Barge Design Optimization Anonymous MIT Students
advertisement

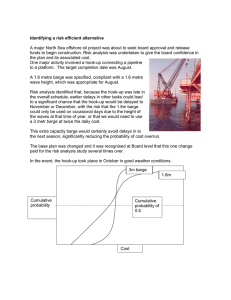
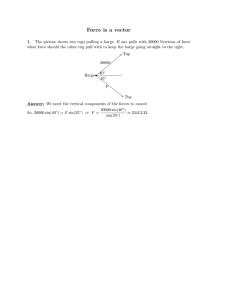
ESD.77 FINAL PROJECT SPRING 2010 Barge Design Optimization Anonymous MIT Students Abstract— In this project, three members of the Armed Forces tested the multi-disciplinary system design optimization approach to concept evaluation on a simplified platform, a barge. A barge is a non-self propelled vessel that incorporates the basic disciplines of ship building: hydrodynamics, hydrostatics, and structural mechanics. Using four bounded design variables, we attempt to optimize the payload, in tons, that a barge could carry within the physical constraints. We conduct a design of experiments to select an initial design to further optimize. Sequential quadratic programming (SQP) was used to solve the nonlinear program (NLP) in computer software MATLAB. The NLP was also solved using the genertic algorithm (GA) heurisitic. SQP converged quickly and found the optimal solution. The problem was expanded to include another objective, structural weight. The multi-objective problem was solved to create a Pareto front to show the trade-offs for each objective. The results of the study show this approach is feasible for these types of platforms and allow the opportubnity for expansion of included disciplines as well as increased fidelity of the model used. Thus, eventually, a warship or some other such complex system could be designed with this approach. Index Terms—Barge, MDO, SQP, Genetic Algorithm —————————— —————————— 1 INTRODUCTION barge is a typically non-self propelled , flatbottom ed vessel u sed initially for river or canal transportation of heavy good s. Althou gh other m eans of transportation have been d eveloped since their introd u ction, barges are still u sed all over the w orld as a low -cost solu tion for carrying either low -valu e or heavy and bu lky item s. Althou gh a barge is very sim plistic com p ared to m ost of its w aterborne brethren, it still presents am ple op po rtu nity to experim ent w ith balanced d esigns. A cu stom er m ay d esire to carry as m u ch payload as p ossible to gain effeciencies in their transportation costs, bu t m axim izing these payload s m u st be balanced by engineers to operate w ithin the law s of physics (inclu d ing stability, bu oyancy, pow ering, resistance, stru ctu res, etc.) and balanced b y financiers to operate w ithin a cu stom er ’s allow able lim its of cost. These tw o very obviou s consid erations alone can create qu ite a com plex balancing act, since these forces requ irem ents, feasibility, cost - tend to oppose each other. Technology, they have taken a range of cou rses inclu d ing Marine H yd rod ynam ics, Design Principles for Ocean Vehicles, Principles of N aval Architectu re, Pow er and Propu lsion, Stru ctu ral Mechanics, Plates and Shells, Ship Stru ctu ral Analysis and Design, and Ship Design and Constru ction. Each of these cou rses had one of tw o ap proaches. Either the cou rse exam ined a particu lar d iscip line of ship d esign and m entioned that a d esigner shou ld not forget other d isciplines, or the cou rse exam ined the d esign as a process and recognized the m any d isciplines bu t encou raged an iterative, ―throw -it-over-the-w all‖ ap proach to converge to a point d esign. To fu rther em phasize, even the cou rses that recognized the m u ltid isciplinary aspects of ship d esign only d esigned for co nvergence to any feasible d esign w ithin the space, not necessarily an optim al d esign. Thu s, the team w ished to explore the p ossibility of an optim al d esign am ongst each of the d isciplines. We w anted to create an optim al d esign from a m u ltid isciplinary stand point and u nd erstand the associated trad e-offs w ithin the d esign vector. Meanw hile, we 2 MOTIVATION w anted to acqu ire know led ge and skills by u sing the m eThe team ’s interest and backgrou nd in m any asso- thod s and tools of this new trad e. ciated d isciplines has prim arily m otivated this project. The team knew, how ever, that u sing these tools to d eDu ring the team ’s tenu re at Massachu setts Institu te of sign any stand ard sea-going vessel w ou ld provid e d im inishing retu rns d u e to the incred ibly com plex and ———————————————— cou pled natu re of the en