(Non)Equilibrium computation of free energy differences using Langevin dynamics
advertisement
Equilibrium computation of free energy differences using Langevin dynamics")
(Non)Equilibrium computation
of free energy differences
using Langevin dynamics
Gabriel STOLTZ
CERMICS & MICMAC project team, Ecole des Ponts ParisTech
http://cermics.enpc.fr/∼stoltz/
Edinburgh, june 2010
– p. 1/33
Outline of the talk
A brief presentation of methods to compute free energy differences
Thermodynamic integration using Langevin dynamics
Nonequilibrium Langevin dynamics
Edinburgh, june 2010
– p. 2/33
Computing free energy differences
Edinburgh, june 2010
– p. 3/33
Microscopic description of a classical system
Positions q (configuration), momenta p = M q̇ (M diagonal mass matrix)
Microscopic description of a classical system (N particles):
(q, p) = (q1 , . . . , qN , p1 , . . . , pN ) ∈ E
For instance, E = T ∗ D = D × R3N with D = R3N or T3N
More complicated situations can be considered... (constraints defining
submanifolds of the phase space)
N
X
p2i
+ V (q1 , . . . , qN )
Hamiltonian H(q, p) =
2m
i
i=1
All the physics is contained in V
Canonical probability measure:
µ(dq dp) = Z
−1 −βH(q,p)
e
dq dp,
1
β=
kB T
Edinburgh, june 2010
– p. 4/33
Sampling the canonical measure
The aim is to compute an approximation of the high dimensional integral
Z
hAi =
A(q, p) µ(dq dp)
T ∗D
Restated as a one-dimensional integral using ergodic properties of an
irreducible dynamics for which the canonical measure is invariant:
1
lim
T →+∞ T
Z
0
T
A(qt , pt ) dt =
Z
A(q, p) µ(dq dp)
a.s.
T ∗D
Overdamped Langevin dynamics (momenta trivial to sample)
dqt = −∇V (qt ) dt +
r
2
dWt
β
Zero mass limit of the Langevin dynamics or the limit of the Langevin
dynamics when the friction goes to infinity (with suitable time rescaling)
Edinburgh, june 2010
– p. 5/33
Langevin dynamics
Stochastic perturbation of the Hamiltonian dynamics
dq = M −1 p dt
t
t
dpt = −∇V (qt ) dt−γ(qt )M −1 pt dt + σ(qt ) dWt
2
Fluctuation/dissipation relation σσ = γ
β
T
Invariance of the canonical measure when it is a stationary solution of the
Fokker-Planck equation ∂t ψ = L∗ ψ with
eβH
−βH
L = {·, H} +
∇p ·
divp γe
β
T
T
and {A1 , A2 } = (∇A1 )T J∇A2 = (∇q A1 ) ∇p A2 − (∇p A1 ) ∇q A2
Irreducibility amounts to controllability (Hörmander condition)
Numerical schemes obtained by a splitting strategy for instance (Verlet
scheme + partial randomization of momenta)
Edinburgh, june 2010
– p. 6/33
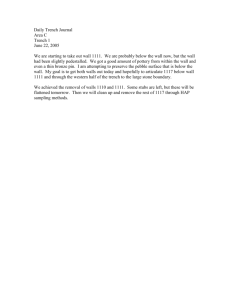
Metastability (1)
Numerical discretization of the overdamped Langevin dynamics:
q
n+1
n
n
= q − ∆t∇V (q ) +
s
2∆t n
G
β
1.5
1.5
1
1.0
x coordinate
y coordinate
where G n ∼ N (0, IddN ) i.i.d.
0.5
0
−0.5
−1
0.5
0.0
−0.5
−1.0
−1.5
−1.5
−1
−0.5
0
0.5
X coordinate
1
1.5
−1.5
0.0
2000
4000
6000
8000
10000
Time
Projected trajectory in the x variable for ∆t = 0.01, β = 8.
Edinburgh, june 2010
– p. 7/33
Metastability (2)
Although the trajectory average converges to the phase-space average,
the convergence may be slow...
Slowly evolving macroscopic function of the microscopic degrees of
freedom: reaction coordinate ξ(q) ∈ Rm with m ≪ N
Two origins : energetic or entropic barriers (in fact, free energy barriers)
y coordinate
x coordinate
8
4
0
−4
x coordinate
(a)
Entropic barrier.
−8
0.0
5000
10000
15000
20000
Time
(b)
Associated trajectory.
