Introduction
advertisement

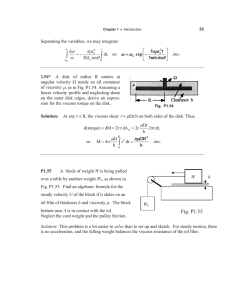
A Five-Phase Brushless DC-Machine Direct Drive System A Five-Phase Brushless DC-Machine Direct Drive System M. Godoy Simões, Colorado School of Mines, Golden, Colorado, USA P. Vieira Jr., Federal University of Pará Belém, Brazil Abstract The paper describes the design, analysis, simulation, modeling and control implementation of a high-torque, low-speed, multiphase, permanent magnet, brushless dc machine. The main focus is on issues regarding the high-level modeling, comprised of a transient model, in conjunction with corresponding experimental evaluation. The general assumption of ideal rectangular current waveforms for brushless-dc machines is not encountered in practice; the existing distortions can be modeled by incorporating mutual inductance and armature reaction in order to avoid erroneous control strategy development. Analyses are made to put together modeling efforts with the expected behavior so as to build a model of the expected behavior so realistic simulation results can be verified. Coherent and consistent results were observed by comparing simulation and experimentation. A digital signal processing (DSP) system control was developed to implement the strategies that corroborate the work. Introduction The majority of electrical drive systems are three-phase systems. Recently some quasi-four-phase systems employing neutral leg also have been used for harmonic optimization and fault-tolerant drives. Three-phase drive systems have been widely used for years because of the availability of such machines, their inverters, modeling and control. However, polyphase schemes have been used in the past in drive systems where an induction machine with asymmetric windings has three-phase sets advanced by 30 degrees for twelve-step industrial applications. Such multiphase drives are likely to be limited to specialized applications where high performance and reliability are required (such as EV, HEV, aerospace, ship propulsion and high power applications) and when cost requirements are not so oppressive when compared to the overall environment. The recent literature indicates several advantages for using a multiphase multi-pole electrical machine in hub-wheel systems – high-torque low-speed motors can directly drive systems, avoiding mechanical losses incurred by the clutch, reduction and differential gear during power transmission from the motor to the wheels. This work presents the design, analysis, simulation, modeling and control implementation of a high-torque, lowspeed, multiphase, permanent magnet, brushless dc-machine. The paper focuses on issues regarding the high-level modeling, comprised of a transient model, in conjunction with corresponding experimental evaluation. Analyses were made to put together the modeling efforts with the expected behavior in order to have realistic simulation results verified by the experimental setup; comprehensive experimental results corroborate the work. DSP microcontroller offers the advantages of a single chip system combined with the power of a high performance DSP core and is actually the ideal device to implement the complex control laws required for high performance drives where a full set of functions required for ac drive control systems include transfer functions, filter algorithms, and some special ac motor control functions. Loop compensator and matrix vector multiplication that is required for state space control and generation can be implemented within some hundreds of microseconds. The second important issue about the high cost of multiphase drives can be properly addressed with the support of modeling multi-machine multi-converter systems (MMS) [1]. The MMS formalism is used to build a representation of a system where the power structure can have several couplings (electrical, magnetic and mechanical); there are four conversion structures, namely mono-structures, multi-structures, upstream and downstream. Within such a MMS analysis and modeling approach several applications have been described. A five-leg inverter has been shown to be able to supply two three-phase induction motors; such power structure allows reduced global cost and weight. Other structures allow a back-to-back connection of a generator (or a three-phase grid) with a three-phase machine with just one fivephase inverter [2]. The torque control of electric vehicles with separated wheel drives has been recently addressed under the MMS approach [3, 4] and a polyphase cartesian vector approach to control polyphase machines demonstrated that a single inverter with (2N + 1) phases can independently control (N) ac-machines connected in series with appropriate phase swapping [5]. Such recent MMS initiatives have been driving forces for further research and development of multiphase machines as the one presented in this paper. Five-phase brusheless dc-machine A high number of phases yield a smaller magnetic yoke and decreased volume and weight. However, the number of poles is restricted physically to the size of the permanent magnets and the rotor diameter. Multiple phase arrangement for electrical machines minimizes torque ripple, increases power density and improves fault-tolerance in respect to open-circuit legs. The criticism against a higher number of phases is because of its more complex inverter control scheme and higher cost. Control complexity is easily managed with the new generation of DSP controllers targeted to high performance motion systems. A EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 Analysis and modeling A radial flux-based motor was designed to be applied as an inwheel, high-torque, and low-speed motor direct drive system [6]. The machine is composed of a rotor with 275 mm of external diameter. Magnets are bonded on the internal surface making up the twelve pole structure [6, 7], where five phases were accommodated within 60 slots (12 coils for each phase) in a double-layer lap winding construction. With a built-in shaft optical sensor, the motor phase windings are excited sequentially, the optical position system addresses a lookup table, a phase is turned on at the same 15 M. Godoy Simões, P. Vieira Jr. Fig. 1: Five-phase brushless machine control block diagram. time that one coil leaves the polar section. The permanent magnet flux produces a trapezoidal back-EMF and the currents must be commanded to be ideally in phase with the back-EMF voltages. Table 1 presents the nominal parameters for the machine under consideration. A Motorola 56824 embedded board is integrated into the feedback control system as indicated in Fig. 1. a) b) Fig. 2: Linear commutated equivalent circuits, (a) Forced excitation, (b) Free-wheeling path Table I: Motor Parameters External diameter: Axial length: Power rating: Poles: Phases: Nominal voltage: Nominal current: Rated speed: Rated torque: 16 275 mm 130 mm 3.2 HP 12 5 140 V 7.5 A 750 rpm 30 Nm The DSP board was specially designed with a dual-port memory with shared addresses with the PC host, easing the development and high-speed communication needs. The torque control loop is described later. Detailed simulation studies have been performed initially in order to fully develop the control strategy. The concept of commutated linear equivalent circuits was applied to the machine, i.e., every 72 electrical degrees two equivalent circuits valid for forced and freewheeling conditions were devised. Figs. 2 (a) and (b) show the first driving stage where transistors Q1, Q3, Q2 and Q4 are on, impressing excitation for phases A, B, D and E, while there is still current flowing on the machine coils due to the last driving stage as indicated by the free-wheeling path. The equations (1) to (7) represent this condition. Such an approach is applied subsequently to all the phases. Therefore, the modeling was extended as indicated by the equivalent circuits per stage in Fig. 3. A mechanism of switching all the equations, saving initial conditions for next circuit and retrieving the currents from all those difference equations was implemented in Simulink/Matlab. Even though such a modeling approach has been used in the literature [8-11], other important issues were found for accurate machine mathematical modeling: the mutual inductance between phases and the armature reaction because of the distortion that occurs in existing brushless dc-machines [6, 7]. The mutual inductance can be considered by observing how the air-gap flux is composed by all five contributions and building up the inductance matrix (through experimental parameter identification of self and mutual inductance parameters). Equation (8) shows that currents have been identified as state variables. Equation (8) also shows that the inductance matrix needs to be inverted and there is one phase with null current every time, i.e. the five-phase system is reduced to a fourth-order system because every 36 electrical degrees there are only four phases