International Journal of Application or Innovation in Engineering & Management... Web Site: www.ijaiem.org Email: , Volume 2, Issue 6, June 2013
advertisement

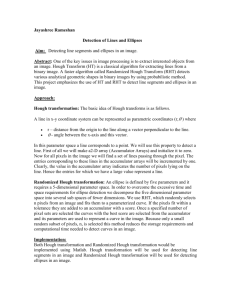
International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 6, June 2013 ISSN 2319 - 4847 Feature Extraction of Rich Texture Image Mayur B. Limbachiya1, Shrirang Pandit2 and Dattatray A. Patil3 and Kantilal P. Rane4 1,2,3&4 Godavari college of Engineering, Jalgaon. ABSTRACT Features extraction is the key process in the image processing field. Features can be classified into High level and Low level. This paper is focusing on both Low level features like Line detection and Edge detection and High level features like Boundary detection for rich textured image with experimental result. Linear Hough transform with Mare Hildreth edge detection is most commonly used technique for line detection. Required feature extraction from the rich textured image is complex and time consuming task for earlier proposed techniques. This paper is focused on feature extraction on rich textured images. A new approach proposed is the combination of Aniso-Tropic diffusion filtering with Marr Hildreth edge detection. Unwanted rich texture is removed by the anisotropic diffusion filtering and the raised features are detects by Marr Hildreth edge detection. Keywords: Feature extraction, Line detection, Edge detection, Boundary detection, Low level feature extraction, High level feature extraction, L*a*b color space. 1. INTRODUCTION Feature extraction means transforming the input data or information in reduced representation set of features. Features are classified based on global information like shape, intensity and local information like lines, edges and curves. Low level features like line detection is one of the basic task in computer vision approach. Earlier researcher [1]-[2]-[3] had worked on high level and low level feature extraction using linear Hough transform but texture richness of an image is the major issue for exact extraction of low level features. This paper describes low level and high level features like line detection and boundary detection techniques. Line detection from the image requires filtering, edge detection and line detection generally performed by Standard Hough transform. P. V. C. Hough [4] converts the point or pixel of an image into Hough space or parametric space to detect line passing through that point. Marr Hildreth [2] uses second derivative of Laplacian Gaussian with zero crossing to detect the sudden change in intensity in image. Intensity change in an image indicates the edge of any line. Above suggested both the technique is inefficient and time consuming for rich textured image. To address the above issue we introduces a new approach to extract the exact features of rich texture image. The proposed method reduces the unwanted rich texture by Aniso-Tropic diffusion filtering [5] followed by edge detection using Marr Hildreth edge detection [2] and after edge detection linear hough transform [1] is used to detect the line from raised texture. Proposed method uses L*a*b color space [6] based on color segmentation algorithm [7] to extract the High level feature like boundary detection. 2. LOW LEVEL FEATURE EXTRACTION Low level feature are those basic features that can be extracted without knowledge of the shape [8]. The visual content of an image like texture, color and intensity are Low level features of an image. Mainly line, curve and edges are considered as low level features in image processing field. Novel techniques [1]-[2]-[5] for extraction of low level features is proposed. 2.1 Line Detection Initial step in image processing stage includes feature like lines and curves detection from the images. Earlier proposed [1]-[2]-[9] techniques uses edge detection technique followed by the linear hough transform to detect the lines from the image. The line detection process includes filtering [5]-[9], Edge detection like Marr Hildreth edge detection [2] and linear Hough transform [1]. Many variety of Hough transform [4]-[10] are proposed by different researchers. Line detection using Hough transform performed by converting a point in image space to the Hough space. One pixel or point in image space can be line passing from that point in Hough space. C. V. Hari [11] brings the detail survey about different line detection algorithm. He explained the three different variant of Hough Transform like Standard Hough Volume 2, Issue 6, June 2013 Page 226 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 6, June 2013 ISSN 2319 - 4847 transform [4]-[1], Randomized Hough transform [12], and Mid-point Hough transforms [10]. The detail comparison of this three variant of Hough transform is given in table form by C. V. Hari [11]. D. Marr and E. Hildreth [2] also proposed a theory of edge detection. Intensity of the image is changed randomly throughout in image. Sudden change in intensity causes the zero crossing of second derivative. Line detection using Marr