7
advertisement

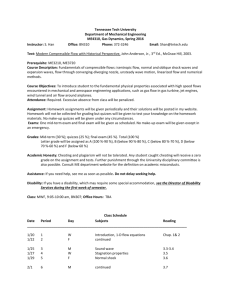
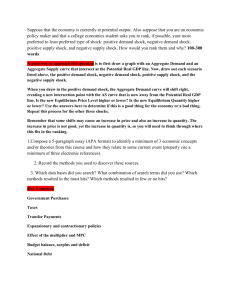
7. Systems of Conservation Law Equations Part III Riemann’s Problem. The initial value problem for a conservation law equation in R 2+ in which the initial state is piecewise constant, is called Riemann’s Problem. For a scalar equation it is the problem / t uÝx, tÞ + / x FÝuÝx, tÞÞ = 0, uÝx, 0Þ = u L if x < 0 u R if x > 0 . As usual, we suppose F”ÝuÞ > 0 and we note that the piecewise constant nature of the initial state implies that the characteristics will be straight lines, albeit not all having the same slope. There are three cases to consider, ¾ ¾ u L = u R : In this case the solution is everywhere equal to the same constant. This is a classical solution. u L > u R : Then FvÝu L Þ > FvÝu R Þ, which results in a region with overlapping characteristics. In this case the unique weak solution is a shock solution given by u L if x < sÝtÞ uÝx, tÞ = where s v ÝtÞ = ¾ u R if x > sÝtÞ FvÝu L Þ ? FvÝu R Þ , uL ? uR t > 0, sÝ0Þ = 0. . u L < u R : Then FvÝu L Þ < FvÝu R Þ, which results in a wedge shaped region containing no characteristics. In this case the wedge is filled with a rarefaction wave and the unique weak solution is given by . uÝx, tÞ = uL if x < FvÝu L Þ t G x t uR if FvÝu L Þ t < x < FvÝu R Þ t t > 0, if x > FvÝu R Þ t where GÝF v ÝsÞÞ = s, s 5 R. To see how this analysis might be extended to systems in R 2+ , consider first, the linear system u + A / x3 u=3 0 / t3 for x > 0, t > 0, where A denotes a constant n by n matrix with n real, distinct eigenvalues 1 8 1 < ... < 8 k < 0 < 8 k+1 < ... < 8 n . If P denotes the matrix whose columns are the eigenvectors, (in order from 1 to n), of A then A = PCP ?1 where C = diag 8 1 , ... , 8 n . Then / t3 v + C / x3 v=3 0 for x > 0, t > 0, where 3 v = P ?1 3 u, and the system has uncoupled into the n scalar equations /tvi + 8i/xvi = 0 for Ýx, tÞ 5 Q = áx > 0, t > 0â, 1 ² i ² n. The characteristics for these equations are the straight lines x ? 8 i t = x 0 , 8i < 0 1²i²k 8i > 0 k+1 ² i ² n For 1 ² i ² k, v i is determined in the quarter plane Q by the initial conditions v i Ýx, 0Þ = f i ÝxÞ. On the other hand, for k + 1 ² i ² n, the initial conditions alone are not sufficient to determine v i in Q. It is also necessary to specify the n ? k boundary conditions, u is composed of linear combinations of v vi s, it v i Ý0, tÞ = g i ÝtÞ, for k + 1 ² i ² n. Since 3 follows that 3 u is determined throughout Q by the data n initial conditions n ? k boundary conditions = 2n ? k conditions. More generally, 3 u is determined throughout QÝtÞ = t > 0, x ³ sÝtÞ where 8 1 < ... < 8 k < s v ÝtÞ < 8 k+1 < ... < 8 n . if we specify n initial conditions and n ? k boundary conditions at x = sÝtÞ. Now consider the quasilinear system 3Þ / x3 / t3 u + AÝu u=3 0 where A ij = /F i /u j 2 3 Þ < ... < 8 n Ýu 3 Þ. If there is curve x = sÝtÞ in and where A