AN ABSTRACT OF THE THESIS OF
Charles York for the degree of Master of Science in
Electrical and Computer Engineering presented on September 17, 2010.
Title: Modeling and Experimental Verification of Electric and Magnetic Fields
Generated by Undersea Power Transmission Cables
Abstract approved:
Annette von Jouanne
As interest grows in developing devices to harvest energy from ocean waves, tidal
currents, and offshore wind, concerns over possible environmental effects from
such devices also grow. One such concern is over the induced electric fields and
the generated magnetic fields from generators and their associated submarine
power cables in an ocean environment, including the possible effects on ocean
wildlife. A method for analytically calculating magnetic and electric fields around
undersea power cables based on the carried current was developed. Testing was
performed to validate the analytical solution, and a field deployable
magnetometer device was developed to measure magnetic fields in a marine
environment.
c
Copyright by Charles York
September 17, 2010
All Rights Reserved
Modeling and Experimental Verification of Electric and Magnetic
Fields Generated by Undersea Power Transmission Cables
by
Charles York
A THESIS
submitted to
Oregon State University
in partial fulfillment of
the requirements for the
degree of
Master of Science
Presented September 17, 2010
Commencement June 2011
Master of Science thesis of Charles York presented on September 17, 2010.
APPROVED:
Major Professor, representing Electrical and Computer Engineering
Director of the School of Electrical Engineering and Computer Science
Dean of the Graduate School
I understand that my thesis will become part of the permanent collection of
Oregon State University libraries. My signature below authorizes release of my
thesis to any reader upon request.
Charles York, Author
ACKNOWLEDGEMENTS
I would like to thank the Flora Family Foundation for their generous funding,
which enabled me to perform this study. I also wish to acknowledge the
assistance of Dr. Annette von Jouanne and Dr. Alexandre Yokochi for their
considerable instruction, guidance and moral support; Dr. Adam Schultz for
guidance with ocean physics literature; Dr. Andreas Weisshaar and Steven
Gaskill for enlightening discussion of electromagnetic waves; Shaun McArthur for
his assistance with physics concepts; Alex Bistrika for fabrication of the Ag/AgCl
electrodes; and Doug Halamay and Ean Amon for their help with various Matlab
troubles. I also thank my wife, Michelle, and my children for their patience and
understanding throughout my work on this project.
TABLE OF CONTENTS
Page
1 Introduction
1
2 Necessity of Undersea Cable EMF Research
3
2.1
Cancer Concern in Humans . . . . . . . . . . . . . . . . . . . . . .
4
2.2
Prey Detection in Sharks . . . . . . . . . . . . . . . . . . . . . . . .
5
2.3
Previous Undersea EMF Research . . . . . . . . . . . . . . . . . . .
5
3 Current Density in Ocean Water
8
3.1
Electric Field Within a Dielectric Material . . . . . . . . . . . . . .
8
3.2
Complex Electrical Conductivity As a Function of Frequency . . . .
9
3.3
Lorentz Force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
3.4
Ohm’s Law Expanded . . . . . . . . . . . . . . . . . . . . . . . . .
11
3.5
Polarization Field of Seawater . . . . . . . . . . . . . . . . . . . . .
12
3.6
Total Current Density in Seawater
13
. . . . . . . . . . . . . . . . . .
4 The Helmholtz Double Layer
15
4.1
Steady-State Electric Double Layer . . . . . . . . . . . . . . . . . .
15
4.2
Example Double Layer Thickness . . . . . . . . . . . . . . . . . . .
17
4.3
Time-Varying Electric Double Layer
. . . . . . . . . . . . . . . . .
18
4.4
Example of Double Layer Relaxation Time Near Alternating Current Power Cable . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
5 Electric Field Induced from Time-Varying Magnetic Field
22
5.1
Faraday’s Law of Induction . . . . . . . . . . . . . . . . . . . . . .
22
5.2
Electric Field Due to Magnetic Field . . . . . . . . . . . . . . . . .
24
6 At DC Power
27
6.1
DC Current, Quiescent Water . . . . . . . . . . . . . . . . . . . . .
27
6.2
DC Current, Constant Velocity Moving Water . . . . . . . . . . . .
28
6.3
DC Current, Quiescent Water, Moving Fish . . . . . . . . . . . . .
28
TABLE OF CONTENTS (Continued)
Page
6.4
DC Current, Moving Water, Moving Fish . . . . . . . . . . . . . . .
7 At AC Power
29
31
7.1
AC Current, Quiescent Water . . . . . . . . . . . . . . . . . . . . .
31
7.2
AC Current, Constant Velocity Moving Water . . . . . . . . . . . .
32
7.3
AC Current, Quiescent Water, Moving Fish . . . . . . . . . . . . .
32
7.4
AC Current, Moving Water, Moving Fish . . . . . . . . . . . . . . .
33
8 Experimental Results
34
8.1
Varying Voltage . . . . . . .
8.1.1 Water Not Grounded
8.1.2 Water Grounded . .
8.1.3 Discussion of Varying
. . . . . . . . .
. . . . . . . . .
. . . . . . . . .
Voltage Results
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
38
38
39
40
8.2
Varying Current . . . . . . .
8.2.1 Water Not Grounded
8.2.2 Water Grounded . .
8.2.3 Discussion of Varying
. . . . . . . . . .
. . . . . . . . . .
. . . . . . . . . .
Current Results .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
42
42
43
44
8.3
Experimental Field-Deployable Magnetometer . . . . . . . . . . . .
46
9 Simulation
48
9.1
Magnetic Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
9.2
Electric Field . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
9.3
Discussion of Simulation Results . . . . . . . . . . . . . . . . . . . .
52
9.4
COMSOL Simulation of Three-Phase AC . . . . . . . . . . . . . . .
52
10 Conclusions
10.1
Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bibliography
60
61
62
LIST OF FIGURES
Figure
Page
8.1
Illustration of experimental test configuration. . . . . . . . . . . . .
35
8.2
Example voltage waveform as recorded by Tektronix DPO 7054 Oscilloscope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
Example of data after filtering by Matlab. The blue points represent
the raw data; the red points are the data after filtering has been
done. A strong 60 Hz sinusoidal signal is represented. . . . . . . . .
37
Data for tests in which current was held constant, while the voltage
was varied. There was no ground to the water. Line fit with R2 = 1
is shown. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
Data for tests in which current was held constant, while the voltage
was varied. A ground was connected to the water. Line fit with
R2 = 0.8 is shown. . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
Data for tests in which current was held constant, while the voltage
was varied. Results are shown for cases in which the salt water was
grounded and ungrounded. Line fits with R2 values are shown. . . .
41
Data for tests in which voltage was held constant, while the current was varied. Results for two different tests with the water ungrounded are shown. Line fits with R2 values are shown. . . . . . .
43
Data for tests in which voltage was held constant, while the current
was varied. Results shown for tests in which the water was grounded.
Line fits with R2 = 0.997 is shown. . . . . . . . . . . . . . . . . . .
44
Data for tests in which voltage was held constant, while the current
was varied. Results for tests with ungrounded water, as well as
with the water grounded, are included. The grounded data can be
observed to have a more definite linear trend than the ungrounded.
45
COMSOL simulation results for magnetic flux density B using model
of 10 AWG primary conductor used in experiments compared to
results predicted by analytical model. The analytical solution is
valid only beginning at the surface of the conductor. . . . . . . . . .
49
8.3
8.4
8.5
8.6
8.7
8.8
8.9
9.1
LIST OF FIGURES (Continued)
Figure
9.2
9.3
9.4
9.5
9.6
9.7
9.8
Page
COMSOL simulation results for electric field E using model of 10
AWG primary conductor used in experiments compared to results
of experimental testing. . . . . . . . . . . . . . . . . . . . . . . . . .
50
Results for electric field E predicted with analytical solution, shown
with results from COMSOL simulation and results of experimental testing. The points highlight the predicted values at the same
current values used in COMSOL simulation and physical testing. . .
51
An illustration of the current flowing in each phase of the threephase COMSOL simulation. Each phase, A, B, and C, carries equal
current, and is phase shifted 120◦ from the other phases. Electric
field is shown graphically in other figures at 0◦ , 45◦ , 90◦ , 135◦ , and
180◦ in the sine wave function. These points are indicated here by
vertical lines on the x axis. . . . . . . . . . . . . . . . . . . . . . . .
54
COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 0◦ in the sine wave
function. The top conductor is the neutral; the conductor on the
right is the A phase; the bottom conductor is phase B; and the
conductor on the left is phase C. . . . . . . . . . . . . . . . . . . . .
55
COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 45◦ in the sine wave
function. The top conductor is the neutral; the conductor on the
right is the A phase; the bottom conductor is phase B; and the
conductor on the left is phase C. . . . . . . . . . . . . . . . . . . . .
