Transition to Calculus Lecture Notes for Department of Mathematics
advertisement

Lecture Notes
for
Transition to Calculus
Department of Mathematics
University of North Dakota
Grand Forks, ND 58202
Fall 2003
Preface
This collection of lecture notes is designed for use in Arts and Sciences 250 - Transition to
Calculus, at the University of North Dakota. This course is not a comprehensive preparation
for calculus. It is designed for either the student who needs a few gaps filled in order to be
ready for calculus, or for the student who is in calculus, but needs to refresh their precalculus
skills.
c
2003
University of North Dakota Mathematics Department
Permission is granted to copy, distribute and/or modify this document under the terms of
the GNU Free Documentation License, Version 1.2 or any later version published by the Free
Software Foundation; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover
Texts. A copy of the license is included at http://www.gnu.org/copyleft in the section
entitled ”GNU Free Documentation License.”
i
TABLE OF CONTENTS
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1. Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2. Polynomial Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3. Rational and Algebraic Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4. Partial Fraction Expansion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5. Exponential and Logarithmic Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6. Exponential Growth and Decay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
7. Conic Sections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
8. Basic Trigonometric Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
9. Special Values of Trigonometric Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
10. General Sinusoids . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
11. Trigonometric Identities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
12. Applications of Trigonometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
13. Polar Coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
14. Parametric Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Appendices
A. The Real Number Line and the Cartesian Plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
B. Lines. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .66
C. Factoring Polynomials and Complex Arithmetic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
D. Solving Systems of Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . on line
E. Rotation of Axes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Index . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
ii
Introduction
We denote the set of real numbers by IR, and the Cartesian Plane by IR2 = IR × IR. For
more information on these sets see appendix A. Information on lines is contained in appendix
B. These appendices should be read carefully before proceeding.
A relation of real numbers is a subset of IR × IR. Des Cartes’ invention allows us to
represent any relation of real numbers graphically. That is, the graph of a relation, R, consists
of all ordered pairs (a, b) ∈ IR2 , where (a, b) ∈ R. Given a relation, R, its inverse relation,
denoted by R−1 is the relation R−1 = {(b, a)|(a, b) ∈ R}. The graph of R−1 will therefore be
the graph of R reflected across the line y = x.
Commonly a relation will be describable by a system of equations and inequalities. Thus
we may think of a relation as the set of pairs (a, b) for which the equations and inequalities
E1 (a, b), E2 (a, b), . . . , En (a, b) are all true. So for example E1 (x, y) may be x2 = y 2 , and
E2 (x, y) might be |x| ≤ 1. The relation defined by these is S = {(a, b)|a = ±b and − 1 ≤ a ≤
1}. If we put R1 = {(a, a)|a ∈ IR} and R2 = {(a, −a)|a ∈ IR}, then R = R1 ∪ R2 is the relation
defined by E1 . Moreover if we set T = {(x, y)| − 1 ≤ x ≤ 1}, then T is the relation defined by
E2 , and S = R ∩ T . Notice that S = S −1 .
In an attempt to deal with the general case we see that we must at least be able to
determine relations described by a single equation, rule, or formula. Moreover it will be
advantageous if one variable in the equation is completely determined by the other, since in
this case every single input will yield exactly one ordered pair as output. This explains why
we will spend most of our time considering functions.
Section 1: Functions
Given two sets of real numbers A and B, a function, f , is a relation of real numbers with
the property that for every a ∈ A, there is exactly one b ∈ B, so that (a, b) is in the relation.
Notationally we write f : A −→ B. Also when (a, b) is in the relation we write b = f (a). As
alluded to above, we will usually be able to describe f by an equation in x and y. But since
y is determined, given x, we can rewrite the equation to be y − f (x) = 0, where f (x) is some
formula, or rule dependent on x. Equivalently we write y = f (x).
Given a function y = f (x), where f : A −→ B, we call A the domain of f and B the
codomain. We write A = dom f . Graphically a ∈ dom f if and only if the vertical line x = a
1
Section 1: Functions
intersects the graph of f . In fact this vertical line test allows us to separate those relations
which are functions, from those which are not. A relation f is a function only if every vertical
line x = r intersects the graph of f at most once. The domain of a function can be equated
with those values of r for which the intersection is non-empty.
We will suppose that B = IR. However we are interested in the subset C of B consisting
of all b ∈ B so that b = f (a) for at least one a ∈ A. This subset is the range of f . We write
C = ran f . A number s ∈ IR is in the range of f only if the horizontal line y = s intersects
the graph of f at least once.
The end behavior of the functions describes how the output values tend as the inputs
become large in absolute value. We write x −→ ∞ to mean x grows without bound positively,
and x −→ −∞ to mean that x grows without bound negatively. In general the notation
E −→ F means that the expression E is becoming arbitrarily close to the expression F . A
line ax + by + c = 0 (not both a = 0 and b = 0) is an asymptote for a function if the graph of
the function becomes arbitrarily close to the graph of the line.
If a ∈ IR and f (a) ≤ f (b) for all b ∈ dom f , (a, f (a)) is a global minimum. If a ∈ IR
and f (a) ≤ f (b) for all b in an interval I containing a, then (a, f (a)) is a relative minimum.
Global maximum and relative maximum are defined similarly.
A function for which f (−x) = f (x) will have a graph which is symmetric about the y-axis.
Such a function is called an even function. A function for which f (−x) = −f (x) will have a
graph which is symmetric about the origin. Such a function is called odd.
An intersection of the graph of a function with a coordinate axis is called an intercept. A
function may have many x-intercepts, but has at most one y-intercept.
Given a function as a rule or formula we can use dom f , ran f , its end behavior, any
asymptotes it has, any symmetry it has, and its x-intercepts and y-intercept to help sketch
the graph of f . Conversely, given the graph of f we can describe each of the characteristics
above.
As the example in the introduction points out, we also need to be able to determine
how functions interact. To begin with, given real functions f : A −→ IR and g : C −→ IR
their sum is f + g : A ∩ C −→ IR defined by (f + g)(x) = f (x) + g(x). The difference, and
g
g
product are defined similarly. The ratio of g by f is denoted by . The domain of consists
f
f
2
Section 1: Functions
1
.
f
Finally, the composition of g by f is denoted by (f ◦ g)(x) = f (g(x)). The domain of f ◦ g is
of all x ∈ A ∩ C so that f (x) 6= 0. A special type of ratio is the reciprocal, denoted
{x ∈ dom g|g(x) ∈ dom f }.
An important case of the above operations occurs when y = g(x) = c, and c is a positive
real number. In this case dom g = IR and if f : A −→ IR, then A∩ dom g = A = dom f . Now
the function f1 (x) = (f +g)(x) has the same domain as f and its graph is {(x, f (x)+c)|x ∈ A}.
Which is to say that we may graph f1 by translating every point of the graph of f up c units
vertically. Similarly the graph of f2 = f − g can be made by translating every point of the
graph of f down c units. The graph of f3 = (f g) can be formed by scaling every second
coordinate of a point on the graph of f by a factor of c. Similarly the ratio of f by g can
be graphed by scaling all second coordinates of points on the graph of f by a factor of 1/c.
