced by.the.
-58Il t I N f X DIRECTION AT O
POSITIVE M
AT O
IN +Y DIRECTION AT O
POSITIVE M xz AT O
IN + Z DIRECTION AT O
POSITIVE
FlG 4
AT O
U n it Load A p p lied a t O rig in o f C o o rd in a te Axes
^159*'
Symbol I i 56,
T his w l l l 'mak©
w '%c%
Tcy f i n d .!.the .value Cixy 3 lj, a r e a l ' lo a d o f un iter i s a p p lie d
a t 0 ia . th e 'p o g i t i w X 'd i r e e t i o n aa shorn i n F lg 7 4a and a; ’’
t m i t v i r t u a l lo a d -Is' a p p lie d a t '0 i p th e p o s itiv e - X d i r e c t i o n
as s h o w n 'in ' Fig*' 4b7
Then
'
-■
..
I x dx,Y*l
Bach o f th e s e in te g r a ls - ta k e s th e form o f JxydA w nich re p re ^
s e n te th e p ro d u c t o f i n e r t i a o f an area*
U sing th e conven­
t i o n a l symbol f o r th e p ro d u c t o f i n e r t i a ^ I
t e g r a l s may be r e p la c e d by i t ,
i th e th r e e in*
s in c e th e y r e p r e s e n t th e p ro -
d u c t o f i n e r t i a o f t h e e l a s t i c a re a ' In th e XY. p la n e $ and
'
Y=I
“ **yxy
To f i n d th e V alue o f dx^
a r e a l lo a d of. u n ity i s ap­
p l i e d a t 0 in th e p o s itiv e . X d i r e c t i o n a s ' shown i n F iga 4a •
and a u n i t v i r t u a l load, i s a p p lie d a t .0 in th e p o s i t i v e Z.
d i r e c t i o n as shown i n fig?. 4c*
ran
I x
fC
= *
Z1X d s /E l
.
J b 1
Then-
"■ •
rB * I ZX0 ds/EX
J o 8 .
;
I-A
<* \ Z0X0 d s /d J
J b
These i n t e g r a l s r e p r e s e n t th e p ro d u c t o f i n e r t i a o f th e e l& sr
t i c a r e a i n th e XZ plane*, gn
"
' ’-•
■...........................................................
.
.'wQOb^
v
IiO find, tine ^v a iu e o f W ^ 5
r a r e a l lo a d o f u n ity i s
5
I
a p p lie d a t Q in th e p o s i t i v e 35 d i r e c t i o n as shown in Fig,* 4a
and a V ir tu a l u n i t p o s i t i v e m o m e n tis a p p lie d a t 0 i n th e
)
p la n e a s sh o rn i n ,Fig*, 4d*
■ ■
.
■ . ■
.
Then ,
.
M'
d ‘X * y
.,0
1 ■
nA
#
V d s /S !
d s/G J ■ e
% d s /B l
XV
J B'’
B 1 - 1 1; J a 1 '
I
T h is i n t e g r a l ta k e s th e form o f J'ydA which i s a moment o f
I
2£
an area*
A gain l e t t i n g Gs/F I- = dA* th e i n t e g r a l s re p re s e n t."
a moment o f th e e l a s t i c a r e a in th e X:f p la n e s h e u t ' th©:
Xf
•
axis*
i,S' 'used fo r th e symbol to d en o te th e moment o f th e '
a rea , th e n
dk ■
= Qjtx
To f i n d th e Value o f
’ , a 'r e a l lo a d o f u n ity i s ■
a p p lie d , a t G i n t h e p o s i t i v e K d i r e c t i o n a s shorn' in F ig t- 4a
and a v i r t u a l u n i t - p o s i t i v e moment i s a p p lie d a t 0 i n the
p la n e as- show n-In F ig* 4e»
M-XZ'
,1 x dx'
Then
'
'
'
rd
*
'
SJ1
' d s /E l
v-p
^
/'& ds/E l
:
@
J a . 4.
da/GJ
T h is S e t Cf i n t e g r a l s , a s in th e p re v io u s p a r a g r a p h , r e p r e s e n t
a moment o f an area*
Here th e y a r e th e moment o f th e e l a s t i c
a r e a in th e T l p la n e ab o u t th e Z a x is*
moment o f th e area^ then.