conducting, EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 A Five-Phase Brushless DC-Machine Direct Drive System Fig. 3: Equivalent circuits for each commutation state while a fifth phase is kept off. For dynamic simulation the inductance matrix must be numerically inverted each simulation stepsize and a Cholesky decomposition helped the matrix to be expressed analytically permitting the dynamic simulation. The same fourth-order system is equivalent every 36 electrical degrees, as long as the equations have their variables redefined in accordance with the flowing currents and the four integrator initial conditions introduced from the previous stage, i.e., each stage has its own current matrix, back-EMF matrix, mutual matrix, transistor and diode-drop matrix. As described in [6] and [7], the incorporation of armature reaction in the simulation studies is absolutely necessary in order to have a more realistic system response. From the energy-modeling point of view, the induced voltage due to the changing electromagnetic EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 stored energy (back-EMF) delivers mechanical energy. Thus, the torque for the five-phase BPM machine has to account for the airgap flux distortion by the armature reaction as shown in Equation (9). The actual experimental evaluation of air-gap back-EMF was used for torque calculation. Equation (9) needs two lookup tables, a trapezoidal normalized function (Γω) due to the permanent magnet induced motional voltage, and a triangular normalized function (Λc) for the armature reaction voltage. Therefore, two experimental tests for back-EMF were required – open-circuit back-EMF in the whole speed operating range and full-loaded shaft machine in order to obtain Γω and Λc. The experimental lookup tables for obtain Γω and Λc can easily incorporate the effect of rotor position shift in respect to the actual value, a problem that arises in real world. The drive model is given with the following equations: 17 M. Godoy Simões, P. Vieira Jr. ( ) ( ) dia 1 = −4 Ria − 3ea′ + eb′ + ed′ + ee′ + 2Vs − 4Vq dt 4L dib 1 = −4 Rib + ea′ − 3eb′ + ed′ + ee′ + 2Vs − 4Vq 4L dt (1) ( ) ( ) Lae = M cos 72 o = Lea = M cos 288o = M1 – mutual inductance between phase a and e (2) ( ) ( ) Lbc = M cos 288o = Lcb = M cos 72 o = M1 – mutual inductance between phase b and c ( did 1 = −4 Rid + ea′ + eb′ − 3ed′ + ee′ − 2Vs + 4Vq 4L dt ( die 1 = −4 Rie + ea′ + eb′ + ed′ − 3ee′ − 2Vs + 4Vq dt 4 L ) ) (3) ( ) ( ) Lbd = M cos 216 o = Ldb = M cos 144 o = M2 – mutual inductance between phase b and d (4) ( ) ( ) Lbe = M cos 144 o = Lbe = M cos 216 o = M2 dia 1 2 = − ea − Ria dt L 3 (5) did 1 1 = ea − Rid dt L3 (6) die 1 1 = ea − Rie dt L3 (7) – mutual inductance between phase b and e ( ) ( ) Lcd = M cos 288o = Ldc = M cos 72 o = M1 – mutual inductance between phase a and d ( ) ( ) Lce = M cos 216 o = Lec = M cos 144 o = M2 – mutual inductance between phase e and c where: ea′ = ea + Lab eb′ = eb + Lba dib di di di + Lac c + Lad d + Lae e dt dt dt dt dia di di di + Lbc c + Lbd d + Lbe e dt dt dt dt ( ) ( ) Lde = M cos 288o = Led = M cos 72 o = M1 – mutual inductance between phase d and e ea, eb, ec, ed and ie – back-EMF developed by phases a, b, c, d and e respectively. di di di di ec′ = ec + Lca a + Lcb b + Lcd d + Lce e dt dt dt dt ed′ = ed + Lda ee′ = ee + Lea dia di di di + Lbd b + Ldc d + Lde e dt dt dt dt dia di di di + Leb b + Lec c + Led d dt dt dt dt ( ) Lab = M cos 288o = Lba = M cos 72 o = M1 – mutual inductance between phase a and b ( ) ( ) Lac = M cos 218o = Lca = M cos 144 o = M2 – mutual inductance between phase a and c ( ) ( ) Lad = M cos 144 o = Lda = M cos 216 o = M2 – mutual inductance between phase a and d 18 Lls M R Vs Vq – leakage inductance – air-gap inductance – stator resistance – inverter voltage supply – diode and transistor voltage drop −1 – self inductance of phase a, b, c, d and e respectively. ) – current in phases a, b, c, d and e respectively. M d Iabde ] = [ I ] − ⋅ [ Mabde ] ⋅ [ 4L dt Laa = Lbb = Lcc = Ldd = Lee = Lls + M ( ia, ib, ic, id and ie −3 1 1 1 1 −3 1 1 1 ⋅ [ E ] + Vs Vq − R I ⋅ + 4 [ ] [ ] abde 1 1 −3 1 abde 4L 1 1 1 −3 [ (8) ] where : ia i [ Iabde ] = ib d ie – is the current vector for each phase for stage I EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 A Five-Phase Brushless DC-Machine Direct Drive System Fig. 4: System modeling approach ea e [ Eabde ] = eb d e e – is the back-EMF vector for each phase for stage I a) [ Mabde ] = (2 M1 + M2 ) ( −2 M1 + M2 ) (2 M1 − 3M2 ) ( −2 