When g(x) = −1, the product f g may be graphed as the reflection of the graph of f across the
x-axis. More generally if g(x) = d 6= 0 we can graph the function f g by reflecting the graph
of f across the x-axis if necessary, and then scaling second coordinates by a factor of |d|.
Another special case occurs when g(x) = dx, d 6= 0, or g(x) = x − c, where c > 0. In the
second case when we compose g by f we have
dom (f ◦ g) = {x ∈ dom g|g(x) ∈ dom f } = {x|x − c ∈ dom f } = {x + c|x ∈ dom f }.
So the graph of this composition consists of {(x + c, f (x))|x ∈ dom f }. Which means that
to graph the composition, we simply translate the graph of f to the right c units. Similarly if
g(x) = x + c, where c > 0, then the graph of f ◦ g would be the graph of f shifted left c units.
In the first case when d > 0 the graph of f ◦ g is {( xd , f (x))|x ∈ A}. So this composition can
be graphed by compressing the scale of the x-axis by a factor of d. Notice that if 0 < d < 1,
this compression turns out to be expansion by a factor of 1/d. When g(x) = −1, the graph of
f ◦ g is the reflection of the graph of f across the y-axis. In general we reflect across the y-axis
if d < 0 and compress the scale of the x-axis by a factor of |d|.
Of very great interest is the possibility that g = f −1 . To begin with we must have
that f −1 is a function, and not simply a relation. This means that the graph of f −1 must
pass the vertical line test. Since the graph of f −1 is the graph of f reflected across the
line x = y we have that the graph of f must satisfy the horizontal line test. That is, every
horizontal line y = b intersects the graph of f at most once. In this case we say that f is a
3
Section 1: Functions
one-to-one function. Now for every point (a, b) on the graph of f , so that b = f (a), we have
a = f −1 (b). Consequently (f −1 ◦ f )(a) = f −1 (f (a)) = f −1 (b) = a. Also for b ∈ dom f −1 ,
(f ◦ f −1 )(b) = f (f −1 (b)) = f (a) = b.
One last characteristic of a function we will investigate is its difference quotient, which
f (x + h) − f (x)
is found by forming the expression
, where h is an infinitessimally small, but
h
nonzero, real number. The denominator is actually (x + h) − x, so the difference quotient is
the slope of the line through the points (x, f (x)), and (x + h, f (x + h)). This slope describes
how y = f (x) changes when x changes by h units.
To illustrate the ideas we have developed let us consider a function of the form y = f (x) =
xn , where n is a non-negative whole number. We call such a function a natural power function.
Henceforth we will dispense with the case n = 0, since we get f (x) = 1. So in the sequel unless
otherwise specified, natural power function will denote a power function f (x) = xn with n > 0.
Notice that xn = x · x · . . . · x, with n factors makes sense for any x ∈ IR. We can therefore
take dom f to be any subset of IR. Most often we will take dom f = IR.
Next, if n = 2m, where m is a positive whole number, then f (x) = xn = x2m = (x2 )m ≥ 0,
since x2 ≥ 0. Thus a function of this form has ran f ⊂ [0, ∞). Indeed graphing a few of these
leads us to conclude that ran f = [0, ∞). On the other hand when n = 2k + 1, where k is
a non-negative whole number, this is no longer true. In fact as x −→ ∞, xn −→ ∞ whether
n is even or odd. But as x −→ −∞, x2m −→ ∞ while x2k+1 −→ −∞. So when n is odd,
ran f = IR. Moreover we see that the end behavior of a natural power function is determined
by whether n is odd or even. You might also have guessed that f (x) = x2m is even while
f (x) = x2k+1 is odd.
Every natural power function passes through (0, 0). In fact if xn = 0 we deduce that
x = 0. So each natural power function f (x) = xn has exactly one x-intercept which coincides
with its y-intercept.
By definition, the reciprocal, g(x), of a natural power function f (x) = xn has domain
1
1
IR − {0}. A formula for g is g(x) =
= n , which we also write as x−n . When n is even
f (x)
x
ran g = (0, ∞). When n is odd, ran g = IR − {0}. As x −→ ∞, xn −→ ∞, when n > 0. The
reciprocals of arbitrarily large positive numbers are infinitessimally small positive numbers.
So as x −→ ∞, g(x) −→ 0. Likewise, the reciprocals of arbitrarily large negative numbers
are infinitessimally small negative numbers. Thus as x −→ −∞, g(x) −→ 0. So g(x) has the
4
Section 1: Functions
x-axis y = 0 as a horizontal asymptote. When n is even, g(x) gets arbitrarily close to 0 but
is positive so we write g(x) −→ 0+ . When n is odd, the values of g(x) are negative when x is
so as x −→ −∞, g(x) −→ 0− . By reversing our reasoning we realize that x = 0 is a vertical
asymptote of g(x). We now write g(x) −→ ∞, as x −→ 0+ . When n is even we get g(x) −→ ∞
as x −→ 0− . When n is odd we have g(x) −→ −∞ as x −→ 0− .
The functions of the form f (x) = xl where l is a whole number are the integral power
functions. From the preceding paragraphs we see that the integral power functions consist of
the natural power functions and their reciprocals.
Next, when n is odd, any integral power function passes both the vertical and horizontal
√
line tests. Therefore f −1 is a function. We use the formula f −1 (x) = n x. Alternatively we
1
have f −1 (x) = x n , from the multiplicative law of exponents. However when n 6= 0 is even,
f (x) fails the horizontal line test. In this case f −1 is a relation but not a function. In order
to partially correct this problem we restrict the domain of f to a set A for which the graph of
f will pass the horizontal line test. By convention for n even we take A = [0, ∞), for n > 0
and A = (0, ∞), for n < 0. For this restricted function, f −1 is now a function and we use the
same notation as the odd case.
When we repeatedly combine natural power functions (including f (x) = 1) using sums,
multiples, and differences we get the class of polynomial functions. When we compose integral
power functions and inverses of integral power functions we get the rational power functions.
√
For example if we compose f (x) = x3 by g(x) = x1/2 we get h(x) = (x3 )1/2 = x3/2 = ( x)3 .
Lastly, when f is a natural power function the difference quotient for f takes the form
f (x + h) − f (x)
(x + h)n − xn
xn + nxn−1 h + h2 k(x, h) − xn
=
=
= nxn−1 + h(k(x, h))
h
h
h
as long as h 6= 0, where h2 k(x, h) is the rest of the expansion of (x + h)n in terms of x and
h. So as h −→ 0, the difference quotient of f approaches nxn−1 . We can also algebraically
simplify difference quotient formulas for more general power functions.
Exercises:
1. Find a simplified formula for the difference quotient of
1
a) f (x) =
x
√
b) f (x) = x
c) f (x) = x2 − 4x + 6
5
Section 1: Functions
2. Read Section 2 and appendix C.
3. Let f (x) = ax2 + bx + c, with a 6= 0 and a, b, c ∈ IR.
a) Complete the square on x.
b) Use part a) to show that f is a shift and/or scale of y = g(x) = x2 .
c) Use part a) to show that f has either one double zero, two real zeroes, or no real zeroes.
6
Section 2: Polynomial Functions
To help you grasp the importance of this little section we encourage you to borrow a
non-reform calculus text from another student, or the local library. There should be a chapter
titled “Sequences and Series”. In this chapter will be a section titled “Taylor Polynomials”.
