Research Journal of Applied Sciences, Engineering and Technology 4(16): 2748-2754, 2012 ISSN: 2040-7467
advertisement
: 2748-2754, 2012 ISSN: 2040-7467")
Research Journal of Applied Sciences, Engineering and Technology 4(16): 2748-2754, 2012
ISSN: 2040-7467
© Maxwell Scientific Organization, 2012
Submitted: March 26, 2012
Accepted: April 17, 2012
Published: August 15, 2012
Improved Fastslam2.0 Based on the H4 Filter for Intelligent Mobile Robot
1
Qi Zhang, 2Jiachen Ma and 1Qiang Liu
School of Astronautics, Harbin Institute of Technology, Harbin 15001, China
2
Department of Information Science and Engineering Harbin Institute of Technology
at Weihai, Weihai 264209, China
1
Abstract: This study proposes hybrid H4 Fast SLAM algorithm as a robust and effective SLAM solution. In
usual FastSLAM2.0, a priori knowledge of the process and the statistics of measurement noise are assumed to
be Gaussian motion disturbances. However, in most application these matrixes are unknown or can’t be
assumed as Gaussian motion disturbances. The main advantage of the H4 estimator is that it makes no
assumption about the disturbances and it has the ability which all conceivable disturbances can be satisfied. We
use the H4 filter to handle the process and measurement noise covariance matrices Qt and Rt. And the k-step
look-ahead proposal distribution is added to calculate importance weight of particles. Simulation results in
different environments and consistency of the proposed approach are presented, demonstrating the superiority
of the proposed approach.
Keywords: FastSLAM2.0, hybrid H4 FastSLAM, intelligent mobile robot, simultaneous localization and
mapping, the H4 filter
INTRODUCTION
The topic of navigation is one of the focused points
in the correlation technique of Intelligent Mobile Robot
(IMR). Simultaneous Localization and Mapping (SLAM)
in an unknown environment is an essential aspect of the
research for navigational technique (Habib et al., 1989).
The common formulation of the SLAM problem consists
of building some kind of world representation from the
sequence of data gathered by the robot, assuming no prior
information about the environment and simultaneously
localizing the robot using that representation. Building
maps is one of the fundamental tasks of mobile robots. In
the literature, the mobile robot mapping problem is often
referred to as the Simultaneous Localization and Mapping
(SLAM) problem (Dissanayake et al., 2000; Doucet et al.,
2000). It is considered to be a complex problem, because
for localization a robot needs a consistent map and for
acquiring a map a robot requires a good estimate of its
location.
The most popular solution to SLAM is the Extended
Kalman Filter SLAM (EKF-SLAM), which is a movesense-update cycle. At every step, the EKF computes an
estimation of a state vector x$ representing the sensor and
environment feature locations, together with the
covariance matrix P representing the error in the
estimation (Lina et al., 2008). Several applications of
EKF-SLAM have been developed for indoor applications,
outdoor applications, underwater applications and
underground applications (Bosse et al., 2002; Bailey,
2002; Williams et al., 2008; Thrun et al., 2003). However,
EKF-SLAM suffers from two major problems: the
computational complexity and data association (Thrun
et al., 2005). Particle filters have been applied to various
kinds of robotic state estimation problems including
localization, mapping, or data association (Slawomir
et al., 2009). Murphy (1999) was the first to present an
approach based on a Rao-Blackwellized particle filter for
learning grid maps. The first efficient approach for
mapping with Rao-Blackwellized particle filters was the
Fast-SLAM algorithm. Recently, FastSLAM2.0 algorithm
approach has been proposed as an alternative approach to
solve the SLAM problem. It uses a set of Kalman filters
to represent the map features conditioned on a sampled
robot trajectory. The particles are drawn from the
odometry motion model and weighed by the likelihood of
the observations. In FastSLAM2.0, particle filter is used
for the mobile robot position estimation and EKF is used
for the feature location's estimation.
