Quadratic finite-volume methods for elliptic and parabolic problems on
advertisement

IMA Journal of Numerical Analysis (2013) 33, 1342–1364
doi:10.1093/imanum/drs045
Advance Access publication on March 28, 2013
Quadratic finite-volume methods for elliptic and parabolic problems on
quadrilateral meshes: optimal-order errors based on Barlow points
Min Yang∗
Department of Mathematics, Yantai University, Yantai, Shandong, China
∗
Corresponding author: yang@ytu.edu.cn
and
Yanping Lin
Department of Applied Mathematics, Hong Kong Polytechnic University, Hung Hom, Hong Kong and
Department of Mathematical and Statistics Science, University of Alberta, Edmonton, AB, Canada
T6G 2G1
malin@polyu.edu.hk yanlin@ualberta.ca
[Received on 10 December 2011; revised on 30 June 2012]
This paper presents quadratic finite-volume methods for elliptic and parabolic problems on quadrilateral
meshes that use Barlow points (optimal stress points) for dual partitions. Introducing Barlow points into
the finite-volume formulations results in better approximation properties at the cost of loss of symmetry.
The novel ‘symmetrization’ technique adopted in this paper allows us to derive optimal-order error estimates in the H 1 - and L2 -norms for elliptic problems and in the L∞ (H 1 )- and L∞ (L2 )-norms for parabolic
problems. Superconvergence of the difference between the gradients of the finite-volume solution and the
interpolant can also be derived. Numerical results confirm the proved error estimates.
Keywords: Barlow points; error estimation; elliptic boundary value problems; finite-volume element
methods; parabolic equations; quadrilateral meshes.
1. Introduction
Finite-volume methods have been widely used in scientific computing and engineering applications due
to their local conservation properties and easy implementation. However, most finite-volume methods
are low order. Development of higher order finite-volume methods has been an active research area, as
reflected in Cai et al. (2003), Chen (2010), Chen et al. (2011), Gao & Wang (2010), Hackbusch (1989),
Hyman et al. (1992), Plexousakis & Zouraris (2004), Wang & Gu (2010), Xu & Zou (2009), Yang
(2006), Yang et al. (2009), Yang & Liu (2011), Yu & Li (2010, 2011) and the references therein.
This paper is a continuation of our efforts in Yang (2006), Yang et al. (2009), Yang & Liu (2011)
on developing quadratic finite-volume methods for elliptic and parabolic problems. It was discussed
in Yang & Liu (2011) that the quadratic finite-volume method based on the Simpson quadrature for
parabolic problems on quadrilateral meshes has an optimal convergence rate in the L2 (H 1 )-norm, but
there are technical difficulties in deriving error estimates in the L∞ (H 1 )- and L∞ (L2 )-norms that are
c The authors 2013. Published by Oxford University Press on behalf of the Institute of Mathematics and its Applications. All rights reserved.
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Jiangguo Liu
Department of Mathematics, Colorado State University, Fort Collins, CO 80523-1874, USA
liu@math.colostate.edu
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
1343
2. Quadratic finite volumes and mesh assumptions
Let Ωh = {Q} be a quadrilateral partition of Ω, where any two closed quadrilaterals share a common
edge, vertex or nothing. Let Q̂ = [−1, 1]2 be the reference element in the x̂ŷ-plane. For each element
Q ∈ Ωh , there exists a bijective bilinear mapping FQ : Q̂ −→ Q satisfying
FQ (P̂i ) = Pi ,
1 i 4.
Let JFQ be the Jacobian matrix of FQ at x̂ and JFQ = det JFQ , and accordingly, JFQ−1 the Jacobian
matrix of FQ−1 at x and JFQ−1 = det JFQ−1 . Based on the partition Ωh , we define Sh as the standard conforming finite-element space of piecewise affine biquadratic functions
Sh = {v ∈ H01 (Ω) : v|Q = v̂ ◦ FQ−1 , v̂|Q̂ is biquadratic, ∀ Q ∈ Ωh ; v|∂Ω = 0}.