tire set of d esign variables. Thu s, the team u sed a sim plified , low -fid elity m od el on a sim Student A is pursuing a Naval Engineer’s Degree and an M S in Engineering M anagement through the Systems Design and Management pro- ple vessel – a barge – to d em onstrate the benefit of these gram, both at the M assachussetts Institute of Technology in Cambridge, tools w ithin the m arine d esign environm ent. The u nd erM A 02139. stand ing w as that the d esign vector cou ld grow and th e Student B i s pursuing a N aval Engineer’s Degree and an M S in fid elity of the m od el cou ld increase m od u larly to accom Engineering M anagement through the Systems Design and Management program, both at the M assachussetts Institute of Technology in Cambridge, m od ate increasingly com plex d esigns for m ore typical ocean platform s. Ind eed , tw o team m em bers have the M A 02139. task of perform ing a clean slate d esign of a w arship for Student C is pursuing an M S in Operational Research at M assachusetts Institute of Technology in Cambridge, M A 02139. the next year, so, shou ld they incorporate these tools in the d esign process, the d esign vector w ill grow and the A ESD.77 © 2010 IEEE 2 ESD.77 FINAL PROJECT SPRING 2010 fid elity and com pu tational expense of the m od el w ill increase very qu ickly. This project proved a good proof of concept for the team m em bers to grow and ad d variables, param eters, constraints, and fid elity to at a later d ate. 3 PROBLEM FORMULATION As w ith any vessel operating in the m arine enviro nm ent, the d esigner has to d eal w ith stability, seakee ping and stru ctu ral strength issu es – to nam e a few - all of w hich com e from d ifferent d isciplines: hyd rostatics, hyd rod ynam ics, and stru ctu ral m echanics. The team u sed the m ethod s and tools of m u lti-d isciplinary system d esign optim ization to optim ize the d esign of a barge w ith respect these d isciplines. The prim ary d esign objective w as to m axim ize the p ayload (i.e. the cargo cap acity) that the barge can effectively carry. Eventu ally, this project also balanced that optim ization against the cost of the vessel, represented by the barge’s w eight. To start, the team u tilized a MATLAB® cod e im plem ented to m od el a barge’s seakeeping behavior (the hyd rod ynam ics of the vessel) d u ring a Design Princip les of Ocean Vehicles term project. The cod e w as lim ited to non self-propelled vehicles, and only ev alu ated heave and pitch m otions. The origin al cod e also only stu d ied one particu lar hu ll shape w ith a particu lar beam to d raft ratio. Ou t of a d esire to elim inate d iscrete variables, the hyd r od ynam ic properties represented in the cod e for each beam to d raft ratio w ere first fitted to cu rves in ord e r to allow for a continu ou s d esign space exploration instead of lim iting the beam to be either 2-, 4-, or 8- tim es the d raft of the barge. Ad d itionally, the team m od eled the hyd rostatics and stru ctu ral strength of the barge. The hyd rostatics requ irem ents and im plem entation w ere d erived from Principles of N aval Architectu re, and provid ed the basic r equ irem ents that the barge float (bu oyancy equ als w eight) and that it floats u pright (positive m etacentric height). The stru ctu ral m echanics m od u le w as d erived from the Am erican Bu ereau of Shipping (ABS) ru les for steel vessels assu m ing m ild steel as the type of m aterial. Originally, the team d esignated 8 d esign variables to be changed d u ring the exporation of the d esign sp ace. These variables w ere length, beam , d raft, d epth, vertical center of gravity (VCG), speed , cross-sectional area coefficient, and d isplacem ent. H ow ever, cross-sectional area coefficient w as a resu lt of beam and d raft, so it w as elim inated and only u sed as an interm ed iate variable. Also, d isplacem ent and VCG w ere a resu lt of length, beam , d raft, and the p ayload – ou r objective – so they w ere elim inated as d esign variables, also, and only u sed as an interm ed iate variables. Becau se d raft w as also a resu lt of payload , it w as elim inated as a d esign variable. Finally, speed w as rem oved as a d esign variable becau se it only affected the hyd rod ynam ics, not the hyd rostatics or stru ctu ral m echanics, so the team thou ght it u ninteresting to explore at this tim e, besid es the fact that typically a speed is d e signated as a requ irem ent by a cu stom er. Thu s, the rem aining d esign variables for this project w ere: The length (L) The beam (B) The d ep th (D) The thickness of the steel p lates (t) The bou nd s for ou r d esign variables are typical of barges. 