Scott Ashworth Learning About Voter Rationality University of Chicago APPLIED MICRO‐ECONOMICS
advertisement

APPLIED MICRO‐ECONOMICS WORKSHOP
Scott Ashworth
University of Chicago
Thursday, March 17, 2016
1:15pm ‐ 2:45pm
333 Sage Hall
PRESENTATION
Learning About Voter Rationality
Learning About Voter Rationality∗
Scott Ashworth†
Ethan Bueno de Mesquita‡
Amanda Friedenberg§
March 10, 2016
Preliminary and Incomplete. Please do not circulate.
∗
We are particularly indebted to Anthony Fowler. We have also benefited from comments by John Bullock,
Alan Gerber, Greg Huber, Claire Lim, Andrew Little, Neil Malhotra, Mike Ting, Dustin Tingley, Stephane Wolton,
seminar audiences at Emory, the Juan March Institute, Princeton, Vanderbilt, Virginia, Yale, and the participants
in the EITM Summer Institutes at Princeton (2012) and Mannheim (2014).
†
Harris School of Public Policy Studies, University of Chicago, email: sashwort@uchicago.edu
‡
Harris School of Public Policy Studies, University of Chicago, email: bdm@uchicago.edu.
§
W.P. Carey School of Business, Arizona State University, email: amanda.friedenberg@asu.edu
Scholars of voter behavior have long been interested in evaluating voters’ competence to fulfill
their electoral function. The early literature on voter competence asked whether or not voters were
sufficiently informed to make good decisions (Campbell et al., 1960; Fair, 1978; Kinder and Sears,
1985; Popkin, 1991; Sniderman, Brody and Tetlock, 1993; Lupia, 1994; Delli Carpini and Keeter,
1996). A more recent literature focuses on another aspect of the competence of voter decision
making—specifically, voter rationality.
The question of voter competence is, of course, central to normative debates about the merits
of electoral democracy (Downs, 1957; Campbell et al., 1960; Key, 1966; Fiorina, 1981; Fair, 1978;
Kinder and Sears, 1985; Popkin, 1991; Sniderman, Brody and Tetlock, 1993; Lupia, 1994; Delli
Carpini and Keeter, 1996). But it also raises crucial questions about important positive literatures.
As Fearon (1999) highlights, voter learning about incumbent politicians is the key mechanism
underlying modern models of electoral accountability. These models form the backbone of an
extensive theoretical literature that claims to provide positive insight into a variety of phenomena
including the incumbency advantage, term limits, judicial review, delegation, campaign finance,
local public good provision, special interest politics, the effects of the media, electoral pandering,
federalism, and electoral rules.1 If actual voters process information in a way that is dramatically
divergent from the way in which voters process information in these models, then we might worry
about the validity of the entire theoretical edifice.
This is precisely the conclusion reached by many contributors to an empirical literature that
seeks to assess voter rationality by examining how election outcomes respond to various shocks to
voter welfare. One strand of that literature examines the electoral consequences of natural disasters
and government responses to them (Abney and Hill, 1966; Achen and Bartels, 2004; Healy and
Malhotra, 2010; Healy, Malhotra and Mo, 2010; Bechtel and Hainmueller, 2011; Gasper and Reeves,
2011; Cole, Healy and Werker, 2012; Huber, Hill and Lenz, 2012; Chen, 2013). Another strand
examines the electoral consequences of economic shocks from outside the local economy (Ebeid and
Rodden, 2006; Wolfers, 2002; Leigh, 2009; Kayser and Peress, 2012). Many such studies report that
incumbent electoral fortunes suffer following negative events outside the control of policymakers
(Achen and Bartels, 2004; Wolfers, 2002; Leigh, 2009; Healy, Malhotra and Mo, 2010). These results
are typically interpreted as evidence of voter irrationality. The basic argument is that, if voters are
rational, then incumbents’ electoral fortunes should be unaffected by shocks to outcomes outside
of the incumbents’ control.2
1
For papers covering these various topics see, among many others, Banks and Sundaram (1993); Lohmann (1998);
Persson and Tabellini (2000); Canes-Wrone, Herron and Shotts (2001); Besley and Burgess (2002); Coate (2004);
Maskin and Tirole (2004); Ashworth (2005, 2006); Ashworth and Bueno de Mesquita (2006, 2008); Besley (2006);
Besley and Prat (2006); Myerson (2006); Gehlbach (2007); Gordon, Huber and Landa (2007); Fox and Van Weelden
(2010); Daley and Snowberg (2011); Fox and Jordan (2011); Fox and Van Weelden (2012); Fox and Stephenson (2011,
2015); Almendares and Le Bihan (2015); Eggers (2015).
2
Not all empirical studies find this result. A few studies find that voters do not seem to respond to irrelevant
shocks (Abney and Hill, 1966; Ebeid and Rodden, 2006; Kayser and Peress, 2012). Other studies find that the negative
electoral consequences of shocks to voter welfare are mitigated once they control for the quality of the government’s
response to the crisis (Healy and Malhotra, 2010; Bechtel and Hainmueller, 2011; Gasper and Reeves, 2011; Cole,
Healy and Werker, 2012). We address this latter branch of the literature in the Conclusion, where we discuss how
adding Incumbent effort would affect our analysis.
1
And, indeed, such findings have sparked a theoretical literature analyzing how specific failures rationality affect the equilibrium predictions in models of elections (Callander and Wilson,
2008; Patty, 2006; Ashworth and Bueno de Mesquita, 2014; Diermeier and Li, 2013; Ortoleva and
Snowberg, 2015; Levy and Razin, 2015a,b; Lockwood, 2015).
We challenge this interpretation of the empirical literature. This puts on us the burden of
answering the following question: Why would incumbent electoral fortunes suffer following a natural
disaster or economic downturn, if voters are rational? After all, rational voters certainly do not
punish politicians for events outside of the politicians’ control.
To get a sense of our answer, think about a simple example of the effect of hurricanes on
electoral fortunes. Hurricanes are random shocks, outside the control of the incumbent. But the
damage caused by a hurricane depends on the quality of infrastructure maintenance, emergency
preparedness, and so on.
Suppose there are two types of politicians—high quality and low quality. High quality incumbents do a good job preparing for storms, while low quality incumbents do a poor job. Rational
voters are concerned with selecting high quality politicians because they are expected to provide
good governance outcomes in the future (Fearon, 1999).
If a hurricane does not occur, the voters do not see the difference in preparedness. If a hurricane
comes, the voters do see the difference in preparedness. This means that the presence or absence
of a hurricane affects the amount of information the voter has about the incumbent—if there is a
hurricane the voters learn the incumbent’s quality and if there is no hurricane the voters do not.3
Let’s see that, in this example, disasters can affect the electoral fortunes of the incumbent.
Suppose, prior to observing the incumbent govern, the voters believe that the incumbent is more
likely to be high quality than is a future electoral challenger. If there is no hurricane, the voters
get no new information and, so, continue to believe the incumbent is more likely to be high quality.
Thus, they reelect the incumbent. If there is a hurricane, the voters learn the incumbent’s quality.
If that quality turns out to indeed by high, the incumbent wins reelection. But if that quality
turns out to be low, the incumbent loses. Hence, by providing the voters with new information, the
hurricane makes it possible that the incumbent will lose, something that never happens without a
hurricane. (Notice, if the voters started with the belief that the incumbent was less likely to be
high quality than the challenger, then the effect of the hurricane would be reversed.)
Now imagine an empiricist collects the data generated by this example. Some locations have
a hurricane and some do not. Since hurricanes happen by chance, the distribution of high and
low quality incumbents is the same in each. The empiricist first calculates the reelection rate in
locations that did not have a hurricane and finds it to be one. She then calculates the reelection
rate in locations that did have a hurricane. It is equal to the share of incumbents who were of
high quality—a number less than one. Hence, just as in the literature, she correctly finds that the
presence of a hurricane, for which the incumbent bears no responsibility, in fact causes a reduction
3
Our formal model does not make use of such stark differences in information. We do so here for expositional
simplicity.
2
in expected incumbent electoral fortunes. Our key point is that this is not evidence of voter
irrationality. Indeed, we have shown that, in this example, this must be the result when voters are
rational.
This example is, of course, contrived. But it raises an important question: In general, if voters
are rational, should we expect voter behavior and incumbent electoral fortunes to respond to events
outside the incumbent’s control? To answer this question, our main analysis builds on the canonical
model of voter learning (Achen, 1992; Bartels, 1993; Gerber and Green, 1999; Wolfers, 2002). In
Section 1, we show that under a knife-edge, but common, assumption the answer to that question is
no. However, in Sections 3 and 4, we show that moving away from that assumption by any amount
changes the answer to yes. Quite generally, rational voter behavior and incumbent electoral fortunes
do respond to events outside the incumbent’s control. How exactly they do so is subtle in ways
that our analysis elucidates.
1
When Shocks Have No Effect
We want to analyze how disasters effect voter behavior and electoral fortunes, using a Bayesian
learning framework that is standard in the literature (Achen, 1992; Bartels, 1993; Gerber and
Green, 1999). We adapt the specific model in Wolfers (2002), since it speaks directly to the issue
of observable shocks and electoral fortunes. In this specific model, the standard interpretation is
justified—if voters are rational, electoral fortunes do not depend on observable shocks. But, as we
will show in the sequel, this implication is knife-edge: It is driven by a special assumption made in
the literature; that assumption is made for reasons of tractability and not verisimilitude.
There are two politicians, an incumbent and a challenger. Each is either a good type (θ) or a
bad type (θ). The probability that politician p is a good type is πp ∈ (0, 1). The canonical model
in the literature instead has a normally distributed prior on type (and so a continuum of types).
The two-type structure will only simplify the analysis later.
In period t = 1, 2, the voter observes a governance outcome, gt , that depends on the incumbent’s
type θt , as well as two shocks:
gt = θt − ωt + t .
The first shock is an observable disaster which is the realization of a random variable with positive
support. We refer to a particular realization of this random variable, ωt , as the disaster intensity in
period t. There is also an unobservable shock which is distributed standard normal. Its realization
in period t is t . All the random variables are independent from one another.
In the election, the voter reelects the incumbent if the voter’s posterior belief that the incumbent
is a good type is higher than his prior belief that the challenger is a good type. Using Bayes’ rule,
the voter reelects if and only if
πI ϕ(g1 − θ + ω1 )
≥ πC ,
πI ϕ(g1 − θ + ω1 ) + (1 − πI )ϕ(g1 − θ + ω1 )
3
(1)
where ϕ is the standard normal pdf.
It is worth pausing here to see what the rational voter is doing. The voter is trying to learn
about θI , but observes g1 . The voter knows that g1 is biased and, in particular, is biased by the
disaster intensity ω1 . Hence, the voter “filters out” the bias caused by the disaster, adding ω1 to
g1 and then forming his posterior beliefs about the incumbent based on this filtered signal.
Rearranging inequality 1, the voter reelects if and only if
ϕ(g1 + ω1 − θ)
πC (1 − πI )
.
≥
ϕ(g1 + ω1 − θ)
1 − πC
πI
(2)
It can be shown that the left-hand side of this inequality is strictly increasing and continuous in
g1 + ω1 . So, there is a g1 + ω1 such that (1) holds with equality. Denote that value of g1 + ω1 by
r(πI , πC ) + ω1 . Observe that it depends on the priors πI , πC and the observed disaster intensity ω1 .