(2.1)
Let Ih : H01 (Ω) ∩ H 3 (Ω) → Sh be the usual nodal interpolation operator. It is well known (see Brenner & Scott, 2008) that
(2.2)
u − Ih ur h3−r u3 , 0 r 2.
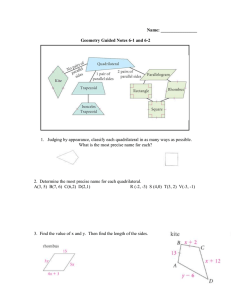
In order to establish finite-volume element schemes, we introduce a dual partition Ωh∗ , whose elements are called control volumes. As shown in Fig.
√ 1, each edge of Q ∈ Ωh is partitioned into three
segments so that the ratio of these segments is 1 : 3 + 1 : 1. We connect these partition points with
line segments to the corresponding ones on the opposite edge. This way, each quadrilateral in Ωh is
divided into nine sub-quadrilaterals Qz , z ∈ Zh (Q), where
Zh (Q) is the set of the vertices, the midpoints
of edges and the centre of Q. For each node z ∈ Zh = Q∈Ωh Zh (Q), we associate a control volume Vz ,
which is the union of the subregions Qz containing the node z. Therefore, we obtain a collection of
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
similar to those for the finite-element methods. The main reason for this deficiency is that we were
unable to derive an optimal L2 -norm error estimate for the Ritz projection. Such deficiency exists on
triangular and quadrilateral meshes, see Li et al. (2000), Liebau (1996), Xu & Zou (2009) and Yang
(2006). In this paper, we utilize Barlow points (Barlow, 1976) for constructing dual volumes and developing quadratic finite-volume methods for elliptic and parabolic problems on quadrilateral meshes. Now
we are able to derive optimal-order error estimates in the L∞ (H 1 )- and L∞ (L2 )-norms. We have also
superconvergence for the errors between the interpolation and the finite-volume solution. A novel contribution of this paper is the ‘symmetrization’ technique that enables us to overcome certain difficulties
in the theoretical analysis.
Throughout the paper, we use the standard notations for the Sobolev spaces W m,p (Ω) with the norm
· m,p,Ω and the seminorm | · |m,p,Ω . We also denote W m,2 (Ω) by H m (Ω) and skip the index p = 2
and the domain Ω, when there is no ambiguity, that is, um,p = um,p,Ω , um = um,2,Ω . The same
convention is adopted for the seminorms. We will also use A B and B A to denote A CB, where
C is an absolute constant that may take different values in different appearances but is independent of
spatial and temporal discretizations. Moreover, A ∼ B denotes that A B and B A.
The rest of this paper is organized as follows. In Section 2, we discuss Barlow points, construction
of dual volumes and mesh assumptions. Finite-volume methods for elliptic and parabolic problems on
quadrilateral meshes are presented in Section 3. Section 4 is devoted to error estimation of the developed
finite-volume schemes. Section 5 presents numerical results to illustrate the error estimates. Section 6
concludes the paper with some remarks.
1344
M. YANG ET AL.
3
2.5
2
1.5
0.5
0
0
0.5
1
1.5
2
2.5
3
Fig. 1. An 8 × 8 quadrilateral mesh with random O(h)-scale perturbations in both x, y-directions.
control volumes covering the domain Ω. This is the dual partition Ωh∗ of the primal partition Ωh . We
denote the set of interior nodes of Zh by Zh0 .
Remark 2.1 The dual partition introduced here is different from the one defined in Yang & Liu (2011),
where the sub-quadrilaterals Qz are built by using the points related to the Simpson quadrature and the
partition ratio is 1:4:1. The control volumes in this paper are based on the Barlow points (the optimal
stress points). The set of the Barlow points for one-dimensional Lagrange quadratic finite element is
N2 = F N̂2 , where F is an invertible affine mapping from the reference element [−1, 1] to a generic
interval [a, b], and
√ √ 3
3
,
N̂2 = −
.