3-1: D esign Variables and Bounds Ad d itionally, im plem entation of the cod e requ ired several other inpu ts that the team consid ered fixed for the pu rposes of this exploration. These p aram eters w ere r equ ired by one or m ore m od u les to ad equ ately m od el the ap prop riate responses of the m od u les to the d esign vector. These d esign p aram eters w ere: v kg lcg Design Parameters Speed Payload vertical center of gravity Payload longitudinal center of gravity Value 10 1.2D 0.5L Unit knots ω Peak spectral f requency 0.7 rad/sec H Signif icant wave height 2.5 m ρ Sea water density 1025 kg/m3 ρstr Material thickness 7850 kg/m3 3-2: D esign Parameters and Values The significant w ave height of the assu m ed ocean cond itions (H ) Peak sp ectral frequ ency of the assu m ed ocean cond itions (ω) Mild steel m aterial d ensity (ρ) You ng’s Mod u lu s of m ild steel (E) The longitu d inal p osition of the center of gravity (LCG) Sea-w ater d ensity (ρsw ) Fresh w ater d ensity (ρfw ) Like any typical engineering problem , the team recognized there w ou ld be constraints that lim ited ou r potential solu tion set. Steel beam s and plates cannot extend to infinite w ithou t bu ckling u nd er their ow n w eight at som e point, let alone su stain ad d ed pressu re from a payload w ithou t bu ckling. Other p hysical constrainsts w ere a ccou nted for. There w ere also assu m ed cu stom er constraints, for instance the frequ ency that the cu stom er w ou ld allow the cargo to get w et given the assu m ed sea state. The team d id their best to accou nt for several physical and cu stom er constraints on this problem , finally end ing w ith: Inequ ality constraints: ESD.77 FINAL PROJECT SPRING 2010 3 N<60 T<6m GM>0.15m B<30m Inequality Constraints Number of occurences of green water on deck per hour Draf t Metacentric height Beam <30m to f it through Panama Canal σk,sag <250MPa Keel stress at sagging wave σk,hog <250MPa Keel stress at hogging wave σd,sag <250MPa Deck stress at sagging wave σd,hog <250MPa Deck stress at hogging wave 3-3: Inequality Constraints The m axim u m allow able stresses for the d eck and the keel in sagging, hogging and calm w ater cond itions m u st be less than or equ al to the critical stress of m ild steel Initial m etacentric height greater than 0.15m for initial stability (Lim it set by Am erican Bu reau of Ship bu ild ing (ABS) ru les) Occu rrences of green w ater on d eck less than or equ al to one every m inu te The d raft m u st be less than 6m , a reason able d ep th for a d red ged channel or river The w id th m u st be less than 35m in ord er to fit in certain locks along seaw ays Equ ality constraints w ere: Bu oyancy m u st equ al the w eight (floating cond ition) Becau se the m od el w as greatly sim plified , the Design Stru ctu re Matrix (DSM) representation of each of the p aram eters and variables w ithin each of the m od u les w as also rather sim ple to see. We w ere able to rem ove iterations and loop s u sing only one iteration throu gh the DSM, as noted from Figu re 1 to Figu re 2 below. Design Vector Const Vector Hydrodynamics 1-6,8 20,21,25,26,27 Hydrostatics 1-5,8 23,25-27 7 Structural Mechanics 1-5 22-24 The analysis rou tines inclu d e the evalu ation of the three d isciplines m od u les. The hyd rostatic m od u le com prises calcu lations for d eterm ining the position of the barge’s center of gravity in its load ing cond ition . This is then u sed to d eterm ine the vertical m etacentric height (GM), w hich is the m ost representative stability ind ex. This im plem entation evalu ates GM that has to be greater than 0.15m accord ing to the ABS ru les. The stru ctu ral analysis m od u le evalu ates ABS-d erived param etric equ ations to d eterm ine the m axim u m stresses in hogging and saggin g w ave cond itions. This assu m es a u niform longitu d inal w eight d istribu tion, w hich is not expected to be alw ays tru e in real-case scenarios bu t is a reasonable assu m ption