I-
l e t Q*
'
rep rese n t th is
■tooto a -Izisuai in s p e c tio n o f Pig* .4£. i t can Pe seen th a t
&5C J
= 0 b ec au se th e v i r t u a l u n i t p o s i t i v e Uiomsnt a p p lie d
a t O in th e YZ .plane has no moment in the- same p la n e s as . th e
p o s i t i v e u n i t lo a d a p p lie d i n th e X d i r e c t i o n sh o w n 'in Fig* 4a*
T h is would make th e v i r t u a l work e q u a tio n eq u a l to %ero%
The re m a in in g d e f l e c t i o n s o r r o t a t i o n s due to a. u n i t lo a d
o r u n i t moment may he found in a s im ila r manner*,
low ©qua-
t l o n s S through. 8 may he w r i tte n a s ^
3a) A f
-f
4a), A f >
Ba)
AZf
•o■
- .'X I 36y .- ,Z I xa
S xy ♦
'-.X I x2 - S Iyz * Z U aX
p
A©xz - XQxx +-ZQaa + ^36aXxa
8a)
Ae^2
+X
2 4 By zI *
= 0
' W
- V
4
+ ,M X .
- B y^h' ' = 0
0 s ) . , A ^ y . + XSxx - XQy y f MxyAzy = .0
,a )
S 0
•. .:
Q
, I-
. ■
The o r i g i n b f jth e c o o rd in a te a x is G was a r b i t r a r i l y
chop sen®,
By ch o o sin g -an, o r i g i n su ch t h a t th e g te rm s w hich
r e p r e s e n t th e moment, o f an a r e a a r e S ero i3 th e above e q u a tio n s
can be s im p lif ie d ^
The moment o f an a r e a w i l l b e Serb i f th e
moment i s ta k e n ab o u t a cO ntroidal ax is*
T h e re fo re i f th e
o r i g i n 0 i s ta k e n a s th e c e n tr o id o f th e e l a s t i c a r e a @■d s / l l ,
th e Q, term s w i l l be e lim in a te d and th e s i x e q u a tio n s w ill re *
due6 to
3b ) A f
4b)
AYb
+ X (IxX
XI.Xy
x ). " YIXy + z I xa = 1O'
I(X yy^lyy)- * h iy g
0
'.
.
«k62«‘
5b) AZp- - S 3e2 * S i ^
6b)
ASi y + MxyAxy - b
7b)
A ep2j ♦ KXmZ AXZ
m • O
Z (I8X
i 6) - 0
Sb) A ep2 + MyzAyz - o
Tiieae a r e th e g e n e r a l e q u a tio n s o f th e N e u tra l P o in t Method
f o r a th r e e d im e n sio n a l s tr u c tu r e *
V-.... ■.
„63*
ABPBBDIX I I I
In FigV 5 i s sbo-w a r in g o f e l a s t i c m a te r ia l which- i s
c u t and. s e p a r a te d an amount
"■
F o r .sm all v a lu e s o f a n g le (p $
th e a r c Ftp w i l l be e%ual to th e c h o rd , th e r e f o r e b y ' S im iIaf'.
, --X
tria n g le s'.,.
'
'
A X /a y = I/&
■o r
AX.= IiQ
'
. •
and
'
, -
\
A% /kt(= X/R
■ • . ‘V
’
A.1;= XV
and
Fig# 6 shows th e projh:C$Ebh-' i n s th e
plane- o f system
" ■ F--.
'
'
GFdB w ith a n eg ativ e- tin.it r o t a t i o n a p p lie d , a t Bi, Ih e c o r r e s "
p o n d in g d e f l e c t i o n s w. i l l ‘ be. . -.
• •
■
•
/, " "
'
+A% = %9 = 4$e8*
■
'
-AY = &0 = -11«3"
:•>; v-
.
■
■
—u s.—
+Y
F ig . 5
Ring o f E l a s t i c M a te r ia l Cut and S e p a ra te d
RESTRAINTS
AT
B
+AZ = Y A e
- A Y = Z AG
F ig . 6
D isp lacem en ts o f N e u tr a l P o in t Due to N eg ativ e
U n it R o ta tio n o f B in YZ P lan e
BRATtmE CITED AIB GQMSffLyED
G r o s s , IU * a n d M organ, S,s. Bt, , 1947»
*’SOlTIHtJOTJS EHMBS OE ,
REINFORCED dONOBST%" #0&n W iley and Sens* In o t, , N?Y*
D eH art, R„ G», '^MOMENT DISTRIBUTION ANALYSIS FOR TBR3B~Dl%ENl
SIGNAL PIPE STRUOTtmES, " pp* .A240-A844. A*SM*E# .