This section is not normally covered in calculus until the second semester, so you’ll have to
wait quite a while to appreciate the contents. The gist of the section is that any function can
be approximated relatively well using polynomials. This is enormously important, since polynomials require no division, and completely accurate division is not easy to do on a computer.
Also since polynomials are nothing more than linear combinations of natural power functions
they are quite simple to utilize.
Starting with a polynomial p(x) = an xn + an−1 xn−1 + . . . + a1 x + a0 , where an 6= 0 and
a0 , a1 , . . . , an ∈ IR are constants, it is fairly clear that dom p is any subset of IR. We usually
choose dom p = IR.
Computing the range of an arbitrary polynomial can be more of a problem. Sometimes
we can do it by inspection. The general computation often requires calculus.
Since 1 ≤ x implies 0 < x we can successively multiply both sides of 1 ≤ x by x without
changing the direction of the inequality. We arrive at the string of inequalities 1 ≤ x ≤ x2 ≤
x3 ≤ . . . ≤ xn . The point is that as x gets large, the leading term, an xn of a polynomial will
dominate all other terms. So the end behavior of a polynomial is the same as the end behavior
of its leading term. Thus if n is odd, the range of a polynomial will be IR. If n is even we may
need calculus to specify the range, but at least we know a polynomial’s end behavior. Since
n is an important parameter of a polynomial we give it a name, to wit the degree. Strictly
speaking the degree of the polynomial p(x) = 0 is not defined. Some texts will set the degree
of the zero to be −1, others will define its degree to be negative infinity.
The graph of a polynomial of degree n will “waggle” no more than n − 1 times. Peaks of
waggles are relative (sometimes global) maximums. Valleys of waggles are relative (sometimes
global) minimums. This behavior is another feature of polynomials describable after just a
modicum of calculus. So is the fact that polynomials have no asymptotes.
A polynomial is even if and only if its only nonzero coefficients have even subscripts. A
polynomial is odd if and only if its only nonzero coefficients have odd subscripts.
In between the ends, the behavior of a polynomial is mostly dictated by the fact that its
7
Section 2: Polynomial Functions
graph has no breaks, and that it can be factored into the form (see appendix C)
p(x) = an (x−r1 )e1 (x−r2 )e2 (. . .)(x−rk )ek (x2 +b1 x+c1 )f1 (x2 +b2 x+c2 )f2 . . . (x2 +bj x+cj )fj ,
where n = e1 + e2 + . . . + ek + 2(f1 + f2 + . . . + fj ), none of the quadratic factors crosses
the x-axis (so b2i − 4ci < 0), and the values r1 < r2 < . . . < rk indicate the x-coordinates of
p(x)’s x-intercepts. The values r1 , r2 , . . . , rk are the roots of the polynomial. The y-intercept
is (0, p(0)) = (0, a0 ).
When we let qi (x) = (x − ri )ei , for i = 1, 2, . . . , k, and pi (x) = p(x)/qi (x), we see that
“near x = ri ” p(x) will behave like a shift ri units right (left if ri is negative) of the function
axei , where a = pi (ri ). This phenomenon is called local behavior.
A fairly decent sketch of the graph of a polynomial can be constructed by piecing together
the local behavior (including the end-behavior) so that the end result is a smooth curve with
no breaks (this is using what is known as the Intermediate Value Theorem from calculus).
The reciprocal of a polynomial is a special kind of rational function. Rational functions
are the topic of the next section.
A polynomial will be invertible as a function only if n is odd and the graph has no
waggles. So a polynomial often has only a local inverse. In fact it can be somewhat difficult to
algebraically find a formula for the local inverse. Try for example q(x) = x4 − 4x2 + 2. Some
√
examples are easier, such as p(x) = x5 − 2. Here if y = x5 − 2, y + 2 = x5 . So x = 5 y + 2.
√
Therefore p−1 (x) = 5 x + 2.
The difference quotient of a polynomial is not too hard to compute given that the difference
quotient of a sum is the sum of the difference quotients, and that the difference quotient of
a constant times f is the constant times the difference quotient of f . So for example if
p(x) = 3x2 − 4x + 5 its difference quotient is
p(x + h) − p(x)
[3(x + h)2 − 4(x + h) + 5] − [3x2 − 4x + 5]
=
h
h
2
2
3(x + 2xh + h ) − 4x − 4h + 5 − 3x2 + 4x − 5
=
h
3x2 + 6xh + 3h2 − 4x − 4h + 5 − 3x2 + 4x − 5
=
h
2
6xh + 3h − 4h
=
= 6x + 3h − 4, as long as h 6= 0
h
8
Section 2: Polynomial Functions
Exercises:
1. For each polynomial function sketch a graph of the function by transforming the graph of
an integral power function.
a) f (x) = x3 − 2
b) f (x) = −3x4 + 6
c) f (x) = 2(x − 3)5 − 1
d) f (x) = −(2x − 4)2
2. Use the zeroes and end behavior of each polynomial function to sketch an approximation
of its graph.
a) f (x) = (x + 1)2 (x − 2)2
b) f (x) = x(x + 2)2
c) f (x) = −x(x − 1)(x + 2)
d) f (x) = (x + 1)(x − 2)2
3. A square box without a lid is to be constructed by cutting out four squares of side x from
the corners of a 30in. by 30 in. piece of cardboard. Determine the surface area of the box as
a function S of the variable x. Compute the surface area when x = 4. What is dom S?
9
Section 3: Rational and Algebraic Functions
A rational function is one which is defined as the ratio of polynomials. So if r(x) is a
p(x)
rational function, r(x) =
, where p(x) = pn xn + pn−1 xn−1 + . . . + p1 x + p0 and q(x) =
q(x)
qm xm + qm−1 xm−1 + . . . + q1 x + q0 6= 0 are polynomials of degree n and m respectively.
Write p(x) = pn (x − r1 )e1 (x − r2 )e2 . . . (x − rk )ek (x2 + a1 x + b1 )f1 . . . (x2 + aj x + bj )fj and
q(x) = qm (x − s1 )g1 (x − s2 )g2 . . . (x − sl )gl (x2 + c1 x + d1 )h1 . . . (x2 + ci x + di )hi as per the real
factors theorem. If p and q have a common irreducible quadratic factor, we may cancel it since
it is never zero for real inputs. If p and q have a common zero, a, then r(a) is not defined and
otherwise for x 6= a, r(x) is the same as the ratio of p(x)/(x − a) by q(x)/(x − a), continuing to
cancel linear factors of the form (x − a) until at most one of the numerator and denominator
has x − a as a factor. In the sequel we can therefore focus our attention on rational functions
where the numerator and denominator have no common factor (so r(x) is in lowest terms so
to speak).
If r(x) is a rational function in lowest terms, then r(x) is defined, unless q(x) = 0. So
the domain of r(x) is all real numbers which are not roots of q(x). The range of a rational
function cannot in general be computed without the aid of graphing or calculus.