M1 + M2 ) (−3M1 + 2 M2 ) ( M1 + 2 M2 ) ( M1 − 2 M2 ) ( M1 − 2 M2 ) ( M1 − 2 M2 ) (−2 M1 + M2 ) ( M1 − 2 M2 ) (2 M1 − 3M2 ) ( M1 + 2 M2 ) (−2 M1 + M2 ) (−3M1 + 2 M2 ) (2 M1 + M2 ) – is the inductance matrix for state I. 0 0 0 −4 R 0 −4 R 0 0 [ R] = 0 0 −4 R 0 0 0 −4 R 0 b) – is the resistance matrix 1 0 [I] = 0 0 0 0 0 1 – is the identity matrix 0 1 0 0 0 0 1 0 c) [Vs Vq] – is the voltage matrix for transistors and diodes The torque equation is n K v ω (t ) Γ ω t − 2 π + 5 1 Te = in (t ) (9) ω (t ) n = 0 n Ka in (t ) Λc t − 2 π 5 4 ∑ EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 Fig. 5: Simulation study of displacement effect of position encoder in electrical degrees for fixed PWM duty-cycle; (a) 3 electrical degrees displacement, (b) 12 electrical degrees displacement, (c) 18 electrical degrees displacement. 19 M. Godoy Simões, P. Vieira Jr. where : Te ω n Kv Γω a) Ka In Λc – electromagnetic torque (Nm) – electrical speed (rad/s) – phase contributing with torque – velocity constant – contribution of flux from armature current for the armature reaction – torque constant – current at phase n – contribution of flux from permanent magnet for the armature reaction The equations (1)–(9) were implemented in Matlab/Simulink; the differential equations are algebraically commanded by the rotor angle so as to reinitialize the initial conditions and redefine variables and system matrices in accordance to the absolute angle position of the rotor. The model needs the machine electrical parameters and the back-EMF experimental characterization as presented before. b) c) Fig. 4 shows the complete system model where initially an open loop operation was evaluated in order to observe steady state response and allow the understanding of the full operating range of such drive. The effect of rotor position displacement was studied in order to validate the inclusion of armature reaction. Figs. 5 (a) and (b) depict the simulated waveforms for two different conditions of displacement showing that for 3 degrees of displacement the current can barely be established with a very sluggish response, while for 27 degrees the current will establish much faster at the expense of strong distortion. An open loop validation of the drive system was performed in order to substantiate the study of the variables’ range for a closed loop control. Figs. 6 (a), (b), (c) and (d) show phase current, phase voltage, torque and speed for open loop operation, imposing a variation in the dutycycle for all the five phases in the PWM modulator. There is a torque and speed oscillation due to duty-cycle change. The torque response is not optimized since it is an open loop operation, but overall the system is well behaved with this open loop command. A closed loop system was designed in accordance with the block diagram of Fig. 4, and the proportional-integral controller was fine-tuned by imposing several transient conditions. Fig. 7 shows the system response for a torque reference step command from 5 Nm to 20 Nm. The system response is so fast that only two electrical cycles are required for establishing the operation, as indicated by the current and voltage waveforms. The simulation does not consider any current limitations but in the real application such high current peak will be avoided through protection circuitry. The output torque has an overshoot as indicated in Fig. 7 (c) but shaft and load friction impose a damped speed response, as indicated by Fig. 7 (d). Control system implementation d) Fig. 6: Open loop behavior. The transient is because of the prescribed PWM duty-cycle variation, (a) Terminal current, (b) Terminal voltage, (c) Machine torque, (d) Machine speed. 20 A custom made Motorola 56824-based DSP board was designed and implemented for this project. The board is represented in Fig. 8. It is connected to a personal computer with the well-documented ISA bus. The description of such a board is outside the scope of this paper and is available in [12]. CodeWarrior user-friendly tools were used for software development and debugging [13] [14]. A dual-access 64K memory on the DSP board, addressed as locations 0 × 030000 through 0 × 3FFFF, provide the background communication. Although the PC can read and write other memory areas on the board, it incurs more overhead because the DSP chip must be “held” during PC accesses. The variables or arrays that are being passed must be defined as global variables. Those locations can hold pointers to variables or arrays of