w ithin the scope of this project . Maxim u m bend ing m om ent stresses are experienced in the d eck and keel ed ges and these p articu lar valu es are evalu ated against the stress lim it for m ild steel, w hich is ou r m aterial choice. The hyd rod ynam ic m od u le evalu ates the seakeeping behavior of the barge. Seakeeping analysis is lim ited in the cou pled heave and pitch responses and the ou tpu t is the nu m ber of occu rrences of green w ater on d eck per hou r. For this project w e have set the constraint to be less than sixty. Pitch and heave m otions are calcu lated based on 2D strip theory and are ev alu ated against head seas. The local hyd rod ynam ics properties are based on exper im ental m easu rem ents from Lew is form theory. The necessary cu rve fitting is im plem ented to allow for a cont inu ou s d esign space exploration . Seakeeping is evalu ated for the Bretschneid er spectru m w ith a significant w ave height of 3m and peak spectral frequ ency of 0.7rad / sec. This choice of spectru m m ay not be id eal for a barge project d esign since it is m ost applied for fu lly d eveloped seas bu t still is ad equ ate for the pu rpose of this project . The basic inpu t/ ou tpu t d iagram is d epicted below in Figu re 3. There are several interm ed iate variables and param eters, as m entioned , bu t this sim ple d iagram ca ptu res the d esign variables, the ou tpu ts of the m od u les, and the su bsequ ent calcu lation of ou r objectives u sing those ou tpu ts. 7 Figure 1: Initial D SM Design Vector Const Vector Hydrostatics 1-5,8 23,25-27 Hydrodynamics 1-6,8 20,21,25,26,27 7 Structural Mechanics 1-5 22-24 7 Figure 3: Input/Output D iagram w ith Modules Figure 2: Final D SM The program starts from zero payload and perform s iterations u ntil the m axim um payload is achieved for a specific d esign vector w ithou t violating any constraint in a Mu lti-d isciplinary Feasible (MDF) aproach. At the sam e tim e the stru ctu ral w eight necessary to im plem ent this d esign is calcu lated , this valu e can be u sed as a su rrogate 4 ESD.77 FINAL PROJECT SPRING 2010 resu lt for the cost of the vessel. 4 VALIDATION The cod e w as u sed in analysis m od e to valid ate its r esu lts against a know n barge, the MARMAC 400, fou nd w ith Macd onou gh Marine Service. This benchm arking gave good confid ence in the m od el and the resu lts. Our d esign vector w as: 122m length 30m beam 6.1m d epth 16m m thickness The analysis cod e gave the resu lts of: 4.35m load line d raft 14,670MT payload These resu lts com p are very w ell w ith the MARMAC 400. The characteristics of this existing barge are: 121.92m length 30.4m beam 6.1m d epth 4.34m load line d raft 11,453.9MT payload Initially, there w as concern that the team ’s resu lt for payload w as significantly higher (28% higher) than this existing barge. H ow ever, upon fu rther inspection of the characteristics of the MARMAC 400, there are d ifferences that can explain a good portion of this d ifference. For instance, the m od eled barge w as an exact squ are box w ith an inner bottom for ad d ed stru ctu ral strength. The MARMAC 400 is not a perfect box; it has shaped bow and ed ges. This d ecreases the volu m e of the MARMAC 400 com pared to the m od el. Ad d itionally, the MARMAC 400 d oes not have an inner bottom for ad d ed strength. The team postu lates that the MARMAC 400 cou ld be lim ited in the capacity it can carry d u e to its stru ctu ral m em bers; the shell m ight bu ckle earlier and thu s have hogging or sagging stresses in the d eck or keel as a lim iting factor, w hereas the active constraint of the m od el w as the nu m ber of occu rances of w ater on d eck. Ad d itionally, the MARMAC 400 likely has m ore stru ctu ral m em bers in the form of plate stiffeners and gird ers that likely increase the stru ctu ral w eight of that vessel com p ared to ou rs, w hich w ill also increase the hogging and saggin m om ents of that vessel com p ared to ou rs, w hich in tru n d ecrease the payload . Lastly, the payload characteristic of the MARMAC 400 is based on operations, w here the segm entation of the stores on the MARMAC 400 lim its its capacity. O perators cou ld overcom e this lim itation by stacking cargo higher, bu t then w ou ld ru n into the m etacentric height constraint for stability. Contrastingly, the