Edinburgh, june 2010
– p. 8/33
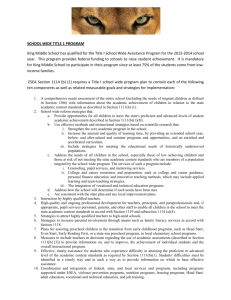
Metastability (3)
1.5
1.5
1
1.0
x coordinate
y coordinate
Assume the free energy F associated with the slow direction x has been
computed, and sample the modified potential V(x, y) = V (x, y) − F (x).
0.5
0
−0.5
0.0
−0.5
−1.0
−1
−1.5
−1.5
−1.5
0.5
−1
−0.5
0
0.5
x coordinate
1
1.5
0.0
2000
4000
6000
8000
10000
Time
Projected trajectory in the x variable for ∆t = 0.01, β = 8.
Many more transitions! The variable x is uniformly distributed.
Reweighting with weights e−βF (x) to compute canonical averages
Compute efficiently the free energy?
Edinburgh, june 2010
– p. 9/33
Computation of free energy differences
Alchemical transition: indexed by an external parameter λ (force field
parameter, magnetic field,...)
Z
−βH1 (q,p)
e
dq dp
;
ZT ∗ D
∆F = −β −1 ln
−βH0 (q,p)
e
dq dp
T ∗D
Typically, Hλ = (1 − λ)H0 + λH1 . Other parametrizations possible (see
Gelman and Meng, Stat. Sci., 1998)
(given) reaction coordinate ξ : R3N → Rm (angle, length,. . . ):
Z
−βH(q,p)
e
δξ(q)−z1 (dq) dp
Σ(z)×R3N
−1
.
Z
∆F = −β ln
−βH(q,p)
e
δξ(q)−z0 (dq) dp
Σ(z)×R3N
n
with Σ(z) = q ∈ D
o
ξ(q) = z
Edinburgh, june 2010
– p. 10/33
Cartoon comparison of the methods (reaction coordinate case)
(a)
(c)
Histogram method
Nonequilibrium switching dynamics
(b)
Thermodynamic integration
(d)
Adaptive dynamics
Edinburgh, june 2010
– p. 11/33
Some elements on the scientific landscape
We focus on the reaction coordinate case
Histogram methods: WHAM (Kumar et al.), MBAR (Chodera/Shirts)
Thermodynamic integration in the Hamiltonian case (Carter et al., den
Otter/Briels, Sprik/Ciccotti) and HMC (Hartmann/Schütte) or for
overdamped Langevin dynamics (Ciccotti/Lelièvre/Vanden-Eijnden)
Nonequilibrium methods: overdamped case (Lelièvre/Rousset/Stoltz) or
steered versions (potentials Vλ (q) = V (q) + K(ξ(q) − λ)2 )
Adpative methods: adaptive biasing force (Darve/Pohorille, Chipot/Hénin),
nonequilibrium metadynamics (Bussi/Laio/Parrinello), Wang-Landau,
self-healing umbrella sampling (Marsili et al., Dickson et al.), etc
Aims of this work:
Thermodynamic integration with Langevin dynamics
Nonequilibrium Langevin dynamics
Edinburgh, june 2010
– p. 12/33
Thermodynamic integration with
Langevin dynamics
Edinburgh, june 2010
– p. 13/33
Constrained Langevin dynamics (1)
Consider the following Langevin process:
−1
dq
=
M
pt dt,
t
dpt = −∇V (qt ) dt − γ(qt )M −1 pt dt + σ(qt ) dWt + ∇ξ(qt ) dλt ,
ξ(qt ) = z
2
Standard fluctuation/dissipation relation σσ = γ
β
T
dξ(qt )
Hidden velocity constraint:
= vξ (qt , pt ) = ∇ξ(qt )T M −1 pt = 0
dt
The corresponding phase-space is Σξ,vξ (z, 0) where
n
o
6N Σξ,vξ (z, vz ) = (q, p) ∈ R ξ(q) = z, vξ (q, p) = vz
An explicit expression of the Lagrange multiplier can be found by
