Swarms in Three Dimensions E.W. Justh , P.S. Krishnaprasad Institute for Systems Research,
advertisement

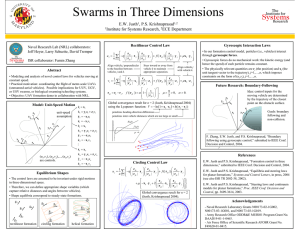
Swarms in Three Dimensions E.W. Justh1, P.S. Krishnaprasad1,2 for Systems Research, 2ECE Department 1Institute Rectilinear Control Law Naval Research Lab (NRL) collaborators: Jeff Heyer, Larry Schuette, David Tremper öæ r jk ö 1 é æ r jk ×x j ÷ç ×y j ÷+ f (| r jk ê- h çç å ÷ç ÷ n k ¹ j êë è | r jk | øè | r jk | ø uj = ISR collaborator: Fumin Zhang Align vehicle j perpendicular to the baseline between vehicles j and k. Abstract • Modeling and analysis of novel control laws for vehicles moving at constant speed. • Practical motivation: coordinating the flight of meter-scale UAVs (unmanned aerial vehicles). Possible implications for UUV, UGV, or USV swarms, or biological swarming/schooling systems. • Objective: UAV formation demo in collaboration with NRL. Model: Unit-Speed Motion r1 = x1 z2 y2 x2 z1 r2 xn yn x 1 = y1u1 + z1v1 y 1 = - x1u1 x1 z 1 = - x1v1 r2 = x 2 r1 $ zn y1 unit-speed assumption vj = r jk = rk - r j , ù æ r jk ö ×y + mx k ×y j ú |) ç ç | r jk | j ÷ ÷ úû è ø Steer toward or away from vehicle k to maintain appropriate separation. öæ r jk ö 1 é æ r jk ×z + f (| r jk å ê- h ç ×x j ÷ç ÷ç | r jk | j ÷ ÷ n k ¹ j ëê çè | r jk | øè ø é f (| r jk |) = a ê1 ê ë æ ro çç è | r jk 2 ö ÷ |÷ ø Gyroscopic Interaction Laws Align vehicle j with vehicle k. ù æ r jk ö ×z + mx k ×z j ú |) ç ç | r jk | j ÷ ÷ ú è ø û (u1,v1), (u2,v2),..., (un,vn) are controls. Global convergence result for n = 2 (Justh, Krishnaprasad 2004) using the Lyapunov function: V = - ln (1 + x 2 ×x1 )+ h(| r2 - r1 |) penalizes heading-direction differences z2 y2 x2 z1 r2 y1 x1 r1 h( r) Goals: boundary following and non-collision. f ( r) r F. Zhang, E.W. Justh, and P.S. Krishnaprasad, “Boundary following using gyroscopic control,” submitted to IEEE Conf. Decision and Control, 2004. # rn = x n x n = y nun + z n vn References y n = - x nun z n = - x n vn • The control laws are assumed to be invariant under rigid motions in three-dimensional space. • Therefore, we can define appropriate shape variables (which capture relative distances and angles between vehicles). • Shape equilibria correspond to steady-state formations. g4 g1 g2 g4 g4 g2 g5 g1 g3 g5 g1 g2 g3 g5 g3 rectilinear formation circling formation helical formation Idea: control inputs for the moving vehicle are determined by the trajectory of the closest point on the obstacle surface. penalizes inter-vehicle distances which are too large or small x 2 = y 2u2 + z 2 v2 y 2 = - x 2u2 Equilibrium Shapes Future Research: Boundary-Following ù ú, m > h > 0, a > 0. 2 ú û z 2 = - x 2 v2 rn • In our formation control model, particles (i.e., vehicles) interact through gyroscopic forces. • Gyroscopic forces do no mechanical work: the kinetic energy (and hence the speed) of each particle remains constant. • The physically relevant quantities are rj (the position) and xj (the unit tangent vector to the trajectory), j=1,…,n, which imposes constraints on the form of (uj,vj), j=1,…,n. E.W. Justh and P.S. Krishnaprasad, “Formation control in three dimensions,” submitted to IEEE Conf. Decision and Control, 2004. Circling Control Law uj = öæ r jk ö 1 ìï æ r jk ×y + f (| r jk å í - h ç ×x j ÷ç ÷ç | r jk | j ÷ ÷ n k ¹ j îï çè | r jk | øè ø ær ö |) ç jk ×y j ÷ ç | r jk | ÷ è ø é ær öæ r öùü ï + m ê- x k ×y j + 2 ç jk ×x k ÷ç jk ×y j ÷úý ç ÷ç ÷ | | | | r r úþï è jk øè jk øû ëê Global convergence result for n = 2 (Justh, Krishnaprasad 2004). E.W. Justh and P.S. Krishnaprasad, “Equilibria and steering laws for planar formations,” Systems and Control Letters, in press, 2004 (see also ISR TR 2002-38, 2002). E.W. Justh and P.S. Krishnaprasad, “Steering laws and continuum models for planar formations,” Proc. IEEE Conf. Decision and Control, pp. 3609-3614, 2003. Acknowledgements - Naval Research Laboratory Grants N00173-02-1G002, N00173-03-1G001, and N00173-03-1G019. - Army Research Office ODDR&E MURI01 Program Grant No. DAAD19-01-1-0465. - Air Force Office of Scientific Research AFOSR Grant No. F49620-01-0415.