A CMOS contact imager for locating individual cells
advertisement

A CMOS contact imager for locating individual
cells
Honghao Ji, David Sander, Alfred Haas, Pamela A. Abshire
Department of Electrical and Computer Engineering, Institute for Systems Research
University of Maryland, College Park, Maryland 20742, USA
Email: {jhonghao, dsander, ahaas, pabshire@umd.edu}
Abstract— We describe the design of a contact imager for
applications in lab-on-a-chip systems, such as sample preparation
and manipulation and monitoring of cells. This is a challenging
task because most cells are nearly transparent, so the contrast
between the presence and absence of a cell is small. Thus
additional image processing is necessary to locate cells. To
enhance the image contrast and facilitate object recognition, the
contact imager implements on-chip one bit quantization with a
dynamic threshold that adapts to the background illumination.
The imager is capable of locating dark objects in a bright
background or bright objects in a dark background. The locations of recognized cells are generated as outputs to alleviate
computational requirements for generating control signals in
closed-loop systems.
I. I NTRODUCTION
0-7803-9390-2/06/$20.00 ©2006 IEEE
(a)
90
80
70
60
Number of pixels
Interest in single cell analysis has grown rapidly [1] due to
potential applications including scientific studies of intracellular processes, drug development, medical diagnostics, and
the development of cell-based sensors. Lab-on-a-chip systems
(LOC) are attracting increasing research attention as promising
instruments for individual cell characterization without relying
on significant laboratory infrastructure [2]–[6] . LOCs also offer the promise of multiple sensing modalities, low cost due to
minimum sample usage, high throughput, and portability. For
challenging tasks such as single cell manipulation and steering,
LOC must perform both actuation and sensing without relying
on external instruments. Whereas suitable methods exist for
microfluidic actuation of cells, including both electro-osmotic
flow (EOF) and dielectrophoresis (DEP), suitable devices are
necessary to locate cells and generate the control signals
required for steering cells onto different probing sites.
Several approaches to on-chip sensing have been reported
[5]–[7]. Optical sensing based on contact imaging using
CMOS active pixel sensor (APS) was reported in [6], [8],
which demonstrated that cells directly coupled to the chip
surface can be visualized without requiring bulky intervening
optics. The remaining challenges for closing the feedback loop
are: 1. scaling down the pixel size to match that of cells; 2.
improving the sensitivity and noise immunity to achieve real
time sensing; and 3. implementing simple signal processing so
that the location of cells can be extracted without sacrificing
resolution and speed. To address these issues, this paper
describes a CMOS image sensor designed for cell sensing in
a commercially available 0.18 µm technology. The sensor has
a pixel size of 5µm. We incorporate techniques for locating
50
40
30
20
10
0
0.45
0.5
0.55
0.6
signal level (V)
0.65
0.7
0.75
(b)
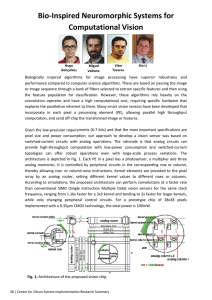
Fig. 1. (a) Image of cells acquired from a previously designed contact imager,
where locations of cells are highlighted with circles, and (b) histogram of the
signal distribution of (a).
cells into the sensor architecture so that post-capture image
processing is unnecessary and only information about cell
locations is collected, while retaining the resolution and speed
of the image sensor.
The rest of this paper is organized as follows: section
II introduces the algorithm used to improve sensitivity and
locate multiple objects; section III describes the design in
detail including architecture design, pixel design, and adaptive
3357
ISCAS 2006
(a)
(b)
(c)
Fig. 2. The image in 1(a) is quantized using (a) mean, (b) median signal
levels, and (c) Vavg .
threshold; section IV presents simulation results; and section
V summarizes this work and outlines future directions.
II. C ELL LOCATION TECHNIQUE
We briefly review existing image processing techniques potentially useful for locating cells. The winners-take-all (WTA)
method identifies the strongest signal or signals out of an
ensemble [9]. It is not suitable for our application because
the number of cells is not known a priori. Multiple cells
could be present in one row or column, and their images
may correspond to different signal levels. In [10], Burns et al.
described a binary object location system (OLS) and proposed
a cumulative cross section (CCS) readout system for object
location. Both systems rely on comparing the photovoltages
of each pixel to a global threshold to generate two 1 − D
data arrays. Although CCS can identify the number of pixels
in each row with their photovoltages less than a threshold,
it doesn’t provide the address for every identified pixel. In
addition, comparison between photovoltages and the global
threshold are performed in pixel, so it can detect either
dark objects in light backgrounds or bright objects in dark
backgrounds, but not both. It also results in large pixel size.