has real distinct eigenvalues, 8 1 Ýu 3 3 3 the x-t plane across which u jumps from u L to u R , then by analogy with the linear system, we expect that 3 L Þ < s v ÝtÞ < 8 j+1 Ýu 3L Þ 8 j Ýu j boundary conditions needed at left side of shock 3 R Þ < s v ÝtÞ < 8 k+1 Ýu 3R Þ 8 k Ýu n ? k boundary conditions needed at right side of shock Then a total of n ? k + j boundary conditions are needed. We note that the jump condition 3 Ýu 3 Ýu 3L ? 3 3L Þ ? F 3R Þ uR Þ = F s v ÝtÞ Ýu u L , and 3 u R . Since 3 uL ? 3 uR ® 3 0, we can solve for s’ in one of provides n equations relating s v , 3 the n equations so that we can eliminate s’ from the remaining equations, leaving n-1 equations satisfied along the shock curve. In order for the shock solution to be uniquely determined in R 2+ , on both sides of x = sÝtÞ, we need n ? 1 = n ? k + j or j = k ? 1. Then, in order for a shock solution to exist, the quantities s v , 3 uL, 3 u R must satisfy, for some k, 1 ² k ² n, 3 R Þ < s v ÝtÞ < 8 k+1 Ýu 3R Þ 8 k Ýu and 3 L Þ < s v ÝtÞ < 8 k Ýu 3 L Þ. 8 k?1 Ýu Ý7.1Þ If this condition holds for some k, the resulting solution is called a k-shock. We will consider some examples. Example 7.1 1. A scalar equation / t uÝx, tÞ + aÝuÞ / x uÝx, tÞ = 0. Here 8ÝuÞ = aÝuÞ, and since n = 1, there is only 8 k ÝuÞ = aÝuÞ with k = 1; there is no 3 8 k+1 nor 8 k?1 . Then (7.1) becomes 8 k Ýu R Þ < s v ÝtÞ, s v ÝtÞ < 8 k Ýu L Þ i.e., aÝu R Þ < s v ÝtÞ < aÝu L Þ which is just the previously derived entropy condition for the admissibility of a shock. 2. The p-system /t u v ? 3 uÝx, 0Þ = 0 1 /x v p ÝuÞ 0 u v Ýu L , v L Þ if x < 0 Ýu R , v R Þ if x > 0 =3 0, . We assume p v ÝuÞ > 0 and p”ÝuÞ > 0, and in this case, 3 Þ = ? p v ÝuÞ , 3 Þ = p v ÝuÞ , 8 2 Ýu 8 1 Ýu and n = 2, so there are two possible cases: k=1 3 R Þ < s v ÝtÞ < 8 2 Ýu 3 R Þ, 8 1 Ýu k=2 3 R Þ < s v ÝtÞ 8 2 Ýu Since 3L Þ s v ÝtÞ < 8 1 Ýu 3 L Þ < s v ÝtÞ < 8 2 Ýu 3 L Þ. 8 1 Ýu 3 Þ < 0 < 8 2 Ýu 3 Þ, these conditions reduce to 8 1 Ýu k=1 3 R Þ < s v ÝtÞ < 8 1 Ýu 3 L Þ < 0, 8 1 Ýu k=2 3 R Þ < s v ÝtÞ < 8 2 Ýu 3 L Þ, 0 < 8 2 Ýu k=1 (k = 1) Back Shock ? p Ýu R Þ < s v ÝtÞ < ? p v Ýu L Þ < 0, v 4 k=2 0< (k = 2) Front Shock ?p v Ýu R Þ < s v ÝtÞ < ?p v Ýu L Þ . 1-shocks and 2-shocks are also referred to as back shocks and front shocks, respectively. To find the back shock, we recall that 3 Ýu 3Þ = ? F v pÝuÞ hence, the jump conditions become s v ÝtÞÝu L ? u R Þ = ?Ýv L ? v R Þ s v ÝtÞÝv L ? v R Þ = ?ÝpÝu L Þ ? pÝu R ÞÞ. If either u L ? u R = ßuà or v L ? v R = ßvà equals zero, then they both must be zero and there is no back shock. If neither of them is zero, then we can solve for svÝtÞ in one equation and eliminate it from the other. This leads to v L ? v R = ± Ýu L ? u R ÞÝpÝu L Þ ? pÝu R ÞÞ . Now ? p v Ýu R Þ < s v ÝtÞ < ? p v Ýu L Þ < 0 implies 0 < p v Ýu L Þ < p v Ýu R Þ, and since p”ÝuÞ > 0, it follows that u L < u R ; i.e., ßuà < 0. Then substituting u L ? u R < 0, and s v ÝtÞ < 0, into the jump conditions, leads to v L ? v R < 0 and pÝu L Þ ? pÝu R Þ < 0. Then we choose the minus sign in the equation above for v L ? v R to obtain v R = v L + Ýu L ? u R ÞÝpÝu L Þ ? pÝu R ÞÞ := F B Ýu R Þ, v L ? v R < 0. Evidently, for a given 3 u L , the set of points Ýu R , v R Þ = Ýu R , F B Ýu R ÞÞ comprises the set of all states 3 u R that can be joined to 3 u L by a single back shock. If our value 3 u R falls on this curve then the initial value problem has a back shock solution with shock speed given by s v ÝtÞ = ? ßvà . ßuà If 3 u R is not on this curve then the back shock is not a physically admissible solution for the initial value problem. Note that 5 v d F B ÝuÞ = ? ÝpÝu L Þ ? pÝuÞÞ ? Ýu L ? u R Þ p ÝuÞ du 2 Ýu L ? uÞÝpÝu L Þ ? pÝuÞÞ = ?Ýu L ? uÞ pÝu L Þ ? pÝuÞ á p v ÝuÞ + â uL ? u 2 Ýu L ? uÞÝpÝu L Þ ? pÝuÞÞ >0 (since p v ÝuÞ > 0 ). In addition, it can be shown that the second derivative of F B ÝuÞ is positive and these two facts imply that v = F B ÝuÞ, the curve of admissible back shocks, appears as follows Proceeding similarly for the front shock, where s v > 0, we find ßuà > 0, ßpÝuÞà > 0, ßvà > 0 and v R = v L ? Ýu L ? u R ÞÝpÝu L Þ ? pÝu R ÞÞ := F F Ýu R Þ, v L ? v R > 0. If our value 3 u R falls on the curve Ýu R , F F Ýu R ÞÞ then the initial value problem has a front shock solution joining 3 u L to 3 u R . We can compute the first and second derivatives of F F Ýu R Þ and use the signs of these derivatives to conclude that the curve of admissible front shocks has the following appearance If neither the front shock nor the back shock is admissible, then one of the following two 6 possibilities may occur. k=1 Back Rarefaction Wave 3 3 R Þ = ? ?p v Ýu R Þ < 0 8 1 Ýu L Þ = ? ?p v Ýu L Þ < 8 1 Ýu Front Rarefaction Wave k=2 3L Þ = 0 < 8 2 Ýu 3R Þ = ?p v Ýu L Þ < 8 2 Ýu ?p v Ýu R Þ , In both of these cases, a rarefaction wave solution is of the form, 3 u=3 u x . If we let t ; = x/t then 3 u=3 uÝ;Þ satisfies u v Ý;Þ ?x / t3 uÝ;Þ = 3 t2 3 Ýu 3Þ 3 3Ý;ÞÞ = AÝu u v Ý;Þ /xF and 1 t hence 3 u v Ý;Þ ?x t2 3Þ 3 u v Ý;Þ + AÝu 1 t = 1 Ý?; 3 3Þ 3 u v Ý;ÞÞ = 3 u v Ý;Þ + AÝu 0. t 0 then ; is an eigenvalue of A with eigenvector 3 u v Ý;Þ. In this example, the If 3 u v Ý;Þ ® 3 eigenvalues of A are 3 Þ = ? p v ÝuÞ , 8 1 Ýu 3Þ = 8 2 Ýu p v ÝuÞ . 3 Þ = ? p v ÝuÞ . Then we have Consider the case ; = 8 1 Ýu ?8 1 ?1 ?p v ÝuÞ ?8 1 u v Ý;Þ v v Ý;Þ =3 0, 7 dv = ?8 1 Ýu 3 Þ = p v ÝuÞ . du 3 L Þ < 8 1 Ýu 3 R Þ which leads to pvÝu L Þ > p v Ýu R Þ, Notice that ; = 8 1 implies that we have 8 1 Ýu and this, together with p”ÝuÞ > 0, implies u L > u R . Then uR p v ÝuÞ du, vR ? vL = ? : which implies 8 1 u v Ý;Þ + v v Ý;Þ = 0; i.e., uL and we can define vR = vL ? : uR uL p v ÝuÞ du := R B Ýu R Þ, uL > uR, u L can be If this function defines a curve Ýu R , R B Ýu R ÞÞ which passes through Ýu R , v R Þ then 3 joined to 3 u R by a back rarefaction wave solution. If