computing the second derivative in time of the constraint
Edinburgh, june 2010
– p. 14/33
Constrained Langevin dynamics (2)
Reformulation of the constrained Langevin dynamics as
dqt = M −1 pt dt,
dpt = −∇V (qt ) dt + ∇ξ(qt )f M (qt , pt ) dt − γP (qt )M −1 pt dt + σP (qt ) dWt ,
rgd
Constraining force (projection of the conservative force + centrifugal term)
−1
M
T
−1
−1
−1
frgd
(q, p) = G−1
(q)∇ξ(q)
M
∇V
(q)
−
G
(q)Hess
(ξ)(M
p,
M
p)
q
M
M
where GM (q) = ∇ξ(q)T M −1 ∇ξ(q)
Projected fluctuation/dissipation matrices
T
(σP , γP ) := (PM σ, PM γ PM
)
T
−1
where PM (q) = Id − ∇ξ(q)G−1
(q)∇ξ(q)
M
M
Edinburgh, june 2010
– p. 15/33
Properties of the projected Langevin dynamics
Generator of the dynamics: L = Lham + Lthm with
1
Lham = { · , H}Ξ ,
Lthm = eβH divp e−βH γP ∇p ·
β
Invariant measure
−1 −βH(q,p)
µΣξ,vξ (z,0) (dq dp) = Zz,0
e
σΣξ,vξ (z,0) (dq dp),
where σΣξ,vξ (z,vz ) (dq dp) is the phase space Liouville measure of
Σξ,vξ (z, vz ) induced by the symplectic matrix J
Reversibility: Law(qt , pt ; 0 ≤ t ≤ T ) = Law(qT −t , −pT −t ; 0 ≤ t ≤ T )
Detailed balance condition (momentum flip S(q, p) = (q, −p))
Z
Z
ϕ1 LΞ (ϕ2 ) dµΣξ,vξ (z,0) =
(ϕ2 ◦ S) LΞ (ϕ1 ◦ S) dµΣξ,vξ (z,0)
Σξ,vξ (z,0)
Σξ,vξ (z,0)
Ergodicity (convergence of the longtime trajectorial averages)
The normalizing constant of this canonical distribution defines a rigid free
energy (more on this later)
Edinburgh, june 2010
– p. 16/33
Numerical discretization
Splitting into Hamiltonian part + constrained Ornstein-Uhlenbeck process
Midpoint scheme for the momenta (reversible for the canonical measure
with constraints)
r
∆t
∆t
γ M −1 (pn + pn+1/4 ) +
σ G n + ∇ξ(q n ) λn+1/4 ,
pn+1/4 = pn −
4
2
with the constraint ∇ξ(q n )T M −1 pn+1/4 = 0
RATTLE scheme (symplectic)
∆t
n
n
n+1/2
n+1/4
n+1/2
∇V
(q
)
+
∇ξ(q
)
λ
,
p
=
p
−
2
q n+1 = q n + ∆t M −1 pn+1/2 ,
pn+3/4 = pn+1/2 − ∆t ∇V (q n+1 ) + ∇ξ(q n+1 ) λn+3/4 ,
2
with ξ(q n+1 ) = z and ∇ξ(q n+1 )T M −1 pn+3/4 = 0
∆t
Overdamped limit obtained when
γ = M ∝ Id
4
Metropolization of the RATTLE part to eliminate the time-step error
Edinburgh, june 2010
– p. 17/33
Thermodynamic integration (1)
The free energy can be estimated from constrained samplings as
Z
1
e−βH(q,p) δξ(q)−z (dq) dp
F (z) = − ln
β
Σ(z)×R3N
Z
1
M
(z) − ln
= Frgd
(det GM )−1/2 dµΣξ,vξ (z,0) + C
β
Σξ,v (z,0)
ξ
with the rigid free energy (constraints on both q and p)
Z
1
M
e−βH(q,p) dµΣξ,vξ (z,0)
Frgd
(z) = − ln
β
Σξ,v (z,0)
ξ
Extension to the case of molecular constraints
Thermodynamic integration through the computation of the mean force
Z
M
M
(q, p) µΣξ,vξ (z,0) (dq dp)
frgd
(z) =
∇z Frgd
Σξ,vξ (z,0)
Edinburgh, june 2010
– p. 18/33
Thermodynamic integration (2)
Longtime (a.s.) convergence
1
lim
T →+∞ T
Z
0
T
M
dλt = ∇z Frgd
(z)
No second order derivatives of ξ needed!