It is useful to think about r(·) as the benchmark—in terms of governance outcomes—that the
voter would adopt if there were no disaster (i.e., ω1 = 0). The voter then ratchets down that
benchmark by exactly ω1 if there is a disaster.
Now we can see how this model gives rise to the standard intuitions, by showing analogues of
Wolfers’s (2002) claim that “events unrelated to a governor’s competence should have no effect on
the voting decisions of rational agents” [p. 4, emphasis in original].
First, the voter updates her threshold for reelection to exactly offset the effect of disaster
intensity on governance outcomes. To see this, observe that a slight rearrangement gives us the
reelection threshold in terms of outcomes: The voter reelects if and only if
g1 ≥ r(πI , πC ) − ω1 .
So, if a disaster reduces government performance by 1, the voter reduces the reelection threshold
by exactly 1.
Second, the incumbent’s electoral fortunes do not depend on the presence or magnitude of a
disaster. The probability the incumbent is reelected is the probability that g1 ≥ r(πI , πC ) − ω1 .
That is, the probability the incumbent is reelection is
Pr(θI − ω1 + 1 ≥ r(πI , πC ) − ω1 ) = Pr(θI + 1 ≥ r(πI , πC )).
This is a constant function of ω1 , so incumbent electoral fortunes are indeed constant in disaster
intensity. The conclusion is consistent with the standard intuition.
Given these results and intuitions, the example we described in the introduction is perhaps
surprising. In that example, disasters did effect incumbent electoral fortunes. The key is that,
there, disaster intensity provided the voter with information about the incumbent’s type: When
there was no disaster (ω1 = 0), the voter had no information about preparedness. But when there
was a disaster (ω1 > 0), the voter had information about preparedness.
By contrast, in this additive model, the intensity of the disaster has no effect on the amount of
4
information available to the voter about the incumbent. Crucially, we will show that, whenever type
and disaster intensity are not additively separable in determining governance outcomes, the disaster
intensity affects how informative governance outcomes are about type. So, quite generally, if voters
are rational, then reelection thresholds will not exactly offset the effect of observable shocks and,
so, incumbent electoral fortunes will depend on those shocks. In this sense, the additive benchmark
that the literature has focused on is knife-edged.
2
The General Model
To formally discuss the effect of shocks on the amount of information available to the voter about
the incumbent, we need to generalize the model discussed in Section 1. We do so in this section,
where we allow for technologies in which the Incumbent’s type and the disaster intensity are not
additively separable.
2.1
Set Up
There is an Incumbent (I), a Challenger (C), and a Voter (V ). We refer to each Politician (P ) as
“she” and the Voter as “he.” In each of two governance periods, the Voter receives a governance
outcome that depends on the type of the Politician in office, an observable level of natural disaster,
and an unobservable, idiosyncratic shock. There is an election between the governance periods.
The set of types is Θ = {θ, θ}, where θ ≥ 0 is the bad type and θ > θ is the good type.
Write πP ∈ (0, 1) for the probability that Politician P is type θ. These probabilities are commonly
understood by the players. We will say that the Incumbent enters the first governance period
ahead if πI > πC and enters the first governance period behind if πI < πC .
The intensity of the natural disaster in period t is ωt ∈ Ω, where Ω is a nonempty, open interval
in R. Each ωt is the realization of a random variable that is independent of the Politician’s ability.
(The particular distribution will not be relevant.)
The governance outcome in a period is a function of a production technology and a random
shock. The production function f : Θ × Ω → R is strictly increasing in type (θ) and is strictly
decreasing in disaster intensity (ω). We will be interested in whether natural disasters amplify or
mute the effect of type on governance outcomes.
Definition 2.1.
(i) Disasters amplify the effect of type on governance outcomes if, for all ω 0 > ω,
f (θ, ω 0 ) − f (θ, ω 0 ) > f (θ, ω) − f (θ, ω).
(ii) Disasters mute the effect of type on governance outcomes if, for all ω 0 > ω,
f (θ, ω 0 ) − f (θ, ω 0 ) < f (θ, ω) − f (θ, ω).
5
Notice, with additive production, f (θ, ω 0 )−f (θ, ω 0 ) = f (θ, ω)−f (θ, ω). Thus, in that case, disasters
neither amplify nor mute the effect of type.4
If, in period t, the type of the Politician in office is θt , the disaster intensity is ωt , and the random
shock is t , the governance outcome in that period is f (θt , ωt ) + t . Each t is the realization of a
random variable. These random variables are independent of each other, of the Politicians’ abilities,
and of the disaster intensities. They are distributed according to an absolutely continuous CDF, Φ,
with a continuously differentiable PDF, φ. This distribution satisfies three additional requirements:
First, for each x > x0 ≥ 0, the associated likelihood ratio defined by
g 7→
φ (g − x)
φ (g − x0 )
is onto with non-zero derivatives. Second, the distribution satisfies the (strict) monotone likelihood ratio property (MLRP) relative to all possible realizations of production: If x > x0 , then
the associated likelihood ratio
φ (g − x)
φ (g − x0 )
is strictly increasing in g. Third, the PDF is symmetric: for each x ∈ R, φ(x) = φ(−x).
Prior to the game being played, Nature determines the realizations of each Politician’s type
and of the random shocks (in all periods). These realizations are not observed by any of the
players. Figure 2.1 depicts the timeline: In the initial governance period, the Voter observes the
disaster intensity and the governance outcome. This leads to the electoral stage, in which the Voter
chooses to reelect the Incumbent or replace her with a Challenger. The winner of the election is
the Politician in office in the second governance period. Again, the Voter observes the disaster
intensity and the governance outcome, g2 .
1st Governance Period
Election
2nd Governance Period
Figure 2.1. Timeline
The Voter’s payoffs are the sum of governance outcomes in the two periods.
2.2
Some Comments
Before turning to the analysis, we reflect on several features of the model.
First, notice that we are working with a “pure selection” model. That is, the politician in office
cannot influence the governance outcome by taking (potentially costly) actions. That outcome
is determined entirely by the politician’s type, the disaster, and the shock. This is clearly an
Definition 2.1 is a global requirement, i.e., requiring the function satisfy a condition for all ω 0 > ω. We can
relax this requirement to instead consider the following localized definition: Say disasters amplify the effect of type
at ω 00 > ω 0 if, for all ω ∈ (ω 0 , ω 00 ), f (θ, ω 00 ) − f (θ, ω 00 ) > f (θ, ω) − f (θ, ω) > f (θ, ω 0 ) − f (θ, ω 0 ). And, analogously, for
the mutes case.
4
6
abstraction from reality. And it might seem a consequential one, since an important empirical
literature argues that good responses to disasters mitigate the effect of those disasters on incumbent
electoral fortunes (Healy and Malhotra, 2010; Bechtel and Hainmueller, 2011; Gasper and Reeves,
2011; Cole, Healy and Werker, 2012).
Why do we abstract away from incumbent actions? In this paper, our goal is to explore what
the model has to say about what the empirical literature can say about Voter competence. A wellknown feature of agency models of elections—even those where politicians take actions—is that, if
voters are uncertain about the politician’s type, then at the time of the election, rational voters
are concerned only with “selecting good types,” i.e., with electing the politician who is expected
to perform best in the future (Fearon, 1999; Besley, 2006). Allowing politicians to take actions
can complicate the analysis of the voters’ inference problem (Ashworth, Bueno de Mesquita and
Friedenberg, 2015), but it does not change the logic of voter behavior in a fundamental way. As
such, for the questions that are of concern to us, a pure learning model simplifies the analysis with
no loss of insight.
Section 5 will return to this issue. There we discuss what our analysis has to say about the
empirical literature on the relationship between incumbent electoral fortunes and disaster response.
Second, when we move away from the additive model, disaster will either amplify or mute the
effect of type. As a consequence, it is important to understand when disasters may amplify or mute
the effect of type. Substantively, if disasters amplify the effect of type then incumbent competence
matters more for governance outcomes, when disasters are large. Suppose, as in the example in
the Introduction, that good types are better at maintaining infrastructure. In normal times, it is
hard to tell how well infrastructure has been maintained. But severe weather events will reveal
weaknesses in the infrastructure—levees will hold or break, for instance. In this case, disasters
amplify the effect of type. By contrast, if disasters mute the effect of type, incumbent competence
matters less for governance outcomes, when disasters are large. For instance, suppose that good
types are better at attracting investment. In normal times, good types will oversee better economic
performance. But a natural disaster might stop investment no matter the type of the incumbent.
In this case, disasters mute the effect of type.
These examples also provide a link to how informative governance outcomes are about the
Incumbent’s type. When disasters amplify (resp. mute) the effect of type, the difference in expected
performance between competent and incompetent types is larger (resp. smaller) following larger
disasters. Thus, during large disasters, it is easier (resp. harder) for voters to infer the incumbent’s
competence from noisy governance outcomes. (We formalize this link in Section 3 below.)
Third, we describe the Incumbent as ahead if πI > πC and behind if πI < πC . There are two
reasons this language makes sense. First, if the Incumbent is ahead then ex ante she is more likely
to win than to lose (and the opposite for an Incumbent who is behind). Second, if the Incumbent is
ahead (resp. behind), then absent any new information, the Incumbent wins (resp. loses) reelection.
7
2.3
Analysis
As in the additive model, the Voter adopts a cutoff rule in the space of governance outcomes.
We can characterize this cutoff with a condition analogous to Equation 2. The Voter reelects the
Incumbent if the first-period governance outcome, g1 , is greater than or equal to the (unique) ĝ(ω1 )
given by:
φ(ĝ(ω1 ) − f (θ, ω1 ))
1 − πI πC
.
=
φ(ĝ(ω1 ) − f (θ, ω1 ))
πI 1 − πC
Notice, ĝ(ω1 ) corresponds to r(πI , πC ) − ω1 from the additively separable model in Section 1.
For the analysis of Voter behavior, it will be convenient to work with the loglikelihood ratio,
`(g, ω1 ) ≡ log
φ(g − f (θ, ω1 ))
.
φ(g − f (θ, ω1 ))
We can equivalently define ĝ(ω1 ) as `(ĝ(ω1 ), ω1 ) = β(πI , πC ), where
1 − πI πC
β(πI , πC ) ≡ log
.
πI 1 − πC
Observe that β(πI , πC ) < 0 if the Incumbent is ahead and β(πI , πC ) > 0 if the Incumbent is behind.
Finally, we calculate the ex-ante probability the Incumbent wins reelection, given a disaster
intensity ω. The CDF of governance outcomes is given by
Γ(g; ω) = πI Φ(g − f (θ, ω)) + (1 − πI )Φ(g − f (θ, ω)).
Since the Voter adopts ĝ(ω) as the benchmark for reelection, the probability that the Incumbent
is reelected (given ω) is 1 − Γ(ĝ(ω); ω).
3
Voter Behavior
Section 1 focused on the case of additively separable production. In that model, the Voter’s
reelection threshold was monotonic in disaster intensity: The worse the disaster, the lower the
reelection threshold. This is intuitive. Because the production function is decreasing in disaster
intensity, an outcome that is sufficiently bad to merit replacement when there is a minor disaster,
might well lead to reelection following a larger disaster.
Indeed, in the additive model, something even stronger is true: An increase in disaster intensity
changes the distribution of outcomes. In a natural sense, the Voter’s reelection threshold changes
in a way that exactly offsets the effect of this change in the distribution of outcomes. This fact
appears to fit with the intuition motivating much of the empirical literature. As such, it will be
useful to be more precise about this idea.