the curve does not pass through the point then there is no back rarefaction wave solution joining these two states. Note that R vB ÝuÞ = ? p v ÝuÞ < 0 and R ”B ÝuÞ = ?p”ÝuÞ <0 2 p v ÝuÞ 3Þ = which indicates how the curve Ýu, R B ÝuÞÞ must look. In the case ; = 8 2 Ýu proceed in a similar fashion to obtain vR = vL + : uR uL p v ÝuÞ du := R F Ýu R Þ, p v ÝuÞ , we uR > uL. u R = Ýu R , v R Þ then 3 u L can be joined to If the resulting curve Ýu R , R F Ýu R ÞÞ passes through 3 3 u R by front rarefaction wave solution. For the front fan we have R vF ÝuÞ = p v ÝuÞ > 0 and R ”F ÝuÞ = p”ÝuÞ > 0. 2 p v ÝuÞ If 3 u R = Ýu R , v R Þ lies on none of the four curves, Ýu R , F B Ýu R ÞÞ, Ýu R , F F Ýu R ÞÞ, u L the (u,v) plane can be divided into four Ýu R , R B Ýu R ÞÞ, Ýu R , R F Ýu R ÞÞ then at each point 3 regions as indicated in the figure below, Thus when 3 u R = Ýu R , v R Þ lies on none of the four curves shown in the figure, it must be that 3 u R = Ýu R , v R Þ lies in one of the four regions I, II, III, or IV. In this case, we can choose an 3 = ÝU, VÞ lying on one of the four curves and which can then be joined intermediate state U 3 . For example, to Ýu R , v R Þ by one of the four kinds of curves originating at U 8 3 = ÝU, VÞ which is joined by a front shock to 3 i) 3 u L is joined by a back fan to U uR. V = vL ? : where U uL ?p v ÝuÞ du := R B ÝUÞ, U > uL, v R = V ? ÝU ? u R ÞÝpÝUÞ ? pÝu R ÞÞ := F F Ýu R Þ, V > vR. 3 = ÝU, VÞ which is joined by a front shock to 3 ii) 3 u L is joined by a back shock to U uR where V = v L + Ýu L ? UÞÝpÝu L Þ ? pÝUÞÞ := F B ÝUÞ, v R = V ? ÝU ? u R ÞÝpÝUÞ ? pÝu R ÞÞ := F F Ýu R Þ, v L < V. V > vR 3 = ÝU, VÞ which is joined by a front fan to 3 iii) 3 u L is joined by a back shock to U uR where V = v L + Ýu L ? UÞÝpÝu L Þ ? pÝUÞÞ := F B ÝUÞ, vR = V + : uR U p v ÝuÞ du := R F Ýu R Þ, v L < V, u R > U. 3 = ÝU, VÞ which is joined by a front fan to 3 iv) 3 u L is joined by a back fan to U uR where V = vL ? : U uL vR = V + : uR U p v ÝuÞ du := R B ÝUÞ, p v ÝuÞ du := R F Ýu R Þ, U > uL, u R > U. Whether every point in the (u,v) plane is, in fact covered in a unique way by these families of curves so that the process described here can be carried out is something that can be shown (under certain conditions). Selection Principles In the section on scalar equations we showed how travelling wave solutions to the equation with artificial viscosity could be used to derive the selection principle for determining when the shock solution is physically relevant. We can try the same approach for the system 3 Ýu 3Þ = 3 0. uÝx, tÞ + / x F / t3 Ý7.2Þ 3 uÝx, 0Þ = 3 u L if x < 0 3 u R if x > 0 . 9 We consider the regularized system 3 Ýu 3 Þ = P / xx3 / t3 uÝx, tÞ + / x F uÝx, tÞ, Ý7.3Þ and look for a travelling wave solution 3 x ? =t 3 u P Ýx, tÞ = V P 3 ÝsÞ, s = x ? =t . =V P This leads to 3 ”ÝsÞ = ?