Variance reduction: keep only the Hamiltonian part of λt
Numerical discretization: approximate the mean force using only the
Lagrange multipliers from the RATTLE part:
N−1
N−1
X
X
1
1
M
n n
M
frgd (q , p ) ≃
(λn+1/2 + λn+3/4 )
∇z Frgd (z) ≃
N n=0
N∆t n=0
Consistency result
λn+1/2 + λn+3/4
∆t M n n+1/4
M
=
frgd (q , p
) + frgd
(q n+1 , pn+3/4 ) + O(∆t3 )
2
Edinburgh, june 2010
– p. 19/33
Application: Solvatation effects on conformational changes (1)
2 2
(r − r0 − w)
Two particules (q1 ,q2 ) interacting through VS (r) = h 1 −
w2
Solvent: particules
through the purely repulsive potential
interacting
σ 12 σ 6
VWCA (r) = 4ǫ
−
+ ǫ if r ≤ r0 , 0 if r > r0
r
r
|q1 − q2 | − r0
Reaction coordinate ξ(q) =
, compact state ξ −1 (0),
2w
stretched state ξ −1 (1)
111
000
000
111
000
111
000
111
000
111
000
111
000
111
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
111
000
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
111
000
000
111
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
111
000
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
111
000
000
111
000
111
000
111
000
111
000
111
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
111
000
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
111
000
000
111
000
111
000
111
000
111
000
111
000
111
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
1111
0000
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
0000
1111
111
000
000
111
000
111
000
111
000
111
000
111
000
111
Edinburgh, june 2010
– p. 20/33
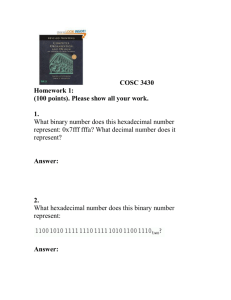
Application: Solvatation effects on conformational changes (2)
0.0
20
−0.5
Free energy
Mean force
10
0
−10
−1.5
−2.0
−20
−30
−0.2
−1.0
−2.5
0.0
0.2
0.4
0.6
Reaction coordinate
0.8
1.0
1.2
−0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
Reaction coordinate
Left: Estimated mean force. Right: Corresponding potential of mean force.
Parameters: β = 1, N = 100 particles, solvent density ρ = 0.436, WCA interactions σ = 1 and
ε = 1, dimer w = 2 and h = 2. Mean force estimated at the values zi = zmin + i∆z, with
zmin = −0.2, zmax = 1.2 and ∆z = 0.014, by ergodic averages obtained with the projected
dynamics with Metropolis correction (time T = 2 × 104 , step size ∆t = 0.02, scalar friction γ = 1).
Edinburgh, june 2010
– p. 21/33
Nonequilibrium Langevin dynamics
Edinburgh, june 2010
– p. 22/33
Presentation of the dynamics (1)
Idea: start at equilibrium and perform a switching from the initial to the
final state in a finite time T
Schedule z(t) for t ∈ [0, T ] and nonequilibrium dynamics
−1
dq
=
M
pt dt,
t
dpt = −∇V (qt ) dt − γP (qt )M −1 pt dt + σP (qt ) dWt + ∇ξ(qt ) dλt ,
ξ(q ) = z(t),
(Cq (t))
t
with equilibrium initial conditions (q0 , p0 ) ∼ µΣξ,vξ (z(0),ż(0)) (dq dp)
T
Projected fluctuation/dissipation relation (σP , γP ) := (PM σ, PM γ PM
) so
that the noise act only in the direction orthogonal to ∇ξ
Hidden constraint on the reaction coordinate velocity vξ (q, p) = ż(t)
M
A computation shows dλt = frgd
(qt , pt ) dt + G−1
M (qt )z̈(t) dt
Not the same dynamics as in Latorre/Hartmann/Schütte
Edinburgh, june 2010