For any given level of disaster intensity, ω, there is an outcome that such that the Voter’s
posterior belief about the Incumbent’s type is equal to his prior belief about the Incumbent’s type.
8
Refer to this outcome, written ν(ω), as the neutral news outcome. Outcomes that are above
(resp. below) the neutral news outcome raise (resp. lower) the Voter’s belief about the Incumbent’s
type.5 We refer to such outcomes as good news (resp. bad news) outcomes.
Because, at the neutral news outcome, the posterior probability that the Incumbent is a good
type equals the prior probability, we have
φ(ν(ω) − f (θ, ω)) = φ(ν(ω) − f (θ, ω)).
(3)
(This follows from Bayes’ rule.) That is, at the neutral news outcome, the likelihood of the outcome
given a good type equals the likelihood of the outcome given a bad type. Observe that the symmetry
of φ implies that we can write the neutral news outcome as:
ν(ω) =
f (θ, ω) + f (θ, ω)
.
2
An implication of this explicit solution is that the neutral news outcome shifts monotonically with
disaster intensity—the more intense the disaster, the lower the neutral news outcome.
In the case of the additive production function in Section 1, the neutral news outcome is
ν(ω) =
θ+θ
2
− ω. And the reelection threshold is ĝ(ω) = r(πI , πC ) − ω. Thus, if the disaster
intensity increases from ω to ω 0 , the Voter’s threshold decreases by the same amount as the neutral
news signal, namely, by |ω 0 − ω|.
Definition 3.1. Let ω 0 > ω. Voter behavior exactly offsets the effect of disasters if:
ĝ(ω 0 ) = ĝ(ω) + ν(ω 0 ) − ν(ω).
Voter behavior more than offsets the effect of disasters if the left-hand side is less than the righthand side and less than offsets the effect of disasters if the left-hand side is greater than the
right-hand side.
In the additive model, Voter behavior exactly offsets the effect of disasters. This fact will
not hold, quite generally, beyond the additive model. Moreover, without additive separability, the
Voter’s reelection threshold need not be monotonic with disaster intensity—larger disasters need not
lead the Voter to lower his benchmark for reelection. The key is that, for any production function
that is not additively separable, there is a second effect at work. Changes to disaster intensity
change how informative the outcome is about the Incumbent’s type (in the sense of Blackwell,
1951).
To illustrate these two effects, fix a level of disaster intensity ω. Each type θ generates a
distribution on outcomes, i.e., the probability of an outcome g = f (θ, ω) + is the probability that
= g − f (θ, ω). The Voter’s challenge is to figure out how likely it is that a particular governance
outcome came from the distribution associated with the good type (φ(g − f (θ, ω))) versus the
distribution associated with the bad type (φ(g − f (θ, ω))).
5
This follows from the MLRP.
9
f (θ , ω )
−4
ν (ω )
f (θ , ω )
4
2ι(ω )
−4
f (θ , ω ʹ)
ν (ω ʹ)
f (θ , ω ʹ)
4
2ι(ω ʹ)
Figure 3.1. Amplifies: Effect of Increase in Disaster on Conditional Distributions
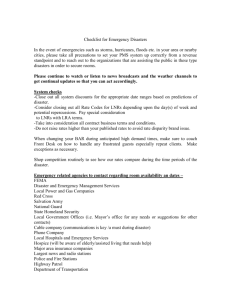
Refer to Figure 3.1. The top picture depicts the densities of outcomes associated with the
good type and the densities of outcomes associated with the bad type when the level of disaster
intensity is ω and the bottom picture depicts the densities of outcomes when the disaster intensity
is ω 0 > ω. In each picture, the density to the left corresponds to the bad type and the density to
the right corresponds to the good type. Note, because the level of disaster intensity is higher under
ω 0 versus ω, the mean of each density is lower under ω 0 versus ω. As a consequence, the neutral
news outcome, is lower under ω 0 versus ω. (Equation (3) says that the neutral news outcome is
found at the intersection of these two densities.)
Now let’s turn to the informational effect. Figure 3.1 was drawn for the case when disasters
amplify the effect of type. As a consequence, the distance between the mean of the two densities
is larger for ω 0 versus ω. This increased distance between the two densities corresponds to an
improvement in Voter information—informally, when the means of the densities are further apart,
it is easier for the Voter to determine which density a given signal came from.
It will be convenient to measure this informativeness effect as:
ι(ω) =
f (θ, ω) − f (θ, ω)
.
2
10
LHgL
{Hg, ΩL
0
Β HΠI ,ΠC L
g
g̀HΩL ΝHΩ'L
ΝHΩL
g
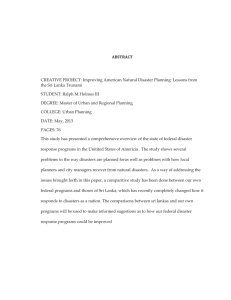
Figure 3.2. How Voter behavior responds to a shift in expected performance that ignores the effect
on informativeness. (Details on parameters used are in Appendix B.1.)
By Theorem 3.1 of Ashworth, Bueno de Mesquita and Friedenberg (2015), if ω 0 > ω and ι(ω 0 ) >
ι(ω), then outcomes are more informative (in the sense of Blackwell, 1951) about the incumbent’s
type when the disaster intensity is ω 0 then when the disaster intensity is ω. It’s easy to see that
disasters amplify (resp. mute) the effect of type if and only if ι(·) is increasing (resp. decreasing)
in disaster intensity. That is, governance outcomes are more informative (resp. less informative) to
the Voter following larger disasters if disasters amplify (resp. mute) the effect of type.
Observe that:
f (θ, ω) = ν(ω) + ι(ω)
and f (θ, ω) = ν(ω) − ι(ω).
As a consequence, for each ω ∈ Ω, we can express the loglikelihood ratio in terms of the variables
(g, ν(ω), ι(ω)),
`(g, ω) = log
φ(g − ν(ω) − ι(ω))
.
φ(g − ν(ω) + ι(ω))
This will allow us to separately analyze how changing the disaster intensity changes the Voter’s
behavior via a change in the neutral news outcome (ν(ω)) and a change in informativeness (ι(ω)).
Neutral News
Increasing disaster intensity from ω to ω 0 decreases the neutral news outcome from ν(ω) to ν(ω 0 ).
To understand how this effect impacts the reelection rule, let’s consider a thought experiment in
which there is a change to the neutral news outcome with no corresponding change in information.
To do so, define a new function:
L̃(g) = log
φ(g − ν(ω 0 ) − ι(ω))
.
φ(g − ν(ω 0 ) + ι(ω))
This function is obtained from `(·, ω) by decreasing the neutral news outcome from ν(ω) to ν(ω 0 ),
but leaving ι(ω) fixed. That is, this function is obtained by shifting `(·, ω) up. (See Lemma B.1,
which shows that, for any given g, L̃(g) < `(g, ω).)
11
{Hg, Ω'L
LHgL
{Hg, ΩL
0
Β HΠI ,ΠC L
g
g̀HΩ'L
g̀HΩL
ΝHΩ'L
ΝHΩL
g
Figure 3.3. How Voter behavior responds to a shift in expected performance and informativeness
when disasters amplify the effect of type. (Details on parameters used are in Appendix B.1.)
This upward shift is depicted in Figure 3.2. The dark solid line is the function `(·, ω); the fact
that it is increasing follows from the MLRP. The light solid line is the function L̃(·).6 Let us point
to several additional features: First, the neutral news outcome, ν(ω), is the outcome where the
loglikelihoood ratio `(·, ω) equals zero. Second, the reelection threshold, ĝ(ω), is the outcome where
the loglikelihood ratio `(·, ω) equals β(πI , πC ). This figure is drawn for a case where the Incumbent
is ahead—i.e., ex-ante the Incumbent is more likely than the Challenger to be a good type. In
this case β(πI , πC ) < 0 and, as a consequence, the reelection threshold, ĝ(ω), is smaller than the
neutral news outcome, ν(ω). Third, because L̃(·) lies above `(·, ω), L̃(·) intersects β(πI , πC ) at a
governance outcome g̃ that is lower than ĝ(ω).
This last fact reflects the intuition with which we began: The Voter wants to “filter out” the
mechanical effect of the shock on the expected outcome—i.e., he doesn’t blame the Incumbent for
events outside of her control. Because the neutral news outcome is worse (and there is no change in
informativness) the Voter is willing to reelect an Incumbent at a lower level of performance—i.e.,
use a more lax reelection standard. Figure 3.2 corresponds to this thought experiment of changing
the neutral news outcome with no corresponding information change. The fact that g̃ < ĝ(ω)
corresponds to the the standard intuition. And, in fact, the difference between ĝ(ω) and g̃ is
exactly the change in he neutral news outcome, i.e., ĝ(ω) − g̃ = ν(ω) − ν(ω 0 ). (See Lemma B.1.7 )
Informativeness
Now let’s add the informativeness effect. To do so, begin with the function L̃ and allow the
level of informativeness to change, going from ι(ω) to ι(ω 0 ). Figure 3.3 depicts the case where
disasters amplify the effect of type, so that more intense disasters are associated with increased
informativeness. As above, the neutral news outcome ν(ω 0 ) is the outcome where the loglikilihood
ratio `(·, ω 0 ) equals 0. That is, `(·, ω 0 ) intersects 0 at ν(ω 0 ). Notice, the loglikelihood ratio `(·, ω 0 )
6
In the figure, the two functions are parellel lines. This is true when φ is a normal density, but not true more
generally. Our argument will not rely on this feature of the graphs.
7
Observe that ν(ω 0 ) is the point at which L̃(ν(ω 0 )) = 0: By symmetry of φ, L̃(ν(ω 0 )) = log φ(−ι(ω))
= log 1.
φ(ι(ω))
12
intersects the function L̃(·) at this neutral news outcome. This is because the two functions differ
only in their level of informativeness—holding the neutral news outcome fixed.
Increasing informativeness is equivalent to a given increase in the governance outcome inducing
a larger increase in the Voter’s loglikelihood ratio. Geometrically this means that the graph of the
loglikelihood ratio becomes steeper—specifically the graph of `(·, ω 0 ) is steeper than the graphs of
both `(·, ω) and L̃(·). As a consequence, `(·, ω 0 ) is a rotation of L̃ around the point ν(ω 0 ).
How does this rotation affect the reelection threshold? Without the informativeness effect,
the Voter would have been indifferent between the Incumbent and Challenger at the governance
outcome g̃. In Figure 3.3, the Incumbent is ahead and so g̃ is less than ν(ω 0 ); so, g̃ is a bad news
outcome. But, an increase in informativeness makes bad news worse. So, increasing informativeness
lowers the Voter’s expectation of the Incumbent’s type, given an observation of g̃. Putting the two
effects together, the Voter strictly prefers the Challenger to the Incumbent when the governance
outcome is g̃. This is why, in Figure 3.3, `(g̃, ω 0 ) < β(πI , πC ). Since `(ĝ(ω 0 ), ω 0 ) = β(πI , πC ), it
follows from the MLRP that ĝ(ω 0 ) > g̃. Substantively, when the Incumbent is ahead, the Voter
is indifferent between the Incumbent and the Challenger when the news about the Incumbent is
somewhat bad. When the governance outcome becomes more informative, this bad news is worse,
so the Voter is no longer indifferent—he strictly prefers the Challenger. Hence, the Voter shifts to
a more stringent reelection rule.
