Swarms in Three Dimensions E.W. Justh , P.S. Krishnaprasad Institute for Systems Research,
advertisement

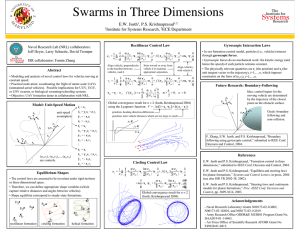
Swarms in Three Dimensions E.W. Justh1, P.S. Krishnaprasad1,2 1Institute for Systems Research, 2ECE Department Rectilinear Control Law Naval Research Lab (NRL) collaborators: Jeff Heyer, Larry Schuette, David Tremper ⎞ ⎛ r jk ⎞ 1 ⎡ ⎛ r jk ⋅x j ⎟⎜ ⋅ y j ⎟ + f (| r jk ⎢ −η ⎜⎜ ∑ ⎟ ⎜ ⎟ n k ≠ j ⎢⎣ ⎝ | r jk | ⎠ ⎝ | r jk | ⎠ uj = ISR collaborator: Fumin Zhang Align vehicle j perpendicular to the baseline between vehicles j and k. Abstract • Modeling and analysis of novel control laws for vehicles moving at constant speed. • Practical motivation: coordinating the flight of meter-scale UAVs (unmanned aerial vehicles). Possible implications for UUV, UGV, or USV swarms, or biological swarming/schooling systems. • Objective: UAV formation demo in collaboration with NRL. Model: Unit-Speed Motion r1 = x1 z2 y2 x2 z1 r2 xn yn x 1 = y1u1 + z1v1 y 1 = −x1u1 x1 z 1 = −x1v1 r2 = x 2 r1 $ zn y1 unit-speed assumption Steer toward or away from vehicle k to maintain appropriate separation. ⎞⎛ r ⎞ 1 ⎡ ⎛ r jk ∑ ⎢−η ⎜ ⋅ x j ⎟⎟ ⎜⎜ | rjk | ⋅ z j ⎟⎟ + f (| r jk n k ≠ j ⎣⎢ ⎜⎝ | r jk | ⎠ ⎝ jk ⎠ r jk = rk − r j , ⎤ ⎛ r jk ⎞ |) ⎜ ⋅ y + µ xk ⋅ y j ⎥ ⎜ | r jk | j ⎟⎟ ⎥⎦ ⎝ ⎠ ⎡ ⎛ r f (| r jk |) = α ⎢1 − ⎜ o ⎢ ⎜⎝ | r jk ⎣ ⎞ ⎟ | ⎟⎠ 2 Align vehicle j with vehicle k. ⎤ ⎛ r jk ⎞ |) ⎜ ⋅ z + µ xk ⋅ z j ⎥ ⎜ | r jk | j ⎟⎟ ⎝ ⎠ ⎦⎥ ⎤ ⎥ , µ > η > 0, α > 0. 2 ⎥ ⎦ Global convergence result for n = 2 (Justh, Krishnaprasad 2004) using the Lyapunov function: V = − ln (1 + x 2 ⋅ x1 ) + h(| r2 − r1 |) penalizes heading-direction differences penalizes inter-vehicle distances which are too large or small (u1,v1), (u2,v2),..., (un,vn) are controls. circling formation x2 z1 r2 y1 x1 Goals: boundary following and non-collision. References Circling Control Law uj = helical formation z2 y2 F. Zhang, E.W. Justh, and P.S. Krishnaprasad, “Boundary following using gyroscopic control,” submitted to IEEE Conf. Decision and Control, 2004. y n = − x n un z n = − x n vn 3 Idea: control inputs for the moving vehicle are determined by the trajectory of the closest point on the obstacle surface. ρ # rn = x n x n = y nun + z n vn • The control laws are assumed to be invariant under rigid motions in three-dimensional space. • Therefore, we can define appropriate shape variables (which capture relative distances and angles between vehicles). • Shape equilibria correspond to steady-state formations. g4 g1 g2 g4 g4 g2 g5 g1 g3 g5 g1 g2 g3 g5 g Future Research: Boundary-Following f (ρ) x 2 = y 2u2 + z 2 v2 y 2 = −x 2u2 Equilibrium Shapes • In our formation control model, particles (i.e., vehicles) interact through gyroscopic forces. • Gyroscopic forces do no mechanical work: the kinetic energy (and hence the speed) of each particle remains constant. • The physically relevant quantities are rj (the position) and xj (the unit tangent vector to the trajectory), j=1,…,n, which imposes constraints on the form of (uj,vj), j=1,…,n. r1 h( ρ ) z 2 = − x 2 v2 rn rectilinear formation vj = Gyroscopic Interaction Laws ⎞⎛ r ⎞ 1 ⎪⎧ ⎛ r jk ∑ ⎨−η ⎜ ⋅ x j ⎟⎟ ⎜⎜ | r jk | ⋅ y j ⎟⎟ + f (| rjk n k ≠ j ⎩⎪ ⎜⎝ | r jk | ⎠ ⎝ jk ⎠ ⎛ r ⎞ |) ⎜ jk ⋅ y j ⎟ ⎜ | r jk | ⎟ ⎝ ⎠ ⎡ ⎛ r ⎞⎛ r ⎞ ⎤ ⎪⎫ + µ ⎢ − x k ⋅ y j + 2 ⎜ jk ⋅ x k ⎟ ⎜ jk ⋅ y j ⎟ ⎥ ⎬ ⎜|r | ⎟⎜ | r | ⎟⎥ ⎝ jk ⎠ ⎝ jk ⎠ ⎦ ⎭⎪ ⎣⎢ Global convergence result for n = 2 (Justh, Krishnaprasad 2004). E.W. Justh and P.S. Krishnaprasad, “Formation control in three dimensions,” submitted to IEEE Conf. Decision and Control, 2004. E.W. Justh and P.S. Krishnaprasad, “Equilibria and steering laws for planar formations,” Systems and Control Letters, in press, 2004 (see also ISR TR 2002-38, 2002). E.W. Justh and P.S. Krishnaprasad, “Steering laws and continuum models for planar formations,” Proc. IEEE Conf. Decision and Control, pp. 3609-3614, 2003. Acknowledgements - Naval Research Laboratory Grants N00173-02-1G002, N00173-03-1G001, and N00173-03-1G019. - Army Research Office ODDR&E MURI01 Program Grant No. DAAD19-01-1-0465. - Air Force Office of Scientific Research AFOSR Grant No. F49620-01-0415.