3
3
Let x1 = −1, x2 = 0, x3 = 1 and Li (x), i = 1, 2, 3 be the corresponding Lagrange quadratic basis functions. The derivative of the interpolant at the Barlow points satisfies (Barlow, 1976)
3
x3i Li (x) = 0,
(2.3)
x3 −
√
i=1
x=± 3/3
which means that the stresses are the most accurate at the Barlow points. The property (2.3) is critical
for obtaining a superconvergence result for the term ah (u − Ih u, Ih∗ vh ); see Lemma 4.3.
Remark 2.2 Finite-volume methods based on the Barlow points (the optimal stress points) have been
previously studied on one-dimensional (see, e.g., Gao & Wang, 2010) and two-dimensional rectangular
meshes, see, e.g., Wang & Gu (2010) and Yu & Li (2010, 2011). But the extension of the methods to
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
1
1345
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
P4
P1'
P43
P34
P41
Q
z
P3
P32
Qz
P14
P4 '
P23
P1
1
P12
3 +1
P21
1
P2
more general quadrilateral meshes is not straightforward. The distortion of transformation might destroy
the superconvergence property. A delicate analysis should be established to measure the effect of such
distortion.
We make some assumptions on the quadrilateral mesh Ωh as follows. For any Q ∈ Ωh , let hQ be its
diameter, hQ the smallest length of the edges and θQ any interior angle. We set h = maxQ∈Ωh hQ .
(1) Mesh Assumption A. The mesh Ωh = {Q} is regular, that is, there exist two positive constants σ
and γ such that
(2.4)
hQ /hQ σ , | cos θQ | γ < 1, ∀ Q ∈ Ωh .
(2) Mesh Assumption B. The quadrilateral mesh is ‘asymptotically parallelogram’. Namely, for each
element Q ∈ Ωh , one has
(2.5)
P1 − P2 + P3 − P4 = O(h2 ),
where Pi , i = 1, 2, 3, 4 are the four vertices of Q.
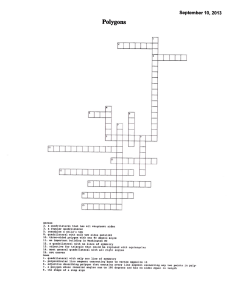
(3) Mesh Assumption C. Any two adjacent quadrilaterals (see Fig. 2) form an h2 -parallelogram in
the sense that
(2.6)
P4 + P1 − 2P3 = O(h2 ).
These assumptions have been respectively adopted in Arnold et al. (2002), Chou & He (2002), Ewing
et al. (1999) and Yang & Liu (2011).
3. Finite-volume schemes for elliptic and parabolic problems
We first consider a model elliptic boundary value problem
∇ · (−a(x)∇u) = f (x),
u = 0,
x ∈ Ω,
x ∈ ∂Ω,
(3.1)
where Ω is a bounded polygonal domain in R2 with boundary ∂Ω and x = (x, y). It is assumed that
f (x) ∈ L2 (Ω) and a(x) is Lipschitz continuous and bounded almost everywhere with positive lower and
upper bounds a∗ and a∗ .
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Fig. 2. Dual volumes and adjacent quadrilaterals.
1346
M. YANG ET AL.
Given a node z ∈ Zh0 , integrating the first equation in (3.1) over the control volume Vz and applying
the Green’s formula, we obtain
−
a∇u · n ds =
f dx,
(3.2)
∂Vz
Vz
where n denotes the unit outer normal on ∂Vz .