Overall Effect
In sum, when the Incumbent is ahead and disasters amplify the effect of type, the informativeness
effect and neutral news effect work in opposite directions: the latter serves to lower the Voter’s
benchmark for reelection and the former serves to increase it. The overall effect is that ĝ(ω 0 ) > g̃
and so Voter behavior less than offsets the effect of a disaster. More surprisingly, it is possible for
the informativeness effect to swamp the neutral news effect. That is, sometimes the Voter holds
the Incumbent to a more stringent reelection threshold following a more intense disaster—i.e.,
ĝ(ω 0 ) > ĝ(ω). Such a case is illustrated in Figure 3.4. (See Appendix B.1 for numerical examples
that generate the pictures in Figures 3.3-3.4.)
This counterintuitive result causes problems relative to standard intuitions about rational voter
behavior: Not only is it incorrect to assert that rational Voter behavior exactly offsets the effect of
disasters, a rational voter’s reelection threshold need not even move in the opposite direction from
disaster intensity.
The situation is reversed when the Incumbent is behind. In that case, g̃ > ν(ω 0 ) and so g̃
is a good news outcome. An increase in informativeness makes good news better news. As a
consequence, at g̃, an increase in informativeness makes it more likely that the Incumbent is a
good type and so further lowers the Voter’s benchmark. That is, both the neutral news and the
informativeness effects work in the same direction. As a consequence, Voter behavior more than
offsets the effect of disasters.
Now consider the case where disasters mute the effect of type on outcomes. Now, when the level
13
{Hg, Ω'L
LHgL
{Hg, ΩL
0
Β HΠI ,ΠC L
g
g̀HΩL
g̀HΩ'L
ΝHΩ'L
g
ΝHΩL
Figure 3.4. A case where disasters amplify the effect of type and the informational effect dominates
the expected performance effects, so the Voter uses a more stringent reelection rule following a
more intense disaster. (Details on parameters used are in Appendix B.1.)
LHgL
{Hg, Ω'L
0
{Hg, ΩL
Β HΠI ,ΠC L
g̀HΩ'L
g
g̀HΩL ΝHΩ'L
ΝHΩL
g
Figure 3.5. How Voter behavior responds to a shift in expected performance and informativeness
when disasters mute the effect of type. (Details on parameters used are in Appendix B.1.)
of disaster intensity rises, there is a decrease in informativeness. This implies that the likelihood
ratio `(·, ω 0 ) is a rotation of L̃ at ν(ω 0 ) that is shallower than L̃. This is illustrated in Figure
3.5, which shows that the implications are reversed: If the Incumbent is ahead, g̃ is a bad news
outcome—an increase in disaster intensity lowers informativeness and, in turn, tempers bad news.
Hence, both the neutral news and informational effects serve to lower the Voter’s benchmark. The
overall result is that Voter behavior more than offsets the effect of disasters. By contrast, if the
Incumbent is behind, g̃ is good news and the two effects work in opposite directions. In that case,
Voter behavior less than offsets the effect of disasters. (Again, the counterintuitive shift in the
reelection threshold is possible.)
Table 3.1 summarizes these results, which are formalized as Proposition B.1 in the Appendix.
When πI = πC , Voter behavior exactly offsets the effect of disaster. However, when πI 6= πC , Voter
behavior either more than or less than offsets the effect of disaster.
14
Amplifies
Mutes
Ahead
Less than offsets
More than offsets
Behind
More than offsets
Less than offsets
Table 3.1. How Voter Behavior Responds to Disasters
4
Electoral Fortunes
In this section, we investigate how a change in the level of disaster intensity effects the Incumbent’s
electoral fortunes. In the additive model, we saw that an increase in the level of disaster intensity
did not alter the probability of reelection. We will now see that, when disasters provide information
about the Incumbent’s type, the Incumbent’s electoral fortunes may well be altered by the level of
disaster intensity. In particular, the Incumbent may well be hurt by (or benefit from) the disaster.
The probability of reelection is determined by two things: the reelection rule the voter uses
(ĝ(·)) and the distribution of governance outcomes Φ(·). Recall that, for a given disaster intensity
ω, the CDF of governance outcomes is
Γ(g; ω) = πI Φ(g − ν(ω) − ι(ω)) + (1 − πI )Φ(g − ν(ω) + ι(ω)).
If the Voter adopts ĝ(ω) as the benchmark for reelection, the probability that the Incumbent is
reelected (given ω) is 1 − Γ(ĝ(ω); ω).
Changes to disaster intensity affect the probability of reelection by changing both the reelection
rule and the distribution of governance outcomes.
As we saw in the previous section, a change in disaster intensity has two effects on the reelection
rule. The first is a neutral news effect—the reelection rule changes to offset the change in productivity (holding fixed the level of informativeness). The second is an informativeness effect—the
reelection rule changes to incorporate the change in information about the Incumbent’s type.
A change in disaster intensity also affects the distribution of outcomes through two analogous
effects. Separating these, along with the two effects on the reelection rule already discussed, will
allow us to clarify the overall effect of disaster intensity on electoral fortunes.
As we did in the previous section, we will start by studying the neutral news effect. We will see
that the effect of a change in neutral news (absent any information effect) on the reelection rule
exactly offsets the change in the distribution of outcomes associated with the neutral news shift.
That is, if all a change in disaster intensity did was shift the neutral news outcome, there would be
no effect on electoral fortunes.
We will then turn to the effect of disasters on information. An increase in informativeness
is associated with a shift of probability mass toward the tails of the distribution of governance
outcomes. (We will be formal about what this means below.) That is, an increase in disaster
15
intensity that increases informativeness makes both very good and very bad outcomes more likely
(though not necessarily symmetrically). Even if the reelection rule did not change, this change
in the distribution of outcomes would already have an effect of electoral fortunes. Of course, as
we’ve already seen, the reelection rule also changes. To understand the overall impact of disaster
intensity on electoral fortunes, we put all of these effects together.
Neutral News
Let’s start with the offsetting neutral news effects. Toward that end, as we did above, consider a
hypothetical situation in which the Voter ignores the change in informativeness—holding it fixed
at ι(ω)—and instead simply filters out the effect of a disaster on the likelihood of observing any
given level of public goods. In this case, the relevant CDF of governance outcomes is
Γ̃(g) = πI Φ(g − ν(ω 0 ) − ι(ω)) + (1 − πI )Φ(g − ν(ω 0 ) + ι(ω)).
Notice that, for any g, Γ(g; ω) > Γ̃(g), so that this new CDF can be seen as a downward shift
of the original CDF on governance outcomes Γ(·, ω). That is, the distribution of outcomes gets
worse when disasters are more intense. (Formally, Γ(·, ω) first-order stochastically dominates Γ̃.)
Because the Voter filters out the effect of a disaster on the likelihood of observing any given level
of public goods (and ignores the informational effect), he adopts a benchmark for reelection that
exactly offsets the effect of a disaster. We found this benchmark in the previous section, it is
g̃ = ĝ(ω) − ν(ω) + ν(ω 0 ) (instead of the actual benchmark ĝ(ω 0 )). Overall, these two changes—in
the distribution of outcomes and the reelection rule—leave the probability of reelection unchanged,
i.e., 1 − Γ̃(g̃) = 1 − Γ(ĝ(ω); ω).
Notice that the analysis of the neutral news effect corresponds exactly to the additive model.
There, changing the level of disaster intensity leaves the level of informativeness unchanged. So,
the new distribution of governance outcomes, Γ(g; ω 0 ), corresponds exactly to the distribution Γ̃.
Moreover, as we have seen, in that case, the Voter’s actual new benchmark ĝ(ω 0 ) exactly offsets
the effect of disaster (i.e., ĝ(ω 0 ) = g̃). Thus, 1 − Γ̃(g̃) = 1 − Γ(ĝ(ω 0 ); ω 0 ). That said, when changing
the level of disaster changes the level of informativeness, these two properties no longer hold: The
new actual distribution Γ(·, ω 0 ) is typically different from the ‘shifted down’ distribution Γ̃ and the
new benchmark for reelection ĝ(ω 0 ) typically does not exactly offset the effect of disaster.
Informativeness
Given the analysis above, any effect of disasters intensity on electoral fortunes must work through
informativeness. We’ve already seen how the informativeness effect changes the reelection rule. So,
let’s now consider the effect of informativeness on the distribution of governance outcomes.
To do so, we begin with the hypothetical distribution Γ̃ and change only the level of informativeness from ι(ω) to ι(ω 0 ); this leads to the new distribution Γ(·; ω 0 ). Figure 4.1 depicts the
relationship between the new distribution Γ(·; ω 0 ) and the neutral news distribution Γ̃(·). The new
16
G
GH × ; Ω'L
G
GH × ; Ω'L
g
g
g
(a) Disasters Amplify the Effect of Type
g
(b) Disasters Mute the Effect of Type
Figure 4.1. How Informativeness Changes the Distribution of Outcomes
distribution is a rotation of Γ̃ around some point, namely g. (The particular point depends on both
ω and ω 0 .) The nature of the rotation depends on whether disasters amplify vs. mute the effect
of type. Figure 4.1a focuses on the case of amplifies. There, when the governance outcome g is
below g, the new true distribution lies above the neutral news distribution—that is, if g > g, then
Γ(g, ω 0 ) > Γ̃(g). Figure 4.1b focuses on the case of mutes. There, when the governance outcome
g is below g, the new true distribution lies below the neutral news distribution—that is, if g > g,
then Γ̃(g) > Γ(g, ω 0 ). Matters are reversed for g > g. This single-crossing relationship between
these CDFs formalizes the idea, discussed at the beginning of this section, that an increase in
informativeness is associated with a shift of probability mass toward the tails of the distribution of
governance outcomes. (Because g need not equal 1/2, this shift need not be symmetric.)
This change in the distribution of outcomes has a direct effect on the probability of reelection.
That is, it would directly influence the probability of reelection, even if the Voter were to adopt
a threshold for reelection that exactly offsets the effect of disaster. To see this, focus on the case
where disasters amplify the effect of type and recall that g̃ is the outcome level that exactly offsets
the effect of disaster. If g̃ were below g, the change in the distribution of outcomes would result
in a lower the probability of reelection (i.e., 1 − Γ(g̃; ω 0 ) < 1 − Γ̃(g̃) = 1 − Γ(g; ω)) and if g̃ were
above g the change in the distribution of outcomes would raise the probability of reelection (i.e.,
1 − Γ(g̃; ω 0 ) > 1 − Γ̃(g̃) = 1 − Γ(g; ω)).
This fact captures an important intuition. When the Incumbent is way ahead, g̃ is below g.
Such an incumbent will only be replaced if there is a very bad governance outcome. In this case,
an increase in informativeness lowers the probability of reelection because moving probability mass
to the tails increases the likelihood of such an outcome. (It also increases the likelihood of a very
good outcome, but that doesn’t matter for such an incumbent.) By contrast, when the Incumbent
is way behind, g̃ is above g. In this case an increase in informativeness raises the probability of
reelection because such an Incumbent will only be reelected if the governance outcome is very good.
Of course, the analysis above does not tell the whole story. Disaster intensity has a second
effect on the probability of reelection: the Voter’s benchmark for reelection does not exactly offset
17
G
GH × ; Ω'L
GHg̀HΩ'L;Ω'L
GHg ;Ω'L
GHg L
g
g̀HΩ'L
g
g
Figure 4.2. Amplify and g̃ < ĝ(ω 0 ) < g: Probability of Reelection Falls
the effect of disaster. That is, ĝ(ω 0 ) 6= g̃. We will see that whether this effect serves to increase or
decrease the probability of reelection depends on whether the benchmark more than or less than
offsets the effect of disaster.