– p. 23/33
Presentation of the dynamics (2)
Backward dynamics: start at equilibrium for the final value of the
schedule, switching with a time-reversed schedule t′ 7→ z(T − t′ )
Initial conditions (q0b , pb0 ) ∼ µΣξ,vξ (z(T ),ż(T )) (dq dp) and evolution
b
−1 b
′
dq
p
′ = −M
′ dt ,
t
t
dpbt′ = ∇V (qtb′ ) dt′ − γP (qtb′ )M −1 pbt′ dt′ + σP (qtb′ ) dWtb′ + ∇ξ(qtb′ ) dλbt′ ,
ξ(qtb′ ) = z(T − t′ )
The generator of the forward dynamics is (Gram matrix Γ = {Ξ, Ξ},
ζ = (z, ż))
Lft = Lham
+ Lthm
+ {·, Ξ} Γ−1 ζ̇(t)
Ξ
Ξ
while the generator of the backward dynamics is Lbt′ = R LfT −t′ R (where
R : φ 7→ φ ◦ S is the momentum flip operator with S(q, p) = (q, −p))
Edinburgh, june 2010
– p. 24/33
Generalized free energy and work
M
Rigid free energy Frgd
(z, vz ) = −
1
ln
β
Z
Σξ,vξ (z,vz )
e−βH(q,p) dµΣξ,vξ (z,vz )
ξ,v
Actual free energy recovered from the difference F (z) − Frgdξ (z, vz ),
which equals, up to an unimportant additive constant:
Z
β T −1
1
(det GM (q))−1/2 exp
vz GM (q)vz µΣξ,vξ (z,vz ) (dq dp)
− ln
β
2
Σξ,v (z,vz )
ξ
Work performed during the switching: several expressions
Z T
ż(t)T dλt
Force times displacement: W0,T {qt , pt }0≤t≤T =
0
Z
T
Energy variations: W0,T {qt , pt }0≤t≤T =
w(t, qt , pt ) dt where
0
d
T −1
w(t, q, p) = ζ̇(t) Γ {Ξ, H} (q, p) =
(q, p) with Φ
H ◦ Φt,t+h dh
h=0
the flow of the switched Hamiltonian dynamics
Edinburgh, june 2010
– p. 25/33
Jarzynski-Crooks relation
For any bounded path functional ϕ[0,T ] ,
−βW0,T ({qt ,pt }t∈[0,T ] )
E ϕ[0,T ] ({qt , pt }0≤t≤T ) e
Zz(T ),ż(T )
=
Zz(0),ż(0)
{q b′ , pb′ } ′
E ϕr
[0,T ]
t
t
0≤t ≤T
where ( · )r denotes the composition with the operation of time reversal of
paths:
ϕr[0,T ] {qtb′ , pbt′ }0≤t′ ≤T = ϕ[0,T ] {qTb −t , pbT −t }0≤t≤T
This leads in particular to the following free energy estimator
−β [W0,T ({qt ,pt }t∈[0,T ] )+C(T,qT )]
1 E e
F (z(T )) − F (z(0)) = − ln
−βC(0,q
)
0
β
E e
1
1
ln det GM (q) − ż(t)T G−1
with the corrector C(t, q) =
M (q)ż(t)
2β
2
Standard methods can then be used (bridge estimators, etc)
Edinburgh, june 2010
– p. 26/33
Some elements on the proof
The proof relies on the following nonequilibrium detailed balance condition
Z
−βH
b
f
dσΣξ,vξ (z(t),ż(t))
ϕ1 Lt (ϕ2 ) − ϕ2 LT −t (ϕ1 ) e
Σξ,vξ (z(t),ż(t))
=
Z
Σξ,vξ (z(t),ż(t))
+
d
dt
Z
βw(t, ·)ϕ1 ϕ2 e−βH dσΣξ,vξ (z(t),ż(t))
Σξ,vξ (z(t),ż(t))
ϕ1 ϕ2 e−βH dσΣξ,vξ (z(t),ż(t))
!
Left-hand side: standard (equilibrium) detailed balance contribution
Right-hand side: evolution of the measure and work correction
Edinburgh, june 2010
– p. 27/33
Numerical schemes: splitting strategy
Fluctuation/dissipation part (no Lagrange multiplier needed)
r
∆t
∆t
γP (q n )M −1 (pn+1/4 + pn ) +
σP (q n )G n
pn+1/4 = pn −
4
2
Hamiltonian part for the forward evolution
∆t
n+1/2
n+1/4
n
n n+1/2
p
=
p
−
∇V
(q
)
+
∇ξ(q
)λ
,
2
n+1
n
−1 n+1/2
q
=
q
+
∆t
M
p
,
ξ(q n+1 ) = z(tn+1 ),
(Cq )
∆t
n+3/4
n+1/2
n+1
n+1 n+3/4
p
=
p
−
∇V
(q
)
+
∇ξ(q
)λ
,
2
∇ξ(q n+1 )T M −1 pn+3/4 = z(tn+2 ) − z(tn+1 ) ,
(Cp )
∆t
which defines a symplectic map
z(tn+1 ) − z(tn )
z(tn+2 ) − z(tn+1 )
Φn : Σξ,vξ z(tn ),
→ Σξ,vξ z(tn+1 ),
∆t
∆t