There are two superiors in the feature of
FastSLAM2.0. One is the possibility to deal with multihypothesis association problem. The data association
decisions can be determined on a per-particle basis and
hence different particles can be associated with different
landmarks. The other advantage of FastSLAM2.0 over
EKF-SLAM is that the particle filter can cope with
nonlinear and non-Gaussian robot motion models,
whereas EKF approaches approximate such models via
linear functions. In all previous research on
FastSLAM2.0, a priori knowledge of the process and the
Corresponding Author: Qi Zhang, School of Astronautics, Harbin Institute of Technology, Harbin 15001, China
2748
Res. J. Appl. Sci. Eng. Technol., 4(16): 2748-2754, 2012
statistics of measurement noise is completely known,
which is assumed to be Gaussian motion disturbances.
However, in most application these matrixes are unknown
and can’t be assumed as Gaussian motion disturbances. In
another word, the incorrect matrixes Qt and Rt of the prior
knowledge may seriously degrade the performance of
EKF-SLAM.
To solve this problem, we proposed an approach
called hybrid H4 FastSLAM. The H4 filter is to solve the
incorrect matrixes Qt and Rt of the prior knowledge in
FastSLAM. H4 optimal estimator is based on the
maximum-likelihood and minimize the expected
prediction error energy, if we assume disturbances that are
“independent zero-mean Gaussian random variables”. The
idea of H4 is to come up with estimators that minimize (or
in the suboptimal case) the maximum energy gain from
the disturbances to the estimation errors. This will
guarantee that if the disturbances are small (in energy)
then the estimation errors will be as small as possible (in
energy), no matter what the disturbances are. In other
words the maximum energy gain is minimized over all
possible disturbances. Here is just the robustness of the H4
estimator because it makes no assumption about the
disturbances and it has the ability which all conceivable
disturbances can be satisfied. And the k-step look-ahead
proposal distribution to yield a more informed pose
estimate is used to the process of calculating importance
weight of particles (Slawomir et al., 2009). So the
proposed approach in this study which can handle the
nonlinear and non-Gaussian robot motion and
measurement models raises the performance of usual
FastSLAM2.0.
METHODOLOGY
Preliminaries:
FastSLAM based on rao-blackwellized particle filters:
FastSLAM based on Rao-blackwellized particle filters is
an efficient approach to estimate the robot pose s and
environmental features 8 at the same time, which means
it has to estimate p((st, 8)| zt, ut, nt). FastSLAM divides
estimation into two parts, which are EKF and Particle
Filter (PF), as shown in (1).
The general form of FastSLAM is:
(
) (
)
K
(
)
p st , λ z t , ut − 1 , nt = p st z t , ut − 1, nt ∏ p λk st , z t , ut − 1 , nt
1442443 k = 1 144424443
PF
(1)
EKF
where, PF and EKF are separately used in the process to
estimate the product of a posterior over robot pose p(st|zt,
ut!1, nt) and environmental features p(8k| s, zt, ut!1, nt), St
= {So, S1, ..., St} is the robot pose(path).
Landmark location estimation: In FastSLAM algorithm,
the posterior probability of robot poses and environmental
features is denoted as:
{
S t = s t , i ; µ1i , ∑ 1i , K , µ Ki , ∑
i
K
}
(2)
i
where,
i
i
S t , i = {S1i , S2i ,K, Sti } , mean : K and variance G K of
the kth environmental feature 8k are Gaussian distribution,
which is related to the ith sample. When nt = k, then:
(
p(λ
) (
,n )
p λnt = k st , z t , u t −1 , n t ∞ p zt λnt , st , z t −1 , u t −1 , n t
nt
st −1 , z t −1 , u t − 2
)
(3)
t −1
when nt … k, then:
(
) (
p λnt ≠ k st , z t , ut −1 , n t = p λk st −1 , z t −1 , ut − 2 , n t −1
)
(4)
Particle path estimation: FastSLAM employs a Particle
Filter (PF) for estimating the path posterior p(st|zt, ut!1, nt)
in (3). PF is one of applications about the problem of