To illustrate this indirect effect, focus on the case where disasters amplify the effect of type and
g > g̃. Figure 4.2 depicts the case where the benchmark less than offsets the effect of disaster, i.e.,
ĝ(ω 0 ) > g̃. In this case,
Γ(ĝ(ω 0 ); ω 0 ) > Γ(g̃; ω 0 ) > Γ̃(g̃).
Here, the direct and indirect effects work in the same direction and so the probability that the
Incumbent is reelected falls.
Overall Effect
Figure 4.3 depicts the case where the benchmark more than offsets the effect of disaster, i.e.,
g̃ > ĝ(ω 0 ). In this case, the indirect effect causes the Voter to lower his benchmark for reelection
and thereby increase the probability that the Incumbent is reelection. Thus, the direct and indirect
effect work in opposite directions. Figure 4.3a depicts the case where the direct effect dominates
the indirect effect (causing the probability of reelection to fall) and Figure 4.3b depicts the case
where the indirect effect dominates the direct effect (causing the probability of reelection to rise).
Table 4.1 summarizes when the Incumbent’s fortunes will increase versus decrease, based on
whether (a) disasters amplify or mute the effect of type, (b) Voter behavior more than or less than
offsets the effect of disasters, and (c) the outcome that exactly offsets the effect of disaster lies above
or below the rotation point. In boxes labeled with [?], the direct and indirect effects compete, and
so the Incumbent’s electoral fortunates can either increase or decrease.
[NOTE: Comment from Amanda to Ethan and Scott: This next discussion seems very economicsy
to me. What we really want to express is ”and this is important from the perspective of getting the
18
G
G
GH × ; Ω'L
GH × ; Ω'L
GHg ;Ω'L
GHg L
GHg ;Ω'L
GHg̀HΩ'L;Ω'L
GHg L
GHg̀HΩ'L;Ω'L
g̀HΩ'L g
g
g
g
g̀HΩ'L
(a) Probability of Reelection Falls
g
g
(b) Probability of Reelection Rises
Figure 4.3. Amplifies and ĝ(ω 0 ) < g̃ < g
Amplifies
Mutes
g̃ > g
?
Reelec Prob ↓
g̃ < g
Reelec Prob ↓
?
Amplifies
Mutes
g̃ > g
Reelec Prob ↑
?
g̃ < g
?
Reelec Prob ↑
ĝ(ω 0 ) > g̃
g̃ > ĝ(ω 0 )
Table 4.1. Change in Electoral Fortunes
empirical identification correct.” This is not coming across.] While the first of these factors, i.e., (a),
is a primitive of the model, the latter two, i.e., (b)-(c), are endogenous aspects of the model. We
have already seen that (b) can be determined based on (a) and whether the Incumbent is ahead
or behind. (Refer to Table 3.1.) In fact, we can likewise determine whether (c) holds based on
primitives of the model.
Refer to Figure 4.4, which depicts the situation where disasters amplify the effect of type. The
shaded region indicates the the pairs (πI , πC ) for which the reelection probability rises and the nonshaded regions correspond to the pairs for which the reelection probability falls. When (πI , πC ) =
( 12 , 12 ), the neutral news outcome g̃ correspond exactly to the rotation point g and the Voter exactly
offsets the effect of disaster. Thus, that case acts as the additive model and the Incumbent neither
benefits from nor is hurt by the effect of disaster. But, for any pair (πI , πC ) 6= ( 12 , 12 ), the Voter
either benefits from or is hurt by the effect of disaster.
Notice that, when πC ≥ max{ 12 , πI }, the Incumbent’s electoral fortunes necessarily benefit from
the effect of disaster. In that case, disasters increase the Incumbent’s probability of reelection
through both the direct and indirect effects. Likewise, when min{ 12 , πI } ≥ πC disasters decrease
the Incumbent’s probability of reelection through both the direct and indirect effects. Proposition
C.1 in the Appendix shows these claims. Proposition C.7 in the Appendix shows analogous claims
for the case when disasters mute the effect of type. The Appendix also explains why these primitives
19
ΠC
1
0.5
0.5
1
ΠI
Figure 4.4. Amplifies: Shaded Reelection Probability Rises
correspond to the boxes in Table 4.1.
5
Conclusion
In their seminal paper, Achen and Bartels (2004, pp.7–8) write “To the extent that voters engage in
sophisticated attributions of responsibility they should be entirely unresponsive to natural disasters,
at least on average; to the extent that they engage in blind retrospection, they should exhibit
‘systematic attribution errors’.” This conclusion is reflective of a large empirical literature. That
literature argues that, because natural disasters are outside the control of incumbents, their electoral
fortunes will systematically suffer following natural disasters only if voters are irrational. This
argument has, further, motivated a variety of new models of elections with non-rational voters
(Callander and Wilson, 2008; Patty, 2006; Ashworth and Bueno de Mesquita, 2014; Diermeier and
Li, 2013; Ortoleva and Snowberg, 2015; Levy and Razin, 2015a,b; Lockwood, 2015).
Our results suggest that this interpretation is not warranted. We study a canonical model
of voter learning. We have shown that, in all but knife-edged cases, rational voters behavior
implies that disasters—and other shocks outside the control of policy makers—will affect incumbent
electoral fortunes.
There is a strand of empirical work which argues that incumbent electoral fortunes are helped
by effective disaster response (Bechtel and Hainmueller, 2011; Healy and Malhotra, 2009, 2010).
These findings are typically interpreted as evidence for voter rationality.8 In this paper, we abstract
8
Because disaster response is post-treatment, it may be endogenous to anticipated electoral competitiveness and
so identification is often difficult.
20
away from Incumbent behavior (assuming that Incumbent’s cannot take any actions), so our work
does not directly speak to this literature. Nonetheless, in light of several prominent models in the
political agency literature, such conclusions should also be treated with caution.
To understand why it will be useful to distinguish between two models. First, suppose all
incumbents are known to have the same quality, but are differentiated based whether or not they
are intrinsically motivated to work on behalf of voters (this is as in Myerson, 2006). In such
a model, effort toward disaster response is direct evidence that a politician is more likely to be
a good type and so, higher effort leads to a greater probability of reelection. In that case, the
relationship between the disaster response and incumbent electoral fortunes is, in fact, consistent
with the interpretation of the empirical literature.
Now, instead, suppose all incumbents are known to have identical motivations, but are differentiated by how competent they are believed to be. In such a model, an incumbent who expects to win
handily has weaker incentives to work hard than does an incumbent who expects a close election.
Thus an increase in the prior probability that the incumbent is competent leads to both a greater
probability of reelection and lower effort. Such a model can easily predict a negative relationship
between incumbent effort and expected incumbent electoral fortunes. (An earlier version of this
paper [CITE working paper], we showed this formally, in a model where governance outcomes are
the sum of competence, effort, an observable shock, and an unobservable shock.)
The comparison of these models highlights two points. First, assessing the rationality of voter
responses to incumbent effort requires understanding which aspects of incumbent type voters are
learning about, in their attempt to predict future performance. Second, regardless of the source of
uncertainty or the predicted relationship between effort and incumbent electoral fortunes, rational
voters do not follow a logic of reward and punishment. Instead, they vote based on their observations of past behavior and outcomes solely because such observations are informative about future
performance.
Taken together with the results in this paper, this raises challenges for identifying voter rationality. The empiricist would need to identify aspects of the learning environment that are currently
ignored by empirical work. An alternate approach may be to identify voter irrationality instead of
directly identifying voter rationality. As we’ven noted, a recent literature explores the implications
of specific failures of rationality for equilibrium predictions in models of elections (Callander and
Wilson, 2008; Patty, 2006; Ashworth and Bueno de Mesquita, 2014; Diermeier and Li, 2013; Ortoleva and Snowberg, 2015; Levy and Razin, 2015a,b; Lockwood, 2015). At this point, much of the
literature has been concerned with normative questions—demonstrating that certain types of voter
irrationality can improve democratic performance, at least sometimes. As the literature develops,
it may produce predictions that distinguish equilibria with fully rational voters from equilibria with
less rational voters. These can then be used to further guide the empirical literature.
21
A
Preliminary Results
In this Appendix, we report a preliminary result that will be useful in the subsequent analysis.
Lemma A.1. Consider a function L : R × R+ → R+ given by
L(x, δ) =
φ(x − δ)
.
φ(x + δ)
(i) L is increasing in δ if x > 0.
(ii) L is constant in δ if x = 0.
(iii) L is decreasing in δ if x < 0.
The proof can be found in Ashworth, Bueno de Mesquita and Friedenberg (2015) (Lemma B2).
B
Supporting Material for Section 3
The following Proposition formalizes the results reported in Table 3.1:
Proposition B.1. Fix ω 0 > ω.
(i) Suppose disasters amplify the effect of type. Then πI ≥ πC if and only if ν(ω) − ν(ω 0 ) ≥
ĝ(ω) − ĝ(ω 0 ) and πC ≥ πI if and only if ĝ(ω) − ĝ(ω 0 ) ≥ ν(ω) − ν(ω 0 ).
(ii) Suppose disasters neither amplify nor mute the effect of type. Then, for any πI and πC ,
ν(ω) − ν(ω 0 ) = ĝ(ω) − ĝ(ω 0 ).
(iii) Suppose disasters mute the effect of type. Then πI ≥ πC if and only if ĝ(ω) − ĝ(ω 0 ) ≥
ν(ω) − ν(ω 0 ) and πC ≥ πI if and only if ν(ω) − ν(ω 0 ) ≥ ĝ(ω) − ĝ(ω 0 ).
Observe that the statement of the proposition has implications for strict inequalities: Suppose
disasters amplify the effect of type and πI > πC . Then we can apply the fact that “πI ≥ πC ” and
“not πC ≥ πI ” to obtain that ν(ω) − ν(ω 0 ) > ĝ(ω) − ĝ(ω 0 ).
This Proposition follows from two Lemmata. The first formalizes the discussion surrounding
Figure 3.2.
Lemma B.1. Fix ω 0 > ω.
(i) For each g, L̃(g) > `(g, ω).
(ii) If L̃(g̃) = β(πI , πC ), then ĝ(ω) − g̃ = ν(ω) − ν(ω 0 ).
Proof. Observe that, for each g, there exists some g 0 > g so that g = g 0 + (ν(ω 0 ) − ν(ω)). Since
L̃(g) = log
φ(g 0 − ν(ω) − ι(ω))
φ(g − ν(ω 0 ) − ι(ω))
=
log
= `(g 0 , ω)
φ(g − ν(ω 0 ) + ι(ω))
φ(g 0 − ν(ω) + ι(ω))
22
and `(g 0 , ω) > `(g, ω), it follows that L̃(g) > `(g, ω).
If L̃(g̃) = β(πI , πC ), then
log
φ(g̃ − ν(ω 0 ) − ι(ω))
φ(ĝ(ω) − ν(ω) − ι(ω))
= log
.
φ(g̃ − ν(ω 0 ) + ι(ω))
φ(ĝ(ω) − ν(ω) + ι(ω))
By the strict MLRP, this implies that g̃ − ν(ω 0 ) = ĝ(ω) − ν(ω).
The second lemma formalizes the “rotation” effect discussed surrounding Figures 3.3, 3.4, and 3.5.
Lemma B.2. Fix ω 0 > ω.
