EFFECTS OF SHAPE AND SCALE IN MECHANICS OF ELASTIC
advertisement

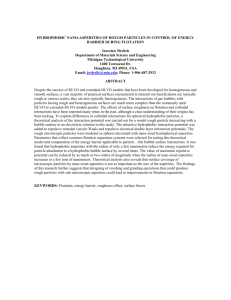
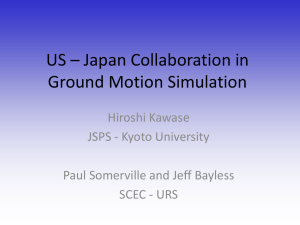
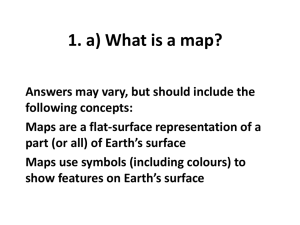
EFFECTS OF SHAPE AND SCALE IN MECHANICS OF ELASTIC INTERACTION OF REGULAR ROUGH SURFACES. A THEORETICAL STUDY Ivan Y. Tsukanov1 (Department of Tribology, A.A. Blagonravov Institute of Engineering Sciences of the Russian Academy of Science, Maliy Khariton’evskiy lane 4, Moscow, Russia) The formulation and solution of the plane problem of the elastic contact of surface roughness having two-scale regular asperities with a flat surface is considered. Small-scale asperities are simulated by special periodic curve with arbitrary waveform shape and large-scale asperities are simulated by a sine wave. On the basis of obtained solutions, the possible physical effects associated with the presence of arbitrary shaped small-scale asperities and roughness of larger scale in relation to calculation of elastic contact parameters are revealed. Keywords: asperity; elastic contact; roughness; waviness; scale; pressure distribution; contact area; periodic contact problem. Introduction. Study of contact interaction of real technological surfaces pays great attention of scientists working in different directions - physicists, engineers, chemists and others. This is primarily due to the fact that the interaction between the surfaces of solid deformable bodies tends to depend on surface irregularities due to their nature or machining at manufacturing. Mechanical contact of surfaces and the contact parameters determination such as pressure and the contact area are central to these studies, since these parameters determine the physical mechanisms of interaction of surfaces and their functional and operational characteristics. Many tribology problems are connected with the interaction of the contact of rough surfaces of bodies, at least one of which has a low modulus of elasticity, for example interactions in polymer – metal friction pairs. Friction and wear properties of such friction pairs are defined by contact interaction parameters of rough working surfaces. The Persson’s theory of randomly rough surfaces contact suggests zero probability density function (PDF) of zero contact pressure [1]. Yastrebov et al. [2] suggest an analogy between compression of a wavy surface and contact points of rough surface opening. When the valley of rough profile escapes contact it is similar to transition of wavy surface from full to partial contact, and the zero pressures can appear. So the PDF of zero contact pressure must be non-zero. Also Yastrebov et al. [2] established, that Westergaard’s solution for one dimensional sinusoidal profile [3] approximately fits contact pressure distribution of twodimensional problem for double sine wave, so some useful data for randomly rough surfaces interaction understanding can give the one dimensional model of regular rough (wavy) surfaces contact. In addition many metal technological surfaces have quasiregular asperities of different shape, depending on the tool and other processing parameters. When such surface contacts material with low modulus of elasticity, the area or contact can be significant in comparison with asperities sizes, so the shape of the asperity much influence on contact pressure distribution, which in that case can be non-Hertsian [4]. As a rule technological quasiregular asperities include smaller asperities of other (more large) scale, depending on random factors. In this article we consider the two-scale roughness with asperities of smallest scale, having different shape (waviness), and asperities of largest scale, having sinusoidal shape. Popov et al. [5] suggest two-scale random roughness as sufficient for describing elastomer friction process. The effects, appearing at contact process, related to shape of small-scale regular asperities in aggregate with asperities of large scale are the purpose of this paper, supposing the possibility of waviness shape technological control. 