We further introduce a transfer operator Ih∗ : Sh → Sh∗ from the trial space to the test space such that
Ih∗ v =
v(z)Ψz ,
(3.3)
where
Sh∗ = {v ∈ L2 (Ω) : v|Vz is constant, ∀ z ∈ Zh0 ; v|Vz = 0, ∀ z ∈ ∂Ω},
(3.4)
and Ψz is the characteristic function of the control volume Vz . Then we multiply (3.2) by vh (z) and sum
over all z ∈ Zh0 to obtain an integral conservation form for elliptic problem
ah (u, Ih∗ vh ) = (f , Ih∗ vh ),
∀ vh ∈ Sh ,
(3.5)
where the bilinear form ah (·, Ih∗ ·) is defined as: for any u ∈ H01 (Ω), vh ∈ Sh ,
ah (u, Ih∗ vh ) = −
vh (z)
z∈Zh0
∂Vz
a∇u · n ds.
(3.6)
A finite-volume scheme for elliptic problem (3.1) is formulated as: Seek uh ∈ Sh such that
ah (uh , Ih∗ vh ) = (f , Ih∗ vh ),
∀ vh ∈ Sh .
(3.7)
A model parabolic initial boundary value problem can be formulated as
⎧
⎪
⎨ut − ∇ · (a(x)∇u) = f (x, t),
u = 0,
⎪
⎩
u(x, 0) = u0 (x),
(x, t) ∈ Ω × (0, T],
(x, t) ∈ ∂Ω × (0, T],
x ∈ Ω,
(3.8)
where f (x, t) ∈ L2 (Ω) for t ∈ [0, T] and other terms follow the same assumptions for the elliptic problem.
A semidiscrete finite-volume scheme for (3.8) is accordingly defined as: Seek uh (t) ∈ Sh for t ∈ (0, T]
such that for any vh ∈ Sh ,
(uh,t , Ih∗ vh ) + ah (uh , Ih∗ vh ) = (f , Ih∗ vh )
(3.9)
with an initial approximation uh (0) given by uh (0) = Rh u0 , where Rh : H01 (Ω) ∩ H 3 (Ω) → Sh is the
elliptic (Ritz) projection defined by
ah (Rh u, Ih∗ vh ) = ah (u, Ih∗ vh ),
∀ vh ∈ Sh .
(3.10)
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
z∈Zh0
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
1347
Remark 3.1 Let {Φz : z ∈ Zh0 } and {Ψz : z ∈ Zh0 } be the standard basis functions of Sh and Sh∗ , respectively.
Then scheme (3.9) can be rewritten as a system of ordinary differential equations
M α (t) + S α(t) = f˜ (t),
0 t T;
α(0) = β,
(3.11)
where M = ((Φz , Ψw ))zw and S = (ah (Φz , Ψw ))zw are the mass and stiffness matrices, respectively, and
α(t) and β are vectors of the nodal values of uh (t) and Rh u0 , respectively. From Lemmas 4.1 and 4.4,
we know that both M and S are invertible. This implies that there exists a unique solution uh (·, t) on
Ω × [0, T].
n−1
n
¯ nh = uh − uh ,
∂u
Δt
n,1/2
uh
=
unh + un−1
h
.
2
A Crank–Nicolson fully discrete (Thomée, 2006) finite-volume scheme for (3.8) seeks unh ∈ Sh such
that for any vh ∈ Sh ,
¯ nh , Ih∗ vh ) + ah (un,1/2
(∂u
, Ih∗ vh ) = (f n,1/2 , Ih∗ vh ), n 1,
(3.12)
h
with an initial approximation given by u0h = Rh u0 .
Remark 3.2 The scheme (3.12) takes a form as follows
(M + 12 ΔtS )α n = (M − 12 ΔtS )α n−1 + Δtf˜ n,1/2 ,
Generally, M and S are not symmetric. But by Lemmas 4.1 and 4.4, we know that both M + M T
and S + S T are positive definite. So, for any nonzero vector x,
xT (M + 12 ΔtS )x = 12 xT (M + M T )x + 14 ΔtxT (S + S T )x > 0,
which means M + 12 ΔtS is invertible. Therefore, (3.12) can be solved uniquely at each time step.
