Dynamic causal modelling of brain-behaviour relationships J. Daunizeau
advertisement

Dynamic causal modelling
of brain-behaviour relationships
J. Daunizeau
Brain and Spine Institute, Paris, France
Wellcome Trust Centre for Neuroimaging, London, UK
Overview
DCM: introduction
Augmenting DCM with behavioural outputs
Proof of concept: inhibitory control
Overview
DCM: introduction
Augmenting DCM with behavioural outputs
Proof of concept: inhibitory control
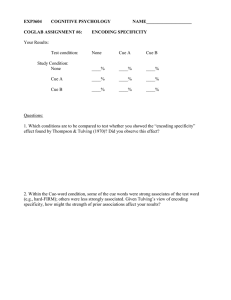
Brain connectivities
structural connectivity
functional connectivity
effective connectivity
O. Sporns 2007, Scholarpedia
•
structural connectivity
= presence of axonal connections
•
functional connectivity
= statistical dependencies between regional time series
•
effective connectivity
= causal (directed) influences between neuronal populations
! connections are recruited in a context-dependent fashion
Functional segregation / integration
localizing brain activity:
functional segregation
A
effective connectivity analysis:
functional integration
A
B
A
u1
u2
u1
B
B
u1
u2
u1 X u2
« Where, in the brain, did
my experimental manipulation
have an effect? »
« How did my experimental manipulation
propagate through the network? »
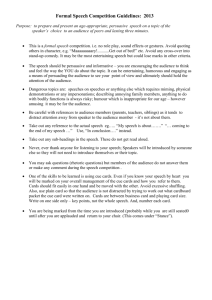
DCM for fMRI: example
auditory cue
visual outcome
or
P(outcome|cue)
or
Put
response
0
200
400
600
800
2000
time (ms)
PMd
PPA
FFA
PPA
cue-dependent
surprise
Put
FFA
PMd
cue-independent
surprise
Den Ouden et al., J. Neurosci., 2010
Dynamical systems theory
1
u
x
y
1
2
2
3
21
1
1
2
3
2
32
13
3
13u
time
3
u
t t
t 0
3u
t
u
t t
x t 0
x
t
Evolution and observation mappings
Hemodynamic
observation model:
temporal convolution
Electromagnetic
observation model:
spatial convolution
neural states dynamics
x f ( x, u , )
fMRI
EEG/MEG
• simple neuronal model
• realistic observation model
• realistic neuronal model
• simple observation model
inputs
System identification: agnostic neural dynamics
a24
b12
d24
gating effect
2
4
u2
modulatory effect
1
3
c1
u1
driving input
f
f
2 f
2 f x2
x f ( x, u ) f x0 ,0 x u
ux 2
...
x
u
xu
x 2
0
nonlinear state equation:
m
n
(i )
( j)
x A ui B x j D x Cu
i 1
j 1
Stephan et al., 2008
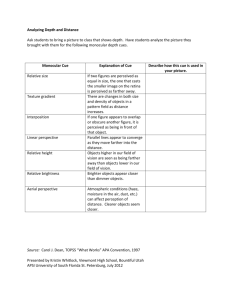
The neuro-vascular coupling
u
t
m
n
x A ui B (i ) x j D ( j ) x Cu
i 1
j 1
experimentally controlled
stimulus
neural states dynamics
vasodilatory signal
s x s ( f 1)
f
s
s
flow induction (rCBF)
f s
h { , , , , E0 , }
hemodynamic
states dynamics
f
n {A, B(i ) , C, D( j ) }
Balloon model
changes in volume
v f v
1/
v
( q, v )
v
changes in dHb
1/
q f E ( f,E0 ) E
q0 v q / v
q
S
q
V0 k1 1 q k2 1 k3 1 v
S0
v
k1 4.30 E0TE
k2 r0 E0TE
k3 1
BOLD signal change
observation
Friston et al., 2003
Parametric statistical approach
• DCM: model structure
y g x,
x f x, u,
24
2
likelihood
p y ,, m
4
3
1
u
• DCM: Bayesian inference
parameter estimates:
model evidence:
priors on parameters
ˆ p y , , m p m p m d d
p y m p y , , m p m p m d d
The variational Bayesian approach
ln p y m ln p , y m S q DKL q ; p y, m
q
free energy : functional of q
mean-field: approximate marginal posterior distributions:
q , q
1
2
p 1 ,2 y, m
2
p 1 or 2 y, m
1
q 1 or 2
Overview
DCM: introduction
Augmenting DCM with behavioural outputs
Proof of concept: inhibitory control
Identifying the brain-behaviour mapping
dk2
ak2
x2
x4
u2
x1
sensory
u
input 1
bk3
ok
behavioural
output
x3
u3
modelling the brain input-output transform (through the network)
decomposing the relative contribution of brain regions and their
interactions to the behavioural response
Identifying the brain-behaviour mapping
dk2
ak2
x2
x4
u2
x1
bk3
ok
behavioural
output
x3
sensory
u
input 1
u3
p o x s r 1 s r
o
1 o
t
r t h x , u e d r h x, u r
h
h
2h
2h x2
h x, u h 0,0 x u
ux 2
...