(i) Suppose disasters intensity the effect of type. Then g ≥ ν(ω 0 ) if and only if `(g, ω 0 ) ≥ L̃(g)
and g ≤ ν(ω 0 ) if and only if `(g, ω 0 ) ≤ L̃(g).
(ii) Suppose type and disaster mute the effect of type. Then g ≥ ν(ω 0 ) if and only if `(g, ω 0 ) ≤ L̃(g)
and g ≤ ν(ω 0 ) if and only if `(g, ω 0 ) ≥ L̃(g).
[NOTE: I changed the omegas to omega’s, since i think that was an error. Also, i turned it to iff
statements about weak inequaliies since that implies the stronger statements.] Proof. Immediate
from Lemma A.1.
Note, again, that while these statements involve weak inequalities they have implications about
strict inequalities. For instance, if disasters amplify the effect of type and g > ν(ω 0 ) then, using
the fact that “not g ≤ ν(ω 0 )” it follows that `(g, ω 0 ) > L̃(g).
Proof of Proposition B.1.
We show the result when disasters amplify the effect of type and
πI ≥ πC ; the other cases are analogous.
Since πI ≥ πC , β(πI , πC ) ≤ 0. From this, ĝ(ω) < ν(ω) and Lemma B.2 implies that
β = `(ĝ(ω), ω) < L̃(ĝ(ω)).
This implies that the g̃ that solves L̃(g̃) = β satisfies g̃ < ĝ(ω). Thus ν(ω 0 ) − ν(ω) = ĝ(ω 0 ) − g̃ >
ĝ(ω 0 ) − ĝ(ω).
B.1
Computational Examples
Figures 3.2–3.5 were drawn based on numerical examples. We now give details on the numerical
examples, to illustrate that the effects depicted can indeed arise. [NOTE: Elaborate?]
The examples have several features in common: In each, φ is the pdf of a standard normal
random variable: φ(x) = √12π exp −x2 /2 . Also, in each πC = 21 , ω 0 = 21 , and ω 00 = 1. The
23
examples vary in the production function and the choice of πI . These choices are described in
Table B.1.
Figure 3.4 depicted the case where, when disaster intensity increased, the benchmark for reelection rose, i.e, ĝ(ω 00 ) > ĝ(ω 0 ). We show this fact analytically. Using the formula for the normal
pdf,
`(g, ω) = 2ι(ω) (g − ν(ω)) .
So we can solve explicitly for ĝ:
ĝ(ω) =
β(πI , πC )
+ ν(ω).
2ι(ω)
Using the parameters in the middle column of Table B.1, we calculate ν(ω) =
and β(πI , πC ) = −2. Then
ĝ(ω 0 ) = −
2−3ω
2 ,
ι(ω) =
ω
2,
10
15
> − = ĝ(ω 00 ).
4
4
Thus, as the disaster becomes more intense, the reelection threshold becomes more stringent.
I
[NOTE: Comment from Amanda: Is β correct? Since πC = .5, β = log( 1−π
πI ). Using the table above,
I get something different.]
exp(2)
From the File’s computation:
1− 1+exp(2)
exp(2)
1+exp(2)
1 + exp(2)
−1
exp(2)
log(1 + exp(2)) − 2 − 1)
If we want β = −2 then
I
log 1−π
πI = −2
1−πI
πI
= exp(−2)
1 − πI = πI ∗ exp(−2)
πI =
1
1+exp(−2)
On the other hand, its not obvious to me from the calculations above that ĝ(ω) involves β = −2.
ĝ(ω) = −
f (θ, ω)
f (θ, ω)
πI
1
+ ν(ω).
ι(ω)
3.2 & 3.3
1−ω
1 − 4ω
Figure
3.4
1−ω
1 − 2ω
3.5
4 − 2ω
1−ω
1
1+exp(−2.5)
exp(2)
1+exp(2)
1
1+exp(−2.5)
Table B.1. Parameters for the numerical examples.
24
ĝ(ω 0 ) = −
2
.5
+ = −4 + (1/4)
.5
2
ĝ(ω 00 ) = −
C
1
− .5 = −1.5.
.5
Proofs for Section 4
[NOTE: Can we find a better term than ”the election is not random”?]
Say that the election is random if πI = πC = 12 . In what follows, we will restrict attention to
elections that are not random. This Appendix will show the following results.
Proposition C.1. Suppose disasters amplify the effect of type and the election is not random.
(i) If πC ≥ max{ 12 , πI }, then 1 − Γ(ĝ(ω 0 ); ω 0 ) > 1 − Γ(ĝ(ω); ω).
(ii) If min{ 21 , πI } ≥ πC , then 1 − Γ(ĝ(ω); ω) > 1 − Γ(ĝ(ω 0 ); ω 0 ).
Proposition C.2. Suppose disasters mute the effect of type and the election is not random.
(i) If min{πI , 21 } ≥ πC , then 1 − Γ(ĝ(ω 0 ); ω 0 ) > 1 − Γ(ĝ(ω); ω).
(ii) If πC ≥ max{ 21 , πI }, then 1 − Γ(ĝ(ω); ω) > 1 − Γ(ĝ(ω 0 ); ω 0 ).
We begin by analyzing how the change in informativeness—going form Γ̃ to Γ(·, ω 0 )—rotates the
distribution of public goods. We then use this fact to conclude whether the reelection probability
would increase or decrease, depending on where g̃ lies relative to the rotation point and whether
the incumbent is ahead versus behind. Finally, we conclude by providing parameters of the model
that pin down where g̃ lies relative to the rotation point.
The Effect of Informativeness: Rotating the Distribution Γ̃
Write
G(x; δ) = πI Φ(x − δ) + (1 − πI )Φ(x + δ).
Observe that
∂G
(x; δ) = −πI φ(x − δ) + (1 − πI )φ(x + δ).
∂δ
Notice that Γ̃(g) = G(g − ν(ω 0 ), ι(ω)) and Γ(g; ω 0 ) = G(g − ν(ω 0 ), ι(ω 0 )). Thus, we will be interested
in how the function G(x; δ) responds to changes in δ.
Lemma C.1. Fix δ 0 6= δ. There is exactly one x such that G(x; δ 0 ) = G(x; δ). Moreover:
(i) For δ 0 > δ: If x > x then G(x; δ 0 ) > G(x; δ) and if x > x then G(x; δ) > G(x; δ 0 ).
25
(ii) For δ > δ 0 : If x > x then G(x; δ) > G(x; δ 0 ) and if x > x then G(x; δ 0 ) > G(x; δ).
The level x that solves G(x; δ 0 ) = G(x; δ) will typically depend on both δ and δ 0 .
To show Lemma C.1, it will be useful to fix δ 0 6= δ and define auxiliary functions ∆(·) : R → R
and Ξ(·) : R → R so that
∆(x) = G(x; δ 0 ) − G(x; δ)
= πI Φ(x − δ 0 ) − Φ(x − δ) + (1 − πI ) Φ(x + δ 0 ) − Φ(x + δ)
and
Ξ(x) = −
Φ(x − δ 0 ) − Φ(x − δ)
.
Φ(x + δ 0 ) − Φ(x + δ)
We begin with the following observation, which follows directly from calculations:
Lemma C.2. Suppose δ 0 > δ.
(i) ∆(x) ≥ 0 if and only if
1−πI
πI
≥ Ξ(x).
(ii) ∆(x) ≤ 0 if and only if
1−πI
πI
≤ Ξ(x).
Lemma C.3. Suppose δ > δ 0 .
(i) ∆(x) ≥ 0 if and only if
1−πI
πI
≤ Ξ(x).
(ii) ∆(x) ≤ 0 if and only if
1−πI
πI
≥ Ξ(x).
Lemma C.4.
(i) If δ 0 > δ, the function Ξ(·) is strictly increasing in x.
(ii) If δ > δ 0 , the function Ξ(·) is strictly decreasing in x.
Proof. Observe that
Ξ0 (x) = −
(φ(x − δ 0 ) − φ(x − δ))(Φ(x + δ 0 ) − Φ(x + δ)) − (Φ(x − δ 0 ) − Φ(x − δ))(φ(x + δ 0 ) − φ(x + δ))
.
(Φ(x + δ 0 ) − Φ(x + δ))2
We will show: δ 0 > δ implies that Ξ0 (x) > 0 for all x. Reversing the inequalities below gives the
desired result when δ > δ 0 .
Observe that Ξ0 (x) > 0 if and only if
−(φ(x − δ 0 ) − φ(x − δ))(Φ(x + δ 0 ) − Φ(x + δ)) + (Φ(x − δ 0 ) − Φ(x − δ))(φ(x + δ 0 ) − φ(x + δ)) > 0.
Since δ 0 > δ, Ξ0 (x) > 0 if and only if or if and only if
φ(x + δ) − φ(x + δ 0 )
φ(x − δ 0 ) − φ(x − δ)
>
.
Φ(x − δ 0 ) − Φ(x − δ)
Φ(x + δ) − Φ(x + δ 0 )
26
Applying Cauchy’s Mean Value Theorem, there exists c ∈ (x − δ 0 , x − δ) and c ∈ (x + δ, x + δ 0 ) such
that
φ(x − δ 0 ) − φ(x − δ)
φ0 (c)
=
Φ(x − δ 0 ) − Φ(x − δ)
φ(c)
and
φ(x + δ) − φ(x + δ 0 )
φ0 (c)
=
.
Φ(x + δ) − Φ(x + δ 0 )
φ(c)
Observe that c < c and φ is log-concave (see Lemma B.1 in Ashworth, Bueno de Mesquita and
Friedenberg, 2015). So
φ(x − δ 0 ) − φ(x − δ)
φ0 (c)
φ0 (c)
φ(x + δ) − φ(x + δ 0 )
=
>
=
,
0
Φ(x − δ ) − Φ(x − δ)
φ(c)
φ(c)
Φ(x + δ) − Φ(x + δ 0 )
implying that Ξ0 (x) > 0.
Lemma C.5. There exist some x so that ∆(x) = 0.
Proof. Observe that ∆(x) = 0 if and only if Ξ(x) =
1−πI
πI .
So it suffices to show that Ξ(·) is onto.
To do so, observe that Ξ(·) is continuous. We will show it is not bounded on R, from which it
follows that the function is onto. We show this when δ 0 > δ; a symmetric argument applies for the
reverse inequality.
Observe that, by the Cauchy Mean Value Theorem, for any given x, there exists some δ̃(x) ∈
(δ, δ 0 ) so that
Ξ(x) =
φ(x − δ̃(x))
.
φ(x + δ̃(x))
It follows from Lemma A.1 that, when x ≥ 0 (resp. x ≤ 0), Ξ(x) is greater than or equal to (resp.
less than or equal to)
φ(x − δ)
.
φ(x + δ)
Now, using the fact that the likelihood ratio is unbounded, for any given K > 0, there exists some
x(K) so that
Ξ(x(K)) ≥
φ(x(K) − δ)
≥ K.
φ(x(K) + δ)
Likewise, for any given K < 0. Thus, Ξ(·) is unbounded.
Proof of Lemma C.1. Immediate from Lemmata C.2-C.3-C.4-C.5.
We can apply Lemma C.1 to the functions Γ̃(g) = G(g − ν(ω 0 ), ι(ω)) and Γ(g; ω 0 ) = G(g −
ν(ω 0 ), ι(ω 0 )).
