Research Journal of Applied Sciences, Engineering and Technology 4(2): 206-213,... ISSN: 2040-7467 © Maxwell Scientific Organization, 2012
advertisement
: 206-213,... ISSN: 2040-7467 © Maxwell Scientific Organization, 2012")
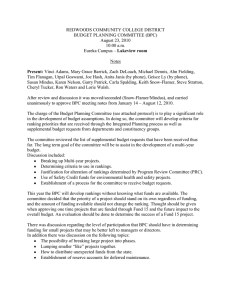
Research Journal of Applied Sciences, Engineering and Technology 4(2): 206-213, 2012 ISSN: 2040-7467 © Maxwell Scientific Organization, 2012 Submitted: October 02, 2011 Accepted: October 24 , 2011 Published: February 01, 2012 Robust Design a PSO Based IPFC Output Feedback Damping Controller 1 Amin Safari and 2Navid Rezaei Young Researchers Club, Ahar Branch, Islamic Azad University, Ahar, Iran 2 Electrical Engineering Department, Iran University of Science and Technology, Tehran, Iran 1 Abstract: In this study, on basis of a novel control scheme for Interline Power Flow Controller (IPFC), the dynamic performance of the IPFC is investigated. For this purpose, the Heffron-Phillips model of a Single machine power system is extracted and a novel feedback-based supplementary IPFC controller is applied to the power system. The Particle Swarm Optimization (PSO) algorithm which has a powerful potential to find the optimal solutions is employed to achieve the global optimum design of the feedback controller parameters. Thus, to better assessment, the potential of various IPFC control signals upon the power system's different operating conditions is investigated through the time domain simulation. The results in time-domain simulation analysis reveals that the designed PSO based IPFC controller tuned by the proposed objective function has an excellent capability in damping power system low frequency oscillations and enhance greatly the dynamic stability of the power systems. Moreover, the system performance analysis under different operating conditions show that the m1 (magnitude of injected voltage) based controller is superior to the other based controller. Key words: Dynamic stability, IPFC, output feedback, power system oscillation, PSO applied to the interconnected power systems, it can also provide significant damping effect on the tie line power oscillations through its supplementary control. IPFC consists of two or more series Voltage Source Converters (VSC), connected through a DC link, which can inject series voltages into the compensated transmission lines. In the view of controllability, the IPFC can control the magnitude and phase of the series injected voltages, independently. The basic theory and the operating characteristics of the IPFC is first introduced by (Gyugyi et al., 1999). They proposed IPFC as a new concept for the compensation and the effective power flow management of a multi-line transmission system. After that, the IPFC’s impacts in power flow management and steady-state analysis perused in some studies (Vasquez-Arnez et al., 2008; Zhang et al., 2006; Bhowmick et al., 2009). Recent publications on the modeling of the IPFC in Newton power flow calculation and the application of IPFC to Optimal Power Flow (OPF) control due to its constraints have greatly deepened people’s understanding of the performance of IPFC in the steady-state analysis. However, detailed and quantities research on the topic of dynamic performance of IPFC is still not sufficient. (Azeb and Mihalic, 2009) constructed the structure-preserving energy function of an electric power system using the power injection model of an IPFC to show the adequate effect of the IPFC in mastering the dynamic phenomena. (Parimi et al., 2008; Kazemi and Kalini, 2006) use the linearized Heffron-Phillips model of a single machine infinite bus power system and the phase compensation method, to design the IPFC’s damping INTRODUCTION Nowadays, power systems are interconnected large nonlinear systems that have electromechanical oscillatory modes with light damping. Low Frequency Oscillation (LFO) is a one of the phenomena that may threat the dynamic stability of power systems. LFOs usually occur after a disturbance in