x
u
xu
x 2
bDCM: face validity
B
u2
0
1
u1
0
r
0
time (s)
F
u1
0
35
0
time (s)
35
time (s)
35
H
3
4
0
1
2
0
0
-2
r
0
beh
u2
0
BOLD
r
2
-2
y
inverted
1
G
Estimated value
E
BOLD signal
Inputs
u2
u1
4
1
Response
simulated
D
C
y
A
-2
Parameter
0
g(x)BOLD
4
0
g(x) beh
1
bDCM: face validity
u2
Functional connectivity
u2
u2
u1
u1
u1
r
Response encoding
u1
u1
r
A
B
C
D
explained variance
bDCM: behavioural susceptibility analysis
u1
u2
u1
u2
u1
u2
u1
u2
?
r
r
r
r
bDCM: predicting the effect of lesions
to u1
on
off
B
to u2
u1
permutation
0
u2
0 1 2 3 4 5 6
time (s)
u2
B
1
u1
C
0.8
0.6
0.4
0.2
0
A
u
contribution
B
C
A
connection
B
C
C
2
A
susceptibility
1
r
response rate
Volterra kernel
A
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
u2 = 0
u2 = 1
condition
normal
lesioned
u2 = 0
u2 = 1
condition
Overview
DCM: introduction
Augmenting DCM with behavioural outputs
Proof of concept: inhibitory control
Go/noGo: paradigm and fMRI results
A
B
Execute (NOGO)
t-value
8.5
Prepare
C
Go
cue
0.0
z=28
No-Go
z=62
Execute (GO)
prep
exec
stop
z=62
Go/noGo: model comparison set
H2
H3
H4
stop
direct
1
drive
cue
2
exec
3
potent
cue
cue
cue
4
serial
5
6
exec
exec
stop
H1
partial
prep
prep
prep
withold
prep
parallel
cue
cue
cue
cue
stop
full
1. left dPFC
2. right dPFC
3. left pre-motor 4. rigth pre-motor
5. left M1
6. right M1
modulation
Go/noGo: Bayesian model selection
5
H4 partial
H3 modulate
H1 drive
H2 direct
stop
- 4.85
cue
cue
exec
- 4.90
H0: - 6.73 x 103
- 4.95
+1
−1
1
prepare left
execute (Go)
stop (NoGo)
0
nnormalized eural activity
models
response predictor
log model evidence
x103
- 4.80
Go/noGo: behavioural fit
100
accuracy (%)
accuracy (%)
100
90
80
70
60
90
bDCM
70
fMRI decoding
60
50
50
0
2
train
test
train
test
evaluation set
4 6 8 10
time (s)
Left response
Right response
12
Volterra kernel
12
Volterra kernel
80
8
4
0
-4
-8
8
cue left
4
cue right
0
exec
-4
stop
-8
0
1
time (s)
2
0
1
time (s)
2
Go/noGo: behavioural susceptibility analysis
stop
cue
cue
exec
right response
left response
preparation
execution (Go)
stop (NoGo)
Go/noGo: lesion-induced behavioural deficits
stop
cue
cue
exec
1
response rate
1
0
1
L
R
1
0
0
L
R
L
R
L
R
1
L
R
R
response side
condition:
Go
No Go
0
L
R
1
0
1
node state:
normal
lesioned
0
L
R
0
Overview
DCM: introduction
Augmenting DCM with behavioural outputs
Proof of concept: inhibitory control
Many thanks to Lionel Rigoux