Humans in safety critical systems Erik Hollnagel, 2000
advertisement

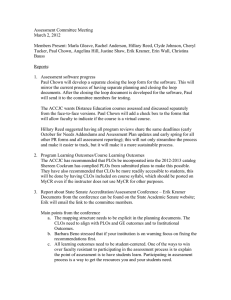
Humans in safety critical systems Erik Hollnagel, 2000 Estimated number of “human errors” 100 % Human action attributed as cause 90 The diagram shows the attribution of “human errors” as causes, which may be different from the contribution of “human errors” to incidents / accidents. 80 70 60 50 40 30 20 10 1960 1965 Erik Hollnagel, 2000 1970 1975 1980 1985 1990 1995 What is an “error”? Incorre ct actions Correctly performed actions Detected and recovered Detected but tolerated Detected but not recovered Undetected Erik Hollnagel, 2000 Actual outcomes = intended outcomes Overt effects Latent effects Humans and system safety Technology centredview Humans are a major source of failure. It is therefore desirable to design the human out of the system. Automation permits the system to function when the limits of human capability have been reached. Human-centred view Humans are the main resource during unexpected events. It is therefore necessary to keep them in the system. The conditions for transition between automation and human control are often vague and context dependent. Automation does not use humans effectively, but leaves them with tasks that cannot be automated - because they are too complex or too trivial. Automation is costeffective because it reduces the skillrequirements to the operators. Conclusion: Humans are necessary to ensure safety Erik Hollnagel, 2000 Ironies of automation The basic automation “philosophy” is that the human operator is unreliable and inefficient, and therefore should be eliminated from the system. 1 “Designer errors can be a major source of operating problems.” 2 “The designer, who tries to eliminate the operator, still leaves the operator to do the tasks which the designer cannot think how to automate.” Lisanne Bainbridge (1987), “Ironies of automation” Erik Hollnagel, 2000 Automation double-bind Safety critical event Design teams are fallible, therefore humans are required in the system Erik Hollnagel, 2000 Humans are fallible, and should therefore be designed “out” of the system Maintaining control What can help maintain or regain control? What causes the loss of control? Unexpected events Acute time pressure Not knowing what happens Not knowing what to do Not having the necessary resources Erik Hollnagel, 2000 Being in control of the situation means: Knowing what will happen Knowing what has happened Sufficient time Good predictions of future events Reduced task load Clear alternatives or procedures Capacity to evaluate and plan Cyclical HMI model Goals for what to do when something unusual happens: Goals [Identify, Diagnose, Evaluate, Action] Tea m Erik Hollnagel, 2000 Informati on / feedback Provides / produce s Modifi es Next action Current understandin g Directs / controls Effects of misunderstanding The dynamics of the process only leaves limited time for interpretation Increases demands to interpretatio n Operator may lose control of situation Erik Hollnagel, 2000 Unexpecte d informatio n / feedback Provides / produce s Inadequat e actions Loss of accuracy increases unexpected information Incorrect or incomplete understanding Leads to Prevention and protection Initiating event (incorrect action) Prevention (control barriers): Protection (safety barriers): Protection (boundaries): Active or passive barrier functions that prevent the initiating event from occurring. Active barrier functions that deflect consequences Passive barrier functions that minimise consequences Erik Hollnagel, 2000 Types of barrier systems Material barriers Physically prevents an action from being carried out, or prevents the consequences from spreading Functional (active or dynamic) barriers Hinders the action via preconditions (logical, physical, temporal) and interlocks (passwords, synchronisation, locks) Symbolic barriers (perceptual, conceptual barriers) requires an act of interpretation to work, i.e. an intelligent and perceiving agent (signs, signals alarms, warnings) Immaterial barriers (non-material barriers) not physically present in the situation, rely on internalised knowledge (rules, restrictions, laws) Erik Hollnagel, 2000 Barrier system types Physical, material Obstructions, hindrances, ... Functional Mechanical (interlocks) Logical, spatial, temporal Symbolic Signs & signals Procedures Interface design Immaterial Rules, laws Erik Hollnagel, 2000 Barriers systems on the road Symbolic: requires interpretatio n Physical: works even when not seen Symbolic: requires interpretation Erik Hollnagel, 2000 Symbolic: requires interpretation Classification of barriers Material, physical Containing Restraining Keeping together Dissipating Walls,fences, tanks, valves Safety belts, cages Safety glass Air bags, sprinklers Function al Preventing (hard) Preventing (soft) Hindering Symbolic Countering Regulating Indicating Permitting Communicating Locks, brakes, interlocks Passwords, codes, logic Distance, delays, synchronisation Function coding, labels, warnings Instructions, procedures Signs, signals, alarms Work permits, passes Clearance, approval Immateri al Monitoring Prescribing Monitoring Rules, restrictions, laws Erik Hollnagel, 2000 Barrier evaluation criteria Efficiency: how efficient the barrier is expected to be in achieving its purpose. Robustness: how resistant the barrier is w.r.t. variability of the environment (working practices, degraded information, unexpected events, etc.). Delay: Time from conception to implementation. Resources required. Costs in building and maintaining the barrier. Safety relevance: Applicability to safety critical tasks. Evaluation: How easy it is to verify that the barrier works. Erik Hollnagel, 2000