robot pose estimation (localization). At each point in time,
both algorithms maintain a set of particles representing
the posterior p(st|zt, ut!1, nt), denoted St. Each particle St, [m]
, St represents an estimation of the robot’s path:
S t = {s t , [ m] } m = {s1[ m] , s2 [ m] ,K , st [ m] } m
(5)
We use the superscript notation [m] to refer to the
mth particle in the set. The particle set St is calculated
incrementally, from the set St!1 at time t!1, a robot control
ut and a measurement zt. First, each particle st, [m] in St!1,
is used to generate a probabilistic guess of the robot’s
pose at time t:
(
St [ m] ~ p St ut −1 , st −1[ m]
)
(6)
where, (6) is obtained by sampling from the probabilistic
motion model. This estimate is then added to a temporary
set of particles, along with the path st!1, [m]. Under the
assumption that the set of particles in St!1 is distributed
according to p(st| zt!1, ut, nt!1) (which is an asymptotically
correct approximation), the new particle is distributed
according to p(st| zt!1, ut, nt!1). This distribution is
commonly referred to as the proposal distribution of
particle filtering. After generating M particles in this way,
the new set St is obtained by sampling from the temporary
particle set. Each particle St,[m] is drawn (with
replacement) with a probability proportional to a so-called
importance factor Wt[m], which is calculated as follows
(Thrun, 2010):
2749
Res. J. Appl. Sci. Eng. Technol., 4(16): 2748-2754, 2012
Wt [ m] =
(
p st ,[ m] z t , ut , nt
(
)
p st ,[ m] z t − 1 , ut , nt − 1
Theorem 1 given (>0, if [Mk'k] is full rank, then
||Tk(F)||4<( exits when ›k, thus:
(7)
)
Pk−1 + HkT Hk − γ − 2 LTk Lk > 0
The exact calculation of (7) will be discussed further
below. The resulting sample set St is distributed according
to an approximation to the desired pose posterior p(st| zt,
ut, nt) an approximation which is correct as the number of
particles M goes to infinity. We also notice that only the
m]
most recent robot pose estimate St[−1
is used when
generating the particle set St. This will allows us to
silently “forget” all other pose estimates, rendering the
size of each particle independent of the time index t.
The H4 filter: The effect of kalman filter is to minimize
the variance of estimation error. The optimality of kalman
filter depends on the knowledge of the state space model
noise, which requires both process model noise and
measurement model noise process to be Gaussian (Sung
et al., 2008). If the noise statistics are unknown or unGaussian, then kalman filter is no longer optimal. In this
study, we use the H4 filtering algorithm (MohammadpourVelni and Yazdanpanah 2002), so that the effect of the
worst disturbance on the estimation is minimized. In H4
filter, consider the system state model:
Xk+1 = Mk Xk+'k Wk
yk = Hk Xk + Vk
][
⎧
P0 = E ⎨ X 0 − X$ 0 X 0 − X$ 0
⎩
]T ⎫⎬⎭
(9)
Define the filter error as:
ek = z$k − Lk X k
(10)
where z$k is the estimation of zk given the value of
observation {yk} and z$k = F(y0, y1, ..., yk). Lk is given
matrix and zk = Lk Xk is a mapping of the state Xk.
The H4 filtering is given as follow:
Given (>0, œ z$k = F(y0, y1, ..., yk) and ||Tk(F)||4 <(, then:
inf
sup
F X ,W ∈h ,V ∈h
0
2
2
ek
X 0 − X$ 0
where Pk is satisfy with recursion Riccati equation:
⎡ Hk ⎤
Pk +1 = Φ k Pk Φ −k 1 + Γ k Γ kT − Φ k Pk H kT LTk Re−,1k ⎢ ⎥ Pk Φ Tk
⎣ Lk ⎦
[
⎡ Hk ⎤
T T
⎢ L ⎥ Pk H k Lk
⎣ k⎦
0 ⎤
⎡I
Re , k = ⎢
2 ⎥ +
−
I⎦
γ
0
⎣
[
]
(13)
]
(14)
So X$ k can be calculated by:
(
X$ k + 1 = Φ k X$ k + Kk + 1 yk + 1 − Hk + 1Φ k X$ k
[
Kk + 1 = Pk + 1HkT+ 1 I + Hk + 1 Pk + 1KkT+ 1
]
)
−1
(15)
(16)
The hybrid H4 FastSLAM: Unlike traditional
FastSLAM, the hybrid H4 FastSLAM is based on the H4
filter, which consists of four parts: the Sampling Strategy
in H4 filter, the feature state estimation, the importance
weights calculation and adaptive re-sampling strategy. In
the last part of this section, we progress the consistency
analysis.