Supposing that we’ve already canceled common factors and p(x) and q(x) are as in the
pn n−m
x
as |x| −→ ∞. So if n < m r(x) −→ 0 as
first paragraph, r(x) will behave like
qm
x −→ ±∞. Thus the graph has y = 0 as a horizontal asymptote in this case. If n = m
pn
pn
r(x) −→
as |x| −→ ∞. So now the graph has the line y =
as horizontal asymptote.
qm
qm
If n > m, by the division algorithm we can write p(x) = d(x)q(x) + s(x), where the degree
of s(x) is strictly less than the degree of q(x). (s(x) is not zero here since we have already
s(x)
s(x)
canceled common factors.) Now we write r(x) = d(x) +
. Since
−→ 0 as |x| −→ ∞,
q(x)
q(x)
r(x) has the same end behavior as d(x). The graphs of r(x) and d(x) will become arbitrarily
close as |x| −→ ∞. If n = m+1, then d(x) takes the form d1 x+d0 i.e. d(x) is a linear function.
The line y = d1 x + d0 will be an asymptote for the graph of r(x). We call such an asymptote
a slant asymptote to distinguish it from the vertical and horizontal asymptotes. In general a
rational function r will have a vertical asymptote whenever c is a root of its denominator. To
help draw the graph of r(x) we determine the behavior of r(x) as x −→ c+ and as x −→ c− .
Only in special cases can we determine maxima and minima for a rational function.
A rational function is even iff both its numerator and denominator are even, or both its
10
Section 3: Rational and Algebraic Functions
numerator and denominator are odd. A rational function is odd iff the numerator is odd and
the denominator is even or vice versa. A rational function in reduced form has x-intercepts
wherever its numerator is zero. The y-intercept, if it exists, is r(0). If we have compiled the
previous information for a rational function, we can usually present a good sketch of its graph.
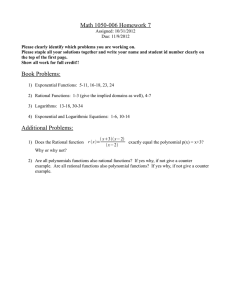
x2 − 2x − 3
, we have p(x) = x2 − 2x − 3 = (x − 3)(x + 1) and q(x) =
x3 − 4x
x3 − 4x = x(x − 2)(x + 2). So dom r = (−∞, −2) ∪ (−2, 0) ∪ (0, 2) ∪ (2, ∞). Since the degree
Example 1 If r(x) =
of p is strictly less than the degree of q, r(x) has y = 0 as a horizontal asymptote. The lines
x = −2, x = 0 and x = 2 are vertical asymptotes for the graph of r(x).
As x −→ −2− , p(x) −→ 5 and q(x) −→ 0− so r(x) −→ −∞. As x −→ −2+ , p(x) −→ 5
and q(x) −→ 0+ so r(x) −→ ∞. As x −→ 0− , p(x) −→ −3 and q(x) −→ 0− so r(x) −→ −∞.
Similarly as x −→ 0+ , r(x) −→ ∞. Finally as x −→ 2− , r(x) −→ ∞ and as x −→ 2+ , r(x) −→
∞.
The function r(x) is neither even nor odd. It has x-intecepts when x = 3 and x = −1.
The graph does not intersect the y-axis since r(0) is not defined. To facilitate sketching a
graph of r(x) we also compute values for r(x) near the interesting values of x on the graph.
x
−3
r(x) −4/5
−3/2
6/7
−1/2
−14/15
1
4/3
5/2
−14/45
7/2
6/77
Not only do these function values help us decide how to scale our y-axis, they tell us that there
is basically no hope of showing these points exactly. So the scale on our y-axis needs to be
fine enough to approximate −14/45 as about −1/3, but no finer.
4
2
-4
-2
2
-2
-4
11
4
Section 3: Rational and Algebraic Functions
Rational functions are interesting in that the sum, difference, product, quotient and composition of rational functions are again rational functions. In fact rational functions are linear
combinations of horizontal shifts of integral power functions. The topic of the next section is
the decomposition of a given rational function into a sum of simpler rational functions.
In general the inverse (or partial inverse) of a rational function, is a rational function.
2x + 1
2y + 1
. Then to solve for f −1 algebraically we set x = f (y) =
.
x−1
y−1
This means x(y − 1) = 2y + 1. So xy − x = 2y + 1. If we collect all terms with y’s in them on
Example 2: Let f (x) =
the right hand side and move all other terms to the left hand side we arrive at xy − 2y = x + 1.
x+1
So y(x − 2) = x + 1. Therefore y = f −1 (x) =
.
x−2
Difference quotients of rational functions tend to get pretty messy, which motivates generating more powerful methods in calculus.
Linear combinations of rational power functions form the set of algebraic functions. After
some algebra an algebraic function can be place in the form f (x) = g(x)/h(x). As with rational
functions we will emphasize the analysis of algebraic functions where g and h have no common
factors. The domain of an algebraic function is then {x ∈ dom g ∩ dom h|h(x) 6= 0}. As
before we usually need more power to compute the range of a general algebraic function. End
behavior of an algebraic function is determined by the dominate terms from its numerator
and denominator. An algebraic function f intersects the x-axis only when g(x) is zero, and
x ∈ dom h. Also f will have a vertical asymptote when h(x) = 0, and x ∈ dom g.
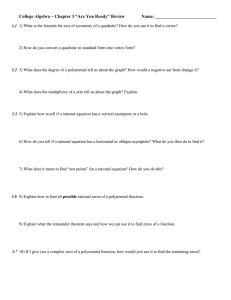
√
(x − 1)
Example 3 Let f (x) = √
. So g(x) = x − 1 with dom g = IR, and h(x) = x2 − 4x,
x2 − 4x
√
with dom h = {x ∈ dom p(x)|p(x) ∈ dom s(x)} where p(x) = x2 − 4x and s(x) = x and
dom s = [0, ∞). So x ∈ dom h iff x2 − 4x ≥ 0. Which by means of a sign graph we find to
be equivalent to x ∈ (−∞, 0] ∪ [4, ∞). So dom g ∩ dom h = dom h, and
dom f = {x ∈ dom h|h(x) 6= 0} = (−∞, 0) ∪ (4, ∞).
x
x
As x −→ ±∞, f (x) behaves like √ =
. So f (x) −→ 1 as x −→ ∞, and f (x) −→ −1
|x|
x2
as x −→ −∞. As x −→ 0− , g(x) −→ −1 and h(x) −→ 0+ so f (x) −→ −∞. As x −→
4+ , g(x) −→ 3 and h(x) −→ 0+ , so f (x) −→ ∞.
It is again true that we cannot determine extreme values without graphing/calculus.
Our function f is neither even, nor odd.
The graph of f neither intersects the x-axis, nor intersects the y-axis. After computing a
12
Section 3: Rational and Algebraic Functions
few function values we sketch the following graph.
6
4
2
-2
2
4
6
-2
-4
You might suppose that as the complexity of a function increases (polynomial to rational
function to algebraic function) so does the computation for finding f −1 algebraically, if it’s
even possible.
As with rational functions, algebraic functions have difference quotients that in general
are pretty nasty. Some are not too bad.