56
COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 90◦ in the sine wave
function. The top conductor is the neutral; the conductor on the
right is the A phase; the bottom conductor is phase B; and the
conductor on the left is phase C. . . . . . . . . . . . . . . . . . . . .
57
COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 135◦ in the sine wave
function. The top conductor is the neutral; the conductor on the
right is the A phase; the bottom conductor is phase B; and the
conductor on the left is phase C. . . . . . . . . . . . . . . . . . . . .
58
LIST OF FIGURES (Continued)
Figure
9.9
Page
COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 180◦ in the sine wave
function. The top conductor is the neutral; the conductor on the
right is the A phase; the bottom conductor is phase B; and the
conductor on the left is phase C. . . . . . . . . . . . . . . . . . . . .
59
Chapter 1 – Introduction
Recent years have seen an increased interest in renewable energy as a viable alternative to fossil fuels. Wind energy has reached a level of refinement such that it
begins to compete with traditional sources such as coal in cost-effectiveness. Other
forms of renewable energy have begun to be considered to supplement wind, to further reduce dependence on fossil fuels. One such area is ocean power. Research is
being done on methods to harvest energy from offshore ocean sites; ocean waves,
tidal currents, offshore wind, and other forms of ocean power are being considered.
A common element of all offshore ocean power harvesting technologies is the need
to transmit the generated power back to shore. There has been at least one ocean
power device which pumps pressurized water back to the land, where it is used
onshore to generate electricity [1]. However, the more common method is to generate power on the offshore device itself, then transmit that power back to shore by
means of a long power transmission cable running along the sea floor. The voltage
on the conductor produces an electric field in the radial direction outward. The
electric current running through this cable induces a magnetic field; if a conductive
fluid such as sea water moves through this magnetic field, or if the current is alternating, a secondary electric field will be induced. A general concern exists over
the possible negative effects of electric and magnetic fields, and as interest grows
in offshore power generation, it becomes desirable to better understand the levels
2
of these fields that will exist around the transmission cables transporting power
back onto land.
This work seeks to develop an analytical model for the electric and magnetic
fields around a single phase power transmission line submerged in salt water. Experimental testing was conducted to verify the analytical model. Additionally,
computer simulation was performed, using the COMSOL Multiphysics package,
and compared to experimental results and the predicted analytical solution. Such
an analytical solution could be expanded for use with the more complex cases of a
two-conductor, direct current transmission line, a single phase alternating current,
or for a three-phase power cable.
In addition a COMSOL model for a three phase conductor representative of
industrial offshore applications was developed. Finally, a field deployable magnetometer device was developed to measure magnetic fields in a marine environment.
3
Chapter 2 – Necessity of Undersea Cable EMF Research
It is possible to shield an undersea transmission line by including a layer of high
conductivity material inside the cable wall during construction, which, if properly
grounded, would prevent all of the electric field from escaping the cable housing [2].
The magnetic field is considerably more difficult to shield. Around a conducting
wire, the magnitude of the magnetic field is given by equation 2.1:
H=
I
2πr
(2.1)
where r is the distance away from the wire and H is the intensity of the resulting
magnetic field, measured in amperes per meter [3]. Magnetic shielding is accomplished through the use of materials with high magnetic permeability and low
saturation. Due to weight, lack of flexibility, and cost, using high-permeability
materials in the walls of power transmission lines is usually not considered feasible. Additionally, it is difficult to shield the magnetic field around a structure with
~ at
a circular cross-section. Equation 2.2 shows the condition for magnetic field H
a boundary.
~ =0
∇×H
(2.2)
~ (magnetic field) at the inside of a boundary
As can be seen in equation 2.2, the H
~ parallel to it on the outside of the boundary [3]. This
must be equal to the H
4
~ (such as that created by current flowing in a wire)
means that, when a circular H
meets a circular boundary (such as a high-permeability jacket around a power
~ is unaffected from one side of the boundary to the other.
transmission line), the H
Therefore, attempting to shield a transmission line, which is essentially round,
with a circular enveloping shield does little, if anything, to stop magnetic fields from
escaping [2]. This makes efforts at shielding magnetic field even more problematic.
2.1 Cancer Concern in Humans
As everyday usage of electrical and electronic equipment has increased over the
last several decades, considerable concern has been raised over the effect of the
electric and magnetic field (EMF) that is created around power generation devices.
Possibly the best example of this concern is seen in a famous journal article which
linked magnetic fields to childhood occurrence of leukemia [4]. The publication
of this article drew much notice, especially among worried parents. Many later
studies have shown no compelling evidence that low-level EMF causes biological
harm [5]. Though the negative effects of EMF on humans and animals may not
be as severe as suggested in that initial study published in [4], an atmosphere of
trepidation remains prevalent.
5
2.2 Prey Detection in Sharks
As marine renewable technologies have moved more to the forefront, concerns have
been raised over many aspects of the construction of offshore ocean energy generators. One of the major concerns is the effect of the EMF resulting from the power
transmission cable. Elasmobranch species, such as sharks and rays, are one group
of ocean animals that could be affected by the current-carrying power transmission
lines. Much of the physiology of Elasmobranch species remains enigmatic, but certain studies have illustrated that sharks locate prey by the electric field generated
by a living organism [6]. This electric field is extremely small, in the order of 10−6
amperes per meter [7]. There is also some evidence to suggest that sharks may
navigate by using the natural dc magnetic field of the earth [6].
2.3 Previous Undersea EMF Research
In response to this growing public concern over the effect of anthropogenic EMF
sources introduced into an ocean ecosystem, companies and utilities interested in
ocean power harvesting have seen the need to explore the environmental effects
that could occur from installing offshore generator devices.
The major source of information for many studies and reports on the effects of
power transmission lines in an ocean environment has been a series of reports from
a U.K. group called the Collaborative Offshore Wind Research Into the Environment (COWRIE). COWRIE describes itself as a “fund which commissions generic
research specific to the offshore wind industry” [8]. It was started in 2001, and
6
funds studies into environmental issues associated with offshore wind power. As far
as power transmission lines are concerned, offshore wind is similar to most other
forms of offshore energy, in that it uses a large transmission cable to transport
generated power back to shore. Therefore the COWRIE study of EMFs around a
power cable is applicable to most forms of ocean power.
An initial report was released by COWRIE in July, 2003. The EMF section of
this report described the basic design of probes to be used for measuring electric
and magnetic fields in water. A test was performed in the Clwyd Estuary at
Rhyl, North Wales. This estuary has two power transmission cables running along
its bed, and testing was done in their vicinity. The goal of this work was to
measure how the magnetic and electric fields generated by these power transmission
cables attenuated in the sea water. However, measurements showed much higher
electric fields than expected, yielding conflicting results. The report states that,
due to time constraints, the COWRIE team was unable to either further investigate
the high electric fields or conduct more experiments in an alternate location [9].
Though there has been further work done by COWRIE, and subsequent reports
released, there is no indication that a similar follow-up experiment has ever been
conducted.
In later reports, COWRIE described “information gaps” and a “lack of clear
scientific guidance” in current understanding of the possible effects of EMFs on
aquatic animals. One clear recommendation comes from the COWRIE report:
A major effort should continue the development of methods for directly
measuring the electromagnetic fields such as the in situ probe developed
7
through the COWRIE Phase 1 EMF study (CMACS 2003) [10].
In 2008, COWRIE completed a second study, in which mesocosms were constructed on the sea floor. These were essentially small, contained ecosystems, with
fish living inside them, and power transmission cables buried in the sea floor underneath. Currents were run through these undersea power cables to simulate
actual power transmission. Several tests were conducted, each several weeks long,
in which fish species thought to be sensitive to small electric fields were observed
for reaction to the fields around the power cables. The COWRIE researchers observed some sensitivity to the fields around the power cables, but were unable to
determine actual effects on the fish. According to the report,
There is no evidence from the present study to suggest any positive
or negative effect on elasmobranchs of the EMF encountered. This
can only be determined through further specific studies with clearly
defined objectives and also monitoring at offshore wind farm sites with
appropriate analysis over time. [11]
Consideration of previous research into EMF created by underwater power
transmission lines, and their effects on the ocean environment, seems to suggest
only that it is a commonly held belief that some elasmobranch species are sensitive to very small electric fields. Apart from that, there appears to be little else
than concern and speculation. Little, if any, actual recorded measurements from
undersea power transmission lines are available.
8
Chapter 3 – Current Density in Ocean Water
An analytical solution can be determined for the current density that will exist
around an undersea power transmission cable. This current density is created
by the motion of seawater, or of a marine organism, through the electric and
magnetic fields which exist around the transmission cable. This analytical solution
is developed here.