1 Corresponding author, Ph.D Ivan Y. Tsukanov, E-mail: ivan.yu.tsukanov@gmail.com 1 2. Methods, approaches and assumptions. Since the solution of the elastic problem depends only on the shape of the initial gap, the interaction between equivalent rough and flat surfaces is considered. In this paper the asperities of two scale levels - regular waviness of arbitrary shape (small scale asperities) and regular sineshaped roughness with an even wavelength ratio (large scale asperities), are considered: (1) y( x, m) w( x, m) r ( x), where the regular asperities of arbitrary shape are described by the proposed function, called parametric wave curve (Fig. 1); m – asperities shape parameter: w( x, m) H1 (m 1) cos πx / b1 m2 cos2 πx / b1 1 , (2) where H1 - height of small-scale asperities (waviness); b1 – width of small-scale asperities in the midline. When m = 0 parametric wave curve is a sine wave, and when m = 0.2 it with high precision approximates a parabola of second order. With the increase in the shape parameter m the parametric wave curve tends to shape of flat punch. Fig. 1. Graphs of parametric wave curve at H1 = 1; b1 = 10, and various shape parameters (m from bottom to up: 0.2; 2; 8; 35; 250) Regular roughness of the large scale is described by a sine wave with an even wavelength ratio: r ( x) H 2 cos( x / b2 ) H 2 cos( nx / b1) , (3) where H2 – height of asperity of large scale (sinusoidal roughness); b2 - width of large-scale asperities along the midline; n = b1/b2 - wavelength ratio. In this paper, to simplify the calculation the large scale asperities with an even wavelength ratio n is considered. Example of a profile with two-scale roughness is shown in Fig. 2. Fig. 2. Graphs of two-scale roughness at H1 = 1; b1 = 10; H2 = 0,05: n = 16; m = 0 (1) and n = 16, m = 10 (2) In this work the contacting bodies are linear elastic isotropic materials with two elastic constants - Young's modulus E, and Poisson's ratio μ and approximated by half-planes. The mathematical apparatus for solving the classic contact problems (for the half-plane) is applied. Influence of friction between the surfaces at normal pressure is not taken into account. We used a mathematical approach, suggested by Block and Keer [6] for the periodic problem in plane elasticity. 2 Approach, suggested by Block and Keer to solve periodic plane contact problems is to replace the variables for conversion of integral equations, used for periodic plane contact problems to the equations used for classic plane problems with single contact area. The method is based on the superposition of Flamant solutions and the following change of variables for the function of the gap (surface shape) [6]: u = tan(ξ/2); v = tan(x/2); α = tan(a/2), (4) where ξ – coordinate of the local coordinate system within the contact zone; a - the size of the contact area (half-length of contact zone). Taking into account, that the symmetric contact surfaces without friction are considered, the two main initial equations in the approach of the Block and Keer (for plane strain) are [6]: E* h 2 p(u ) du ; x v u a P p( x)dx (5) 2 p(u ) (6) du , 1 u2 where the eq. (5) - integral equation based on the change of variables (4) for the contact pressure, which has the Hilbert kernel; eq. (6) - equilibrium equation in the original and transformed variables; h(x) = δ – f(x) - the difference of displacements of the contacting surfaces; δ – contact approach; f(x) - the function that describes the shape of the surface; E* - reduced modulus of elasticity, defined as 1 1 12 1 22 . (7) E1 E2 E* a 3. The solution of the problem. The scheme of the problem is shown in Fig. 3. Fig. 3. The scheme of contact of a flat surface with a two-scale regular roughness for plane contact problem Assume, for simplicity, the period is L = 2b = 2π. Then the roughness profile (1) can be written as: y ( x, m) H1 (m 1) cos x m cos x 1 2 2 H 2 cos(nx) . (8) The difference between the normal displacements will be determined by the expression: H (m 1) cos x h( x, m) δ H1 1 H 2 H 2 cos(nx) . (9) m2 cos 2 x 1 Differentiating the eq. (9) and using the appropriate transformations, we obtain: 3 H1 (m 1)sin x h( x, m) H 2 n sin(nx) . 