Corollary C.1. Suppose disasters amplify the effect of type. If ω 0 > ω, then there exists some
g(ω, ω 0 ) so that the following hold:
(i) If g ≥ g(ω, ω 0 ), then Γ̃(g) ≥ Γ(g; ω 0 ).
27
(ii) If g ≤ g(ω, ω 0 ), then Γ̃(g) ≤ Γ(g; ω 0 ).
Corollary C.2. Suppose disasters mute the effect of type. If ω 0 > ω, then there exists some g(ω, ω 0 )
so that the following hold:
(i) If g ≥ g(ω, ω 0 ), then Γ̃(g) ≤ Γ(g; ω 0 ).
(ii) If g ≤ g(ω, ω 0 ), then Γ̃(g) ≥ Γ(g; ω 0 ).
Implications for Reelection Probabilities The following Lemmata follow immediately from
Corollaries C.1-C.2, the analysis in the main text, and Proposition TK.
Lemma C.6. Suppose that disasters amplify the effect of type.
(i) If g̃ ≥ g(ω, ω 0 ) and πC ≥ πI with at least one strict inequality, then Γ(ĝ(ω), ω) > Γ(ĝ(ω 0 ), ω 0 ).
(ii) If g(ω, ω 0 ) ≥ g̃ and πI ≥ πC with at least one strict inequality, then Γ(ĝ(ω 0 ), ω 0 ) > Γ(ĝ(ω), ω).
Lemma C.7. Suppose that disasters mute the effect of type.
(i) If g̃ ≥ g(ω, ω 0 ) and πC ≥ πI with at least one strict inequality, then Γ(ĝ(ω 0 ), ω 0 ) > Γ(ĝ(ω), ω).
(ii) If g(ω, ω 0 ) ≥ g̃ and πI ≥ πC with at least one strict inequality, then Γ(ĝ(ω), ω) > Γ(ĝ(ω 0 ), ω 0 ).
Where Does g̃ Lie Relative to g(ω, ω 0 )
We begin with a preliminary result that will be of use.
Lemma C.8. There is an ω̃ ∈ (ω, ω 0 ) such that
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
1 − πI
=
.
0
0
φ(g(ω, ω ) − ν(ω ) + ι(ω̃))
πI
Proof. By Lemmata C.2-C.3,
−
Φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω 0 )) − Φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω))
1 − πI
=
.
0
0
0
0
0
Φ(g(ω, ω ) − ν(ω ) + ι(ω )) − Φ(g(ω, ω ) − ν(ω ) + ι(ω))
πI
Applying the Cauchy Mean Value Theorem to the functions given by
h− (x) ≡ Φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(x))
and h+ (x) ≡ Φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(x)),
we see that
−
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
Φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω 0 )) − Φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω))
=
.
Φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω 0 )) − Φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω))
φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω̃))
From this the claim follows.
In light of Lemma C.8, in all subsequent results, we fix ω̃ so that
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
1 − πI
=
.
0
0
φ(g(ω, ω ) − ν(ω ) + ι(ω̃))
πI
28
Lemma C.9. Fix ω 0 > ω.
(i) If πI ≥ 12 , g(ω, ω 0 ) ≤ ν(ω 0 ).
(ii) If πI ≤ 12 , g(ω, ω 0 ) ≥ ν(ω 0 ).
Proof. We show that g(ω, ω 0 ) ≤ ν(ω 0 ) if and only if πI ≥ 12 . Reversing the inequalities gives that
g(ω, ω 0 ) ≥ ν(ω 0 ) if and only if πI ≤ 12 , and so gives the desired result.
Observe that g(ω, ω 0 ) ≤ ν(ω 0 ) if and only if
1=
φ(ν(ω 0 ) − ν(ω 0 ) − ι(ω̃))
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
1 − πI
,
≥
=
0
0
0
0
φ(ν(ω ) − ν(ω ) + ι(ω̃))
φ(g(ω, ω ) − ν(ω ) + ι(ω̃))
πI
where the first equality follows from symmetry, the inequality follows from the MLRP, and the last
equality is by definition of ω̃. It follows that g(ω, ω 0 ) ≤ ν(ω 0 ) if and only if πI ≥ 21 .
Lemma C.10. Fix ω 0 > ω and let
1
2
≥ πI .
(i) Suppose that disasters amplify the effect of type and πC > 12 . Then g̃ > g(ω, ω 0 ).
(ii) Suppose that disasters mute the effect of type and
1
2
> πC . Then g(ω, ω 0 ) > g̃.
Proof. We begin with Part (i). Observe that
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
1 − πI
=
0
0
φ(g(ω, ω ) − ν(ω ) + ι(ω̃))
πI
1 − πI πC
<
πI 1 − πC
φ(ĝ(ω) − ν(ω) − ι(ω))
=
φ(ĝ(ω) − ν(ω) + ι(ω))
φ(g̃ − ν(ω 0 ) − ι(ω))
=
.
φ(g̃ − ν(ω 0 ) + ι(ω))
where the first line follows from Lemma C.8, second line follows from the fact that πC > 21 , the
third line follows from the definition of ĝ(ω), and the last line follows from the definition of g̃.
With this, to show that g̃ > g(ω, ω 0 ), it suffices to show that
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω))
≥
.
φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω̃))
φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω))
In that case, the inequalities above imply that
φ(g̃ − ν(ω 0 ) − ι(ω))
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω))
>
φ(g̃ − ν(ω 0 ) + ι(ω))
φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω))
From this, the MLRP implies that g̃ > g(ω, ω 0 ), as desired.
By Lemma C.9 and the fact that πI ≤ 12 , g(ω, ω 0 ) ≥ ν(ω 0 ). With this, the function
δ 7→
φ(g(ω, ω 0 ) − ν(ω 0 ) − δ))
φ(g(ω, ω 0 ) − ν(ω 0 ) + δ))
29
(4)
is (weakly) increasing in δ. (See Lemma A.1.) Now using the fact that disaster amplifies the effect
of type, it follows that ι(ω̃) > ι(ω). From this, Equation (4) follows.
Part (ii) involves reserving certain inequalities in the above argument. First, since
1
2
> πC ,
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
1 − πI πC
>
0
0
φ(g(ω, ω ) − ν(ω ) + ι(ω̃))
πI 1 − πC
φ(g̃ − ν(ω 0 ) − ι(ω))
=
.
φ(g̃ − ν(ω 0 ) + ι(ω))
Thus, it suffices to show that
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω))
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
≥
.
φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω))
φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω̃))
(5)
If so, the MLRP analogously implies that g(ω, ω 0 ) > g̃.
Now observe that ω̃ > ω and disaster mutes the effect of type; so ι(ω) > ι(ω̃). Recall, since
πI ≤ 21 , g(ω, ω 0 ) ≥ ν(ω 0 ). With this, the function
δ 7→
φ(g(ω, ω 0 ) − ν(ω 0 ) − δ))
φ(g(ω, ω 0 ) − ν(ω 0 ) + δ))
is (weakly) increasing in δ and so Equation (5) holds, as desired.
Several remarks are in order. First, observe that the proof of Lemma C.10 also gives the following:
Remark C.1. Fix ω 0 > ω and let
1
2
> πI .
(i) Suppose that disasters amplify the effect of type and πC ≥ 12 . Then g̃ > g(ω, ω 0 ).
(ii) Suppose that disasters mute the effect of type and
1
2
≥ πC . Then g(ω, ω 0 ) > g̃.
Moreover, reversing the argument in the proof of Lemma C.10, we get the following:
Lemma C.11. Fix ω 0 > ω and let πI > 12 .
(i) Suppose that disasters amplify the effect of type and
1
2
≥ πC . Then g(ω, ω 0 ) > g̃.
(ii) Suppose that disasters mute the effect of type and πC ≥ 21 . Then g̃ > g(ω, ω 0 ).
We will not need to make use of part (ii), as it will be redundant. We only include it for completeness.
Remark C.2. Fix ω 0 > ω and let πI ≥ 12 .
(i) Suppose that disasters amplify the effect of type and
1
2
> πC . Then g(ω, ω 0 ) > g̃.
(ii) Suppose that disasters mute the effect of type and πC > 21 . Then g̃ > g(ω, ω 0 ).
We will give a further condition under which g(ω, ω 0 ) > g̃ (resp. g(ω, ω 0 ) > g̃).
30
Lemma C.12.
(i) g̃ ≤ ν(ω 0 ) if and only if πI ≥ πC .
(ii) g̃ ≥ ν(ω 0 ) if and only if πC ≥ πI
Proof. Note that g̃ ≤ ν(ω 0 ) if and only if
1=
φ(ν(ω 0 ) − ν(ω 0 ) − ι(ω))
φ(g̃ − ν(ω 0 ) − ι(ω))
≥
,
φ(ν(ω 0 ) − ν(ω 0 ) + ι(ω))
φ(g̃ − ν(ω 0 ) + ι(ω))
where the inequality follows from the MLRP and the equality follows from symmetry. Using the
fact that
φ(g̃ − ν(ω 0 ) − ι(ω))
φ(ĝ(ω) − ν(ω) − ι(ω))
1 − πI πC
=
=
0
φ(g̃ − ν(ω ) + ι(ω))
φ(ĝ(ω) − ν(ω) + ι(ω))
πI 1 − πC
it follows that g̃ ≤ ν(ω 0 ) if and only if
1≥
1 − πI πC
πI 1 − πC
or if and only if πI ≥ πC . Reversing the inequalities gives part (ii).
Lemma C.13.
(i) If πC ≥ πI > 12 , then g̃ > g(ω, ω 0 ).
(ii) If
1
2
> πI ≥ πC , then g(ω, ω 0 ) > g̃.
Proof. We show part (i); part (i) follows by reversing inequalities: Since πC ≥ πI , g̃ ≥ ν(ω 0 ). (See
Lemma C.12(i).) Since, πI ≥ 21 , g̃ > ν(ω 0 ) > g(ω, ω 0 ). (See Lemma C.9.)
Conclusion of Proof Proposition C.1 follows from Lemmata C.6, Lemma C.10-Remark C.1,
Lemma C.11-Remark C.2, and Lemma C.13. Proposition C.2 follows from Lemmata C.7, Lemma
C.10-Remark C.1, Lemma C.13 and the following additional result.
Lemma C.14. Suppose disasters mute the effect of type and πI >
1
2
≥ πC . Then Γ(ĝ(ω), ω) >
Γ(ĝ(ω 0 ), ω 0 ).
Proof. If g(ω, ω 0 ) ≥ g̃, then Lemma C.7 says that Γ(ĝ(ω), ω) > Γ(ĝ(ω 0 ), ω 0 ). Suppose that
g̃ > g(ω, ω 0 ). We will show that g(ω, ω 0 ) > ĝ(ω 0 ). With this,
Γ(ĝ(ω), ω) = Γ̃(g̃) > Γ̃(g(ω, ω 0 )) = Γ(g(ω, ω 0 ), ω 0 ) > Γ(ĝ(ω 0 ), ω 0 ),
where the first inequality follows from the assumption that g̃ > g(ω, ω 0 ) and the MLRP, the second
equality follows by Corollary C.2, and the last inequality follows from the fact that g(ω, ω 0 ) > ĝ(ω 0 )
(that we will show) and the MLRP.
31
We now turn to show that g(ω, ω 0 ) > ĝ(ω 0 ): By Lemma C.8, there exists some ω̃ ∈ (ω, ω 0 ) so
that
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
1 − πI
.
