Lecture 8 ( ) π
advertisement
 π")
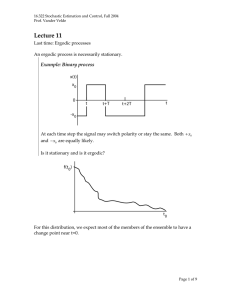
16.322 Stochastic Estimation and Control, Fall 2004 Prof. Vander Velde Lecture 8 Last time: Multi-dimensional normal distribution 1 T ⎡ 1 ⎤ f ( x) = exp ⎢ − ( x − x ) M −1 ( x − x )⎥ n ⎣ 2 ⎦ ( 2π ) 2 M If a set of random variables Xi having the multidimensional normal distribution is uncorrelated (the covariance matrix is diagonal), they are independent. The x2 argument of the exponential becomes the sum over i of i . Thus, the 2 distribution becomes a product of exponential terms in i. If XY = 0 X 2Y 3 = X 2 Y 3 = 0 The general moment of a multidimensional normal distribution, E ⎡⎣ X 1r1 X 2r2 ...X nrn ⎤⎦ , is known. • Laning and Battin. Random Processes in Automatic Control. The Exponential Distribution Many components, especially electronic components, display constant percentage failure rates over long intervals. Relative rate of failure vs time The familiar “bathtub” curve. Failure rate = E(relative rate of failure) Using the random variable T for time to failure, and assuming a constant failure rate λ (independent of time t) implies P(t < T ≤ t + dt | T > t) = λ dt Page 1 of 6 16.322 Stochastic Estimation and Control, Fall 2004 Prof. Vander Velde This relation alone defines a distribution for time to failure. P(t < T ≤ t + dt AND T > t) P(t < T ≤ t + dt | T > t) = P(T > t) f (t )dt λ dt = t 1 − ∫ f (τ )dτ 0 t f (t) = λ − λ ∫ f (τ )dτ Integral equation for f (t) 0 df (t ) = −λ f (t) dt f (t ) = ce − λ t ∞ c ∫ f (t )dt = − λ e Differential equation for f (t) − λt ∞ 0 0 = c λ = 1 c = λ f (t ) = λ e − λ t To find the moments of the distribution, start with the characteristic function. ∞ φ ( s ) = ∫ e jst λ e − λt dt = 0 λ js − λ e( js−λ )t ∞ 0 = λ λ − js dφ ( s ) λj = (λ − js) 2 ds 2λ j 2 d 2φ ( s ) = (λ − js)3 ds 2 T = T2 = σ T2 = 1 dφ ( s) 1 = = tm ≡ mean time to failure (MTTF) j ds s=0 λ 1 d 2φ (s) 2 = 2 2 2 j ds s=0 λ 2 λ 2 − 1 λ 2 = 1 λ2 = tm2 Thus in this case, σ T = T . The standard deviation is equal to the mean. ⎛ t ⎞ 1 −⎜ t ⎟ f (t ) = e ⎝ m ⎠ tm Page 2 of 6 16.322 Stochastic Estimation and Control, Fall 2004 Prof. Vander Velde Reliability over lifetime tl: τ ∞ 1 − R(tl ) = P(T > tl ) = ∫ e tm dτ t t m = −e ⎛τ ⎞ −⎜ ⎟ ⎝ tm ⎠ ∞ =e ⎛t ⎞ −⎜ l ⎟ ⎝ tm ⎠ τ =tl Suppose a system contains n components all of which must operate if the system is to operate (no redundancy), and component failures are considered independent. This is called a simplex system. For the system: Rs (t ) = P(Ts > t) = P(T1 > t , T2 > t,..., Tn > t) = P(T1 > t ) P (T2 > t)...P (Tn > t) =e =e ⎛ t −⎜ ⎜ tm ⎝ 1 ⎞ ⎛ t ⎟ −⎜ ⎟ ⎜ tm ⎠ ⎝ 2 ⎛ t − ⎜ ⎜ tm ⎝ s ⎞ ⎟ ⎟ ⎠ e ⎞ ⎟ ⎟ ⎠ ...e ⎛ t −⎜ ⎜ tm ⎝ n ⎞ ⎟ ⎟ ⎠ This is the same form for the system as for the individual components. Thus the system also has an exponential distribution of time to failure, with the indicated mean time to failure. n 1 1 =∑ tms i =1 tmi n λs = ∑ λi i =1 If all the components have the same mean time to failure, tmi = tmc , i = 1, 2,..., n 1 n = tms tmc tms = 1 tm n c Note the importance of part count n to system reliability. Example: Lifetime system reliability Suppose we wish to achieve a 99% probability of successful system operation over a mission lifetime tl. Page 3 of 6 16.322 Stochastic Estimation and Control, Fall 2004 Prof. Vander Velde Rs (tl ) = 0.99 e ⎛ t −⎜ l ⎜ tm ⎝ s 1− ⎞ ⎟ ⎟ ⎠ = 0.99 tl = 0.99 tms tl = 0.01 tms tms = 100tl To achieve 99% reliability, the MTTF of a component must be at 100 times the mission lifetime. Now suppose the system contains 1000 components of equal tmc . 1 1000 1 1000 =∑ = tms i =1 tmi tmi 1 tm = 100tl 1000 c tmc = 105 tl tms = For a planetary mission where tl = 2 years, the component MTTF must be 200,000 years. This is why we do not conduct high reliability, high component count missions without redundancy. Linearized Error Propagation Example: Orbiting spacecraft Orbiting spacecraft carrying lander ⎡r ⎤ Given an initial state: x̂0 = ⎢ 0 ⎥ ⎣ v0 ⎦ 6×1 Page 4 of 6 16.322 Stochastic Estimation and Control, Fall 2004 Prof. Vander Velde Errors are zero mean: e0 = x0actual − x0est . Covariance matrix: [ E0 ]6×6 = e0 e0T Lander deployment is impulsive (assume short burn, negligible change in position): er1 = er0 ev1 = v1true − v1nom = v0true + ∆v + δ v − ( v0est . + ∆v ) = ev0 + δ v ⎡ er0 ⎤ e1 = ⎢ ⎥ ⎢⎣ ev0 + δ v ⎦⎥ ⎡ 0⎤ = e0 + J δ v , where J = ⎢ ⎥ ⎣ I ⎦ 6×3 E1 = e1 e1T = [ e0 + J δ v ] ⎡⎣ e0T + δ v T J T ⎤⎦ = E0 + JDJ T , if e0δ v T = δ v T e0T = 0 ⎡0 0 ⎤ = E0 + ⎢ ⎥ ⎣ 0 D ⎦ 6×6 D = δ vδ v T : covariance matrix for velocity correction errors. Now these errors must be propagated to the surface. A linearized description of error propagation is given by a transition matrix which relates perturbations in position and velocity components at the initial point to perturbations in position and velocity at any later point. For the present purpose, we may be interested only in the position perturbation at the end point. Direct sensitivity analysis 6 δ rs = ∑ i j=1 ∂rsi ∂xij δ xij , i = 1, 2 Page 5 of 6 16.322 Stochastic Estimation and Control, Fall 2004 Prof. Vander Velde Often this sensitivity matrix can only be evaluated by simulation. If a small δ xij is introduced and the δ rsi noted (i =1,2), the ratios measures of the ∂rsi ∂xij δ rs are finite-difference δ xij i , which are the values comprising the jth column of S. Thus 6 perturbed trajectories must be calculated and the end state differenced with the nominal end state to define S. Each perturbed trajectory defines one column of S. es = [ S ]2×6 e1 Sij = ∂rsi ∂xij ≈ ∆rsi ∆xij Linearized analysis Given the dynamics x& = f ( x ) r& = v v& = a + g Consider the errors as a small perturbation around the nominal x (t ) trajectory. x& = x&n + δ x& = f ( xn + δ x ) ≈ f ( xn ) + df dx δx x&n = f ( xn ) δ x& = Fδ x, where Fij = ∂f i ∂x j ∂x (t ) = Φ (t0 , t )δ x (t0 ) dΦ (t0 , t ) δ x (t0 ) = F (t )δ x (t ) dt = F (t )Φ (t0 , t )δ x (t0 ) δ x& (t ) = Therefore, for arbitrary δ x (t0 ) dΦ(t0 , t ) = F ( t )Φ (t0 , t ) dt Φ(t0 , t0 ) = I Page 6 of 6