(8)
where, Mk, 'k and Hk are matrix with appropriate
dimensions. The matrix Wk, Vk are process and
measurement noise seperately. We assume the initial state
of system is X0 and X$ 0 is an estimation of X0. Given the
definition of initial estimation error variance matrix:
[
(12)
2
P0−1
2
2
+ Wk
2
+
2
Vk
2
2
<γ 2
Sampling strategy in H4 filtering: The particle filter in
the RBPF framework relies on importance sampling, so it
requires the design of proposal distributions that can
approximate the true posterior reasonably well (Kim
et al., 2008). In the SLAM problem, a lack of an
observation or multiple observations can happen
frequently. Several researchers have introduced the most
current observations into the proposal distribution and
have used some heuristic techniques to improve the
accuracy of the proposal distribution. However, the
performance of the methods and the quality of the
estimation depends on the correct a priori knowledge of
process Qt and measurement noise covariance matrice Rt.
In proposed approach, H4 filter instead of EKF is used to
solve this problem. To approximate the distribution using
H4 filter as following equations:
(11)
m
S$[ m] = f ⎛⎜⎝ st[ ] , ut ⎟⎞⎠
t +1
⎡ Ht ⎤
Pt[+m1] = Φ t Pt[ m] Φ t−1 + Γ t Γ tT − Φ t Pt[ m] H tT LTt Re−,1k ⎢ ⎥ Pt [ m] Φ Tt
⎣ Lt ⎦
[
0 ⎤
⎡I
Re, k = ⎢
2 ⎥+
γ
−
I⎦
0
⎣
2750
(17)
]
[
⎡ Ht ⎤ [ m] T T
⎢ L ⎥ pt Ht Lt
⎣ t⎦
]
(18)
(19)
Res. J. Appl. Sci. Eng. Technol., 4(16): 2748-2754, 2012
m
m
m
m
st[ ] = Φ t s$t[ ] + Kt[+1] ⎜⎛⎝ yt +1 − Ht +1Φ t s$t[ ] ⎟⎞⎠
−1
m
m
m
Kt[+1] = pt[ +1] HtT+1 ⎡⎢ I + Ht +1 Pt[+1] HtT+1 ⎤⎥
⎣
µn[ m, ] t = µn[ m, ] + Kt ( zt − z$t )
∑[
m]
nt , t
(21)
⎦
m
m
m
st[ ] N ⎛⎜⎝ s$t[ ] , pt[ ] ⎞⎟⎠
(22)
This approach produces accurate prediction in each
update step and is important in estimating the vehicle state
accurately.
Feature state estimation-based H4 filter: In hybrid H4
FastSLAM, we us H4 to represent the posterior landmark
estimates p(8k | st, zt, ut!1, nt). In fact FastSLAM2.0,
mean µn[m,t ] and variance ∑ [nm,t] of environmental feature 8k
of posterior landmark are added to the temporary particle
set, along with the new pose St (Havangi et al., 2011). The
update depends on the landmark n at the time t.When the
observed feature nt = k, then:
(
) (
)(
p λnt st ,[ m] , z t , nt = η p z t λnt , st ,[ m] , z t − 1 , nt p λnt st ,[ m] , z t − 1 , nt
[ m]
nt ,t − 1
−
∑[
m]
nt ,t − 1
)
[G
]
⎡ Gθ n ⎤
I Re−,1t ⎢ t ⎥ ∑
⎣ I ⎦
[ m]
θ nt
[ m]
nt , t − 1
[G
T
θ nt
I
]
[ m]
nt ,t − 1
(30)
(31)
Calculating importance weight: In this study, we use the
re-sampling strategy-based Look-ahead proposals
approach to compute the importance weights of particles
(Slawomir et al., 2009). The re-sampling strategy-based
Look-ahead proposals approach is given as follows:
(
t+k
)
(
p st :t + k st −1 ,ut :t + k , zt:t + k = η ' ∏ p zτ sτ
(
p sτ sτ −1, uτ
τ =t
)
Here, η ' = p(zt:t + k st −1, ut:t + k )
−1
t+k
)∏
τ =t
(32)
is the Bayes normalizer.