√
√
Example 4: Let f (x) = x + 3. Then f (x + h) = x + h + 3, and f (x + h) − f (x) =
√
√
√
x + h + 3 − x + 3. The trick to proceeding is to multiply by 1 in the form ( x + h + 3 +
√
√
√
x + 3)/( x + h + 3 + x + 3), since the resulting numerator is the difference of squares,
1
√
namely (x + h + 3) − (x + 3) = h. So the difference quotient reduces to √
.
x+h+3+ x+3
Exercises:
x2 − 1
. Find the domain of f . Then determine its end behavior,
x3 + 3x2 − 4x − 12
and all asymptotes to its graph. Next find f ’s intercepts. Use all of this information to sketch
1. Let f (x) =
and label a graph of f .
2. Determine a rational function which has vertical asymptotes at x = −1 and x = 2, a
horizontal asymptote at y = 2, and x-intercepts at 0 and 4.
x2 − 3x
3. Repeat exercise 1 for f (x) =
.
x+4
x−1
4. Algebraically compute the inverse function for f (x) = √
, or show it can’t be done.
x+1
1
5. Find a simplified form for the difference quotient of f (x) = 2
.
x −4
13
Section 3: Rational and Algebraic Functions
6. A rectangular region of pasture land is to be fenced using 2, 400 linear feet of fence. Say
that the length of the region is l and the width of the region is w. Express the relation between
l, w and 2, 400. Then express the area, A, of the region as
a) a function of l only.
b) a function of w only.
14
Section 4: Partial Fraction Expansion
As alluded to in the previous section, every rational function is writable as the sum of
p(x)
simpler rational functions. Given a rational function, r(x) =
, where p(x) and q(x) 6= 0
q(x)
are polynomials of degree n and m respectively, we first reduce to the case that the numerator
and denominator have no common factor (so r(x) is in lowest terms).
If n ≥ m, by the division algorithm we can write p(x) = d(x)q(x) + s(x), where the degree
of s(x) is strictly less than the degree of q(x). (s(x) is not zero here since we have already
s(x)
canceled common factors.) Now we write r(x) = d(x) +
. So every rational function is
q(x)
the sum of a polynomial and a proper rational function which is one where the degree of the
numerator is strictly less than the degree of the denominator.
The partial fraction expansion of a proper rational function with non-zero, non-constant
denominator q(x) = (x − s1 )g1 (x − s2 )g2 . . . (x − sl )gl (x2 + c1 x + d1 )h1 . . . (x2 + ci x + di )hi
factored as per the real factors theorem, is the expression of r as a sum of proper rational
functions whose denominators are powers of irreducible factors of q(x).
A theorem, which requires linear algebra to prove, is that there are k + 2l real constants
which make this expression unique, where k is the total number of real zeroes of q(x) and l is
the total number of irreducible quadratic factors of q(x), both numbers reflecting multiplicities.
If (x − s)e is one of the factors of q(x), then the partial fraction expansion of r will have e
Ai
terms of the form
, as i = 1, 2, . . . , e. For each factor (x2 + bx + c)f with b2 − 4c < 0
(x − s)i
Bj x + Cj
as j = 1, 2, . . . , f .
the partial fraction expansion of r will have f terms 2
(x + bx + c)j
x2 − 2x − 3
, we have p(x) = x2 − 2x − 3 and q(x) = x3 − 4x = x(x −
x3 − 4x
2)(x + 2). So r is a proper rational function whose denominator has three real zeroes all with
Example 1 If r(x) =
multiplicity one. So there are three real constants, call them A, B and C so that
r(x) =
A
B
C
+
+
x
x−2 x+2
To find these constants we clear denominators on both sides of the equation by multiplying
through by r(x)’s denominator q(x). So
hA
B
C i
x2 − 2x − 3 =
x(x − 2)(x + 2)
+
+
x
x−2 x+2
Ax(x − 2)(x + 2) Bx(x − 2)(x + 2) Cx(x − 2)(x + 2)
=
+
+
x
x−2
x+2
=A(x − 2)(x + 2) + Bx(x + 2) + Cx(x − 2)
15
Section 4: Partial Fraction Expansion
We then can equate coefficients to determine A, B and C, or we can substitute in three distinct
values for x to get a system of three linear equations in the three unknowns A, B and C. For
example if we set x = 0 in x2 − 2x − 3 = A(x − 2)(x + 2) + Bx(x + 2) + Cx(x − 2), then on
the left hand side we get −3 and on the right hand side we get A(−2)(2) = −4A. We deduce
that A = 3/4. If we next set x = 2 (is there a pattern here?) then on the left hand side we
get 4 − 4 − 3 = −3 and on the right hand side we get B · 2(4). So B = −3/8. Finally we set
x to be the root of x + 2, which is to say x = −2 and get 4 + 4 − 3 = 5 on the left hand side
and C(−2)(−4) = 8C on the right. So C = 5/8. We can check that when we start with
3/4
3/8
5/8
−
+
x
x−2 x+2
and put everything back over the common denominator x(x − 2)(x + 2), we get r(x).
If instead we equate coefficients we first expand the left hand side to
A(x2 − 4) + B(x2 + 2x) + C(x2 − 2x) = (A + B + C)x2 + (2B − 2C)x − 4A. So we arrive at
the three linear equations A + B + C = 1, 2B − 2C = −2, and −3 = −4A. Which is simply an
equivalent system of equations.
x2
, then there are four real numbers A, B, C and D so
(x − 2)2 (x2 + 3)
A
B
Cx + D
that r(x) =
+
+ 2
. Clearing denominators yields x2 = A(x − 2)(x2 +
2
x − 2 (x − 2)
x +3
3) + B(x2 + 3) + (Cx + D)(x − 2)2 Equating coefficients yields the system of equations
Example 2: Let r(x) =
0 =A + C
1 = − 2A + B − 4C + D
0 =3A + 4C − 4D
0 = − 6A + 3B + 4D
which can be solved by substitution, or elimination.
Equivalently we can set x = 2 to obtain the equation 4 = 7B. which means B = 4/7.
√
√
√
√
When x = 3i, we get (C 3i + D)( 3i − −2)2 = . . . = (D + 12C) + i 3(C − 4D) = −3.
So C − 4D = 0 and D + 12C = −3. Which by substitution gives 49D = −3. So D =
−3/49 and C = 4D = −12/49. Finally setting x = 1 gives 1 = −4A + 4B + (C + D).
Substituting B = 4/7, C = −12/49 and D = −3/49 gives 1 = −4A + 16/7 − 15/49. So
A = (1 − 16/7 + 15/49)/ − 4 = 12/49.
16
Section 4: Partial Fraction Expansion
Partial fraction expansions are useful as a tactical device in integrating rational functions
in the second semester of calculus, they are used in circuit analysis when network outputs are
expressed as products of transfer functions and inputs under the Laplace transform. They
are also used in combinatorics/discrete mathematics/computer science to solve recurrence
relations by the method of generating functions. (In fact the last application is simply the
discrete version of the Laplace transform procedure.)
Exercises: Find the partial fraction expansion of each rational function.
1. f (x) =
2. f (x) =
3. f (x) =
4. f (x) =
5. f (x) =
x2 − 1
x3 + 3x2 − 4x − 12
x+4
x2 − 3x
x−1
(x + 1)2
1
2
x −4
3x4 − 2x2 + 4
(x2 + 1)2 (x − 2)
17
Section 5: Exponential and Logarithmic Functions
If a is a positive real number we can use the laws of exponents, and the rules for rational
p
power functions to compute ap/q , where
∈ Q. It can be proven that for any irrational
q
number s there is a sequence r1 , r2 , . . . , rn , . . . of rational numbers with the property that as
m approaches ∞, rm approaches s. We then define the quantity as as the value which arm
approaches as m approaches ∞. The result is the base a exponential function y = f (x) = ax .