3.1 Electric Field Within a Dielectric Material
~ is conIn the presence of an applied electric field, the electric displacement field D
stant. The electric field within a material which is within the electric displacement
field is shown by [12]
~ = 0 r E
~
D
(3.1)
where 0 is the permittivity of free space and r is the relative permittivity of the
material.
If a dielectric material is placed within an electric field, the molecules of the dielectric polarize. The electric field Ep due to this polarization opposes the external
electric field Eext , such that the internal electric field Eint becomes
~ int = E
~ ext + E
~p = E
~ ext −
E
χ ~
1 ~
Eext =
Eext
1+χ
1+χ
(3.2)
9
with χ being the the electric susceptibility, where χ = r − 1, with r being the
relative permittivity. In this way, the electric field within the dielectric is weaker
than the field outside it. [13]
3.2 Complex Electrical Conductivity As a Function of Frequency
Electrical conductivity of an electrolytic solution is a function of the frequency of
the applied electric field, and is expressed, in siemens per meter, as [14]
σ(ω) =
N e2 tc
r m (1 − iωtc )
(3.3)
where e is the charge of an ion in the solution, N is the number of charges per unit
volume, tc is the average time between collisions of ions, m is the mass of an ion in
the solution, i represents the imaginary number and ω is the angular frequency. In a
steady field, ω equals zero, and the imaginary term in the denominator of equation
(3.3) becomes zero. Thus, in a non-varying electric field, the conductivity is
σ(0) =
N e2 tc
r m
(3.4)
Typical values for seawater are tc ≈ 5×10−12 seconds, N ≈ 2×1026 ions/meter3 ,
and r ≈ 6.2. Using these values, and an angular frequency of ω = 2π60 (60 Hz
being the power frequency in the United States), the ωtc term in the denominator
of equation (3.3) is approximately 1.885 × 10−9 . With this second term in the
denominator therefore being nine orders of magnitude smaller than the first term,
10
it is reasonable to neglect it at power transmission frequencies [14]
Additionally, Apel states that the value of the conductivity of seawater remains
nearly constant up to frequencies well above 100 GHz [14] Therefore, at power
transmission frequencies of 50 or 60 Hz, it is safe to assume that the frequency has
no appreciable effect on the conductivity.
3.3 Lorentz Force
~ and an electric
If a charge q moves at velocity ~u through a magnetic flux density B
~ the charge experiences a Lorentz force defined as [14]
field E,
~ + ~u × B)
~
F~ = q(E
(3.5)
In an electrolyte such as seawater, ions are present and can move. If the
~ 0 in air, then an electric field
seawater is within an electric field which would be E
~ =
E
~0
E
r
is actually present within the seawater, where r is the relative electrical
permittivity of seawater. If
d2 ~
x
dt2
d~
x
dt
represents the velocity of an ion in the electrolyte,
represents its acceleration, m is the mass of the ion, e is its charge, and it
experiences a damping force caused by molecular collisions, at an average collision
frequency of
1
,
tc
then the Lorentz force equation (3.5) becomes its equation of
motion, which is defined as [14]
d2~x
~ + ~u × B
~ − m d~x
m 2 =e E
dt
tc dt
(3.6)
11
Note that a damping force term of
m
tc
d~
x
dt
has been introduced as part of the
ion’s equation of motion.
3.4 Ohm’s Law Expanded
In an environment without significant magnetic field, in a material with conduc~ is present, Ohm’s law can be written as [14]
tivity σ, in which an electric field E
~
~j = σ E
(3.7)
in which ~j is current density in amperes/meter2 .
To determine how to adjust Ohm’s law for the presence of a significant magnetic
field, it is useful to start by defining current density as
~j = N e d~x
dt
(3.8)
where e is the charge of an ion, N is the number of charges per unit volume, and
d~
x
dt
is the velocity of the ion.
At steady state, the acceleration term in the left hand side of equation (3.6)
becomes zero. In this steady state condition, equation (3.6) can be rewritten as [14]
t
d~x
c
~ + ~u × B
~
=e E
dt
m
(3.9)
12
Substituting equation (3.9) into equation (3.8), we see that
~ + ~u × B
~
~j = N e2 tc E
m
(3.10)
Recalling equation (3.4) for the conductivity in a steady electric field, this can
be written as [14]
~ + ~u × B
~
~j = σ E
~ =
where, once again, the electric field E
~0
E
r
(3.11)
is the electric field actually measured in
~ 0 represents the electric field that would be present in air. This
seawater, where E
shows the form of Ohm’s law that must be used in seawater when in the presence
~ component
of significant magnetic field. It is similar to equation (3.7), but the E
~ [14]
has been expanded to include the influence of the magnetic flux density B.
3.5 Polarization Field of Seawater
An additional effect can be seen in seawater due to the polarization of ions within
it, and the movement of these ions through an external electric field. Normally, in
a linearly polarized medium, the relation between the electric displacement field
~ the electric field E
~ and the polarization field P~ is given by [14]
D,
~ = 0 r E
~ = 0 E
~ + P~
D
(3.12)
13
This can be rewritten as
~
P~ = 0 χE
(3.13)
with χ being the the electric susceptibility, where χ = r − 1 (r is the relative
permittivity).
~ must be expanded to include the magnetic flux
In seawater, the electric field E
density, as with Ohm’s law (3.11), so that equation (3.13) becomes [14]
~ + ~u × B
~
P~ = 0 χ E
(3.14)
To a fixed observer, the advection of the polarized ions in the seawater appears
~ , defined as [14]
to be a magnetization M
~ = P~ × ~u
M
(3.15)
where, again, ~u is the velocity of the water. This serves as an additional source of
current density, ~jm , which is [14]
~ = ∇ × P~ × ~u
~jm = ∇ × M
(3.16)
3.6 Total Current Density in Seawater
This current density due to advection of polarized ions, as described above, is
thought to be weak in the ocean. However, in an environment in which an unnatu-
14
rally large magnetic field is present, such as around an undersea power transmission
cable, it is possible that this ~jm could become more significant.
The total current density in seawater in the presence of electric and magnetic
fields therefore becomes the sum of equations (3.11) and (3.16) and is written as
~ + ~u × B
~ + ∇ × P~ × ~u
~jtotal = σ E
(3.17)
~ represents any applied electric field, ~u is the velocity of the
where, to reiterate, E
~ is the applied magnetic flux density, and P~ is the polarization field of
seawater, B
the seawater, described by equation 3.14.
15
Chapter 4 – The Helmholtz Double Layer
The electric field caused by the voltage on a power transmission line can be prevented from escaping the housing by using a grounded shielding material inside
the cable. This is common practice, and will likely be typical of undersea power
lines. Additionally, in a saltwater environment like the ocean, the formation of an
electric double layer (also called the Helmholtz double layer) around the transmission line will prevent the electric field from escaping any appreciable distance into
the surrounding seawater. The behavior of the electric double layer is described
here.
4.1 Steady-State Electric Double Layer
~ will be
If direct current flows through a power cable, a magnetic flux density B
present around the conductor, in a direction orthogonal to the radius. That power
~ will extend outward
cable will be at a certain voltage, and an electric field E
radially from the conductor. If the conductor is surrounded by an electrolytic
solution, such as sea water, the observed electric field outside the conductor will be
altered by the behavior of ions within the water within the electric field. Ions with
opposite charge to that within the conductor will be drawn very near to the surface
of the conductor. Ions with charge alike to that within the conductor will form a
16
diffuse layer above this near-surface layer. This is usually referred to as the electric
double layer or Helmholtz double layer. The diffuse layer is considerably thicker
than the near-surface layer; however, the total thickness of the entire Helmholtz
double layer is still extremely small, typically being measured in Angstroms (Å;
1 × 10−10 meters). [15]
The inner potential φ or Galvani potential is given by Schmickler to be [15]
φ(x) =
σ
exp(−κx)
r 0 κ
(4.1)
where x is the distance from the voltage source in Angstroms, σ is the surface
charge density on the conductor, r and 0 are the relative permittivity and permittivity of free space, respectively, and the Debye inverse length κ is defined
as [15]
κ=
2(ze0 )2 n0
r 0 kT
!1
2
(4.2)
where z is the charge number of the ions in the solution, e0 is the charge of an
electron, n0 is the density of ions in the solution, r and 0 are the relative permittivity and permittivity of free space, respectively, k is the Boltzmann constant,
and T is the temperature. The Debye length LD is equal to 1/κ.
The Debye length can also be expressed as a function of molarity M , assuming
room temperature, as [16]
1
1
LD = 0.304M − 2 nm = 3.04M − 2 Å
(4.3)
17
where M is the molarity of the solution, in moles per liter.