Hildreth uses the second derivative of Laplacian with a Gaussian to filter the occurrence of intensity change in image. Aniso-Tropic diffusion filtering process is used to reduce the noise present in the image, but it also blurs the image. Pietro Perona and Jitendra Malik [9] proposed a new definition of scale-space and algorithm which uses varying diffusion co-efficient spatially in which it encourages intra-region smoothing in preference to inter-region smoothing. In this paper, we proposed a method for line detection which is the combination of Aniso-Tropic Diffusion Filtering [9]-[5], Marr Hildreth Edge Detector [2] and Linear Hough transform [1]. processes which is very much useful to reduce the complexity of rich textured images and to raise the required line features. 2.2 Experimental Results of Line Detection Hough transform based line detection techniques using 1) Standard edge detection , 2) Marr Hildreth edge detection and 3) Aniso-Tropic diffusion filtering with Marr Hildreth edge detection is performed on rich textured image and results are shown in figure-1. The resultant image after applying standard Hough transform is shown in Figure 2. Hough transform extract the lines but due to the rich texture of an image, the unwanted texture will increase the amount of complexity. Marr Hildreth edge detection result is shown in Figure-3. Line detection with Marr Hildreth is less accurate than Standard Hough transform, but the amount of unwanted texture is less than Standard Hough Transformation. The proposed line detection with combination of Aniso-Tropic diffusion filtering with Marr Hildreth edge detection is shown in Figure-4. Figure 1: Rich Textured image Figure 3: Line detection after Marr Hildreth Figure 2: Line detection after Standard Hough transform Figure 4: Line detection after proposed combination of Aniso-Tropic diffusion filter & Marr Hildreth edge detection 3. HIGH LEVEL FEATURE EXTRACTION High level feature extraction requires local and global properties as well as spatial relation of the image. Boundary or shape is the high level features of an image. Boundary detection task is useful for segmentation and recognition in an image processing. Color segmentation is one of the approach to find out the boundary of an unknown shape. A new approach is proposed in this paper of boundary detection. 3.1 Boundary Detection Extraction of the boundary from an image can be perform by finding the set of pixels or points whose connected neighbor are not part of targeted region but lies on edges. The connectivity of the edge pixel with their neighbor will Volume 2, Issue 6, June 2013 Page 227 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 6, June 2013 ISSN 2319 - 4847 give us a boundary of the targeted region. So connectivity of that pixel with neighbor pixel is checked in clock wise or anti clock wise direction up to the starting pixel. The connectivity is checked using the 4-neighbour connectivity [3] or the 8-neighbour connectivity [3]. The boundary can be defined by both type of connectivity of the neighbor pixels. H. Freeman [13] proposed chain code method related to boundary detection. Defining the starting Pixels on the boundary of the shape is translated into connectivity between the neighbor pixels. Chain code keeps the track of direction from the starting pixels and creates sequence of unit vectors according to direction left, right, up and down. Chain code basically involves 4-connectivity or 8-connectivity [14]. This paper proposed a use of La*b* color space [6] based color image segmentation algorithm [7] for boundary detection. La*b* color spaces, which are color-opponent spaces with a dimension L for lightness and a and b for the color-opponent dimensions based on nonlinearly compressed CIE XYZ color space coordinates [6]. Color image segmentation algorithm works efficiently if the image is place on the dark background. Segmented color images are useful in order to extract exact boundary. La*b* color space [6] based color image segmentation algorithm [7] is used for exact extraction of dark colored portion (External Boundary Portion) from the captured rich textured image. Calculation of average L, a* and b* components of pixels within the external boundary area of image and major components within the internal boundary area of the image is useful for its classification into respective different color images. Approximately equal color component’s pixels with average L, a* and b* components of selected colors are separated into different color images. The 8Connected neighborhood boundary detection technique [3] finds the boundary along the edges using dark color segmented images. 3.2 Experimental Results of Boundary Detection Boundary detection using the 8-neighbour connectivity is shown in Figure 5. 