A particle approximation of Eq. (32) can be obtained by
sampling a sequence of poses according to the sequence
of motion commands:
(23)
⎧ [i ] t + k ⎛ i [i ]
⎪ st:t + k ∏ p⎜⎝ sτ[ ] sτ −1, uτ ⎞⎟⎠
⎪⎪
τ =t
⎨
t+k
⎪ [i ]
⎛
[i ] ⎞
⎪ vt :t + k ∞ ∏ p⎜⎝ zτ sτ ⎟⎠
⎪⎩
τ =t
[ m]
where, the Gaussian distribution of mean µn , t and
variance ∑ [nm, t] represented the probalility p(8k | st, zt,
ut!1, nt) at the time t!1.When the new estimate at the time
t is available, the H4 FastSLAM approximates the
measurement function g by the following first order
Taylor expansion:
m
m
m
m
m
m
g ⎜⎛⎝ λnt , st[ ] ⎟⎞⎠ = g ⎜⎛⎝ µn[ ,t ]−1 , st[ ] ⎟⎞⎠ + g ' ⎜⎛⎝ µn[ ,t ]− 1, st[ ] ⎟⎞⎠ ⎜⎛⎝ λnt − µn[ ,t ]−1⎟⎞⎠
144244
3 1442443
Z$t[ m]
=∑
0 ⎤ ⎡ Gθ nt ⎤
⎡R
Re ,t = ⎢
= ⎢
⎥
γI ⎥⎦ ⎣ I ⎦ ∑
0
−
⎣
The state of each particle is sampled:
(29)
t t −1
t
(20)
(24)
Gt[ m]
The posterior of landmark subjects to indeed
Gaussian by this first order Taylor expansion. The
mean µn[m,t ] and variance ∑ [nm,t] are obtained using the
following measurement update (Grisetti et al., 2007):
(33)
So,
(
p st st − 1, ut :t + k ,zt:t + k
)
st[ ] , v$t[ ]
i
i
(34)
To compute the weight of the sample xt[i] one has to
traverse the tree from the leaves at time t+k up to the root
at time t by summing up the weights of the leaves. Thus,
the sample st[i] receives a weight v$t[i ] which is the sum of
the weights of its successors at time t+k:
M
h
i
v$t[ ] = ∑ δih × vt[:t ]+ k
(35)
h =1
m
z$t = g ⎛⎜⎝ st[ ] , µn ,t − 1⎞⎟⎠
(25)
⎧1 if particlei at timet is parent
⎪
of particlehat timet + k
⎪0
otherwise
⎩
(36)
δih = ⎨
(
Gθ n = ∇ θ n g st ,θnt
t
t
Zn,t = Gθ n
)
m
st = st[ m] ;θ nt = µ n[ t ,]t −1
[ m]
t
∑ n ,t −1 Gθ
t
m
Kt = ∑ [n ,]t − 1GθTn Zn−,1t
t
t
(26)
The set S = ⎧⎨
⎩
T
nt
+ Rt
(27)
(28)
i
i ⎫
st[ ] , v$t[ ] ⎬
⎭
is a sampled representation of
Look-ahead proposals distribution. An approximation of
the true posterior p⎛⎜ s[ j ] s[ j ] , z , u ⎞⎟ is recovered by
⎝
t
t
t −1 t
⎠
assigning to each newly drawn sample St[j] with a weight
2751
Res. J. Appl. Sci. Eng. Technol., 4(16): 2748-2754, 2012
wt[j] that corrects the bias introduced by the proposal
distribution, which is given by:
∞
⎛ [ j] [ j]
⎞
p⎜ st st −1 , zt :t + k , ut :t + k ⎟
⎝
⎠
⎛
[ j]⎞
p zt st ⎟
⎠
⎜
[ j] ⎝
∞ wt −1
⎛ [ j] [ j]
⎞
p⎜ st st − 1, zt , ut ⎟
⎝
⎠
[ j]
wt −1
(37)
[ j]
v$t
Adaptive resampling strategy: Another aspect that has
a major influence on the performance of a SLAM is the
re-sampling strategy. In the progress of re-sampling,
particles with a low importance weight w(i) are typically
replaced by samples with a high weight. The re-sampling
technique used the effective number of particles as a
criterion. One side, re-sampling strategy has to be
necessary since only a finite number of particles are used
to approximate the target distribution and the other side,
the re-sampling step can remove good samples from the
filter which can lead to particle impoverishment.