4.2 Example Double Layer Thickness
Consider the case in which the conductor is at 100 volts. The potential at the
surface of the conductor gives the boundary condition, such that φ(0) = σ/r 0 κ =
100V . Solving equation (4.1) using this boundary condition, for the position x
where φ(x) = 1V will give the distance from the conductor at which the potential
has dropped to 1 volt, or 1 percent of its original value at the conductor. Solving
this shows that x ≈ 44.21Å (4.421 nm). If equation (4.1) is solved in the same way
again, but with φ(x) = 230, 000V , it is seen that x ≈ 118.52Å. Therefore, if the
undersea power cable is at a voltage of 230 kV, the potential will have dropped to
a single volt (in this case, about 4.35 × 10−4 percent of original voltage) over the
space of 118.52 Angstroms (11.852 nm).
This double layer of ions opposes the electric field which would be present if
the power cable were in air, which is the field caused by the voltage present at the
conductor . The electric field drops to, effectively, zero across the double layer.
Since the distance across the double layer is so small, the electric field within the
double layer can be extremely high; even a small source voltage of 1 volt can
generate an electric field of up to 109 volts per meter within the electric double
layer [15]
~ caused by the voltage on the conductor,
This results in the electric field E,
being effectively blocked by the Helmholtz double layer, and is therefore negligible
18
in the bulk sea water outside the double layer, in the area which would be seen in
any reasonable real-world measurement.
4.3 Time-Varying Electric Double Layer
A study by Morrow, McKenzie and Bilek [17] examined the time-varying behavior
of the electric double layer in a saline solution. The electric field distribution within
a small, saline solution-filled gap between two parallel electrodes was measured, as a
voltage pulse was applied to the electrodes. The observations were compared to the
analytical Gouy-Chapman solution, and a relaxation time τ was defined as the time
required for the observed electric field distribution to match the Gouy-Chapman
solution with a correlation factor r = 0.98. A formula for this relaxation time τ
as a function of the solution molarity and the voltage between the electrodes was
determined by analysis of empirical measurements, and is given, in microseconds,
as [17]
2
τ ≈ 0.128M −0.517 e92V µs
(4.4)
where M is the molarity of the saline solution, and V is the voltage potential
difference between the electrodes.
The voltage V in equation (4.4) assumes a gap of 1 × 10−6 meters between
the electrodes, as was used in the study. The equation can be modified to be a
function of molarity and electric field, rather than voltage, and written as
−6 )2
τ ≈ 0.128M −0.517 e92(E×10
µs
(4.5)
19
where M is again the molarity of the saline solution, and E is the electric field
between the electrodes.
4.4 Example of Double Layer Relaxation Time Near Alternating
Current Power Cable
Consider the simple example of a 10 kV, single-phase, two-conductor AC power
cable installed on the sea floor. Each of the two conductors has a radius r = 0.1
meters, separated by a thin layer of insulating material with distance D = 2r = 0.2
meters between the centers of each conductor. The conductors are then surrounded
by a thicker layer of insulation, with each conductor separated from the sea floor
by a distance of H = 0.3 meters. Let Hxx be the distance from the center of one
conductor to a point H meters under the sea floor directly beneath it, such that
Hxx = 2H, and Hxy be the distance from that conductor to a point H meters
under the other conductor, such that Hxy =
q
2 + D2 .
Hxx
The line-to-line capacitance of this configuration is shown by [18]
Cxy =
ln Dr
π
Hxy
− ln H
xx
(4.6)
The electric field around a long, thin conductor of radius r, with charge density q coulombs per meter, and with permittivity in the material around the
conductor, is given as [19]
E(r) =
q
2πr
(4.7)
20
Line-to-line capacitance Cxy , voltage V , and charge density q in coulombs per
meter are related by the equation [18]
q = Cxy V
(4.8)
Substituting equations (4.6) and (4.8) into equation (4.7) gives the following
result for electric field E
E(r) =
V
2r ln
D
r
Hxy
− ln H
xx
(4.9)
Using the values given earlier with equation (4.9), a value for the electric field
around our simple example undersea power line is E ≈ 106 kilovolts per meter.
Consider further that the voltage in the example power line is a 60 Hz, 230
kilovolt sinusoidal waveform. The half-cycle time for this waveform is approximately 8.33 × 10−3 seconds. This would be the rise (or fall) time for the voltage.
Assuming a molarity for seawater of M = 0.05 moles per liter, and the electric
field, just calculated using equation (4.9), of E ≈ 780 kilovolts per meter, equation
(4.5) gives a relaxation time of τ ≈ 1.69 × 10−6 seconds.
The calculated relaxation time is three orders of magnitude smaller than the
half-cycle time for the 60 Hz sinusoidal voltage. This illustrates that the formation
of the Helmholtz double layer in the seawater surrounding the undersea power
cable will closely follow the rising and falling voltage of the alternating current
being transmitted through the cable, and will thus shield the bulk seawater from
21
effects of the electric field, similarly as it does for a direct current line, at any
reasonably measurable distance.
22
Chapter 5 – Electric Field Induced from Time-Varying Magnetic
Field
In a direct current power transmission line, the only electric field will be that
caused by the voltage that exists on the conductor. As discussed previously, that
electric field is readily shielded. In the case of an alternating current power line, the
time-varying magnetic field will induce an electric field. Since the magnetic field
is difficult to shield, it is likely that this electric field will exist around an undersea
transmission line. Here, Maxwell’s equations are used to develop an analytical
solution for calculating electric field from the time rate of change of magnetic field.
5.1 Faraday’s Law of Induction
Faraday’s Law of Induction, one of the Maxwell equations, states that the curl
of the electric field E is equal to the negative of the time rate of change of the
magnetic flux density B. The derivative form of Faraday’s Law of Induction is
written as
~ =
∇×E
~
−∂ B
∂t
(5.1)
~ is written in its expanded form as
The curl of the electric field, ∇ × E,
!
~ =
∇×E
!
!
∂Ex ∂Ez ~
∂Ey ∂Ex ~
∂Ez ∂Ey ~
−
i+
−
j+
−
k
∂y
∂z
∂z
∂x
∂x
∂y
(5.2)
23
where ~i is the unit vector in the x axis direction, ~j is the unit vector in the y axis
direction, and ~k is the unit vector in the z axis direction, in a three-dimensional
Cartesian coordinate system.
Consider a coordinate system in which the z axis is away from the viewer (“into
the page”), the x axis is along the horizontal, and the y axis is in the vertical
direction. An electric current is flowing through a conductor in the positive z axis
direction, at the intersection of the x and y axes (the point at which x = y = 0).
~ will exist around the conductor in a clockwise direction,
The magnetic field H
~ is related to the
following the right-hand-rule. Since the magnetic flux density B
magnetic field by equation (5.3)
~ = µH
~ = µ0 µr H
~
B
(5.3)
where µ0 is the permeability of free space and µr is the permeability of the material
~ is passing, B
~ also exists in a clockwise direction around the
through which H
conductor.
Recalling Faraday’s Law of Induction, shown in equation (5.1), the time deriva~ can be expanded and written as
tive of B
~
∂B
=
∂t
!
!
!
∂Bx ~
∂By ~
∂Bz ~
i+
j+
k
∂t
∂t
∂t
(5.4)
Now consider a point in the coordinate system previously described, which is
directly to the “right” of the conductor, where x has a positive value and y = 0.
~ has only a y component, such that Bx = 0, Bz = 0, and By = |B|.
At this point, B
24
Therefore,
∂Bx
∂t
= 0 and
∂Bz
∂t
= 0, such that equation (5.4) becomes
~
∂B
=
∂t
!
∂By ~
j
∂t
(5.5)
~ changes with x and y, and is constant with respect
The magnetic flux density B
~ is dependent on the current, which is flowing uniformly
to change in the z axis, as B
in the z direction. Any component of the electric field which is a result of the timevarying magnetic flux density will also have no change due to change of position
in the z direction, so that the
∂Ex
∂z
term of equation (5.2) is also equal to zero.
As two equal vectors must have equal components, and equation (5.5) shows
~ has only a ~j component, referring to equation (5.1)
that the time derivative of B
~ must also have only a ~j component. Now equation (5.1)
shows that the curl of E
can be rewritten as
!
~ = − ∂Ez ~j =
∇×E
∂x
!
∂By ~
j
∂t
(5.6)
5.2 Electric Field Due to Magnetic Field
In the steady-state, the magnetic flux density around a long, thin conductor is
shown as
~ = µ0 µr i
B
2πr
(5.7)
where i is the current through the conductor, and r is the distance from the
conductor to the point of observation. Assume the current is a sinusoidal waveform i = i0 sin(ωt), with i0 being the amplitude of the current waveform, and
25
assume that, as in the coordinate system described previously, any distance from
the conductor is strictly along the x axis. If it is assumed that at extremely low
frequencies, such as the 50 and 60 hertz commonly used in power transmission,
the steady-state relation between magnetic flux density and current can be used,
then this is written as
~ = µ0 µr i0 sin(ωt) = By sin(ωt)
B
2πx
(5.8)
~ is shown as
Thus the time derivative of B
∂By
∂t
!