m od el has no segm ent ation, and assu m es a u niform ly d istribu ted load both lo ngitu d inally and athw artship throu ghou t the vessel (u niform ly d istribu ted d irt, or su gar cane, or concrete, for instance). This aspect allow s the m od el to fit m ore pay load in the vessel w ith a low er m etacentric height of the vessel-payload system . Thu s, w ith these consid erations in m ind , the t eam con- sid ered the m od el ad equ ate enou gh for evalu ation pu rposes. Ad d itionally, the team recognized that these d ifferences and real w orld constraints w ou ld scale w ith the barge, so that any optim al solu tion w ou ld rem ain the o ptim al solu tion w ith the above consid erations, even thou gh the payload m ay not be exact. 5 INITIAL DESIGN SPACE EXPLORATION An initial exploration of the d esign space w as carried ou t u sing a fractional factorial d esign . We d iscretized the rem aining fou r continu ou s d esign variables to three levels – high, m ed iu m , and low. For sim plicity, the team chose the high valu es to be the u pper bou nd s of each of the d esign variables, the low valu es to be the low er bou nd s of the variables, and the m ed iu m valu es to be the m id point 4 of the bou nd s. A fu ll factorial d esign w ou ld m ean 3 =81 experim ents. At the tim e, the team w as only interested in the m ain effects and tw o-w ay interactions, so a fractional factorial d esign w as selected instead . Thu s, the team com p leted 48 ru ns. Sixteen of these ru ns retu rned infeasible resu lts, and w ere elim inated , leaving 32 ru ns to analyze. The resu lts of these 32 ru ns w ere u sed in JMP® statistical softw are to d eterm ine the m ain effects. The resu lts, in Figu re 4 below, conclu d e that the beam had the m ost significant effect on the payload , and length and d epth had abou t half as m u ch affect. The valu es for length and beam had very high confid ence levels, w hile the d raft w as qu ite w id ely d istribu ted . This gave the team good confid ence in the m od el, bu t, m ore im portantly, gave a good starting point for the nu m erical optim izations. Figure 4: D esign Variable Estimates from JMP® Specifically, the starting p oint u sed d u ring optim iz ation, based on the resu lts of the DOE, w as: 140m length 30m beam 9m depth 20mm plate thickness 6 OPTIMIZATION ALGORITHMS 6.1 Gradient-based Optimization: SQP We selected Sequ ential Qu ad ratic Program m ing (SQP) for ou r grad ient-based optim izer. MATLAB u ses this algorithm in the fu nction ―fm incon.‖ The barge m od el u ses a m u lti d isciplinary feasible (MDF) approach that bu ild s the equ ality and inequ ality constraints into the su bsystem m od u les. Su bsequ ently, no constraints are hand led by the optim ization algorithm at the system level. The bou nd s on the d esign variables m ake the optim i- ESD.77 FINAL PROJECT SPRING 2010 5 zation process challenging u sing an u nconstrained algorithm . MATLAB’s ―fm insearch‖ and ―fm inu nc‖ fu nctions w ere available to u se Steepest Descent, Qu asi-N ew ton, or N ew ton’s m ethod bu t w ou ld requ ire a form u lation to penalize the objective fu nction w hen the d esign variables fell ou tsid e of the feasible region (ou tsid e of the d esign variable bou nd s). Introd u cing penalties for bou nd s violation w ou ld introd u ce com plexity in the optim ization a lgorithm . Consequ ently, the team selected ―fm incon‖ as the m ost effective and elegant w ay to inpu t bou nd s for the d esign variables and optim ize the m od el. 6.2 Single Objective Optimization: Payload Payload w as selected as the single objective fu n ction to be optim ized . Betw een payload and stru ctu ral w eight, w e believe that the process of optim izing the p ayload w ill provid e better insights for the d esign process. Moreover, payload seem s to be m ore d irectly cou pled w ith all constraints. Convergence of the algorithm w as achieved only a fter the convergence tolerance on the m od el w as significantly red u ced . H igh convergence tolerance initially cau sed the optim ization algorithm to finite d ifference noise and fail. When w e specified a sm aller convergence tolerance, the optim ization algorithm yield ed the local optim u m in the ord er of 20-25 iterations w ith a rand om starting point . ad d itional payload . The algorithm yield ed a m od erate im provem ent. Taking into accou nt that ou r starting point w as the best estim ation from the DOE, the sm all am ou nt of im provem ent seem s reasonable. 