8-neighbour connectivity is less efficient on rich texture image as shown in Figure 5 it detects the connected pixel into inner texture region which is not required in boundary detection. The result of the proposed method is shown in Figure 6 and Figure 7, rich texture color image is converted in to CIB Lab color space to find out L, a and b layers with the help of color segmentation technique. Boundary is detected from segmented image as shown in Figure 7. Figure 5: 8-connectivity result Figure 6: Boundary detection after Standard Hough transform Figure 7: La*b* color spaces based color image segmentation result (Proposed Method) Conclusion Low level feature extraction from rich texture image is discussed in section two with different approaches suggested by the researchers. Mainly Standard Hough transform is used to extract the line from the image but texture of image is a big issue. Unwanted texture is removed by the Marr Hildreth edge detection but result is not accurate. In our proposed method Aniso-Tropic diffusion filtering is used for removal of unwanted texture and Marr Hildreth edge detection is used to detect edge from the raised texture feature. At last Linear Hough transform is used to detect the lines from the image. The result shows the effectiveness of the proposed method for rich texture image. Section three describes the extraction of High level features like boundary or shape. The result of 8-neighbour connectivity technique is not Volume 2, Issue 6, June 2013 Page 228 International Journal of Application or Innovation in Engineering & Management (IJAIEM) Web Site: www.ijaiem.org Email: editor@ijaiem.org, editorijaiem@gmail.com Volume 2, Issue 6, June 2013 ISSN 2319 - 4847 sufficient for rich texture image. The proposed L*a*b color space based color segmentation method detect the accurate boundary within rich texture image. References [1] R. Duda and P. Hart, “Use of the Hough transformation to detect lines and curves in pictures,” Comm. ACM, vol. 15, pp. 11–15, 1972. [2] D. Marr. and E. Hildreth, "Theory of Edge Detection," Proc. Royal Society of London, B207, pp. 187–217, 1980. [3] http://www.imageprocessingplace.com/downloads_V3/root_downloads/tutorials/contour_tracing_Abeer_George_G huneim/connectivity.html. [4] P. V. C. Hough, A method and means for recognizing complex patterns, U.S. Patent 3,069,654. 1967. [5] Y. Yu and S. Acton, “Speckle reducing anisotropic diffusion”, IEEE Trans. Image Processing, vol.11, pp. 12601270, 2002. [6] “L*a*b* color spaces,” http://en.wikipedia.org/wiki/Lab_color_space#cite_note-11. [7] Nae-Joung Kwak, Dong-Jin Kwon, Young-Gil Kim, Jae-Hyeong Ahn, “Color image segmentation using edge and adaptive threshold value based on the image characteristics,” Book (ISBN: 0-7803-8639-6), pp: 555 – 558, Nov. 2004. [8] Feature extraction & image processing, by Mark Nixon, Alberto S Aguado, [9] Pietro Perona and Jitendra Malik, “Scale-Space and Edge Detection Using Anisotropic Diffusion,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 12, no. 7. July 1990. [10] C. V. Hari, J. Joseph, S. Gopi, V. P. Felix, and J. Amudha, “Mid-point Hough transform : A fast line detection method,” in Proceedings of IEEE INDICON 2009, pp. 237–240, 2009. [11] C. V. Hari, "Performance Evaluation of Different Line Detection Algorithms," International Journal of Modeling and Optimization, Vol. 2, No. 4, August 2012. [12] L. Xu and E. Oja, “Randomized hough transform,” Encyclopedia of Artificial Intelligence, pp. 1354–1362, 2008. [13] Freeman, H. “Techniques for the digital computer analysis of chain-encoded arbitrary plane curves”. In Proceedings of Electron. 1961. [14] Lili Ayu Wulandhari and Habibolah Haron, "The Evolution and Trend of Chain Code Scheme," ICGST-GVIP, ISSN 1687-398X, Volume (8), Issue (III), October 2008. AUTHOR Mayur B. Limbachiya received the B.E. in Electronics and Telecommunication and M.E. (Pursuing) degrees in VLSI & Embedded System Design from Godavari College of engineering in 2010 and 2013, respectively. He has working experience of 1.5 years in Industry and is currently working as lecturer in Godavari College of engineering, Jalgaon in Department of Electronics and Telecommunication. Shrirang S. Pandit received the B.E. in Electronics and Telecommunication and M.E. (Pursuing) degrees in VLSI & Embedded System Design from Godavari College of engineering in 2011 and 2013, respectively. He is currently working as lecturer in Godavari College of engineering, Jalgaon in Department of Electronics and Telecommunication Dattatray A. Patil received the B.E. in Electronics and Telecommunication and M.Tech.in VLSI. He has working experience of 15 years in Industry with various verticals in Embedded systems and is currently working as Assistant Professor at Godavari College of engineering, Jalgaon in Department of Electronics and Telecommunication. Kantilal P. Rane received the B.E. in Electronics and Telecommunication and M.E. (Electronics Engineering) degrees and Doctorate in Electronic Engineering. He has working experience about 2 years in Industry and 15.5 year in Teaching. He is currently working as Associate professor (PG)/ HOD in Department of Electronics and Telecommunication in Godavari College of engineering, Jalgaon. Volume 2, Issue 6, June 2013 Page 229