Using a sequence of rational values to compute the value of as , where s is irrational is
tantamount to plotting rational points on the graph and filling in the remainder of the graph
by connecting the dots with a smooth curve. This is actually how we plot these curves and
their shifts/scales.
For an exponential function the value a = 1 is uninteresting. Moreover the function
1
1
y = ax , where 0 < a < 1 takes the form y = ( )x = x , where b > 1 and a = 1/b. So any such
b
b
function can be analyzed as the reciprocal of an exponential function whose base is greater
than one.
Of all the exponential functions with base greater than one, the most special is the
natural exponential function y = ex , where e is an irrational number approximately equal
to 2.718281828. The actual value of e is the value (1 + h)1/h approaches as h approaches ∞.
This particular value is very special because the slope of a line tangent to the curve y = ex
at the point (r, er ) is simply the function value er . In fact this is the only base for which the
base a exponential function has this property.
Every exponential function y = ax , where a > 0, and a 6= 1 is one-to-one with domain
IR and range (0, ∞). If a > 1 as x −→ −∞, ax −→ 0+ , while as x −→ ∞, ax −→ ∞. So
every exponential function with base a > 1 has the y-axis as horizontal asymptote and no
vertical asymptote. The reciprocal of such an exponential function has bx −→ 0 as x −→ ∞,
and bx −→ ∞ as x −→ −∞. So it has opposite end behavior in one sense, and similar end
behavior in another.
Since the exponential functions with non-trivial base are all one-to-one, they have no
relative extrema. In fact their function values either always increase as x increases, or always
decrease as x increases. Therefore none of the basic exponential functions are even or odd.
The basic exponential functions are never zero, so the graphs never intersect the x-axis.
They all have y-intercept (0, 1). They are only distinguished from each other by their slopes.
18
Section 5: Exponential and Logarithmic Functions
The difference quotient of y = f (x) = ax reduces as follows
f (x + h) − f (x)
ax+h − ax
ax ah − ax
ah − 1
=
=
= ax
h
h
h
h
Set Ca to be the value so that (ah − 1)/h −→ Ca as h −→ 0. It is shown in calculus that
Ce = 1, moreover e is the only value for which this is true.
The inverse function of ax is the base a log function, denoted loga x, except when a = e
in which case we denote it ln x and call it the natural log function.
As inverses each pair of functions y = ax and y = loga x satisfy x = aloga x = loga ax .
Especially for each positive number a we have a = eln a . Thus by the multiplicative law of
exponents ax = ex ln a . So the base a exponential function is a horizontal scaling of ex by a
factor of 1/ ln a. So if we understand the natural exponential function, we should be able to
understand any other exponential function.
ln x
. So every logarithm function is a
ln a
vertical scaling of the natural log function. Thus it will suffice to understand the natural log
In a similar fashion we can show that loga x =
function. The natural log function has domain (0, ∞) and range IR. The end behavior and
asymptotes of ln x are found using the fact that its graph is the reflection of the graph of ex
across y = x. So as x −→ 0+ , ln x −→ −∞, and as x −→ ∞, ln x −→ ∞.
The natural log function has no relative extrema nor any symmetry for essentially the same
reason the function ex doesn’t. The natural log function has no y-intercept and x-intercept at
(1, 0). We have already discussed the inverse of the natural log. We choose not to discuss its
reciprocal or difference quotient.
However there is another reason the natural log function is so “natural.” For t > 1, ln t
can be defined as the area bounded by the curve y = 1/x, the x-axis, and the two vertical lines
x = 1 and x = t. This is sometimes shown in the second semester of calculus.
Finally we remark that the laws of exponents translate into the arithmetic properties of
the log functions. For example
Fact: For positive numbers a and b, ln(ab) = ln a + ln b.
Proof: We write ab = eln(ab) on the one hand. We write ab = eln a eln b = eln a+ln b by the
additive law of exponents on the other. Since ab = ab and ex is one-to-one, we are done.
The other arithmetic properties of ln x are proven similarly. They include ln ab = b ln a,
and ln ab = ln a − ln b.
19
Section 5: Exponential and Logarithmic Functions
Exercises:
1. Sketch and label a graph of each function
a) y = f (x) = 4x−2 + 1
1
b) y = f (x) = ( )x − 2
3
c) y = f (x) = 3e−2x
e) y = f (x) = ln(x + 1) − 2
d) y = f (x) = ex − e−x
2. Determine the value of a CD in the amount of $3000 that matures in ten years and pays
6% per year
a) twice a month, and b) once every 2 months.
3. Give the exact value of a) log27 3, and b) log3 27.
4. Use the properties of logarithms to write the expression ln
√
3x2
so that the result does
(x − 2)7
not contain logarithms of products, quotients, or powers.
1
5. Rewrite the expression ln(2x) − 2 ln(x + 1) + ln(x − 2) as a single logarithm.
3
6. Solve the equation ln(x − 2) + ln(2x − 3) = ln 3 for x.
20
Section 6: Exponential Growth and Decay
This section concerns the behavior of functions of the form y = ekx , where k ∈ IR − {0}.
If k < 0, then because ln x has range IR, we know that k = ln b, for some real number b.
From the graph of y = ln x we see that 0 < b < 1. So y = ekx = bx , where 0 < b < 1. Such
an exponential function is the reciprocal of an exponential function of the form y = ax , where
a = 1/b > 1. In a twist of fate if k > 0, then k = ln a for some a since ln x has range IR, and
from the graph we have a > 1.
This yields another explanation of why y = ex is the natural exponential function to work
with: The horizontal scale y = ekx of the natural exponential function y = ex decreases if
k < 0 and increases if k > 0. This feature allows us to easily model certain behaviors. The
two cases we model correspond to k > 0 which we call exponential growth, and k < 0 which
we call exponential decay.
For exponential growth we start with a quantity Q0 of some material (Q0 > 0). If the
amount of material grows exponentially as a function of time we get Q(t) = Q0 ekt , where the
value of k tells us how fast Q is growing. The function Q(t) is completely determined by Q0 and
k. In fact k can be determined by any two functional values Q(c) and Q(d), where c < d. Since
Q(d)
Q0 ekd
Q(c) = Q0 ekc and Q(d) = Q0 ekd we get that
=
= ekd−kc . Applying ln to both
Q(c)
Q0 ekc
Q(d)
ln Q(d) − ln Q(c)
sides gives ln
= ln Q(d) − ln Q(c) = kd − kc = k(d − c). So k =
. We
Q(c)
d−c
Q(c)
can also find Q0 since Q0 = kc . These simple functions can be used to model populations,
e
and principal in monetary accounts drawing interest compounded continuously.
Exponential decay works similarly except we model quantities which are decreasing. Common examples include modeling the quantity of radioactive substances, and Newton’s Law of
Cooling.