T r a n s ,, Vol.« 6 6 , 1944
D eB a rt, R* # * , D iaG u ealon o f p a p er "MOMENT DISTRIBUTION
ANALYSIS FOR TRREB-BlMENSIONAL ElPB STRBQTBREB,"
ppd A>188? j o u r n a l o f A p p lie d M echanics,, A*S*M,B»
T ran**, 9 o l* G7* 1 9 4 6
G r i n t e r , , L* E * , 1907*
"THEORY OF MODERN STEEL,STRUaTUBESp"
Vole 2^; M a c m illa n C o ,, N*Y*
Hovgaard* W i ll i a ia ,,
"STRESSES IN TBREB-DIMBNSIQNAL PIPE
- B E N D S * 4 0 1 * 4 1 5 , A*S,W*B* TfAaa** V ol* 57* 1905
K a r e llt B , G* B , and M erchant, J& B *, "END REACTIONS AND
STRESSES IN TBREE-DIMENSiONAL PIPB LINES, " pp* A68*
A 74, A .8.M .E* T fa n a * , V&1, 6 9 , 193?
K e llo g g Go** M* W*, 1941*
"DESIGN QF PIPING SYSTEMS," N,Y*''
L ochak, .B o r la * , "SIMPLIFIED METEOD OF ANALYSIS OF REACTIONS
DEVELOPED BY EXPANSION IN A T#REa*ANCEOR PIPINGSYSTEM," pp* 311 -618* &*.S*m»% Traaa*., .VDl+ 6 6 , 1944*
McOormlok, A* S+,
ROTATION.
TANGENT#
VOl* 6 4 ,
"EXPANSION OF FORMULAS FOR CALCULATING .LOADS,
AND &EFLEOTION& OF QUARTER BENDS AND
OF i%R#8, "' pp» A38-A42* A+S+NUB* T rana*, ,
1942;
M ille r , E *,
"AN ANALYTICAL METEOD FOR DETERMINING TEE FLEXI­
BILITY OF PIPING RAVING TWO OR MORE ANCHORAGES,"
Bp? A 166-A 170, A,.S*M,E» T rane*, V ol* 6 4 , 1 9 4 # .
Porita& y* R* and S n l v a ly , B. Db* "STRESSES AND DEFLECTIONS OF
.' '' ^mEE-DIMBNSIONAL PIPE BENDS*" pp*' A lV -A Sl^ 'A*SdM.E.
T ra n s* > Vol* 6 2 , 1940*
aiT M A iW # o iT m AHD
(p on tiau aa)
jgemer* # , , %* *%DBE W m ^ E B m iO # '9# BBB WAN8I0B FORCES Ilf
p i ^ w B%- Mmm
:pp*, ^ 8 1 ^ 4 ,
2 e a n a ,j V ol* e&a 1 9 # *
',.
\
',
'
'
* *i
8p lelvo,gel*
’
= ;’
1; ‘ 1
*STRBB8 8A&#%A3IM F&R BI@B*TBMP3RA##RB
pp* @7»69, POw&p* Feb* 1941*
:
■
i";
. .
. ':
B p lelvogela 8* W* and Kameroa,, S , , %"APplICATIOR OF TBB
ELASTIO-POIKT THEORY TO RIPlKQ STRESS' OaLGBLATIOKS,
pp* IQB-ia&j,'A,B*M,Ef Trabs*?' V o lt 57y 1938 '
v .
V lgn eas, l* f
'
'
)
'
'
^BLABTIG PROPERTIES OF OBRVED TORES," pp* 105*
180%, A»',Sjs'.-M
'tiE* Trsn.S«1.,, Vol*, CS, 1943
,■
■ p lili
J 1762 10012825 3
89544
11578'
B29a
=£==£============= t = = = = = = ^
DATE
____
I
JUL
VKJ 7 f
3 S .9 * .
d O P .3 .
is s u e d
---
t o
_________