In order to locate multiple cells which have sizes comparable to the size of a pixel, we modified OLS by performing
a global one-bit quantization to generate a binary image
where either ones or zeros are identified as objects based
on the contrast between cells and the background. Figure 1
shows a previously acquired image of cells coupled to the
sensor surface along with the amplitude statistics of its analog
intensity signals. Since cells are sparingly distributed on the
chip surface, most pixels have signals corresponding to the
background illumination level. As shown in Figure 1(b), most
signals cluster around 0.67 V in a nearly Gaussian distribution,
which arises from the differences in gains of different pixels
and random noise. A few signals scatter between 0.45 V
and 0.6 V , which correspond to the presence of cells in the
image. These signals would be another Gaussian distribution
centered somewhere between 0.45 V and 0.6 V , if there were
enough cells present in the image. The poor contrast between
photovoltages due to the absence and presence of nearly
transparent cells can be significantly enhanced if we transform
the original image into a binary one by one-bit quantization.
Additionally, variations in background light level will cause
this distribution to shift, so it is desirable to dynamically
generate the threshold level on chip. Intuitively, the threshold
level for one-bit quantization should be the value where the
two Gaussian distributions start overlapping. When there are
only a few cells present as in Figure 1, the threshold should
be a value close to the left edge of the Gaussian distribution
in Figure 1(b) in order to locate the objects and suppress
background noise. To ease computational burden on chip,
the global threshold is taken to be the average value Vavg
of the maximum and minimum photovoltages assuming that
the two Gaussian distributions have the same variance. Figure
2 shows the quantized version of Figure 1(a) using Vavg as
the threshold. For comparison, binary images of Figure 1(a)
quantized using mean and median signal levels are also shown.
The figure illustrates that choosing the correct threshold is
critical for removing the noise and correctly locating cells.
III. S YSTEM D ESIGN
A. Chip architecture
The block diagram of the image sensor is shown in Figure
3. Signal processing circuitry is separate from the sensor
array and readout circuitry. Therefore, the design of processing
circuitry can be optimized without sacrificing the pixel size,
scalability of the pixel array, or speed. The sensor array
consists of 256 × 256 pixels, row decoder, column decoder,
and column-wise readout circuits. The inputs for each decoder
can be generated from on-chip counters for scanning operation,
as shown in Figure 3, or supplied from off-chip for random
access (not shown). The processing unit includes a threshold
generator, comparator, and object address generator. Analog
photovoltage generated from each pixel is read out from the
pixel array and compared to the threshold computed using
the intensity data of the previous frame. The output of the
comparator is one if the photovoltage is larger than the threshold, and zero otherwise. A control signal determines whether
objects are bright or dark compared to the background. For
bright objects (such as cells labeled with fluorescent probes),
the quantized outputs directly gate a “Clk addressout” clock
signal to generate the clock for two sets of shift registers,
which have the row address and column address of the selected
pixel as their inputs respectively. The address of an identified
3358
cell is captured by the shift registers and serially read out of
chip. For dark objects (such as stained cells), the quantized
outputs are inverted before gating the “Clk addressout” clock.
To eliminate false alarms when there are no cell s on the chip
surface, the threshold generator produces a “No object” signal.
When “No object” is on, both address-capturing shift registers
are disabled.
Row sel
Rst
V tune
Background_cont
Clk_addressout
Vth generator
256 256
No_objects
Column wise
readout circuit
Col. ADC
Counter
Col. Decoder
8 shift 8
reg.
Col bus
V sig
V rst
8
Clk2
Clk1
Start
APS array
Vth
Row Decoder
Counter
Vg
Fig. 4.
The schematic of a modified pixel circuit.
D out
Col add.
Vtune
8 shift 8
reg.
Row add.
No_object
V shifter
Vsig
SWmax
Fig. 3. The image sensor architecture, where the processing unit is enlosed
in the dashed box.
Vmax
Clk_eval
Ø2
Vavg
Ø2
B. Pixel array
Ø1
C1
C3
Vrst
We used a modified pixel structure as shown in Figure 4
to enhance performance. One additional transistor is added to
a conventional three-transistor one-photodiode APS pixel. The
pixel has an area of 5µm×5µm, with a fill factor of 31%. The
pixel can operate in different modes selected by control signals
for either reset noise suppression or dark current reduction. A
description of the pixel design considerations and its modes
of operation can be found in [11].
Ø1
Vdd
C2
Ø1
C4
Ø2
SWmin
C. Threshold generator
A diagram of the threshold generator is shown in Figure 5.
The reset voltage Vrst and signal voltage Vsig after integration
for each pixel are fed into both Vmax and Vmin detectors. If
Vsig is higher than the previous stored Vmax , corresponding
to a smaller photovoltage (Vrst − Vsig ), it is stored as the
new Vmax . Similarly, if it’s less than the previously stored
Vmin , it will be stored as new Vmin . To prevent difficulty in
closing SWmax (SWmin ) due to the coupling through Cgs of
SWmax (Cgd of SWmin ) and disturbance of the stored Vmax
(Vmin ) due to uncertainty in the comparator’s output when the
stored voltage approaches its new value, one additional switch
is added between SWmax (SWmin ) and the storage capacitor
C1 (C2). This switch is controlled by a separate clock signal
“Clk eval”. After reading out each frame, the new Vmax
and Vmin are passed to the next buffer stage by closing the
switches controlled by Φ2. After switches controlled by clock
Fig. 5.
Threshold voltage Vavg generator.