In the case of modeling the quantity of some radioactive substance, the constant k is
related to the half-life of the substance. The half-life, h, of a radioactive substance is the
1
amount of time it takes for a quantity measuring Q0 units to decay to Q0 units. This means
2
1
1
kh
kh
that Q0 = Q(h) = Q0 e . Which implies that = e . Applying ln to both sides gives
2
2
1
ln = ln 1 − ln 2 = − ln 2 = kh. So given one of h or k, we can compute the other.
2
In the case of exponential growth the corresponding idea to half-life, is called the doubling
time. In this case if d is the doubling time we get dk = ln 2.
21
Section 6: Exponential Growth and Decay
Exercises:
1. A biologist counts 6, 000 bacteria in a culture at 8:00 am. Eight hours later they count
18, 000 bacteria in the culture. Find an expression for the number of bacteria (in thousands)
as a function of time t (in hours), where t = 0 corresponds to 8:00 am. How long, in hours,
will it take for the population to reach 35, 000?
2. A 5kg mass of pretendium decays to 2.2 kg in 3 years. What is the half-life of pretendium
in years?
3. A bottle of water at 68◦ F is placed in a freezer whose temperature is 26◦ F. The temperature
of the water is measured as 54◦ F an hour later. From the time the bottle was initially placed
in the freezer, how long, in hours, will it take for the water to be frozen?
22
Section 7: Conic Sections
The general quadratic equation in x and y has the form Ax2 +Bxy+Cy 2 +Dx+Ey+F = 0,
where A, B, C, D, E and F are real numbers. One goal of this section is to determine what the
graph of such an equation looks like. We easily see that if all three of A, B and C are zero,
then we really have a linear equation as in appendix B. So we begin by supposing that not all
three of A, B and C are zero.
Next we realize that if there is no cross term (i.e. B=0), we can complete the squares on
x and y to simplify our task. If there is a cross term (B 6= 0), we can change our coordinate
system to one where there is no cross term. This involves rotating axes, a trick that the ancient
Greeks discovered. The details of this trick require some trigonometry. This is contained in
appendix E.
As soon as we know that it suffices to consider quadratic equations with no cross terms
we can begin looking at specific cases.
Subsection 1: Parabolas The first case is an equation of the form Ax2 +Cy 2 +Dx+Ey +F = 0,
where exactly one of A and C is zero.
Up to symmetry of argument we suppose that A 6= 0. Thus we have Ax2 +Dx+Ey+F = 0.
D
We next collect x-terms on one side of the equation to get Ey + F = −A(x2 + x). We
A
complete the square on x and simplify to
D
D2
D2
x+
−
)
A
4A2
4A2
D 2 D2
= −A(x +
) +
2A
4A
Ey + F = −A(x2 +
D
D2
and rewrite Ey + F −
= −A(x − h)2 .
2A
4A
If E = 0 we divide through by −A to get
We set h = −
D2
F
−
2
4A
A
2
D − 4AF
=
4A2
(x − h)2 =
√
D 2 − 4AF
D 2 − 4AF
Thus x − h = ±
=
±
. If D 2 − 4AF = 0 we get the “double” line
4A2
2A
(x−h)2 = 0, which is x = h twice. If D 2 −4AF < 0 we get no graph. Otherwise D 2 −4AF > 0
r
and we have
x=h+
√
D 2 − 4AF
and x = h −
2A
23
√
D 2 − 4AF
2A
Section 7: Conic Sections
The graph of which is two distinct vertical lines. These three situations are what we call
degenerate cases.
In the nondegenerate case (E 6= 0) we move on by dividing through by E to write
y+
D2
−A
F
−
=
(x − h)2
E
4AE
E
−A
D 2 − 4AF
We set k =
and write y − k =
(x − h)2 . Finally we set c to be the value for
4AE
E
1
−A
1
which
=
and get the standard equation of the parabola y − k = (x − h)2 . We can
4c
E
4c
graph this equation by shifting an appropriate scale of y = x2 . The point (h, k) is called the
vertex. The line x = h is called the axis, short for axis of symmetry. Due to an application in
optics the point (h, k + c) is called the focus. The line y = k − c is called the directrix.
A nondegenerate parabola, P may be defined as the set of points equidistant from the
focus and directrix. After translation we may suppose that the focus has coordinates (0, c)
and the directrix, l, has equation y = −c. So if P = {(x, y)|d((x, y), (0, c)) = d((x, y), l)}, we
p
p
have x2 + (y − c)2 = |y − (−c)| = (y + c)2 . So x2 + y 2 − 2cy + c2 = y 2 + 2cy + c2 . Which
becomes x2 = 4cy.
A parabola is also a conic section, the result of intersecting a plane with a double-napped
cone. Here we suppose that the plane intersects only one of the two nappes. Moreover the
plane is parallel to a generator of the cone.
The parabolas we derived above are functions. The graphs open up and down. If we had
worked on the case C 6= 0 instead we would have arrived eventually at the degenerate cases of
a double horizontal line, no graph, and two horizontal lines. We would have then arrived at the
1
the standard equation x − p = (y − q)2 . This is a relation whose graph is a nondegenerate
4c
parabola which opens left or right. Such a parabola has vertex at (p, q), focus at (p + c, q),
axis with equation y = q and x = p − c as directrix.
Subsection 2: Ellipses The second special case of Ax2 + Cy 2 + Dx + Ey + F = 0 to consider
is that neither of A and C is zero and that they are both positive or both negative. If both
are negative we have
−Ax2 − Cy 2 − Dx − Ey − F = 0,
with both −A and −C positive so let us suppose that A, C > 0.
24
Section 7: Conic Sections
We first complete the squares on x and y to write
A(x2 +
D2
E2
E2
D
E
D2
2
x+
)
+
C(y
+
y
+
)
+
(F
−
−
)=0
A
4A2
C
4C 2
4A 4C
D
E
D2
E2
,k=−
, and R = −F +
+
. Thus A(x − h)2 + C(y − k)2 = R.
2A
2C
4A 4C
Since A and C are strictly positive and the quantities (x−h)2 and (y −k)2 are nonnegative
We set h = −
the left hand side of the previous equation is nonnegative. So if R is negative we have a relation
with an empty graph. Also if R = 0 we must have that both (x − h)2 = 0 and (y − k)2 = 0.
This means that the graph of the relation consists of the single point (h, k). If R > 0 and
R
A = C then our equation becomes (x − h)2 + (y − k)2 = . This is the equation of a circle,
A
R
centered at (h, k) with radius squared . These are the degenerate cases.
A
In the nondegenerate case we have R > 0 and A 6= C. Up to symmetry of argument we
can suppose that A < C. Now we let a and b be the real positive numbers with
1
A
1
C
= , and 2 =
2
a
R
b
R
Our choice of A < C forces a > b, which is an important convention. Our equation now reads
(x − h)2
(y − k)2
+
=1
a2
b2
This is the standard form of the equation. Its graph is called an ellipse.