Accordingly, it is important to find a criterion for
deciding when to perform the re-sampling step. Liu
(1996) introduced the so-called effective sample size to
estimate how well the current particle set represents the
target posterior. In this study, we compute this quantity
using the formulation as:
N eff =
1
∑ iN=1(w~ (i ) )
2
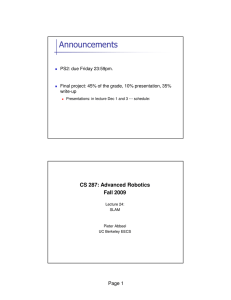
In this section, we use two experiments to
demonstrate the presented approach can be applied in both
indoor and outdoor scenarios. The state of the robot can
be modeled as (x, y, 2) that (x, y) is the position of robot
in the Cartesian coordinates and 2 is the orientation of
robot in the global environment. The moving speed of
robot is 1.2 m/s and data association is assumed known.
To illustrate the performance of the proposed approach in
this study, we use two environments which one is with 30
landmarks included in the smaller environment and the
other is with 50 landmarks included in the larger
environment. Figure 1 and 2 show the results of the
comparison between the proposed approach in this study
and FastSLAM2.0. It is very clearly to be seen that the
proposed algorithm is better than FastSLAM2.0. The
preferable location can be realized even the landmarks are
distributed uniformly in Fig. 1. More general situation is
showed in Fig. 2 where 50 landmarks are not distributed
uniformly. For another words, in the proposed algorithm,
the estimations of robot path and environmental landmark
coincide with the actual path and the landmarks, as
closely as possible. Figure 3 shows the comparison
Proposed SLAM
25
FAST 2.0
20
15
10
5
0
-5
-10
-15
-20
-25
-25 -20 -15 -10 -5
0
5
X position (m)
Y position (m)
[ j]
wt
SIMULATIONS AND EXPERIMENTAL
RESULTS
(38)
where, w~(i ) refers to the normalized weight of ith particle.
We use Nthd to control the resampling process. Nthd is the
pre-defined threshold and the resampling process occurs
when Neff < Nthd. Usually, Nthd is known and the value is
0.6M, where M is the number of particles.
Y position (m)
D2
χr2,1− α
(39)
where, D2 = (s! s$ )T P-1(s! s$ ), r = dim(s) and " is the
desired significance level (usually " = 0.05). It is desired
for good consistency if CI#1. Computation load is the
other factor to evaluate the performance of the proposed
SLAM algorithm especially in large scale environments.
15
20
25
Fig. 1: The results of the comparison between the proposed
approach and FastSLAM2.0 in small space with 30
landmarks
Consistency analysis: Consistency analysis is one of the
important criterions of a SLAM algorithm in large scale
environments. Hence we use chi-square test to check the
consistency of the robot pose here. The consistency index
is shown as, (Lina et al., 2008):
CI =
10
Proposed SLAM
FAST 2.0
50
40
30
20
10
0
-10
-20
-30
-40
-50
10
-50 -40 -30 -20 -10
0
X position (m)
20
30
40
50
Fig. 2: The results of the comparison between the proposed
approach and FastSLAM2.0 in large space with 50
landmarks
2752
Res. J. Appl. Sci. Eng. Technol., 4(16): 2748-2754, 2012
CI
1.0
0.5
0
40
50
60
70
80
The number of marks
90
100
Fig. 3: The consistency of analysis for different size of the
environment
between the standard FastSLAM2.0 and the proposed
approach in this study for different scales of the
environments in terms of and CI. We use the number of
landmarks from 0 to 100.
CONCLUSION
In this study, we propose the hybrid H4 FastSLAM
algorithm as a robust and effective SLAM solution, which
consists of the H4 filter and the k-step look-ahead
proposal distribution. However, the robustness of the H4
estimator is that it makes no assumption about the
disturbances and it has the ability which all conceivable
disturbances can be satisfied. The main advantage of the
proposed method is that it does not require a priori
knowledge of the system which are the process and
measurement noise covariance matrices Qt and Rt,
respectively. The k-step look-ahead proposal distribution
is used to calculate importance weight of particles. We
conclude from the results in different environments with
different number of landmarks that the proposed
algorithm yields significantly more accurate and robust
estimation results compared with the FastSLAM2.0.