= By cos(ωt)
(5.9)
Combining this with equations (5.6) and (5.8) leads to the equation
−∂Ez
∂x
!
= By cos(ωt) =
µ0 µr i0
cos(ωt)
2πx
(5.10)
~ which occurs
This shows that the maximum magnitude of the electric field E,
at ωt = 0 and has only a z axis component Ez , can be calculated as
Ez = −
µ0 µr i0
(ln x + C)
2π
(5.11)
In a material for which the relative magnetic permeability µr = 1, such as
seawater, and if the rms value of a sinusoidal current waveform is used rather than
26
the peak current, the electric field can be written as
Ez =
√
2(2 × 10−7 )irms (ln x + C)
where irms is the rms current and Ez is in volts per meter.
(5.12)
27
Chapter 6 – At DC Power
Using the equations developed in previous sections, the overall current density that
will exist around a marine power transmission cable can be evaluated for conditions
that may be encountered in actual installations. Different values for the current
density under various situations are examined here.
6.1 DC Current, Quiescent Water
~ = 0 in the sea water surrounding an undersea
At direct current, the electric field E
power cable in the presence of effective shielding and due to the Helmholtz double
layer effect at DC voltage. If the water around the cable is quiescent, then water
~ is still present. Under these
velocity ~u = 0 as well. The magnetic flux density B
conditions, equation (3.17) becomes
~jtotal = 0
(6.1)
Thus it is seen that there is no electric current in quiescent sea water surrounding a power transmission cable.
28
6.2 DC Current, Constant Velocity Moving Water
In the condition at which direct current flows in a power cable surrounded by sea
~ =0
water, which is moving at a constant velocity past the cable, electric field E
~ is present, and water moves
as described previously. The magnetic flux density B
~ at velocity ~u. In this case, the total current density equation (3.17)
through the B
becomes
~ + ∇ × P~ × ~u
~jtotal = σ ~u × B
(6.2)
If P~ is expanded to its form in equation (3.14), remembering that in the DC
~ = 0, then this equation can be rewritten as
case E
~ + ∇ × [0 χ ~u × B
~ ] × ~u
~jtotal = σ ~u × B
(6.3)
~ by the right-hand-rule, has a direction orthogonal to both
The vector (~u × B),
~ The cross product of this vector with the velocity vector ~u would then
~u and B.
~ and ~u, which lies in the same plane as B
~ and ~u,
be a vector orthogonal to (~u × B)
in a direction at a right angle to ~u.
6.3 DC Current, Quiescent Water, Moving Fish
~ in quiescent water, the effect is
If a fish moves through a magnetic flux density B
~ but in a different frame of
similar to that of sea water moving through the same B,
reference. Since the current in the power cable is DC, there is still no electric field
~ due to the voltage of the cable. It can be assumed that the electric conductivity
E
29
σ and the relative permittivity r (and thus χ) of the fish are the same as that
of seawater. This will lead to an over-estimation of the induced current jm (see
equation 3.16) and provide an upper boundary for the effects of its motion through
the magnetic field, giving a “worst-case” situation for consideration. The fish is
the mass in motion, so the velocity vector ~u represents the speed of the fish, rather
than that of the sea water, such that equation (6.3) is modified to
~ + ∇ × [0 χ ~uf ish × B
~ ] × ~uf ish
~jtotal = σ ~uf ish × B
(6.4)
In this case of a fish moving through the magnetic field, it will be ions within the
body of the fish which are moving in an ionic current, and which polarize to give the
current density from moving magnetization seen in equation (3.16). Therefore a
current would flow within the fish’s body; this implies a potential difference across
the fish, and an accompanying electric field. It is believed that some fish, such
as sharks and rays, have sensory organs which are extremely sensitive to electric
fields, and are used to locate prey by the electric field produced by neurological
functions [7] It is possible that this ∆V across the fish would be interpreted in the
~ field generated by a potential prey organism.
same way as an E
6.4 DC Current, Moving Water, Moving Fish
If both the water and the fish are moving, the motion of each contributes to the
total current density. There will be a current density ~j in the seawater due to the
30
velocity of the water, and also a ~j in the body of the fish due to its motion through
~ and E
~ fields. This equates to a summation of equations 6.3 and 6.4, and
the B
becomes
~ + ~uf ish × B
~ +
~jtotal = σ ~u × B
~ ] × ~u
∇ × [0 χ ~u × B
~ ] × ~uf ish
∇ × [0 χ ~uf ish × B
+
(6.5)
Here, ~u with no subscript refers to the velocity of the seawater, while ~uf ish
refers to the velocity of the fish. It is again assumed that the conductivity σ and
relative permittivity r of the fish are equal to those of the surrounding seawater.
31
Chapter 7 – At AC Power
When an undersea line carries an alternating electric current, the time-varying
magnetic field will induce an electric field in its vicinity. This introduces an additional element above what is seen in the direct current case. Here, equations for
the total current density seen around the marine power cable in different cases are
developed.
7.1 AC Current, Quiescent Water
In quiescent water, velocity of the water, ~u, is zero. Electric field due to voltage
on the conductor is still zero; however, at alternating current, the time-varying
~
magnetic field will induce an electric field. Therefore, there is an electric field E
present in the seawater around the power cable. The equation for the total current
density in the water becomes
~
~jtotal = σ E
~ is solely that electric field induced from the time-varying B.
~
where E
(7.1)
32
7.2 AC Current, Constant Velocity Moving Water
In the case in which the seawater is moving at a constant velocity ~u past a conduc~ as described
tor carrying an alternating current, there will be an electric field E
previously. The equation for total current density, equation 3.17, is applicable. It
can be rewritten by expanding the polarization P~ , such that its form becomes
~ + ~u × B
~ + ∇ × [0 χ E
~ + ~u × B
~ ] × ~u
~jtotal = σ E
(7.2)
7.3 AC Current, Quiescent Water, Moving Fish
If the velocity of the seawater ~u = 0, and a fish swims through the vicinity of
a power transmission cable, the effect will be much as if the seawater were itself
moving. As discussed previously, if it is assumed that the electric conductivity σ
and the relative permittivity r of the body of the fish have the same values as
those of seawater, then current density exists around an alternating current power
cable as expressed in equation 7.3.
~ + ~uf ish × B
~ ] × ~uf ish
~ + ~uf ish × B
~ + ∇ × [0 χ E
~jtotal = σ E
(7.3)
In this case, the velocity vector is that of the moving fish, rather than seawater,
~ is that induced by the changing
and so is referred to as ~uf ish . The electric field E
~ is the total magnetic flux density.
magnetic field, and B
33
7.4 AC Current, Moving Water, Moving Fish
In a case in which both the water and the fish are moving, the motion of each
contributes to the total current density. There will be a current density ~j in the
seawater due to the velocity of the water, and also a ~j in the body of the fish due
to its own motion. Unlike in the direct current case, there will also be an electric
field present. This equates to a summation of equations 7.2 and 7.3, and becomes
~ + σ ~u × B
~ + ~uf ish × B
~ +
~jtotal = 2σ E
~ + ~u × B
~ ] × ~u
∇ × [0 χ E
~ + ~uf ish × B
~ ] × ~uf ish
∇ × [0 χ E
+
(7.4)
In this equation, ~u again refers to the velocity of the seawater, while ~uf ish is
the velocity of the fish. It is again assumed that the conductivity σ and relative
permittivity r of the fish are equal to those of the surrounding seawater.
34
Chapter 8 – Experimental Results
The equations introduced previously for total current density in seawater around
an alternating current undersea power cable depend on knowing the electric field
~ that exists around the cable. The method discussed in chapter 5 will give a firstE
order approximation of this electric field. Physical experiments were conducted to
~
validate this approximation of E.
The test experiments were conducted using a plastic container to hold the salt
water. The primary conductor used was a 10 AWG stranded copper wire, which
was run through holes in the sides of the container. This allowed the current to
be only in a single direction, with no vertical component from the wire having
to run up the side of the necessarily finite walls. The container was shielded on
the outside with aluminum foil; coverage was nearly complete, covering bottom,
sides, and top, and noise was minimized with the shielding in place. The testing
configuration is illustrated in Figure 8.1
The container was initially filled with deionized water. Table salt was added in
a 3.5% weight-to-volume ratio to the water; salinity was then verified as 35 parts
per thousand (ppt) with a Vernier LabQuest salinity meter. If significant time
passed between tests, such as when beginning a new day of tests after the salt
water was allowed to sit overnight, the salinity was re-checked with the salinity
meter, and adjustments were made to bring the solution back to 35 ppt.
35
Figure 8.1: Illustration of experimental test configuration.