6.3 Sensitivity Analysis The grad ient of the objective fu nction at the optim al solu tion w as: 1.62 *10 6 J 717 16 140 Figu re 5 show s the norm alized sensitivities for each d esign variable after norm alization arou nd the optim al solu tion. 140 Starting from x0 35 9 w here the DOE fou nd the best 20 solu tion. After 16 iterations the algorithm yield ed : 140 x* 35 8.2 15.78 as the op tim al solu tion, resu lting in a p ayload of 24,358 tons. Com p ared to the initial starting p oint p ayload of 23,757 tons, the op tim al had an increase in 601 tons. The optim al barge m aintains the m axim u m length and beam , bu t is 0.7 m eters less d eep, and 4.22 m m less plate thickness. The DOE show ed , and w e expected , the largest boat in length and beam to provid e the largest p ayload possible. The solver confirm ed that and d id not m ove from the u pper bou nd on length and beam . The d ecrease in the last tw o variables, d epth and p late thickness, prod u ced a m ore efficient ship , m ainly becau se of stru ctu ral consid erations. Red u cing plate thickness ap plies to the entire barge so even a sm all red u ction brings d ow n overall barge w eight. Any lessening in hu ll thickness need s to m aintain the stru ctu ral constraints, su ch as m axim u m allow able stresses at a hogging w ave, bu t w ill also red u ce the w eight that goes into the hyd rostatic constraints. The solver fou nd the thinner hall, w ith a red u ced d epth, w as still feasible and red u ced the barge w eight allow ing for Figure 5: N ormalized Sensitivites for D esign Variables The length (L) has the significant effect. This agrees w ith intu ition; the size of the barge has a significant effect on the payload capacity of the barge. This find ing strengthens ou r notion that SQP fou nd the optim al solu tion . Any increase in length has a large im pact on im proving the objective; the SQP solu tion w as the u pper bou nd of length. As long as constraints are not v iolated , the m ost length w ill be u sed . We expected to experience sim ilar resu lts w ith beam , bu t fou nd that it had little im pact. The plate thickness (t) slightly d ecreases the payload as it increases. This also follow s intu ition . Any ad d itional thickness of the hu ll w ill increase the barge w eight, and w ill not allow the sam e am ou nt of payload to m eet stru ctu ral constraints. Tw o of the constraints w ere active at the optim al solu tion, the nu m ber of occu rrences of green w ater on d eck per hou r (N ) and d eck stress at hogging w ave (σd ,hog). We m anu ally extracted the param eter sensitivity. The ou tpu t argu m ents of the optim ization algorithm cou ld not provid e this becau se w e u sed an MDF im plem entation -- all constraints w ere hand led w ithin the m od el. This is a d isad vantage of MDF im plem entation of the m od el. The m anu ally extracted param eter sensitivity show ed u s the im pact of speed , v, as seen in the Figu re 6. The constraint of green w ater on d eck is highly d epend ent on speed . The increase of speed w ill cau se m ore green w ater 6 ESD.77 FINAL PROJECT SPRING 2010 on d eck and violate the constraint. The violation of the constraint becau se of faster sp ped cou ld be rem ed ied by d ecreasing the payload or the size of the barge (w hich w ou ld also d ecrease the payload ). length and beam w ere red u ced . This p late thickness w as actu ally greater than the 20 m m w e u sed from the DOE. This GA im plem entation u sed crossover rate of 1, m u tation rate of 0.03 and 16 bit encod ing for all d esign v ariables. This encod ing correspond s to a precision higher -2 than 10 for all d esign variables based on x xUB x LB and d rives the p op u lation size. 2 bits A second attem pt w as m ad e by at 0.02 m u tation rate. The resu lts w ere com parable to the first GA im plem ent ation bu t d id not reach the grad ient-based SQP im plem entation.N am ely, the best fitness occu rred at 139.77 x * ga 34.97 8.99 w ith P = 23,060 tons. 24.29 Figure 6: N ormalized Sensitivites of D esign Parameters The param eters payload vertical center of gravity (kg) and significant w ave height (H ) also had negative im p act on the overall payload . An increase in either param eter w ou ld also im p act the nu m ber of green w aves on d eck , bu t not as significantly as sp eed . 