2 x 2 2 m cos x 1 (10) Next, consider the two components of a regular roughness individually on the basis of the principle of superposition of solutions. Doing in the first term of eq. (10) the change of variables in accordance with eq. (4), and converting the resulting expression taking into account single zone of contact in the new variables, we can write the integral equation (5) for small-scale asperities (waviness) as follows: H1E 2(m 1)v(v 2 1) * (m mv v 1) 2 2 2 2 p(u ) v u du (11) - Since the boundary of the contact is unknown, and the contact pressure distribution will be symmetric due to the symmetry of the problem, the non-singular solution at both ends is used [6]: H 2(m 1)v(v 2 1) E* 1 1 2 u2 1 dv . 2 2 2 2 2 v u 2 ( m mv v 1) v - pw (u, m) (12) The solution of the integral (12) for the waviness of arbitrary shape by expansion into partial fractions can be obtained in closed form, and it is written as follows: pw (u, m) H1E* (m 1)2 α 2 u 2 (u 2 1)(α 2 1) α 2 1(m mu 2 u 2 1)2 (m mα 2 α 2 1) (13) . Returning to the original variables and arbitrary period taking into account the periodicity of the problem and using trigonometric conversion, the formula for determining the contact pressure for the small-scale asperities with an arbitrary smooth waveform can be written: 2 H1E* (m 1)2 . (14) p ( x , m) cos x / 2b cos x / b cos a / b w m cos x / b1 1 2 2 2 m cos a / b1 1 2 2 2b1 1 1 1 Eq. (14) is a generalization of the Westergaard’s solutions [3] for the sine wave, and for m = 0 (when curve (2) is a sine wave), these solutions are the same. Numerical calculations and comparison of pressure distribution at m = 0.2 and for small loads at arbitrary m with Hertzian distribution show the adequacy of the formula (14). Eq. (14) shows that the basic solution for the sine wave [6] for the case of arbitrary waveforms is modified by a factor depending on the shape parameter m, which is the first factor in eq. (14). For a single contact region the solution is obtained in the reduction of degrees of the denominator of the first factor in eq. (14) in accordance with the fact that parametric wave curve also becomes aperiodic function at this operation. In case of full contact because of the linearity of the problem the expression for the component of contact pressure distribution for the large-scale roughness harmonic is determined by the shape of the asperities (sine curve) [4]: 2 E* (15) prf ( x) cos( nx / b1) 1 . b1 Consider the case of partial contact. The second term of eq. (10) can be represented as a finite product: n2 2 hr ( x) sin 2 ( x) . H 2 n sin( x) cos( x) 1 2 sin (2 k / n) dx k 1 (16) 4 Making the change of variables in the eq. (16), and in accordance with the rule of sums integration, we obtain the following inversion of the integral equation (5) for the large-scale component of roughness profile. 2 n2 2v 2 E* H 2 2v 1 v 2 2 1 1 1 v 2 2 (17) pr (u ) u n 1 2 dv . 2 2 2 2 v u 2 1 v 1 v sin (2 k / n ) k 1 - v If you plot the expression in square brackets in eq. (17), designating it as s(v), in the range of values of v, typical for a ≤ π/2 – v [0,1] with different n, determining step and the number of asperities (Fig. 4), it is evident that a significant contribution to the contact pressure the large-scale asperities make only in the initial stages of deformation. This is associated with the ratio of contact zones of asperities of various sizes. Given the fact that the pitch of waviness (small-scale asperities) much greater then roughness (large-scale asperities) pitch, the influence of large-scale asperities on the contact pressure will be low almost at all period of deformation of small-scale asperities except the initial curve piece of s(v) (see Fig. 4). And with the increase in the asperities scale (reduction of their sizes) the absolute value of the maximum of s(v) is slightly increased. Fig. 4. Effect of the wavelength coefficient n on the integrand in eq. (17): 1 – n = 8; 2 – n = 16; 3 – n = 32 If we expand the expression in square brackets in eq. (17) into partial fractions, it can be represented as: kv k v k1v k v 2 2 2 2 3 3 ... 