the power system and these oscillations emerging in power system variables such as bus voltage, line current, power flow and generator speed. Traditionally, extension of the stability ranges in the power systems is exerted by Power System Stabilizers (PSSs). PSSs provide the supplementary control signals for AVR and the turbine regulatory system. However, PSSs suffer a drawback of being liable to cause great variations in the voltage profile and they may even result in leading power factor operation and losing system stability under severe disturbances, especially those of three-phase faults which may occur at the generator terminals (Keri et al., 1999). Besides, in recent years, due to the fast progress in design, manufacture and application of power-electronics devices, consequently, imparting of power system from power-electronics’ productions such as FACTS devices have been an advanced process. Because of the extremely fast control action associated with FACTS-device operations, they have been very promising candidates for utilization in power system damping enhancement. The Interline Power Flow Controller (IPFC) is one of the FACTS devices which can be employed for regulating power flow between parallel lines or in the transmission hallways. When the IPFC is Corresponding Author: Amin Safari, Young Researchers Club, Ahar Branch, Islamic Azad University, Ahar, Iran 206 Res. J. Appl. Sci. Eng. Technol., 4(3): 206-213, 2012 controller parameters. However, the optimal signal selection has not been investigated in those papers. Recently, PSO technique such as other evolutionary computational techniques based on swarm intelligence like Ant Colony Optimization (ACO) is exerted in power system analysis to improve the stability problem of the power system due to the complex and multi-agent constraints. The PSO is a novel population based metaheuristic, which utilizes the swarm intelligence between the particles in a swarm and has emerged as a useful tool for the optimization. In this paper, the optimal decentralized design of a supplementary output feedback controller of the IPFC is investigated. The accomplishment of the designed controller is practical by using the local and available states (DT and DVt) as the input of the controller. The problem of the robust controller design is formulated as an optimization problem and PSO technique is used to solve it. A performance index is defined based on the system dynamics after an impulse disturbance alternately occurs in the system and it is organized for a wide range of operating conditions and used to form the objective function of the designed problem. The effectiveness of the designed controller is demonstrated through the nonlinear time simulation studies to damp low frequency oscillations under different operating conditions. In this study, we also compare the IPFC’s parameter controls in order to determine the most effective control signal for damping power system oscillations better. This comparison executed under various operating conditions. Results show the good robustness of this design using the PSO algorithm and the superiority of the m1 based controller to the other three based controllers due to different operating conditions. Start Select parameters of PSO: N, c1 , c 2 , c and ω Generate the randomly position and velocities of particles Initialization, pbest with a copy often position for particle, determine gbest Update velocities and position according to Eq. (1, 2) Evaluate the fitness of each particle Update pbest and gbest Satisfying stopping criterion No Optimal vale of the damping controller parameters End Fig. 1: Flowchart of the proposed PSO technique version of the PSO keeps track of the overall best value (gbest), and its location, obtained thus far by any particle in the population. The PSO consists of, at each step, changing the velocity of each particle toward its pbest and gbest according to Eq. (1). The velocity of particle i is represented as Vi = (vi1, vi2. . . viD). The position of the ith particle is then updated according to Eq. (2) (Del Valle et al., 2008). Review of PSO technique: (Kennedy and Eberhart, 1995) presented a multi-agent general meta-heuristic method based on the swarm intelligence which is called Particle Swarm Optimization algorithm. In other words, PSO is a nature-inspired stochastic search algorithm that can provide a near-optimal solution in a reasonable time. It has also been found to be robust in solving problem featuring non-linearity, non-differentiability and highdimensionality. This search algorithm is based on the knowledge gained by both the swarm and each individual, called a particle. Each particle in the swarm represents a candidate solution of the optimum design problem (Del Valle et al., 2008). The PSO is initialized with a group of random particles and searches for the optimal point by updating generations. In each iteration, particles are updated by the best values of itself and the swarm’s. The ith particle is represented by Xi = (xi1, xi2, . . . , xiD). Each particle keeps track of its coordinates in hyperspace, which are associated with the fittest solution it has achieved so far. The value of the fitness for particle i (pbest) is also stored as Pi = (pi1, pi2, . . . ,piD). The global vid w vid c1 rand () ( Pid xid ) c2 rand () ( Pgd xid ) (1) xid xid cv id (2) where, Pid and Pgd are pbest and gbest. In the PSO algorithm, the trade-off between the local and global exploration abilities is mainly controlled by the inertia weights (T). The inertia weight which is formulated as in Eq. (3) varies linearly from 0.9 to 0.4 during the run (Del Valle et al., 2008). max min .iter itermax max 207 (3) Res. J. Appl. Sci. Eng. Technol., 4(3): 206-213, 2012 Vi Vt i2 Gen X t1 i1 Tr : Line Vb Xt 2 VSC 2 Vdc VSC 1 m2 2 m1 1 Fig. 2: SMIB power system equipped with the IPFC Table 1: System parameters Controller Parameters Control signal *1 m1 *2 m2 168.2944 195.0985 163.0298 199.5966 and transients of the transformers, the IPFC’s dynamic model in order to study the small-signal stability of a power system can be modeled as the following (7): K1K2 9.8057 1.2259 6.0265 2.1342 Vinjkd 0 Vinjkq xtk where, Tmax is the initial value of the inertia weight, Tmin is the final value of the inertia weight, itermax is the maximum iteration number and iter is the current iteration number. Figure 1 shows the flowchart of the PSO algorithm. x tk 0 mkVdc cos k ikd 2 i m V sin , k 1, 2 k kd k dc 2 METHODOLOGY Dynamic model of power system: The IPFC consists of two series coupled transformers to each transmission lines, two three-phase GTO based Voltage Source Converters (VSCs), and a DC link capacitor. The control parameters of each IPFC’s branch are the magnitude and the angle of series injected voltage, i.e., m1, m2, *1, and *2, respectively (Parimi et al., 2008). Consequently, by changing these parameters other system parameters such as bus voltages, active and reactive power flows, could be controlled. According to the independence of the magnitude of the series-injected voltages generating by VSCs of the magnitude of the bus voltage, in an IPFC with 2 branches, 3 parameters can be independently controlled as one parameter control the active power balance in the IPFC. Figure 2 shows a SMIB power system equipped with an IPFC. The synchronous generator is delivering power to the infinite-bus through a double circuit transmission line and an IPFC. The nominal parameters and operating condition of the system are listed in Table 1. 2 Vdc 4C k 1 3m (ikd cos k ikd sin k ) (4) (5) dc From the above equations, we can obtain: The xt1, xt2, xd, x'd and xq which are the transformer 1 and 2 reactance's, d-axis reactance, d-axis transient reactance, and q-axis reactance, respectively. Where, Vinj1, i1, Vinj2, and i2 are the voltage of the transformer of line 1,current of line 1, voltage of the transformer of line 2 and the current of line 2, respectively; Cdc and Vdc are the DC link capacitance and voltage; It and Vb, are the armature current and infinite bus voltage. The nonlinear model of the SMIB system as shown in Fig. 2 is described by (Kazemi and Kasimi 2006): 0 ( 1) Power system nonlinear model with IPFC: By applying the Park’s transformation and neglecting the resistance 208 Pm Pe D M (6) (7) Res. J. Appl. Sci. Eng. Technol., 4(3): 206-213, 2012 E q E fd Eq E fd 0 K 1 M K4 A Tdo K A K5 T KA 7 (8) Tdo K A (Vref Vt ) E fd TA (9) 0 K pm1 M K qm1 B Tdo K A K vm1 TA K cm1 The linearized model of power system as shown in Fig. 2 is given as follows: 0 (10) ( Pe D ) M (11) Tdo (12) E fd K A ( Vref Vt ) E fd TA 0 0 0 0 0 K p 1 M K q 1 Tdo K A K v 1 TA K c 1 IPFC output feedback controller design using PSO: A power system can be described by using a state-space model as follows: (13) x Ax Bu, y Cx Pe K1 K2 Eq K pd Vdc K pm1 m1 K p 1 1 K pm2 m2 K p 2 2 Eq K4 K3 Eq Kqd Vdc Kqm1 m1 Kq 1 1 Kqm2 m2 Kq 2 2 Vt K5 K6 Eq K pv Vdc Kvm1 m1 Kv 1 1 Kvm2 m2 Kv 2 2 Vdc K7 K8 Eq K9 Vdc Kcm1 m1 Kc 1 1 Kcm2 m2 Kc 2 2 (14) (19) where, x, y and u denote the system linearized state, output and input variable vectors, respectively. A, B and C are constant matrixes with appropriate dimensions which are dependent on the operating point of the system. The eigenvalues of the state matrix A define the stability of the system when it is affected by a small interruption (Shayeghi et al., 2009). As long as all eigenvalues have negative real parts, the power system is stable when it is subjected to a small disturbance. If one of these eigenvalues has a positive real part the system is unstable. In this case, using either the output or the state feedback controller can move the unstable mode to the left hand side of the complex plane in the area of the negative real parts. An output feedback controller has the following structures: (15) (16) (17) u Ky The state-space model of the power system is given by: x Ax Bu 0 K pv 0 M K 1 qv Tdo Tdo K A K vd 1 TA TA K 9 0 0 0 K K pm 2 q 2 M M K qm2 K q 2 Tdo Tdo K A K v 2 K A K vm2 TA TA K cm2 K c 2 0 In order to improve damping low frequency oscillations, the task of damping controller is producing an in-phase electrical torque, with the speed deviation )T, considering as the input for the damping controller. E fd Eq E q 0 K 2 M K3 Tdo K A K6 TA K8 w0 (20) Substituting (19) into (20) the resulting state equation is: (18) x Ac x where, the state vector x, control vector u, A and B are: (21) where, AC = A-BKC. By properly choosing the feedback gain K, the eigenvalues of closed-loop matrix Ac are moved to the left-hand side of the complex plane and the desired performance of controller can be achieved. Once the output feedback signals are selected, only the selected x [ Eq E fd vdc ]T : u [ m1 1 m2 2 ]T 209 Res. J. Appl. Sci. Eng. Technol., 4(3): 206-213, 2012 Table 2: The optimal parameter settings of the proposed controllers based on the different objective function based on the different control signals (*1, m1, *2, m2) Xd = 1pu Generator M = 8 MJ/MVA TTido= 5.044s XXid = 0.3 pu D=0 Xq = 0.6pu Ta = 0.01s Excitation System Ka = 100 Xt = 0.8 pu Transformers Xt1 = 0.2 pu Xt2 = 0.2 pu Xtie-line = 0.4 pu Transmission Lines XL1 = 0.4pu XL2 = 0.4 pu Operating Condition P = 0.8 pu Vb = 1pu Vt = 1 pu Cdc = 1pu DC Link Parameter Vdc = 2 pu *1 = -70.56o IPFC Parameter m1 = 0.15 m2 = 0.1 *2 = -82.44o Ks = 1 Ts = 0.05 Speed deviation 0.025 -0.025 i 1 0 t i dt K2min K2 K2max 10 Angle deviation 2 0 0 5 Time (sec) 10 (b) 0.025 (22) 0.00 -0.02 In Eq. (33) NP is the total number of operating points to carry out the optimization, tsim is the time range of simulation and )T is the deviation of the rotor speed of the generator in SMIB. The optimization purpose is minimizing the objective function bounded to following constraints: Minimize J subject to: K1min K1 K1max 5 Time (sec) 4 Speed deviation J 0 (a) signals are used in forming Eq. (30). Thus, the remaining problem in the design of output feedback controller is the selection of K to achieve the required objectives. The control objective is to increase the damping of the critical modes to the desired level. It should be noted that the four control parameters of the IPFC can be modulated in order to produce the damping torque. In this paper, the four control parameters of the IPFC (m1, m2, *1 and *2) modulated in order to produce the damping torque. The parameters of the damping controller are obtained using PSO algorithm. In this study, an Integral of Time multiplied Absolute value of the Error (ITAE) is taken as the objective function. Since the operating conditions in power systems are often varied, a performance index for a wide range of operating points is defined as follows: Np t sim 0.00 0 5 Time (sec) 10 (c) Fig. 3: (23) C C The PSO algorithm searches for an optimal or near optimal set of controller parameters, with typical ranges are [0.01-200] for K1 and [0.01-10] for K2 of the optimized parameters. Using the time domain simulation model of the power sy stem on the simulation period, the objective function is calculated and by considering the multiple operating conditions, the optimal parameters of the controller is carried out. The operating conditions are considered as: C C Dynamic responses for )T with controller at (a) Base case (b) Case 1 and (c) Case 2 loading; Solid (m1),Dot-dashed (m2), Dashed (*1) and Dotted (*2) Base case: P = 0.7 pu, Q = 0.15 pu and XL1 = 0.4 pu. (Nominal loading) Case 1: P = 1.25 pu, Q = 0.25 and XL1 = 0.4 pu. (Heavy loading) Case 2: P = 0.2 pu, Q = 0.02 and XL1 = 0.4 pu. (Light loading) Case 3: P = 0.7 pu, Q = 0.15 pu and XL1 = 0.5 pu. (25% increase in the line reactance) In this study, the value of NP is 4 corresponding to the above four cases and the simulation run-time equals to 210 Res. J. Appl. Sci. Eng. Technol., 4(3): 206-213, 2012 4 Speed deviation Angle deviation 0.03 2 0 0 5 Time (sec) 10 0 -0.005 0 (a) 5 Time (sec) 10 (a) 0.05 0.00 -0.04 0 5 Time (sec) Speed deviation Speed deviation 0.05 10 0 -0.03 (b) 0 5 Time (sec) 18 10 0.035 9 Speed deviation Angle deviation (b) 0 0 5 Time (sec) 10 0 -0.01 0 (c) Fig. 4: Dynamic responses for )* with controller at (a)Base case (b)Case 1 and (c)Case 2 loading; Solid(m1),Dotdashed(m2), Dashed (*1) and Dotted (*2) 5 Time (sec) 10 (c) Fig. 5: Dynamic responses for )Pe with controller at (a) Base case (b)Case 1 and (c) Case 2 loading; Solid (m1),Dotdashed (m2), Dashed (*1) and Dotted (*2) tsim = 10. In order to acquire better performance, number of particle, particle size, number of iteration, c1, c2 and c is chosen as 40, 5, 100, 2, 2 and 1, respectively. It should be noted that PSO algorithm is run several times and then optimal set of IPFC controller parameters is selected. Also, the inertia weight, T, is linearly decreasing from 0.9 to 0.4. The final values of the optimized parameters with the objective functions, J, are given in the Table 2. RESULTS Simulation studies are carried out for a fault disturbance occurred in an occasional scenario. As such, we can assess the robustness of the designed damping controller by PSO algorithm. 211 Res. J. Appl. Sci. Eng. Technol., 4(3): 206-213, 2012 4 Control signal deviation Speed deviation 0.05 0 -0.04 0 -4 0 10 5 Time (sec) 0 5 Time (sec) (a) 10 (b) Power deviation 10 0 -1 0 5 Time (sec) 10 (c) Fig. 6: Dynamic responses for )u with controller at (a) Base case (b) Case 1 and (c) Case 2 loading; Solid (m1), Dot-dashed (m2), Dashed (*1) and Dotted (*2) 1 Power deviation Control signal deviation 4 0 0 -0.8 -3 0 5 Time (sec) 0 10 (a) 1 Power deviation Control signal deviation 10 (b) 1 0 -8 5 Time (sec) 0 -1 0 5 Time (sec) 10 (c) 0 5 Time (sec) 10 (d) Fig. 7: Dynamic response of VSC1: (a) m1, (b) *1 and VSC2, (c) m2 d *2 in various load conditions: Solid (heavy), dashed (nominal) and dotted (light) 212 Res. J. Appl. Sci. Eng. Technol., 4(3): 206-213, 2012 Description the considered scenario: A 6-cycle threephase fault occurred at t = 1 sec at the middle of the of one transmission line is considered. The fault is cleared without line tripping and the original system is restored upon the clearance of the fault. This severe disturbance is considered for different loading conditions and the performance of the proposed controller under these conditions is verified. The system response to this disturbance is shown in Fig. 3, 4, 5, 6 and 7. From the above conducted test and the figures, it can be concluded that the m1 controller is superior to the other three controllers. As such, it can be concluded that the m1 controller is the most robust controller. Moreover, in a constant line reactance, with decreasing in load, therewith, decreasing in the transmission angle (*), the line current is dropping. As a result, the active power which the series VSCs interchange with the uncompensated lines will be decreased. The active power injection decreases with decreasing the transmission angle. Therefore, LFOs which are occurred in light load conditions are damped posterior due to nominal or heavy loading conditions. Moreover, decreasing the load and increasing in the line reactance may have a castrating effect in weakening these four controller performances. REFERENCES Azeb, V. and R. Mihalic, 2009. Energy function for an interline power-flow controller. Electric Power Syst. Res., 79: 945-952. Bhowmick, S., B. Das and N. Kumar, 2009. An advanced IPFC model to reuse Newton power flow codes, IEEE T. Power Syst., 24(2): 525-532. Del Valle, Y., G.K. Venayagamoorthy, S. Mohagheghi, J. Carlos and R.G. Harlry, 2008. Particle swarm optimization: Basic concepts, variants and application in power systems. IEEE T. Evol. Comp., 12: 171-195. Gyugyi, L., K.K. Sen and C.D. Schauder, 1999. The interline power flow controller concept: A new approach to power flow management in transmission systems. IEEE T. Power Deliver., 14: 1115-1123. Kazemi, A. and E. karimi, 2006. The Effect of Interline Power Flow Controller (IPFC) on Damping InterArea Oscillation in the Interconnected Power Systems. IEEE ISIE, Canada, pp: 1911-1915. Kennedy, J. and R. Eberhart, 1995. A New Optimizer Using Particle Swarm Theory, Micro Machine and Human Science, the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, pp: 39-43. Keri, A.J., X. Lombard and A.A. Edris, 1999. Unified power flow controller: Modeling and analysis. IEEE T. Power Deliver., 14(2): 648-654. Parimi, A.M., I. Elamvazuthi and N. Saad, 2008. Interline power flow controller (IPFC) based damping controllers for damping low frequency oscillation in power system. ICSET, 334-339. Shayeghi, H., H.A. Shayanfar, S. Jalilzadeh and A. Safari, 2009. Design of output feedback UPFC controller for damping of electromechanical oscillations using PSO, Energy Conversion, 50: 2554-2561. Vasquez-Arnez, R.L. and L. Cero-Zanetta, 2008. A novel approach for modeling the steady-state VSC-based multiline FACTS controllers and their operational constraints. IEEE T. Power Deliver., 23: 457-464. Zhang, Y., Y. Zhang and C. Chen, 2006. A novel power injection model of IPFC for power flow analysis inclusive of practical constraints. IEEE T. Power Syst., 21: 1550-1556. CONCLUSION In this study, IPFC’s effect on the dynamic stability of power system has been investigated. The design problem of the IPFC’s output feedback controller is converted into an optimization problem which is solved by a PSO technique with an ITAE performance index applied as an objective function. The effectiveness of the proposed IPFC signal controllers for improving dynamic stability performance of a power system are demonstrated by a weakly connected example power system subjected to a severe disturbance. Then, we compare the IPFC’s different control signals in order to demonstrate the most effective control signal to provide good damping low frequency oscillations in single-machine power system. The non-linear time domain analysis results reveal that the proposed controller based on m1 control signal has superiority than other three signal based controllers due to the different operating conditions. 213