The primary conductor wire was powered by a variable AC power supply. Two
high power variable resistors in parallel served as the load in the primary circuit.
Voltage was varied from approximately 5 to 36 volts, root-mean-square (rms).
Supplied current ranged from approximately 2 to about 9 amperes rms.
Voltage in the salt water bath was measured using two Ag/AgCl chloride electrodes, housed within glass tubes, with the bottom surface of the tube being porous
glass. The Ag/AgCl electrodes allow the voltage in the water to be measured more
accurately without being affected by ionic currents. The encasing of the electrodes
36
in a tube, and making the connection with the seawater using a salt bridge across
the porous glass surface, eliminates the potential for the formation of streaming
potentials, which improves the sensitivity of the device. The use of these electrodes
for these applications is recommended in several publications. [20] [21]
These electrodes were connected to a Tektronix DPO 7054 oscilloscope for
observation of the potential difference between the two leads. An example of data
measured with the oscilloscope is shown in Figure 8.2.
Figure 8.2: Example voltage waveform as recorded by Tektronix DPO 7054 Oscilloscope
37
The electrodes were placed at fixed locations in the salt water bath, with most
of the glass housing submerged. Leads from the electrodes to the oscilloscope were
shielded to minimize noise. Data from the oscilloscope were low-pass filtered in
Matlab to isolate the 60 Hz frequency used in the primary conductor. An example
of the filtered data is shown in Figure 8.3.
Figure 8.3: Example of data after filtering by Matlab. The blue points represent
the raw data; the red points are the data after filtering has been done. A strong
60 Hz sinusoidal signal is represented.
38
8.1 Varying Voltage
If the Helmholtz double layer opposes the electric field due to the voltage placed
on the power cable, it is expected that very little electric field would be seen in
the bulk salt water. The only significant contributor to electric field in the water
should be the E field induced by the time-varying magnetic flux density B.
To verify this, tests were performed in which an alternating current of 5 amperes
rms was run through the primary conductor. Two Ag/AgCl leads were placed
approximately 3 mm from the conductor, separated from each other by 10 cm,
and the potential difference between them was measured. The source voltage and
resistance of the load were changed in the different tests, such that the current
always remained a constant 5 amperes rms while the voltage varied.
8.1.1 Water Not Grounded
Tests with varying voltage and constant current were performed in which the salt
water bath was not grounded and the voltage was allowed to float. As described, in
each test a 5 ampere rms current was passed through the primary conductor. Various voltages were applied, thereby changing the voltage present at the conductor.
The data are illustrated in Figure 8.4.
39
Varying source voltage, constant 5 amps,
water not grounded
8
V at lead s (millivo lts)
7
f(x) = 0.21x ­ 0.06
R² = 1.00
6
5
4
3
2
1
0
5
10
15
20
25
30
35
40
Vo ltag e at source
Ung rou nd ed d ata
Line ar Reg res s ion for Un g rou nd ed data
Figure 8.4: Data for tests in which current was held constant, while the voltage
was varied. There was no ground to the water. Line fit with R2 = 1 is shown.
8.1.2 Water Grounded
Tests with varying voltage and constant current were performed in which the salt
water bath was grounded by placing a wire lead into the water, which was then
attached to ground. The data for these tests are illustrated in Figure 8.5
40
Varying source voltage, constant 5 amps, grounded water
V at lead s (millivo lts)
1
0 .9 5
f(x) = 0.005x + 0.790
R² = 0.800
0.9
0 .8 5
0.8
0.75
5
10
15
20
25
30
35
40
Vo ltag e at so urce
Gro un de d da ta
Line ar Regres s io n fo r Gro und e d d a ta
Figure 8.5: Data for tests in which current was held constant, while the voltage
was varied. A ground was connected to the water. Line fit with R2 = 0.8 is shown.
8.1.3 Discussion of Varying Voltage Results
When the salt water was not grounded, the measured voltage at the Ag/AgCl
leads showed a clear positive linear relationship with the voltage applied to the
primary conductor, as seen in Figure 8.4. When the salt water was grounded,
as shown in Figure 8.5, the measured voltage at the Ag/AgCl leads still showed
a positive linear relationship with the source voltage. However, the magnitude
was considerably lower than in the case with ungrounded water. If the two are
compared directly on the same scale, as shown in Figure 8.6, it can be seen that
41
the grounded test case data appear nearly constant.
Varying source voltage, constant 5 amps
Ungrounded and grounded data
8
f(x) = 0.21x ­ 0.06
R² = 1.00
V at lead s (millivo lts)
7
6
5
4
3
f(x) = 0.005x + 0.790
R² = 0.800
2
1
0
5
10
15
20
25
30
35
40
Vo ltag e at source
Ungro un de d da ta
Lin ea r Reg res s ion fo r Ung roun d ed da ta
Gro un de d da ta
Lin ea r Reg res s ion for Gro un de d da ta
Figure 8.6: Data for tests in which current was held constant, while the voltage
was varied. Results are shown for cases in which the salt water was grounded and
ungrounded. Line fits with R2 values are shown.
A possible explanation for this difference in behavior between the grounded and
ungrounded water is described here. When the Helmholtz double layer forms at the
surface of the primary wire insulation, a strong electric field is formed. Within the
double layer, the potential drops from the surface voltage of the primary conducting
wire to the voltage of the bulk water. The “ungrounded” case yields a measurement
that follows (or floats with) the energized conductor. The signal measured is
therefore not due to the electric field induced by the applied magnetic field, but
42
rather due to the applied voltage. In the “grounded case,” the measurement is
no longer allowed to float with the energized conductor and thus the potential
difference sensed by the oscilloscope is now truly due to the electric field induced
by the changing magnetic field present.
8.2 Varying Current
If the Helmholtz double layer near the surface of the conductor eliminates most of
the electric field due to voltage on the conductor past the very small area of the
double layer, then the only significant source of electric field should be from the
time-varying magnetic flux density B.
To verify this, tests were conducted in which the 60 Hz alternating voltage was
held at a constant 16 volts rms. The resistance of the load was varied so that the
current flowing through the primary conductor changed. Two Ag/AgCl leads were
placed approximately 3 mm from the conductor, with a 10 cm separation between
them. The potential difference between the two leads was measured.
8.2.1 Water Not Grounded
Tests were performed in which no ground was attached to the salt water, so that
the voltage of the water floated. Voltage for all data points was with a constant
16 volts rms. Current was varied, and voltage was measured at the two leads
placed into the water. Figure 8.7 shows results from two separate testing sessions,
43
performed on different days. The data points show a roughly linear trend, though
the R2 values of 0.57 and 0.62 are rather weak.
Source voltage constant 16 Volts rms,
water not grounded
2.3
f(x) = ­0.01x + 2.28
R² = 0.62
V at lead s (millivo lts)
2 .2 5
2.2
2.15
2 .1
f(x) = 0.01x + 2.11
R² = 0.57
2 .0 5
2
1
2
3
4
5
6
7
8
9
10
Amps in p rimary co nd ucto r
Ungroun d ed Data Set 1
Line ar Reg res s ion fo r Ung rou nd ed Data Set 1
Ung rou nded Data Set 2
Lin ea r Regre s s ion fo r Un ground e d Data Set 2
Figure 8.7: Data for tests in which voltage was held constant, while the current
was varied. Results for two different tests with the water ungrounded are shown.
Line fits with R2 values are shown.
8.2.2 Water Grounded
Tests were performed in which a grounded wire was placed into the salt water bath,
such that the voltage of the water was held to ground. Results are illustrated in
Figure 8.8, showing a strong linear trend with R2 = 0.997.
44
Source voltage constant 16 Vrms, varying current
grounded water
1.4 00
V at leads (millivo lts)
1.2 00
f(x) = 0.140x + 0.156
R² = 0.997
1.0 00
0 .800
0 .600
0 .400
0 .200
0 .000
1
2
3
4
5
6
7
8
9
Amp s in p rimary co nd ucto r
Grou n ded data
Lin ea r Regre s s io n fo r Grou nd ed d ata
Figure 8.8: Data for tests in which voltage was held constant, while the current
was varied. Results shown for tests in which the water was grounded. Line fits
with R2 = 0.997 is shown.