=
φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω̃))
πI
Since disaster mutes the effect of type, ι(ω) > ι(ω̃) > ι(ω 0 ). Moreover, since πI > 12 , Lemma ??
implies that g(ω, ω 0 ) − ν(ω 0 ) < 0. Thus, applying Lemma A.1,
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω 0 ))
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω̃))
1 − πI
.
>
=
0
0
0
0
0
φ(g(ω, ω ) − ν(ω ) + ι(ω ))
φ(g(ω, ω ) − ν(ω ) + ι(ω̃))
πI
Since
1
2
≥ πC , this implies that
φ(ĝ(ω 0 ) − ν(ω 0 ) − ι(ω 0 ))
φ(g(ω, ω 0 ) − ν(ω 0 ) − ι(ω 0 ))
1 − πI πC
=
>
.
φ(g(ω, ω 0 ) − ν(ω 0 ) + ι(ω 0 ))
πI 1 − πC
φ(ĝ(ω 0 ) − ν(ω 0 ) + ι(ω 0 ))
So by the MLRP g(ω, ω 0 ) > ĝ(ω 0 ).
32
References
Abney, F Glenn and Larry B Hill. 1966. “Natural Disasters as a Political Variable: The Effect of
a Hurricane on an Urban Election.” The American Political Science Review pp. 974–981.
Achen, C.H. 1992. “Social psychology, demographic variables, and linear regression: Breaking the
iron triangle in voting research.” Political Behavior 14(3):195–211.
Achen, Christopher H. and Larry M. Bartels. 2004. “Blind Retrospection: Electoral Responses to
Drought, Flu, and Shark Attacks.” Unpublished paper.
Almendares, Nicholas and Patrick Le Bihan. 2015. “Increasing Leverage: Judicial Review as a
Democracy-Enhancing Institution.” Quarterly Journal of Political Science . Forthcoming.
Ashworth, Scott. 2005. “Reputational Dynamics and Political Careers.” Journal of Law, Economics
and Organization 21(2):441–466.
Ashworth, Scott. 2006. “Campaign Finance and Voter Welfare with Entrenched Incumbents.”
American Political Science Review 100(1):55–68.
Ashworth, Scott and Ethan Bueno de Mesquita. 2006. “Delivering the Goods: Legislative Particularism in Different Electoral and Institutional Settings.” Journal of Politics 68(1):169–179.
Ashworth, Scott and Ethan Bueno de Mesquita. 2008. “Electoral Selection, Strategic Challenger
Entry, and the Incumbency Advantage.” Journal of Politics 70(04):1006–1025.
Ashworth, Scott and Ethan Bueno de Mesquita. 2014. “Is Voter Competence Good for Voters?: Information, Rationality, and Democratic Performance.” American Political Science Review
108(3):565–587.
Ashworth, Scott, Ethan Bueno de Mesquita and Amanda Friedenberg. 2015. “Accountability and
Information in Elections.” Unpublished Manuscript.
Banks, Jeffrey S. and Rangarajan K. Sundaram. 1993. Moral Hazard and Adverse Selection in a
Model of Repeated Elections. In Political Economy: Institutions, Information, Competition, and
Representation, ed. William A. Barnett, Melvin J. Hinich and Norman J. Schfield. Cambridge:
Cambridge University Press.
Bartels, L.M. 1993. “Messages received: The political impact of media exposure.” American Political Science Review pp. 267–285.
Bechtel, Michael M. and Jens Hainmueller. 2011. “How Lasting Is Voter Gratitude? An Analysis of
the Short-and Long-Term Electoral Returns to Beneficial Policy.” American Journal of Political
Science 55(4):852–868.
33
Besley, Timothy. 2006. Principled Agents?: The Political Economy of Good Governement. Oxford:
Oxford University Press.
Besley, Timothy and Andrea Prat. 2006. “Handcuffs for the Grabbing Hand? Media Capture and
Government Accountability.” American Economic Review 96(3):720–736.
Besley, Timothy and Robin Burgess. 2002. “The Political Economy of Government Responsiveness:
Theory and Evidence from India.” Quarterly Journal of Economics 117(4):1415–1451.
Blackwell, David. 1951. The Comparison of Experiments. In Proceedings, Second Berkeley Symposium on Mathematical Statistics and Probability. Berkeley: University of California Press
pp. 93–102.
Callander, Steven and Catherine H. Wilson. 2008. “Context-Dependent Voting and Political Ambiguity.” Journal of Public Economics 92(3):565–581.
Campbell, Angus, Philip E. Converse, Warren E. Miller and Donald E. Stokes. 1960. The American
Voter. New York: John Wiley & Sons.
Canes-Wrone, Brandice, Michael C. Herron and Kenneth W. Shotts. 2001. “Leadership and Pandering: A Theory of Executive Policymaking.” American Journal of Political Science 45:532–550.
Chen, Jowei. 2013. “Voter Partisanship and the Effect of Distributive Spending on Political Participation.” American Journal of Political Science 57(1):200–217.
Coate, Stephen. 2004. “Pareto-Improving Campaign Finance Policy.” American Economic Review
94(3):628–655.
Cole, Shawn, Andrew Healy and Eric Werker. 2012. “Do voters demand responsive governments?
Evidence from Indian disaster relief.” Journal of Development Economics 97(2):167–181.
Daley, Brendan and Erik Snowberg. 2011. “Even if it is not Bribery: The Case for Campaign
Finance Reform.” Journal of Law, Economics, and Organization 27(2):301–323.
Delli Carpini, Michael X. and Scott Keeter. 1996. What Americans Know About Politics and Why
It Matters. New Haven: Yale University Press.
Diermeier, Daniel and Christopher Li. 2013. “A Behavioral Theory of Electoral Control.”. Northwestern typescript.
Downs, Anthony. 1957. An Economic Theory of Democracy. New York: Harper and Row.
Ebeid, Michael and Jonathan Rodden. 2006. “Economic geography and economic voting: Evidence
from the US states.” British Journal of Political Science 36(3):527.
Eggers, Andrew C. 2015.
“Quality-Based Explanations of Incumbency Effects.” Unpublished
Manuscript.
34
Fair, Ray C. 1978. “The Effect of Economic Events on Votes for President.” The Review of Economics and Statistics 60(2):159–173.
Fearon, James D. 1999. Electoral Accountability and the Control of Politicians: Selecting Good
Types versus Sanctioning Poor Performance. In Democracy, Accountability, and Representation,
ed. Adam Przeworski, Susan Stokes and Bernard Manin. New York: Cambridge University Press.
Fiorina, Morris P. 1981. Retrospective Voting in American National Elections. New Haven: Yale
University Press.
Fox, Justin and Matthew C. Stephenson. 2011. “Judicial Review as a Response to Political Posturing.” American Political Science Review 105(2):397–414.
Fox, Justin and Matthew C. Stephenson. 2015. “The Welfare Effects of Minority-Protective Judicial
Review.” Journal of Theoretical Politics 27(4):499–521.
Fox, Justin and Richard Van Weelden. 2010. “Partisanship and the Effectiveness of Oversight.”
Journal of Public Economics 94(9–10):684–697.
Fox, Justin and Richard Van Weelden. 2012. “Costly Transparency.” Journal of Public Economics
96(1–2):142–150.
Fox, Justin and Stuart V. Jordan. 2011. “Delegation and Accountability.” Journal of Politics
73(3):831–844.
Gasper, John T and Andrew Reeves. 2011. “Make it Rain? Retrospection and the Attentive
Electorate in the Context of Natural Disasters.” American Journal of Political Science 55(2):340–
355.
Gehlbach, Scott. 2007. “Electoral Institutions and the National Provision of Local Public Goods.”
Quarterly Journal of Political Science 2(1):5–25.
Gerber, Alan and Donald Green. 1999. “Misperceptions about Perceptual Bias.” Annual review of
political science 2(1):189–210.
Gordon, Sanford C., Gregory A. Huber and Dimitri Landa. 2007. “Challenger Entry and Voter
Learning.” American Political Science Review 101(2):303–320.
Healy, A. and N. Malhotra. 2010. “Random Events, Economic Losses, and Retrospective Voting:
Implications for Democratic Competence.” Quarterly Journal of Political Science 5(2):193–208.
Healy, A.J., N. Malhotra and C.H. Mo. 2010. “Irrelevant events affect voters’ evaluations of government performance.” Proceedings of the National Academy of Sciences 107(29):12804–12809.
Healy, Andrew and Neil Malhotra. 2009. “Myopic Voters and Natural Disaster Policy.” American
Political Science Review 103(3):387–406.
35
Huber, Gregory A., Seth J. Hill and Gabriel S. Lenz. 2012. “Sources of Bias in Retrospective
Decision Making: Experimental Evidence on Voters’ Limitations in Controlling Incumbents.”
American Political Science Review 106(04):720–741.
Kayser, Mark Andreas and Michael Peress. 2012. “Benchmarking Across Borders: Electoral Accountability and the Necessity of Comparison.” American Political Science Review 106(03):661–
684.
Key, V.O. 1966. The Responsible Electorate: Rationality in Presidential Voting, 1936–1960. Cambridge: Belknap Press of Harvard University Press.
Kinder, Donald R. and David O. Sears. 1985. “Public Opinion and Political Action.” The Handbook
of Social Psychology 2(3):659–661.
Leigh, A. 2009. “Does the World Economy Swing National Elections?” Oxford Bulletin of Economics and Statistics 71(2):163–181.
Levy, Gilat and Ronny Razin. 2015a. “Correlation Neglect, Voting Behavior, and Information
Aggregation.” American Economic Review 105(4):1634–45.
Levy, Gilat and Ronny Razin. 2015b. “Does Polarization of Opinion Lead to Polarization of Platforms?: The Case of Correlation Neglect.” Quarterly Journal of Political Science 10(3):321–355.
Lockwood, Ben. 2015. “Voter Confirmation Bias and Electoral Accountability.” University of Warwick typescript.
Lohmann, Susanne. 1998. “An Informational Rationale for the Power of Special Interests.” American Political Science Review 92(4):809–827.
Lupia, Arthur. 1994. “Shortcuts versus encyclopedias: Information and voting behavior in California insurance reform elections.” American Political Science Review pp. 63–76.
Maskin, Eric and Jean Tirole. 2004. “The Politician and the Judge: Accountability in Government.”
American Economic Review 94(4):1034–1054.
Myerson, Roger B. 2006. “Federalism and Incentives for Success of Democracy.” Quarterly Journal
of Political Science 1(1):3–23.
Ortoleva, Pietro and Erik Snowberg. 2015. “Overconfidence in Political Behavior.” American Economic Review 105(2):504–35.
Patty, John W. 2006. “Loss Aversion, Presidential Responsibility, and Midterm Congressional
Elections.” Electoral Studies 25(2):227–247.
Persson, Torsten and Guido Tabellini. 2000. Political Economics: Explaining Economic Policy.
Cambridge: MIT Press.
36
Popkin, Samuel L. 1991. The reasoning voter: Communication and persuasion in presidential
campaigns. University of Chicago Press.
Sniderman, Paul M., Richard A. Brody and Phillip E. Tetlock. 1993. Reasoning and Choice:
Explorations in Political Psychology. Cambridge University Press.
Wolfers, Justin. 2002. “Are Voters Rational?: Evidence from Gubernatorial Elections.” http:
//citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.10.8311&rep=rep1&type=pdf.
Stanford Graduate School of Business Research Paper Series #1730.
37