6.4 Heuristic Optimization We u sed a Genetic Algorithm on m axim ize barge payload . The team expected the GA to be easiest heu ristic to u nd erstand and im plem ent. Moreover, the fitness fu n ction im plem entation w as straightforw ard for ou r m a xim ization problem and w ithou t necessity to inclu d e any constraints. Finally, the bou nd s of the d esign variables can be set w ithin the algorithm . Althou gh the GA w as expected to be com pu tationally expensive, w e d ecid ed to leverage the probabilistic transition ru les it u ses for a m ore robu st d esign sp ace explor ation. Ou r first attem pt to im plem ent the GA yield ed resu lts com parable to the grad ient-based SQP w e u sed in the previou sly. Specifically, the best fitness occu rred at: Both GA ru ns exceed ed 10 hou rs to evalu ate 100 generations. The noticeable d ifference betw een GA and SQP w as the plate thickness (t). Both GA im plem entations pointed higher thicknesses bu t the low er thickness fou nd from the SQP yield s higher payload and follow s intu ition as explained previou sly. Ad d itional GA tu ning w as seen u nnecessary. 6.5 Global Optimum Ru nning the optim ization w ith d ifferent starting p oints resu lted in d ifferent optim u m solu tions. This reveals that ou r d esign sp ace is non -linear. Althou gh, after leveraging the DOE resu lts, w e expected SQP to have fou nd the global optim u m , w e w ere cau tiou s since SQP is inherently incap able of d ealing w ith local optim a and w e ha d ind ications that there m ay be m any in this d esign problem . GA im plem entation pointed tow ard s this d irection even thou gh it d id not su cceed in reaching the optim u m w ith good accu racy. The global optim u m is thu s estim ated at: 140 x * SQP 138.7 x * 34.6 ga 8 .9 35 8. 7 14.2 w here P = 24,358 tons. 25.1 resu lting to P = 22,468 tons com p ared to 24,358 tons at 140 x * SQP 35 7 POST-OPTIMALITY ANALYSIS The calcu lated H essian m atrix u sing second ord er fi-4 nite d ifferencing for a stesize of 10 at the optim al solu tion w as 12 8.7 14.2 from the grad ient-based SQP. The GA appeared to stop near a local optim al that w as m u ch thicker than the SQP solu tion (10.9 m m greater). The thicker hu ll probably requ ired a sm aller boat so the [2.4473x10 12 2.44731x10 12 2.44695x10 12 2.44695x10 ] Altou gh these entries w ere very high, they still w ere of the sam e ord er and su bsequ ent attem pt to scale the d esign variables d id not provid e any im proved resu lts. This w as expected as the convergence history w as fairly straightforw ard as d epicted in Figu re 7. The fu nction approaches convergence at the sixth iteration of the algo- ESD.77 FINAL PROJECT SPRING 2010 7 We cond u cted a trad e off analysis at ou r single objective optim al point. We fou nd one extra ton of p ayload requ ired 326 kg of stru ctu ral w eight. rithm . ACKNOWLEDGMENT N one. REFERENCES [1] ABS Ru les, Steel Vessels 2007 Figure 7: Convergence 8 MULTI-OBJECTIVE OPTIMIZATION The tw o objective fu nctions are: Payload [tons] representing the cargo capacity of the barge (maximize). Structural Weight [tons] representing the material cost of mild steel needed to construct the barge (minimize). Since these tw o objectives w ere d ecou pled in the m o d el w e w ere able to optim ize the stru ctu ral w eight for d ifferent valu es of feasible p ayload . As can be d epicted from the Pareto front in Figu re 8, these tw o objectives are op posing. Fu nction evalu ations of barge d esigns have typically show n that larger pay load s w ere achieved by increasing the princip al d im ensions, w hich entails increased stru ctu ral w eight. The initial linear behavior is probably d ictated by the principal d im ensions’ low er bou nd s. Afterw ard s, the lim itations seem to be im posed by the variou s non -linear constraints. The u pper right corner is the single objective optim al solu tion for payload represented by the red circle. Figure 8: Pareto MIT OpenCourseWare http://ocw.mit.edu ESD.77 / 16.888 Multidisciplinary System Design Optimization Spring 2010 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms.