Study of Optimal Mutation factor for Genetic Algorithm (GA).
advertisement
.")
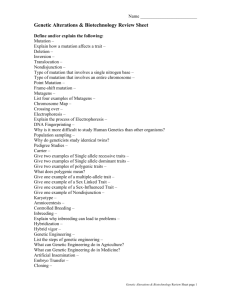
International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 6, June 2013 ISSN 2319 - 4847 Study of Optimal Mutation factor for Genetic Algorithm (GA). Waghoo Parvez1, Sonal Dhar2 1 Department of Mechanical Engg, Mumbai University, MHSSCOE, Mumbai – 400008 2 Department of Production Engg, Mumbai University, DJSCOE, Mumbai – 410206 ABSTRACT Genetic Algorithm (GA) was invented by John Holland in around 1975. Genetic Algorithm has a number of operator’s viz. Selection, Crossover, Mutation. Mutation is one of the basic operators of Genetic Algorithm. Several techniques of mutation are proposed with their merits and de-merits in various books and technical papers. This paper presents study on random mutation technique in order to find out the optimum probability of mutation. GA program is executed on a static environment for path planning of a robot. Keywords: Mutation, Genetic Algorithm, path planning. 1. INTRODUCTION Path planning is a term used in robotics for the process of detailing a task into discrete motions. It is a process to compute a collision-free path between the initial and final configuration for a rigid or articulated object (the "robot") among obstacles. It is aimed at enabling robots with capabilities of automatically deciding and executing a sequence motion in order to achieve a task without collision with other objects in a given environment. [1] The Genetic algorithm is an adaptive heuristic search method based on population genetics. Genetic algorithm were introduced by John Holland in the early 1970s [2].Genetic algorithm is a probabilistic search algorithm based on the mechanics of natural selection and natural genetics. Genetic algorithm is started with a set of solutions called population. A solution is represented by a chromosome. The population size is preserved throughout each generation. At each generation, fitness of each chromosome is evaluated, and then chromosomes for the next generation are probabilistically selected according to their fitness values [3]. A genetic algorithm is a search technique used in computing to find exact or approximate solutions to optimization and search problems. Genetic algorithms are categorized as global search heuristics. Genetic algorithms are a particular class of evolutionary algorithms (EA) that use techniques inspired by evolutionary biology such as inheritance, mutation, selection, and crossover [4]. Genetic algorithms have been used to find optimal solutions to complex problems in various domains such as biology, engineering, computer science, and social science. Genetic algorithms fall under the heading of evolutionary algorithm. Evolutionary algorithms are used to solve problems that do not already have a well defined efficient solution [5]. Genetic algorithm have been used to solve optimization problems (scheduling, shortest path, etc), and in modeling systems where randomness is involved (e.g., the stock market). The organization of the thesis is as follows Section 2 consists of the work done by other authors on topic related to the work. Section 3 consists of environment design and assumptions made in study. Section 4 is the actual study which is done by running the program collecting the date and plotting of results. Section 5 summarizes the result and discussion. Section 6 gives the conclusion. 2. RELATED WORK Recently number of researchers have studied the operators of GA and developed new techniques for the operators and compared the techniques with one another. Greenwell [6] et.al studied the performance of various mutation techniques of GA in order to maximize the fitness function. Fuat Erbatur et al [7] studied and analyzed various crossover techniques based on optimal structural design and proposed two new developed crossover technique. Srinivas et al [8] described an efficient approach for multimodal optimization using GA and recommended adaptive probabilities of Volume 2, Issue 6, June 2013 Page 429 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 6, June 2013 ISSN 2319 - 4847 crossover and mutation. Thomas back [9] has discussed three fitness function counting one problem, standard binary encoded integer and grey coded integer problem. 3. ENVIRONMENT & PROBLEM STATEMENT 3.1 Representation of Environment Many path planning methods use a grid-based model to represent the environment space as shown in Fig. 1. It has been determined that calculation of distance and representation of obstacle is easier with grid-based representation. The gridbased environment space is represented in two ways, by the way of an orderly numbered grid or by the way of (x, y) coordinates plane. It has been found that the orderly numbered grid representation is widely used; therefore this representation method is used in the present study. [10] 3.2 Fitness Function The objective function plays a key role in the reproduction process in terms of obtaining feasible and high fitness solution. Generally in the path planning problems the objective function is considered as the shortest path (1). Optimal path may be the shortest and may lead to least time. Objective value is the sum of distances between each grid. n-1 F = ∑ d (gi,gi+1) (1) j=1 d (gi,gi+1) = √ [(x1-x2)2 + (y1 – y2)2 ] (2) 3.3 Problem Assumption [11] 1. The environment is modeled in 2-D space. 2. The environment and obstacles are of polygon shape. 3. The boundary of every obstacle is expanded by an amount that is equal to half of the greater size in the length & width of the robot. 4. The environment is of 10 X 10 units. 5. It should always travel the centre of the grid. 6. It always starts from 0 and terminates at 99. 3.4 Operator Values The program was executed on Sony Vaio Laptop with 2 GHz processor and 2G RAM. Operators of GA: Population size = 120 Crossover Operator = 0.3 Mutation Operator = Varied from 0 ~ 0.8 No. of generations/iterations = 50 4. STUDY OF EFFECT OF MUTATION FACTOR 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 Figure 1 Environment No. 1 Volume 2, Issue 6, June 2013 Page 430 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 6, June 2013 ISSN 2319 - 4847 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 Figure 2 Environment No. 2 33 - Defines obstacle (in yellow colour) Table 1: Fitness Values for the two environments Environment No Fig No Fitness Value 1 1 13.8995 2 2 14.4853 Figure 3 Fitness Value vs Mutation Rate for Environment 1. Figure 4 Fitness Value vs Mutation Rate for Environment 2. Volume 2, Issue 6, June 2013 Page 431 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 6, June 2013 ISSN 2319 - 4847 5. RESULTS AND DISCUSSIONS The program was run 10 times and the average result of 10 readings was taken to plot the graph. The results of variation in the mutation factor of Genetic Algorithm can be seen in fig 3 & 4. The results indicate that as the mutation factor lies in the range of 0 – 0.3 there is not much change in the fitness function but as the value increases beyond 0.3 the fitness function changes. 6. CONCLUSION This experiment was carried out on a static environment for path planning. Similarly experiments can be performed on various applications of GA and the results can be compared. Further new techniques can be generated to give more optimum results than the present ones. References [1.] http://en.wikipedia.org/wiki/Motion_ [2.] Manoj Kumar, Mohammad Husian, Naveen Upreti, & Deepti Gupta (2010) “Genetic Algorithm: Review & Application” International Journal of Information Technology and Knowledge Management July-December 2010, Volume 2, No. 2, pp. 451-454. [3.] Buniyamin N et al (2011) “Robot global path planning overview and a variation of ant colony system algorithm” International Journal of Mathematics and computers in simulation Issue 1Volume 5 2011 9-16. [4.] David E. Goldberg, Genetic Algorithms in search, optimization & Machine Learning“(Pearson Education Twelfth Impression 2013). [5.] Melanie Mitchell, an Introduction to Genetic Algorithms (Prentice Hall of India Edition 2005). [6.] Greenwell, R. N., Angus, J. E., & Finck, M. (1995). Optimal mutation probability for genetic algorithms. Mathematical and computer modelling, 21(8), 1-11. [7.] Hasançebi, O., & Erbatur, F. (2000). Evaluation of crossover techniques in genetic algorithm based optimum structural design. Computers & Structures,78(1), 435-448 [8.] Srinivas, M., & Patnaik, L. M. (1994). Adaptive probabilities of crossover and mutation in genetic algorithms. Systems, Man and Cybernetics, IEEE Transactions on, 24(4), 656-667. [9.] BVack, T. (1993). Optimal M utation Rates in Genetic Search. [10.] Tuncer, A., & Yildirim, M. (2012). Dynamic path planning of mobile robots with improved genetic algorithm. Computers & Electrical Engineering. [11.] Waghoo Parvez & Sonal Dhar (2013)‘Path Planning of Robot in static environment using Genetic Algorithm (GA) Technique’ Accepted for publication in International Journal of Advances in Engineering & Technology. AUTHOR Waghoo Parvez has completed his graduation in 2009 from University of Mumbai India with a Bachelor Degree in Production Engineering.. He is currently working as a lecturer in MHSSCOE and pursuing his Masters in Mechanical Engineering with specialisation in manufacturing systems engineering from University of Mumbai. His research interest is in path planning, CAD, Algorithms, Manufacturing. Sonal Dhar graduated from Sardar Patel University India with a Bachelor Degree in Mechanical Engineering in 1994. She then pursued her Masters in Mechanical Engineering with specialization in CAD/CAM & Robotics from Mumbai University in 2005.She is working as an Assistant Professor in DJSCOE Mumbai. Her research interest is CAD/CAM, Automation, path planning, FMS. Volume 2, Issue 6, June 2013 Page 432