2 n n , (18) 2 v 1 (v 1) (v 1) (v 1) where k1, k2, k3…kn - expansion coefficients, which can be found by the method of undetermined coefficients. In the interval 0 ≤ s(v) ≤ s(v)max (see. Fig. 4), i.e. when a ≤ b1/n (a ≤ b2), the value of the integral in eq. (17) from each of the fractions according to eq. (18) can be expressed by the approximate dependence describing it with enough accuracy, as shown by numerical calculations: kn E* H 2 E*H 2 1 1 2 2 kn v u 2 dv 2 u2 2 . (19) n n /2 2 n 2 2 v u 2 2 ( v 1) ( 1) ( u 1) v - Then eq. (17) can be represented as follows: kn E* H 2 k k2 , (20) pr (u ) 2 u 2 2 1/21 2 1 2 ... 2/2 2 2 2 n /2 2 n 2 ( 1) ( u 1) ( 1) ( u 1) ( 1) ( u 1) where the parameters u and α, should be replaced by x and a in accordance with eq. (4) similar to the eq. (14). If a ≤ b2 total solution for the contact pressure is determined by the sum of eqs. (14) and (20): p( x, m) pw ( x, m) pr ( x) . (21) 5 At the point x = 0, in which the pressure distribution pr(x) has a maximum, as shown by numerical calculations, eq. (20) allows to estimate the change in the contact pressure on the whole interval of function s(v) defining, i.e., on the interval a ≤ b1/2. Change of the function pr(0) has the same character as the change of the function s(v). 4. Results and discussion. Fig. 5 shows the pressure distributions, depending on the shape of the small-scale asperities (parameter m) and a size of the contact area, according to eq. (14). In the absence of the effect of the mutual influence of asperities, i.e., when a ≤ b1/2, or for single asperity (see. Fig. 5a) with the increase of the shape parameter m and the size of the contact area a pressure maximum decreased. Along with increasing of m, pressure distribution first tends to uniformity and then takes the form with peaks near to the edges of the contact zone. Upon reaching the value a = b1/2 the pressure at the center of the asperity is the same for all m, however, the values at other points - different. This form of curves is consistent with the theory of Schtaierman obtained for body shapes expressed by the power function [6]. If a ≥ b1/2 the effect of the mutual influence of the asperities begins. In the case of full compression of small-scale asperities (see. Fig. 5b) the individual contact zones merge into one, and with the parameter m increase the pressure distribution also tends to uniformity first, and then acquires the form with two peaks. An important practical result of the effect of shape of the small-scale asperities is the ability to optimize the pressure distribution for the specific values of a, according to criterion of uniformity. а b Fig. 5. Contact pressure distributions calculated by eq. (14), depending on the shape parameter m and the size of the contact area for a single (a) and periodic (b) contact: H1 = 1 mm; b1 = 10 mm Effect of waves shape significantly influences the dependence of the area of contact on the mean contact pressure. Fig. 6 shows the dependence of the ratio 2a/L1 (dimensionless length of the contact area) on the ratio pa/p* (dimensionless mean pressure) where pa = P/L1 - mean pressure (full load is determined by numerical integration of eq. (14) according to eq. (6)); p* = πH1E*/2b1 [4]. 