Edinburgh, june 2010
– p. 28/33
Discrete Jarzynski-Crooks equality: Alchemical case
Idea in the alchemical case
Discrete schedule {λ(0), . . . , λ(tNT )} with NT ∆t = T
0
0
Initial conditions (q , p ) ∼ µ0 (dq dp) =
Z0−1
exp −βHλ(0) (q, p) dq dp
Successive updates of the parameter and the configuration:
Change the parameter from λ(n∆t) to λ((n + 1)∆t)
Update work: W n+1/2 = W n + Hλ((n+1)∆t) (q n , pn ) − Hλ(n∆t) (q n , pn )
Update the configuration using the Verlet map Φn+1 associated with
the Hamiltonian Hλ((n+1)∆t)
W n+1 = W n+1/2 + Hλ((n+1)∆t) (q n+1 , pn+1 ) − Hλ((n+1)∆t) (q n , pn )
Total work: W n = Hλ(n∆t) (q n , pn ) − Hλ(0) (q 0 , p0 )
Z
n
−βW n
=
It can be checked that E e
for any value of ∆t such that the
Z0
Verlet scheme is stable
Extension to path functionals
Edinburgh, june 2010
– p. 29/33
Discrete Jarzynski-Crooks equality: The reaction coordinate case
Discrete schedule {z(0), . . . , z(tNT )}
Initial conditions (q 0 , p0 ) ∼ µΣ
(q b,0 , pb,0 ) ∼ µ
ξ,vξ
“
z(t )−z(t )
z(t0 ), 1 ∆t 0
” (dq dp)
and
„
« (dq dp)
z(tN +1 )−z(tN )
T
T
Σξ,vξ z(tNT ),
∆t
Initial work W 0 = 0, and work update
W n+1 = W n + H(q n+1 , pn+3/4 ) − H(q n , pn+1/4 )
Time discretization error free estimator of the free energy difference:
Z
z(NT ),
Zz(t
z(tN +1 )−z(tN )
T
T
∆t
0 ),
z(t1 )−z(t0 )
∆t
n n
−βW NT
E ϕ[0,NT ] ({q , p }0≤n≤NT ) e
=
′
′
E ϕr[0,NT ] ({q b,n , pb,n }0≤n′ ≤NT )
∆t
∆t
Overdamped limit
γ=M =
Id: no bias due to the finite time-step in
4
2
the estimator (compare to Lelièvre/Rousset/Stoltz, 2007)
Edinburgh, june 2010
– p. 30/33
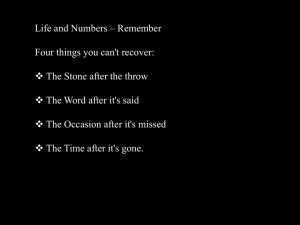
Application: Solvatation effects on conformational changes
4
Free energy
3
2
1
0
−1
0.0
0.2
0.4
0.6
0.8
1.0
Reaction coordinate
Estimated free energy profiles for T = 1 with K = 105 realizations (top curve),
T = 10 with K = 104 and T = 100 with K = 103 (smoothest curve).
Same parameters as before, except ∆t = 0.01. Schedule z(t) = zmin + (zmax − zmin ) Tt with
zmin = −0.1 and zmax = 1.1.
Edinburgh, june 2010
– p. 31/33
References
Edinburgh, june 2010
– p. 32/33
References
The main references for this work:
T. L ELIÈVRE , M. R OUSSET
AND
G. S TOLTZ,
Langevin dynamics with
constraints and computation of free energy differences, arXiv preprint
1006.4914 (2010)
T. L ELIÈVRE , M. R OUSSET
AND
G. S TOLTZ Free energy computations: A
Mathematical Perspective,
Imperial College Press.
Other recent works on adaptive computation of free energy differences:
Free energy methods for efficient
exploration of mixture posterior densities, HAL preprint 00460914 (2010)
N. C HOPIN , T. L ELIÈVRE
AND
G. S TOLTZ,
Free
energy calculations: An efficient adaptive biasing potential method,
J. Phys. Chem. B 114(17), 5823-5830 (2010)
B. D ICKSON , F. L EGOLL , T. L ELIÈVRE , G. S TOLTZ
AND
P. F LEURAT-L ESSARD,
Workshop “Simulation of hybrid dynamical systems and applications to
molecular dynamics” (IHP, Paris, September 27-30th)
Edinburgh, june 2010
– p. 33/33
![\documentstyle[twoside,11pt,psfig]{article}](http://s3.studylib.net/store/data/007560442_2-48982c7e677d9bc3305e1d8bd38bda9c-300x300.png)