Similar to a parabola an ellipse can be defined as the set of points with sum of distances to
two foci (= focal points) a fixed constant. To verify this, again suppose that (h, k) = (0, 0) and
that the foci are at (±c, 0). Then if E = {(x, y) ∈ IR2 |d((x, y), (c, 0))+d((x, y), (−c, 0)) = k} we
p
p
have (x − c)2 + y 2 + (x + c)2 + y 2 = k. Notice that k > 2c which is the distance between
the foci. Also the points on the x-axis with coordinates (±a, 0) are on E iff a−c+a+c = 2a = k.
p
p
So now we can write (x − c)2 + y 2 = 2a − (x + c)2 + y 2 . Which by squaring both sides
p
gives (x − c)2 + y 2 = 4a2 − 4a (x + c)2 + y 2 + (x + c)2 + y 2 . We cancel the y 2 terms and
p
expand the terms (x ± c)2 to get x2 − 2xc + c2 = 4a2 − 4a (x + c)2 + y 2 + x2 + 2xc + c2 . Which
p
p
reduces to 0 = 4a2 − 4a (x + c)2 + y 2 + 4xc. We rewrite this as a (x + c)2 + y 2 = a2 + xc.
Squaring both sides gives a2 (x + c)2 + a2 y 2 = a4 + 2a2 xc + x2 c2 . Expanding the term (x + c)2
gives a2 x2 + 2a2 xc + a2 c2 + a2 y 2 = a4 + 2a2 xc + x2 c2 . Collecting x terms and cancelling the
2a2 xc terms leaves (a2 − c2 )x2 + a2 y 2 = a4 − a2 c2 = a2 (a2 − c2 ). Here we use the fact that
a > c > 0 and write b2 = a2 − c2 . Now b2 x2 + a2 y 2 = a2 b2 , which reduces to x2 /a2 + y 2 /b2 = 1.
25
Section 7: Conic Sections
In general the graph of an ellipse is an elongated circle. The graph has two axes of
symmetry = lines about which the graph is symmetric. These have equations x = h and y = k
respectively. The line y = k joins the two points (h − a, k) and (h + a, k) on the graph. These
are at distance 2a from each other. The other axis joins the two points (h, k − b) and (h, k + b)
which are at distance 2b from each other. So in the nondegenerate case we call y = k the
major axis, and x = h the minor axis.
If C < A our convention puts our standard equation in the form
(y − k)2
(x − h)2
+
=1
b2
a2
1
C
1
A
=
and 2 = . Now x = h is the major axis and y = k is the minor axis. The
2
a
R
b
R
foci are at (h, k ± c), where again a2 = b2 + c2 .
where
In either case the constant c is less than a. The ratio of c to a is a measure of how
noncircular the ellipse is. This measure is the eccentricity of the ellipse.
Finally we can realize an ellipse as a conic section where the plane intersects one nappe
and is not parallel to a generator of the cone.
Subsection 3: Hyperbolas The last case to consider is Ax2 + Cy 2 + Dx + Ey + F = 0 where one
of A and C is positive and the other is negative. We will start by supposing that we have an
equation of the form Ax2 −Cy 2 +Dx−Ey +F = 0, where A, C > 0. As in the previous section
we complete squares on x and y and simplify our equation by renaming certain quantities. We
arrive at A(x − h)2 − C(y − k)2 = T .
If T = 0 we get A(x − h)2 − C(y − k)2 = 0. We solve this for y in terms of x to get
C
C
y = k + (x − h) or y = k − (x − h). The graph is the union of the two intersecting lines.
A
A
This is the degenerate case.
1
A
1
C
and 2 =
and get
If T > 0 we set a and b to be the positive constants so that 2 =
a
T
b
T
the standard equation
(x − h)2
(y − k)2
−
=1
a2
b2
The line y = k serves as an axis of symmetry. The lines y = k ± a/b(x − h) serve as slant
asymptotes. The foci have coordinates (h ± c, k), where c2 = a2 + b2 .
1
C
1
A
If T < 0 we set a and b to be the positive constants so that 2 =
and 2 =
. The
a
−T
b
−T
standard equation now reads
(y − k)2
(x − h)2
−
=1
a2
b2
26
Section 7: Conic Sections
The graph of the equation is symmetric about x = h and asymptotically approaches the lines
y = k ± b/a(x − h). The foci have coordinates (h, k ± c), where c2 = a2 + b2 .
These are both examples of a hyperbola. A hyperbola is also defined as the set of points so
that the magnitude of the difference of distances to two foci is a fixed constant. For hyperbolas
the ratio of c to a is strictly larger than 1. This ratio is the eccentricity of the hyperbola. The
derivation of the equation of the hyperbola is left to the interested reader.
A hyperbola is also a conic section formed as the intersection of a double napped cone
with a plane which cuts both nappes.
Note on Conic Sections: The intent of this note is to describe the nomenclature used in the
section. To make a right circular cone we use two coplanar lines. We call one, a, the axis
and the other, l, the generator. We do not consider the case that a and l are perdendicular
nor the case that a = l. A right circular cone, C,is generated when l is revolved about a in
a circular fashion. If a and l are parallel, the result is degenerate. We call C a right circular
cylinder. Otherwise a and l intersect in a unique point f called the fulcrum. The result is a
double-napped cone. A conic section is the intersection of a plane P and a right circular cone
C.
If C is degenerate, one possibility is that the intersection of P and C is empty. (This is
either the empty parabola or the empty ellipse.) Another possibility is that P is tangent to
C, in which case the result is the “double” line parabola. When P is not tangent to C but
contains two generators for C we get the degenerate parabola consisting of two parallel lines.
If P is perdendicular to a the result is a circle. Otherwise P ∩ C is a nondegenerate ellipse.
If C is nondegenerate we also get a degenerate section if P contains the fulcrum f . If such
a plane misses both nappes we get a “point” ellipse. When P contains exactly one generator
we get the “double” line parabola. Finally, if P contains two generators (and a), we get the
degenerate hyperbola consisting of two intersecting lines.
If C is nondegenerate and P does not contain f , the only degenerate section occurs when
P is perpendicular to a. The result is a circle.
The last three cases occur when P is not perpendicular to a, does not contain f and C is
nondegenerate. These are the special conic sections which tend to have applications involving
their reflective properties.
We now see that every quadratic equation in x and y must represent a conic section and
27
Section 7: Conic Sections
vice-versa. Hence y = 1/x when written xy − 1 = 0 is recognized as a hyperbola with major
axis the line y = x. A rotation of axes by 45◦ will clear the cross term. So in retrospect we’ve
been discussing conic sections since day one.
Exercises:
1. Find the standard form of the equation for the parabola x2 + 4x − 4y + 8 = 0.
2. Sketch and label a graph of each parabola clearly indicating the vertex, focus, directrix and
axis.
1
(x + 1)2
2
1
b) y − 3 = (x + 1)2
4
1
c) y − 3 = (x + 1)2
8
3. Find the standard equation of a parabola with focus (−1, 2) and directrix x = 1.
a) y − 3 =
4. Sketch and label the graph of the parabola with equation 4x = (y − 1)2 clearly indicating
the vertex, focus, directrix and axis.
5. Sketch and label a graph of each conic section clearly indicating axes of symmetry, foci,
vertices and asymptotes if any.
a) 9x2 + 25y 2 + 36x − 50y − 164 = 0
b) 9x2 − 16y 2 + 36x + 32y − 124 = 0
c) −9x2 + 16y 2 − 36x − 32y − 164 = 0
6. Find the standard equation of an ellipse with foci at (−1, 14) and (−1, −10) which also has
one vertex at (−1, 15).
28