6 Fig. 6. Dependence of the dimensionless contact zone length on the dimensionless mean pressure in various shapes of small-scale asperities Fig. 6 shows that the symmetry of the curve has only a sine wave (m = 0), which is also shown in [4]. With increases of m the mean pressure required for the deformation to the small size of the contact zone is reduced. Then, with increasing contact area it is observed an inverse dependence on the shape parameter m - the mean pressure required for the deformation is increasing. After reaching the state of a = b1/2, when there is an effect of mutual influence of the contact zones, the dependence changes radically. Moreover, with significant growth of the shape parameter m when the shape of an asperity approaches a flat punch, pressures, required for further deformation, decreases. Such diverse form of curves shows that when approaching a state of full contact the dependence "area-mean pressure" is strongly nonlinear, which obviously need to be considered when choosing the boundary conditions in the models of real contact with random roughness. We next consider the effect exerted by large-scale asperities. Taking into account the shape of the large-scale asperities - a sine wave, peak pressure will occur in the middle of asperity. Fig. 7 shows the dependence of the pressure in the center of small-scale asperity at compression of twoscale roughness in comparison with the pressure at compression of single-scale roughness with H1 = 1 mm; H2 = 0.15 mm; b1 = 10 mm (dashed lines show the dependences for single-scale roughness). a b Fig. 7. Dependence of pressure at x = 0 on contact zone length at different wavelength ratios n and shape parameters m: a – n = 8; b – n = 16; 1 – m = 0; 2 – m = 10 Fig. 7 shows that with increasing of wavelength ratio the zone of influence of large-scale asperities on pressure decreases. Considering the real surface after finishing treatment with significant value of n, it can be concluded that, large-scale asperities will significantly influence the contact pressure only on the initial (Hertzian) stage of deformation. It should also be noted that for small-scale asperities with large values of the shape parameter m the influence of large-scale 7 asperities at the initial stage of deformation becomes stronger (see. Fig. 7). On Fig. 8 there are the dependences of the contact area on the mean pressure calculated from eq. (21), on the interval of a ≤ b2. a b Fig. 8. Dependence of the dimensionless contact area on the dimensionless mean pressure during compression of single-scale and two-scale roughness at different wavelength ratios n: a – n = 8; b – n = 16; 1,3 - two-scale roughness; 2,4- single-scale roughness; 1,2 – m = 0; 3,4 – m = 10 Fig. 8 shows that the presence of large-scale asperities increases the mean pressures required for deformation and reduces the nonlinear zones of the curves. This is especially typifying for small-scale asperities with a large value of m. The existence of regular asperities of several scales slightly reduces the contact and therefore friction nonlinearity at low pressures. Conclusion. The obtained formulae allow to estimate some parameters of contact of regular rough surfaces when there are asperities of several scales and the small-scale asperities have arbitrary smooth shape. The above results show that the shape of small-scale asperities influence over the entire range of contact approaches (contact zones), and with technological control of small-scale asperities shape the pressure distribution can be optimized. Effect of large-scale asperities is shown significant only for small sizes of the contact zones and practically disappear at large deformations. References 1. Persson, B.N.J. (2006) “Contact mechanics for randomly rough surfaces”, Surface Science Reports, 61(4), 201- 227. 2. Yastrebov, V.A., Anciaux, G. and Molinari, J-F. (2014) “The contact of elastic regular wavy surfaces revisited” Tribology Letters, 56, 171-183. 3. Westergaard, H. M. (1939) “Bearing pressures and cracks”, Trans. ASME, J. Appl. Mech, 6, 49–53. 4. Johnson, K.L. (1987), Contact Mechanics. Cambridge University Press, Cambridge, UK. 5. Popov, V.L. et al. (2015) “On the role of scales in contact mechanics and friction between elastomers and randomly rough self-affine surfaces, Sci. Rep., 5, 11139. 6. Block, J.M. and Keer, L.M. (2008) “Periodic contact problems in plane elasticity”, Journal of Mechanics of materials and structures., 3, 1207-1237. 8