pointers; therefore, they are used to communicate between the Processor Boards and the PC. EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 A Five-Phase Brushless DC-Machine Direct Drive System a) c) b) d) Fig. 7: Closed loop behavior. An outer torque loop commands the machine operation (a) Terminal current, (b) Terminal voltage, (c) Machine torque, (d) Machine speed. Fig. 8: DSP-PC system The control software that runs in the DSP-PC Board is a multitasking, real-time program as indicated by Fig. 9. Therefore, it is necessary to trigger the interruptions by software in such a way that lower level interruptions are able to be interrupted by higher level ones with automatic context save/restoring of variables. The most critical time assignment task is the operation of the PWM timers and the ADC converters. The eight channel ADC conversion is triggered at the end of Task 1 and the complete conversion of the four channels takes 32 ms, which is inside the 100 ms setup for the PWM. Two timers activate the PWM, one decrementing from an initial value and another one setting up it again to recount. For the Motorola DSP56824 with the duty-cycle resolution ranges from 100ns to 13.1msec. A semaphore handler coordinates Task 1 for acquisition and PWM setup plus Task 2 running at 1 msec for torque control loop which contains a first order IIR filter for torque estimation plus a discrete PI controller. The timing is roomy enough for background com- EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 Fig. 9: Tasks coordination chart for the DSP control code munications within the control loop structure indicated in Fig. 10. The control loop structure has four main routines: (1) input/output of analog data, (2) input/output of digital data (PWM five phase output included), (3) signal filtering, and (4) torque control. The algorithm procedure acquires and filters the five-phase currents, estimates the average value proportional to the instantaneous torque, estimates torque by using the experimental torque parameter, computes error with the reference, processes a proportional-integral difference equation, and programs the PWM initialization with the PI result bounded to internal scaling. Before closing the loop, an experimental evaluation, depicted in Fig. 11, of the relationship of duty-cycle with respect to the average current was performed so as to have a clear indication of the wide machine range. Fig. 11 is a family of curves taken from experimental evaluation of the open loop response of the armature current in respect to the PWM duty-cycle imposed to the five 21 M. Godoy Simões, P. Vieira Jr. a) b) c) Fig. 10: Torque control implementation structure d) Fig. 11: Open loop experimental evaluation of duty-cycle relation with current phase converter for several operating speeds. Such family of curves helped to understand the expected range of operation of the drive system in closed loop control. A mechanical optimization of the absolute encoder position was carefully conducted in the laboratory in order to optimize alignment. Figs. 12 (a), (b), (c) and (d) show the response for a mechanical shift of the absolute encoder set at 5 degrees, 10 degrees, 15 degrees and 20 degrees. A heuristic procedure was used in this mechanical adjustment by looking at the best current rise and fall time response, bounded current spikes, and personal evaluation of vibrating noise. The experimental displacement was also used to validate the simulation studies where the misalignment was simulated with lookup tables, as previously described. A perfect comparison of the simulated strategy (Fig. 5) with the 22 Fig. 12: Experimental evaluation of current waveform due to the optical disc mechanical displacement; (a) 5 electrical degrees displacement, (b) 10 electrical degrees displacement, (c) 15 electrical degrees displacement, (d) 20 electrical degrees displacement real implementation (Fig. 12) was not possible because that would require much more elaborated instrumentation that is only available in Fine Mechanics laboratories. However, the overall simulated behavior was very close to the observed electrical response, validating our simulation strategy of the optical encoder mechanical adjustment. A torque controller was implemented in the DSP system in accordance with Fig. 10; the PI parameters were fine tuned to Kp = 1 and Ki = 0.01. Fig. 13 (a) shows a step torque response from 5 Nm to 15 Nm, where the real mechanical torque is presented with the reference