8.2.3 Discussion of Varying Current Results
When the water was not grounded, and a varying current passed through the primary conductor, the voltage measured at the leads was somewhat erratic. However,
it should be noted that the change in magnitude between data points was quite
small, varying by no more than approximately 15 millivolts. When compared with
the data from tests in which the water was grounded, as illustrated in Figure 8.9,
it can be observed that the grounded data has a more definite linear trend, with a
45
stronger coefficient of determination of R2 = 0.997. It is reasonable to surmise that
Source voltage constant 16 Volts rms,
Ungrounded and grounded data
V at lead s (millivo lts)
2 .50 0
2 .00 0
1.5 0 0
1.0 0 0
f(x) = 0.140x + 0.156
R² = 0.997
0 .50 0
0 .00 0
1
2
3
4
5
6
7
8
9
10
Amp s in p rimary co nd ucto r
Un groun de d Data Se t 1
Ung roun ded Da ta Set 2
Grou n ded da ta
Line ar Reg res s ion fo r Gro und e d data
Figure 8.9: Data for tests in which voltage was held constant, while the current
was varied. Results for tests with ungrounded water, as well as with the water
grounded, are included. The grounded data can be observed to have a more definite
linear trend than the ungrounded.
the small differences in data points from the ungrounded water tests are due to
a combination of experimental error and the variability that seems inherent when
the voltage of the salt water is allowed to float, while the grounded tests provide
a more accurate picture of response in an actual ocean environment.
46
8.3 Experimental Field-Deployable Magnetometer
A device was constructed to be used to measure magnetic field in an actual in situ
field test environment. A digital Honeywell HMR2300 magnetometer was enclosed
in a custom-designed housing constructed of 6-inch PVC pipe, which is highly
resistant to corrosion and capable of withstanding moderate pressure. The EBOX
2300, a very small, low-power computer, was used for control of the magnetometer
and recording of data. Custom control software was written to interface between
the computer and the HMR2300. The enclosure also contained a battery pack to
power the magnetometer and the control computer.
An end cap with double o-rings was used to seal the enclosure once all hardware
was in place. No leads were run from the interior to the exterior of the enclosure,
and no potential leak points existed except for the o-ring sealed end cap. According
to specifications for the PVC pipe used for the enclosure, it should be capable of
withstanding pressure at a depth of 100 feet or more. The enclosure was not
pressure tested, so the exact capability of the o-ring seals is not known.
Throughout 2008, work was done on a collaborative project between the energy
systems research group of Oregon State University, Columbia Power Technologies
and the U.S. Navy. A buoy for generating electricity from the heaving motion
of ocean waves was designed and built, and was deployed between 19 September
and 22 September. During this deployment, the magnetometer described here was
deployed to measure the magnetic field created around the buoy’s power take off
cable.
47
The power take off cable was attached to the buoy. The cable ran from the
buoy to the monitoring vessel, where it was attached to a power analysis and
data acquisition device. Floats were attached to the cable at intervals, so that the
cable floated on the surface of the water. In order to keep the magnetometer in
the same location relative to the power take off cable, the magnetometer housing
was strapped to the cable, parallel to the cable in the long axis direction of the
housing. The cable was placed inside a four foot length of PVC pipe, which had
an approximately 140◦ arc of material removed down its entire length. In this
way, the cable was held straight, to ensure the magnetic field around it would be
uniform along the length of the housing. To maintain a constant distance between
the magnetometer and the cable, spacers were placed between the housing and
the power take off cable. Three different lengths of spacers were used: the first
set of spacers was 6 inches long; the second was 12 inches long, and the third
was 24 inches. The distance from the outside of the enclosure to the sensor in the
magnetometer itself was approximately 3 inches. Therefore, the spacers provided a
distance from sensor to power take off cable of approximately 9, 15, and 27 inches,
respectively. Measurements were taken with each length of spacer placed between
the magnetometer enclosure and the power take off cable.
The instrument was not calibrated; therefore the captured data is preliminary,
and calibrated data is considered as part of the future work.
48
Chapter 9 – Simulation
COMSOL Multiphysics was used to create a model of the 10 AWG wire used as
the primary conductor in the physical experiments. Simulations were run using
the electric current values used in physical testing, and the resulting electric and
magnetic field were observed. Results of the simulations were compared to those
seen in experimental testing and those predicted by the analytical model.
9.1 Magnetic Field
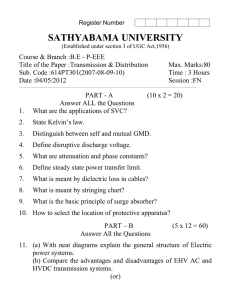
The COMSOL model was solved for a current of 6.31 amperes rms in the primary
conductor. A cross section of magnetic flux density values was taken, from the
center of the conductor outward in the horizontal (x axis) direction. Values for
B at all the same x values were also calculated using the analytical model from
equation (5.12). COMSOL results showed a good match with the predicted values,
as illustrated in Figure 9.1.
Experimental data for magnetic flux density in the test environment were difficult to obtain. Physical restrictions of the magnetometer made measurements
awkward. Tests that were performed showed a B value approximately three orders of magnitude higher than values predicted analytically or seen in COMSOL
simulations.
49
−3
x 10
3
Max B field values from COMSOL vs analytical prediction
6.31 Amps rms in wire
2.5
B [tesla]
2
Analytical solution
1.5
← Surface of conductor
1
0.5
0
0
COMSOL data
0.001
0.002
0.003 0.004 0.005 0.006 0.007
Distance from center of wire [m]
0.008
0.009
0.01
Figure 9.1: COMSOL simulation results for magnetic flux density B using model
of 10 AWG primary conductor used in experiments compared to results predicted
by analytical model. The analytical solution is valid only beginning at the surface
of the conductor.
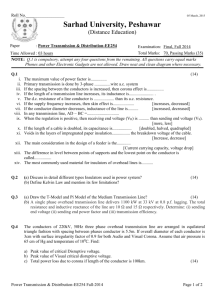
9.2 Electric Field
Electric field values from COMSOL simulation were in the same order of magnitude as values seen during testing, with measured E field being about triple the
magnitudes calculated by COMSOL. A comparison of maximum E field values
50
from COMSOL and testing is shown in Figure 9.2.
Electric Field values for COMSOL and Experimental
results at varied current
2.00 E­0 02
f(x) = 0.002x + 0.002
R² = 0.997
Electric Field [vo lts/m]
1.80 E­002
1.60 E­002
1.40 E­002
1.20 E­002
1.00 E­002
f(x) = 0.00056x ­ 0.00002
R² = 0.99935
8.00 E­0 03
6.00 E­0 03
4.00 E­0 03
2.00 E­0 03
0 .00E+0 00
1
2
3
4
5
6
7
8
9
Current in p rimary [amp s]
CO M SO L
Lin ea r Re gre s s io n fo r CO M SO L
Expe rimen ta l
Line ar Reg res s ion fo r Exp erimenta l
Figure 9.2: COMSOL simulation results for electric field E using model of 10
AWG primary conductor used in experiments compared to results of experimental
testing.
Both COMSOL and experimental results show a similar strong linear trend.
Electric field values predicted by equation (5.12) also showed a linear trend, with a
slope more similar to that of the experimental data. Analytically predicted values
for E field are shown in Figure 9.3 along with values from computer simulation
and experimental testing. The analytical model uses a boundary condition of E
approaching zero as distance from the conductor x approaches infinity, with a
resulting constant of integration of 7,000. Data points are at the same electric
51
current values as those used in Figure 9.2
Electric Field values for COMSOL, Experimental, and analytical results at varied current
Electric Field [vo lts/m]
2.00 E­00 2
f(x) = 0.002x + 0.002
R² = 0.997
1.50 E­0 02
1.00 E­0 02
f(x) = 0.00056x ­ 0.00002
R² = 0.99935
5.00 E­00 3
0 .0 0E+0 00
1
2
3
4
5
6
7
8
9
Current in p rimary [amp s]
CO M SO L
Lin e a r Re gre s s ion fo r CO M SO L
Pre dicte d va lu es
Line a r Reg res s ion fo r Pre dicted va lu es
Exp erime ntal
Lin e ar Re gre s s io n fo r Expe rimen ta l
Figure 9.3: Results for electric field E predicted with analytical solution, shown
with results from COMSOL simulation and results of experimental testing. The
points highlight the predicted values at the same current values used in COMSOL
simulation and physical testing.
52
9.3 Discussion of Simulation Results
The results seen in COMSOL simulation results for the magnetic flux density B
were very close to predicted values from the analytic solution. Measured values
for magnetic flux density were three orders of magnitude larger than experimental
measured values.
Simulation results for the electric field E were fairly close to experimental
values, differing by a factor of two or three but falling within the same order
of magnitude. Values predicted with the analytical model for electric field were
similar, especially to experimental data. The analytical model should be compared
again to experimental values in future work for further verification.
9.4 COMSOL Simulation of Three-Phase AC
A model was created in COMSOL for the LSFSGS-50 power cable. This is a cable
made to military specifications, commonly used for power transmission on board
military ships. It is watertight and can handle a moderate amount of power, being
rated for 110 amperes at 40◦ C in each of its four conductors. The LSFSGS-50
also has a layer of shielding between the conductors and the outer insulation layer.