Φ2 are open, clock Φ1 closes the switch connecting C3 and
C4 to generate a new threshold. Meanwhile Vmax and Vmin
are reset to 0V and 3.3V respectively. A voltage shifter, as
shown in Figure 6, is also included in the threshold generator
to generate a voltage of Vbg = Vmax − ∆V where ∆V
can be adjusted by a control signal Vtune to suppress errors
due to noise-induced non-uniformity. If the threshold is larger
than Vbg , i.e. the average photovoltage Vavg is less than the
smallest photovoltage plus ∆V , “N o object” becomes zero
and disables the address capturing shift registers. Thus false
alarms due to the absence of objects can be eliminated.
The finished chip layout is shown in Figure 7.
3359
3
Vtune
2.5
output of Vmax detector
input signal
output of Vmin detector
Vdd
Vin
Signals (V)
2
Vout
1.5
1
0.5
0
0
0.2
0.4
0.6
Time (sec)
Fig. 6.
Schematic of voltage shifter.
0.8
1
−3
x 10
Fig. 8. The simulation results of Vmax and Vmin detectors with a sinusoidal
signal as input. The input signal has a maximum value of 2.9 V and minimum
value of 1.1V.
V. C ONCLUSION
An image processing technique for locating multiple cells
along with its physical implementation has been presented.
A 256 × 256 APS array with pixel size of 5µm × 5µm was
designed to achieve adequate resolution for contact imaging
of individual cells. Addresses of identified cells are generated
as outputs to facilitate the generation of control signals for
microfluidic actuation. We plan to integrate this image sensor
with microfluidic actuation in a closed-loop feedback system
to form an autonomous lab-on-a-chip (LOC) system.
R EFERENCES
Fig. 7.
Chip layout. The size is 3 mm × 3 mm including the padframe.
IV. S IMULATION RESULTS AND DISCUSSION
The implementation of the technique for identifying multiple cells described above was fully simulated using Spectre.
The simulation results of every block meet their expected
functionalities. To avoid saturation, the integration time and
the frame rate can be controlled externally through the decoders according to the sensitivity of the fabricated sensor
and illumination level. The threshold generator is the key
component for successfully tracking the cells. Figure 8 shows
simulation results for both Vmax and Vmin detectors. Within
the expected output range (1.1 V to 2.9 V), both Vmax and
Vmin detectors store the maximum and minimum values with
an offset less than 7mV . The chip will be fabricated in a
commercially available 0.18 µm one-poly, six-metal CMOS
process.
[1] Helene Andersson and Albert van den Berg, “Microtechnologies and
nanotechnologies for single-cell analysis,” Curr. Opin. Biotechnol., vol.
15, no. 1, pp. 44-49, 2004
[2] Helene Andersson and Albert van den Berg, “Microfluidic devices for
cellomics: a review,” Sens. Actuators, B, vol. 92, no. 3, pp. 315-325,
2003
[3] Darwin R. Reyes, Dimitri Iossifidis, Pierre-Alain Auroux, and Andreas
Manz, “Micro total analysis systems. 1. introduction, theory, and technology,” Anal. Chem., vol. 74, no. 12, pp.2623-2636, 2002
[4] Pierre-Alain Auroux, Dimitri Iossifidis, Darwin R. Reyes, and Andreas
Manz, “Micro total analysis systems. 2. analytical standard operations
and applications,” Anal. Chem., vol. 74, no. 12, pp. 2637-2652, 2002
[5] G. Medoro, N. Manaresi, A. Leonardi, L. Altomare, Tartagni, and R.
Guerrieri, “A lab-on-a-chip for cell detection and manipulation,” IEEE
Sens. J., vol.3, no. 3, pp.317-325, 2003
[6] N. Manaresi, A. Romani, G. Medoro, L. Altomare, A. Leonardi, M.
Tartagni, and R. Guerrieri, “A CMOS chip for individual cell manipulation
and detection,” IEEE J. Solid-st. Circ., vol. 38, no. 12, pp. 297-2305, Dec.
2003
[7] Yehya Ghallab and Wael Badawy, ”A novel CMOS lab-on-a-chip for
biomedical applications,” Proc. of ISCAS, pp.1346-1349, 2005
[8] Honghao Ji, Mario Urdaneta, Elisabeth Smela, and Pamela Abshire,
“CMOS contact imager for monitoring cultured cells,” Proc. of ISCAS,
pp. 3491-3494, 2005
[9] A. Fisher, D. Turchin, and O. Yadid-Pecht, “An APS with 2-D winnertake-all selection employing adaptive spatial filtering and false alarm
reduction,” IEEE Trans. Electron Dev., vol. 50, no. 1, pp. 159-165, 2003
[10] R.D. Burns, J. Shah, C. Hong, S. Pepić, J. S. Lee, r. I. Hornsey, and P.
Thomas, “Object location and centroiding techniques with CMOS active
pixel sensor,” IEEE Trans. Electron Dev., vol. 50, no. 12, pp. 2369-2377,
2003
[11] Honghao Ji and Pamela Abshire, ”A CMOS image sensor for low light
applications,” Proc. of ISCAS 2006 (Vision sensors session)
3360