value, showing a very fast response. Figs. 13 (b) and (c) show the steady-state current and voltage waveforms before and after the step torque command. The five-phase machine was connected to a dc-machine with shunt resistances to EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 A Five-Phase Brushless DC-Machine Direct Drive System a) b) c) Fig. 13: Torque control (a) step response, (b) terminal voltage and current for low torque level, (c) terminal voltage and current for high torque level absorb incoming power and the speed was kept within the range 650 rpm to 750 rpm. The steady-state voltage and current waveform indicated in Figs. 13 (b) and (c) confirmed the expected duty-cycle and average current evaluation in open-loop as indicated previously by Fig. 11. [2] P. Delarue, A. Bouscayrol and B. Francois: Control implementation of a five-leg voltage-source-inverter supplying two threephase induction machines, IEEE International Electric Machines and Drives Conference, Villeneuve d'Ascq, June 1-4, 2003, France, vol. 3, pp. 1909–1915. [3] B. Arnet and M. Jufer: Torque control on electric vehicles with separate wheel drives, EPE '97, Trondheim, Norway, September 1997, pp. 659–664. [4] B. Hredzak and P.S.M. Chin: Design of a novel multi-drive system with reduced torque pulsations for an electric vehicle, Power Engineering Society Winter Meeting, Jan. 23–27, 2000, Singapore, vol. 1, pp. 208–212. [5] S. Gataric: A polyphase cartesian vector approach to control of polyphase ac machines, Conf. Rec. of IEEE IAS Annual Meeting, Oct. 8–12, 2000, Rome, Italy, vol. 3, pp. 1648–1654. [6] M. Godoy Simões and Petronio Vieira Jr.: A high torque low-speed multiphase brushless machine – A Perspective application for electric vehicles, IEEE Trans. on Industrial Electronics, October 2002, vol. 49, no. 5 pp. 1154–1164. [7] M. Godoy Simões and P. Vieira Jr.: Model development and design of a wheel-motor drive system, Proceedings of EPE – PEMC, September 5–7, 2000, Kosice, Slovak Republic, pp. 74–79. [8] P. Pillay and R. Krishnan: Modeling of permanent magnet motor drives, IEEE Trans. on Industrial Electronics, November/ December 1988, vol. 35, no. 4, pp. 537–541. [9] P. D. Evans and D. Brown: Simulation of brushless dc drives, IEE Proceedings – B, vol. 137, issue 6, November 1990, pp. 299–308. [10] T. Kenjo and S. Nagamori. Permanent-Magnet and Brushless DC Motors, Oxford Science Publications, 1985. [11] T. S. Low, K. J. Tseng, T. H. Lee, K. W. Lim, K. S. Lock: Strategy for the instantaneous torque control of permanent-magnet brushless dc drives, IEE Proceedings – B, vol. 137, issue 6, November 1990, pp. 355–363. [12] M. Godoy Simões and S. Szafir: A DSP computer platform for mechatronics teaching and research, ASEE Computers in Education Journal, Oct./Dec. 2003, vol. XIII, no. 4, pp. 15–25. [13] Motorola, DSP 56L811 User’s Manual, Motorola Inc., 1996 [14] Motorola, Motorola DSP 56800 Family Manual, Motorola Inc., 1996 The Authors Conclusion The paper showed that the design and evaluation of a polyphase brushless dc-machine direct drive system suitable for high performance and reliability is critical for applications such as EV, HEV, aerospace and the requirements are not cost oppressive. This work presented the design, analysis and issues regarding the high-level modeling comprised of a transient model in conjunction with their corresponding experimental evaluation. Analysis was made to put together the modeling efforts with the expected behavior so as to have realistic simulation results verified by the experimental setup. The dynamic modeling permitted the control strategy design and validation with a DSP-based torque loop control and comprehensive experimental results validated the work. References [1] A. Bouscayrol, B. Davat, B. B. De Fornel, B. Francois, J.P. Hautier, J.P. F. Meibody-Tabar, M. Pietrzak-David: Multi-machine multi-converter system for drives: analysis of coupling by a global modeling, Conf. Rec. of IEEE IAS Annual Meeting, Oct. 8–12, 2000, Rome, Italy, vol. 3, pp. 1474–1481. EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004 M. Godoy Simões, Ph.D., earned the B.Sc. and his M.Sc. degrees from the University of São Paulo, Brazil, and his Ph.D. degree from the University of Tennessee, in 1985, 1990 and 1995, respectively. In 1998, he also received a D.Sc. degree (Livre-Docência) from the University of São Paulo. Dr. Simões joined the faculty of the University of São Paulo from 1989 to 2000 and Colorado School of Mines in April 