= V 3 v ÝsÞ + 4F 3 V 3 ÝsÞ V 3 v ÝsÞ V Ý7.4Þ where we suppose that 3 ÝsÞ ¸ 3 V uL 3 VÝsÞ ¸ 3 uR v 3 V ÝsÞ ¸ 0 as s ¸ ?K as s ¸ +K as |s| ¸ K. Ý7.5Þ Then it will follow that as P tends to zero, this travelling wave solution, 3 u P , joining 3 u L to 3 u R , approaches the shock solution for (7.2), namely 3 uÝx, tÞ = u P Ýx, tÞ ¸ 3 3 u L if x < =t 3 u R if x > =t as P ¸ 0. To see this, note that (7.4) can be integrated once to get 3 0. 3 V 3 ? =V 3+C 3 v ÝsÞ = F V Ý7.6Þ The boundary conditions imply that 30 = F 3 0, 3 Ýu 3 Ýu 3R Þ ? = 3 3L Þ ? = 3 uL + C uR + C F or 3 Ýu 3 Ýu 3 R Þ, 3L Þ ? F 3L ? 3 uRÞ = F = Ýu and then the ODE (7.6) reduces to 3 v ÝsÞ = F 3 V 3?3 3 ?F 3 Ýu 3 L Þ ? = ÝV V u L Þ. Now the question is under what conditions can there be a solution to this ODE that joins 10 3 u L to 3 u R . To illustrate how this question might be answered, we consider an example. Example 7.2 Consider the p-system, / t uÝx, tÞ ? / x vÝx, tÞ = 0 / t vÝx, tÞ ? / x pÝuÞ = 0, where p v ÝuÞ > 0, p”ÝuÞ > 0. We replace this hyperbolic system by the system, / t uÝx, tÞ ? / x vÝx, tÞ = 0 / t vÝx, tÞ ? / x pÝuÞ = P/ xx vÝx, tÞ, and we suppose this system has a solution of the form 3 x ? =t 3 u P Ýx, tÞ = W P where 3 Ý;Þ ¸ 3 W uL 3 3 WÝ;Þ ¸ u R 3 v Ý;Þ ¸ 3 0 W 3 Ý;Þ = ßw 1 Ý;Þ, w 2 Ý;Þà B , =W as ; ¸ ? K, as ; ¸ + K as | ;| ¸ K. Ý7.7Þ Then ?= w v1 Ý;Þ ? w v2 Ý;Þ = 0, ?=w v2 Ý;Þ ? ÝpÝw 1 Ý;ÞÞÞ v = w 2 ”Ý;Þ. Ý7.8Þ After one integration, we obtain ?= w 1 Ý;Þ ? w 2 Ý;Þ = ?= w 1 ÝLÞ ? w 2 ÝLÞ = ?= w 1 ÝRÞ ? w 2 ÝRÞ, Ý7.9Þ w v2 Ý;Þ = ?=Ýw 2 Ý;Þ ? w 2 ÝLÞÞ ? ÝpÝw 1 Ý;ÞÞ ? pÝw 1 ÝLÞÞÞ where 3 u L = Ýw 1 ÝLÞ, w 2 ÝLÞÞ, 3 u R = Ýw 1 ÝRÞ, w 2 ÝRÞÞ. Then ?= Ýw 1 ÝLÞ ? w 1 ÝRÞÞ = w 2 ÝLÞ ? w 2 ÝRÞ, ?=Ýw 2 ÝLÞ ? w 2 ÝRÞÞ = pÝw 1 ÝLÞÞ ? pÝw 1 ÝRÞÞ and =2 = pÝw 1 ÝLÞÞ ? pÝw 1 ÝRÞÞ w 2 ÝLÞ ? w 2 ÝRÞ Ý7.10Þ Now it follows from (7.8) and (7.9) that ?= w v1 Ý;Þ = w v2 Ý;Þ = = 2 Ýw 1 Ý;Þ ? w 2 ÝLÞÞ ? ÝpÝw 1 Ý;ÞÞ ? pÝw 1 ÝLÞÞÞ. That is, w v1 Ý;Þ = ?=Ýw 1 Ý;Þ ? w 2 ÝLÞÞ + pÝw 1 Ý;ÞÞ ? pÝw 1 ÝLÞÞ := GÝw 1 Ý;ÞÞ. = 11 Note that GÝw 1 ÝLÞÞ = 0, and, as a result of (7.10), GÝw 1 ÝRÞÞ = 0. In the case that w 1 ÝLÞ < w 1 ÝRÞ, as ; goes from minus infinity to plus infinity, w 1 Ý;Þ increases from w 1 ÝLÞ to w 1 ÝRÞ if and only if w v1 Ý;Þ > 0 for all ; 5 R. This is the same as requiring GÝw 1 Þ > 0 for w 1 ÝLÞ < w 1 < w 1 ÝRÞ. That is, ?=Ýw 1 Ý;Þ ? w 2 ÝLÞÞ + or pÝw 1 Ý;ÞÞ ? pÝw 1 ÝLÞÞ > 0, = pÝw 1 Ý;ÞÞ ? pÝw 1 ÝLÞÞ pÝw 1 ÝLÞÞ ? pÝw 1 ÝRÞÞ > =2 = w 2 ÝLÞ ? w 2 ÝRÞ w 1 Ý;Þ ? w 2 ÝLÞ -; 5 R. This last form of the condition for the existence of a TW solution joining w 1 ÝLÞ to w 1 ÝRÞ and hence 3 u L to 3 u R is somewhat like the condition that in order to have a TW solution for the scalar equation we considered, the wave speeds for the scalar conservation law must be such that the heteroclinic orbit associated with the TW solution travel from u L to u R . In the case that w 1 ÝLÞ > w 1 ÝRÞ, we want w v1 Ý;Þ < 0 for all ; 5 R which leads to the opposite of the inequality above. 12