It is a cable that would likely suit the needs of smaller-scale power generation
equipment, such as an array of wave energy devices, and was chosen as an example
of what could actually be encountered in an offshore power installation.
Three of the four conductors in the cable were used to transmit a three-phase
100 amp current, as the fourth would likely be used as a non-conducting neutral.
53
The model was solved for the resulting E field around the cable. The results do
not lend themselves to a simple graph; they are represented graphically in Figures
9.5, 9.6, 9.7, 9.8 and 9.9. Each figure represents a 45◦ progression in a single
sinusoid waveform cycle, showing how the electric field varies as the AC current
moves through one half cycle.
The maximum electric field seen in simulation was approximately 0.031 volts
per meter for a 100 ampere maximum current in the conductors. This equates to
an approximate electric field of 0.25 millivolts per 10 centimeters (the separation
between electrodes used in experimental testing) at a current of 8 amperes, which
compares well with experimental measurements.
54
Current in Each Phase of LSFSGS−50 COMSOL Simulation
150
Phase A
Phase B
Current [amperes]
100
50
0
−50
−100
Phase C
−150
0
45
90
135
180
225
Degrees
Figure 9.4: An illustration of the current flowing in each phase of the three-phase
COMSOL simulation. Each phase, A, B, and C, carries equal current, and is
phase shifted 120◦ from the other phases. Electric field is shown graphically in
other figures at 0◦ , 45◦ , 90◦ , 135◦ , and 180◦ in the sine wave function. These
points are indicated here by vertical lines on the x axis.
55
Figure 9.5: COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 0◦ in the sine wave function. The
top conductor is the neutral; the conductor on the right is the A phase; the bottom
conductor is phase B; and the conductor on the left is phase C.
56
Figure 9.6: COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 45◦ in the sine wave function. The
top conductor is the neutral; the conductor on the right is the A phase; the bottom
conductor is phase B; and the conductor on the left is phase C.
57
Figure 9.7: COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 90◦ in the sine wave function. The
top conductor is the neutral; the conductor on the right is the A phase; the bottom
conductor is phase B; and the conductor on the left is phase C.
58
Figure 9.8: COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 135◦ in the sine wave function. The
top conductor is the neutral; the conductor on the right is the A phase; the bottom
conductor is phase B; and the conductor on the left is phase C.
59
Figure 9.9: COMSOL results for electric field E around a 100 Amp magnitude
3-phase AC LSFSGS-50 cable in salt water, at 180◦ in the sine wave function. The
top conductor is the neutral; the conductor on the right is the A phase; the bottom
conductor is phase B; and the conductor on the left is phase C.
60
Chapter 10 – Conclusions
Experimental data in which voltage on the primary conductor was varied and current held constant showed a linear increasing relationship between applied source
voltage and voltage measured in the salt water, so long as the water was ungrounded. When the salt water was grounded, changing the source voltage had
little effect on the voltage seen in the water. As the power cable in this experiment was unshielded, this supports the hypothesis that the electric field is being
suppressed by the Helmholtz double layer.
In the test case in which voltage on the conductor was held constant and current
was varied, tests with an ungrounded water bath showed erratic voltage measurements in the water. Tests with grounded salt water showed a strong positive linear
relationship between current in the test conductor and voltage in the surrounding water. Combined with the results of the varying voltage tests, this supports
the hypothesis that electric field is being caused primarily by the time-varying
magnetic field.
The analytical solution for magnetic flux density closely matches data from
computer simulation. Neither the simulation nor analytical solution match measurements. However, accurate physical measurements were difficult to obtain.
Electric field measured values are in the same order of magnitude as simulated
values. This suggests that the three-phase simulation performed is reasonably ac-
61
curate. The analytical solution for electric field is close to experimental and simulated values, being an especially good match to experimental data. This suggests
that the analytical solution is strong. Continued verification through comparison
with additional experimental data in future work would be useful. Also, a clear,
approximately 0.14 millivolt per ampere of current in the primary conductor was
observed at a distance of 3 millimeters from the conductor experimental testing.
This gives a good indication of the magnitude of signals that will be measured in
future work.
Testing illustrated the importance of shielding test equipment in a laboratory environment to prevent noise from disrupting measurements. This work also
demonstrated the importance of magnetic shielding, which is more difficult to
accomplish. A less obvious lesson learned through these experiments was the necessity to ground the salt water bath in order to properly emulate a real-world
ocean environment.
10.1 Future Work
Work should continue on developing a calibrated field-deployable submarine magnetometer device for use in in situ field measurements. This would be a valuable
tool in further evaluation of magnetic fields in actual installation and testing environments.
Testing demonstrated the need for good shielding of test equipment, both for
electric and magnetic fields. It also illustrated the difficulties of obtaining precise
62
physical measurements without equipment that has been calibrated to a known
source of electric and magnetic fields. Future work should also use equipment
designed to allow precise spacing between measuring electrodes, and between the
primary conductor and the electrodes. It should also be able to change this spacing
while maintaining precision.
A shielded test environment in which both electric field, e.g., by use of a Faraday
cage, and magnetic field, through use of high permeability, low saturation material
walls, would be beneficial for accurate measurements.
63
Bibliography
[1] Ceto technology, 2008.
[2] Karim Wassef, Vasundara V. Varadan, and Vijay K. Varadan. Magnetic field
shielding concepts for power transmission lines. IEEE Journal of Magnetism,
34:649–654, May 1998.
[3] David Jiles. Introduction to Magnetism and Magnetic Materials. CRC Press,
Taylor & Francis Group, Boca Raton, Florida, USA, second edition, 1998.
[4] Nancy Wertheimer and Ed Leeper. Electrical wiring configurations and childhood cancer. American Journal of Epidemiology, 109(3):273–284, May 1979.
[5] Zenon Sienkiewicz. Biological effects of electromagnetic fields. Power Engineering Journal, pages 131–139, June 1998.
[6] Antonio B. S. Poleo, Helga F. Johannessen, and Morten Harboe Jr. High voltage direct current (hvdc) sea cables and sea electrodes: Effects on marine life.
Technical report, Department of Biology, University of Oslo, Oslo, Norway,
February 2001.
[7] Peter A. Valberg. Memorandum addressing electric and magnetic field (emf)
questions. Technical report, Cape Wind Energy Project, Nantucket Sound,
Massachusetts, USA, August 2005.
[8] Cowrie e-newsletter, March 2008.
[9] Centre for Marine and University of Liverpool Coastal Studies. A baseline
assessment of electromagnetic fields generated by offshore windfarm cables.
Technical Report COWRIE-EMF-01-2002, Collaborative Offshore Wind Research Into the Environment, UK, July 2003.
[10] A. B. Gill, I. Gloyne-Phillips, K. J. Neal, and J. A. Kimber. Cowrie 1.5
electromagnetic fields review. Technical Report COWRIE-EM FIELD 2-062004, Collaborative Offshore Wind Research Into the Environment, UK, July
2005.
64
[11] Andrew B. Gill, Yi Huang, Ian Gloyne-Philips, Julian Metcalfe, Victoria
Quayle, Joe Spencer, and Victoria Wearmouth. Cowrie 2.0 emf final report. Technical Report COWRIE-EMF-01-06, EP-2054-ABG, Collaborative
Offshore Wind Research Into the Environment, UK, March 2009.
[12] Kenneth L. Kaiser. Electromagnetic Compatibility Handbook. CRC Press,
Boca Raton, Florida, 2005.
[13] Russell K. Hobbie and Bradley J. Roth. Intermediate Physics for Medicine
and Biology. Springer Science + Business Media, New York, New York, 2007.
[14] John R. Apel. Principles of Ocean Physics. Academic Press, London, UK,
1987.
[15] Wolfgang Schmickler. Interfacial Electrochemistry. Oxford University Press,
New York, New York, 1996.
[16] Jacob N. Israelachvili. Intermolecular and Surface Forces. Academic Press,
London, UK, 1985.
[17] R. Morrow, D. R. McKenzie, and M. M. M. Bilek. The time-dependent development of electric double-layers in saline solutions. Journal of Physics D:
Applied Physics, 39(5):937+, March 2006.
[18] J. Duncan Glover and Mulukutla S. Sarma. Power System Analysis and Design. Brooks/Cole, Pacific Grove, CA, 2002.
[19] A. P. Sakis Meliopoulos. Power Systems Grounding and Transients: an Introduction. Marcel Dekker, Inc., New York, New York, 1988.
[20] S. C. Webb, S. C. Constable, C. S. Cox, and T. K. Deaton. A seafloor electric
field instrument. Journal of Geomagnetism and Geoelectricity, 37:1115–1129,
1985.
[21] G. Petiau and A. Dupis. Noise, temperature coefficient, and long term stability
of electrodes for telluric observations. Geophysical Prospecting, 28:792–804,
1980.