2000. He has been working to establish research and education activities in the development of intelligent control for high-power electronics applications in renewable and distributed energy systems. Dr. Simões is currently serving as IEEE Power Electronics Society Intersociety chairman. He is associate editor of Energy Conversion as well as editor of Intelligent Systems of IEEE Transactions on Aerospace and Electronic Systems. He is also associate editor of Power Electronics in Drives of IEEE Transactions on Power Electronics . He has been actively involved in the Steering and Organization Committee of the IEEE 2005 International Future Energy Challenge. Dr. Simões is IEEE Senior-Member, EPE, IEE and Cigré Member. He was the recipient of a National Science Foundation (NSF) Faculty Early Career Development (CAREER) in 2002. It is the NSF’s most prestigious award for new faculty members, recognizing activities of teacher-scholars who are considered most likely to become the academic leaders of the 21st century. 23 M. Godoy Simões, P. Vieira Jr. Petronio Vieira Jr. received his B.Sc degree (1985) in Electrical Engineering from Federal University of Pará (UFPA), his M.Sc. degree (1996) in Power Electronics from Federal University of Santa Catarina (UFSC) and his Ph.D. degree (2000) in Mechatronics from University of São Paulo. He was a visiting research fellow at Colorado School of Mines, USA, in 2000. Dr. Vieira is member of Brazilian Power Electronics Society (SOBRAEP), the Brazilian Society of Maintenance (ABRAMAN) and member of the Institute of Electrical and Electronics Engineers. (IEEE). He worked for Centrais Elétricas do Norte do Brasil S.A from 1985 to 1987 in the maintenance of synchronous 300MW generators. He has been a faculty member at the Computer and Electrical Engineering Department (DEEC) of Federal University of Pará since 1987. Dr. Vieira has been involved in teaching undergraduate courses in energy conversion and power electronics, and graduate courses in electronic drives where he coordinates and supervises the research of efficiency issues of electrical drives. He is the head of the Power Electronics Laboratory of DEEC. His main research interests are control, instrumentation and electronic drives for industrial applications and systems. European Power Electronics and Drives Journal Guidelines for the preparation of a paper to be published in EPE journal Submitting a paper The papers will be submitted by e-mail (Word or .pdf), one paper copy will be sent as well, including full coordinates. E-mail address: bsneyers@vub.ac.be. Mail address: EPE Secretariat, c/o VUB-TW, Pleinlaan 2, B-1050 Brussels, Belgium The text will be typewritten without page set-up (no columns, no styles). Paragraphs are separated by a line space. Titels are in bold with level indication: size or number. They finish without a period(.). Figure captions will be included in the text and will be of the kind: Fig. 1: Typical figure caption Writing the paper. The paper will be written in English. The originals of the figures will be given: ink drawings, photographs, lazer print out... Figures can be included in the general file. The title will be chosen short and expressive. It will be followed by the authors' names, title, function and address and by keywords. Figures and photographs will be sent back after use, upon request. Deadlines The paper will start with a summary that will allow non-specialists to understand the problem, have an idea of the state of the art, and understand the originality of the described solutions. The summary will be half a typewritten page long and refer to a figure. The figure will be particularly clear and eloquent. EPE Journal is published quarterly. Submitted papers undergo a reviewing process of about 6 months. Publication dates are as follows: Vol. 13 no 1: out 15/02/2003, special issue on Matrix Converters The end of the paper will include a list of references and the authors' curriculi and photographs. Vol. 13 no 2: out 15/05/2003, normal issue with peer reviewed papers When the paper is accepted Vol. 13 no 3: out 15/08/2003, special issue on Sensorless Drives Texts are sent on floppy disks with indication of the format and a paper copy. Vol. 13 no 4: out 30/11/2002, normal issue with peer reviewed papers EPE 2005, 11 – 14 September in Dresden, Germany http://www.epe2005.com http://www.epe-association.org Call for papers on p. 5 of this issue. Don’t miss the event! 24 EPE Journal ⋅ Vol. 14 ⋅ no 3 ⋅ August 2004