Additionally, we analyze the consistency of the proposed
approach is better than that of FastSLAM2.0.
ACKNOWLEDGMENT
This study is supported by the study fund of Harbin
Institute of technology at Weihai (HIT (WH) 201103 and
IMVQ02020003). The authors also gratefully
acknowledge the helpful comments and suggestions of the
reviewers, which have improved the presentation.
REFERENCES
Bailey, T., 2002. Mobile robot localization and mapping
in extensive outdoor environments. Ph.D. Thesis,
University Sydney, Sydney, NSW, Australia, pp:
29-35.
Bosse, M., J. Leonard and S. Teller, 2002. Large-scale
CML using a network of multiple local maps. In
Workshop Notes of the ICRA Workshop on
Concurrent, Washington, D.C., pp: 113-119.
Doucet, A., J.F.G. de Freitas, K. Murphy and S. Russel,
2000. Rao-blackwellized partcile filtering for
dynamic bayesian networks. In Proceeding of the
Conference on Uncertainty in Artificial Intelligence
(UAI), pp: 176-183.
Dissanayake, G., H. Durrant-Whyte and T. Bailey, 2000.
A Computationally Efficient Solution to the
Simultaneous Localisation and Map Building
Efficient Solution to the Simultaneous Localisation
and Map Building Automation. (ICRA), San
Francisco, CA, USA, pp: 1009-1014.
Grisetti, G., C. Stachniss and W.Burgard, 2007. Improved
techniques for grid mapping with rao-blackwellized
particle filters. IEEE T. Robot., 23(1): 34-46.
Havangi, R., M.A. Nekoui, H. Taghirad and M.
Teshnehlab, 2011. The H4 FastSLAM framework.
2011 IEEE International Conference on:
Mechatronics (ICM), pp: 481-486.
Habib, M.K. and S. Yuta, 1989. Development and
implementation of navigation system for an
autonomous mobile robot working in a building
environment with its real time application. 15th
Annual Conference of IEEE, Industrial Electronics
Society, pp: 613-622.
Kim, C., R. Sakthivel and W.K. Chung, 2008. Unscented
Fastslam: A robust and efficient solution to the slam
problem. IEEE T. Robot., Vol 808-820.
Lina, M.P., D.T. Juan and N. Jose, 2008. Divide and
conquer: EKF SLAM in O(n). IEEE T. Robot., 24:
1107-1120.
Liu, J.S., 1996. Metropolized independent sampling with
comparisons to rejection sampling and importance
sampling. J. Syst. Software, 83(4): 113-119.
Mohammadpour-Velni, J. and M.J. Yazdanpanah, 2002.
Mixed H4; estimation: Posteriori and priori adaptive
filtering. Communications. IEEE 2002 International
Conference on: Circuits and Systems and West Sino
Expositions, pp: 1045-1049.
Murphy, R., 1999. Bayesian map learning in dynamic
environments. In Proceedings of the Conference on
Neural Information Processing Systems, Denver, CO,
USA, pp: 1015-1021.
Slawomir, G., P. Christian and G. Giorgio, 2009.
Look-ahead proposals for robust grid-based SLAM
with rao-blackwellized particle filters. Int. J. Robot.
Res., pp: 182-191.
Sung, H.A., C. Jinwoo and L.D. Nakju, 2008. A practical
approach for EKF-SLAM in an indoor environment:
Fusing ultrasonic sensors and stereo camera. Auton.
Robot., pp: 315-335.
2753
Res. J. Appl. Sci. Eng. Technol., 4(16): 2748-2754, 2012
Thrun, S., D.H.D. Ferguson, M. Montemerlo and
R. Triebel, 2003. A system for volurnetric robotic
mapping of abandoned mines. IEEE International
Conference Robot, Taiwan, pp: 4270-4275.
Thrun, S., W. Burgard and D. Fox, 2005. Probabilistic
Robotics. MIT Press, Cambridge, pp: 427-445.
Thrun, 2010. FastSLAM: A factored solution to the
simultaneous localization and mapping problem.
2010 IEEE International Conference on: Information
and Automation, pp: 1896-1901.
Williams, S.G. H.F. Dissanayake and Durrant-Whyte,
2008. Towards terrainaided navigation for
underwater robotics. Adv. Robot., 15(5): 533-550.
2754