4. Error estimates
For simplicity of presentation, we assume that the coefficient a(x) ≡ 1 in this section. If a(x) is nonconstant, we can have a perturbation argument by taking the piecewise constant approximation in each
element Q. Then all results will still hold for h small enough; see Yang & Liu (2011) for details.
4.1
Basic approximation properties
It is assumed that there exist a pair of integers nx , ny such that the cardinality of Ωh is equal to nx ny ,
and we can assign each Q ∈ Ωh a pair of integers (i, j), where 0 i nx − 1, 0 j ny − 1. Thus we
label Q by subscripts (i, j) and denote its vertices by xi,j , xi+1,j , xi+1,j+1 , xi,j+1 , corresponding to P1 , P2 ,
P3 , P4 in Fig. 2. Let νi , νj = 0 or 12 . Then the midpoints of the edges of Q are denoted by xi+νi ,j+νj , where
νi + νj = 12 , and the centre of Q denoted by xi+1/2,j+1/2 .
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Let N be a positive integer. For simplicity of presentation, we consider a uniform time step Δt =
T/N and set tn = nΔt (0 n N). For n 1, let
1348
M. YANG ET AL.
Similar to Yang & Liu (2011), we now define some discrete norms on Sh . For any uh ∈ Sh ,
|uh |20 = (uh , Ih∗ uh ),
|uh |21,h =
Q∈Ωh
+
|uh |21,h,Q =
⎡
⎣
Q∈Ωh
(4.1)
(δx uh (xi+νi ,j+νj ))2
νi =1/2,1 νj =0,1/2,1
⎤
(δy uh (xi+νi ,j+νj ))2 ⎦ ,
(4.2)
νi =0,1/2,1 νj =1/2,1
δx uh (xi+νi ,j+νj ) = uh (xi+νi ,j+νj ) − uh (xi+νi − 12 ,j+νj ),
δy uh (xi+νi ,j+νj ) = uh (xi+νi ,j+νj ) − uh (xi+νi ,j+νj − 12 ).
The following lemma reveals that the discrete norms are equivalent to the continuous norms.
Lemma 4.1 Assume that Ωh satisfies Mesh Assumption A. For any uh ∈ Sh , we have
|uh |0 ∼ uh 0 ,
(4.3)
|uh |1,h ∼ |uh |1 .
(4.4)
Proof. Since the mesh is regular, we have
1/2
ûh 0,Q̂ JFQ−1 ∞,Q uh 0,Q ,
1/2
uh 0,Q JFQ ∞,Q̂ ûh 0,Q̂ ,
where
JFQ−1 ∞,Q h−2
Q ,
JFQ ∞,Q̂ h2Q .
Therefore,
hQ ûh 0,Q̂ uh 0,Q hQ ûh 0,Q̂ .
For
Q
(4.5)
uh Ih∗ uh dx, we have a similar estimate as follows
h2Q
Q̂
∗
û2h I
h uh
dx̂ Q
uh Ih∗ uh
dx h2Q
Q̂
∗
û2h I
h uh dx̂.
(4.6)
Let
ϕ1 (x) = 12 x(x − 1),
ϕ2 (x) = (1 − x)(x + 1),
ϕ3 (x) = 12 x(x + 1)
be the local quadratic basis
1]. Let√ψi (x), 1 i√ 3 be the characteristic functions associated
√ on [−1,√
with the partitions [−1, − 3/3], [− 3/3, 3/3] and [ 3/3, 1], respectively. Then using the standard
tensor-product basis and the resulting interpolation form of ûh on the reference element, we obtain
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
where
1349
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
immediately
1
T
T
T T
∗
ûh I
h uh dx̂ = uQ (G2 ⊗ G2 )uQ = uQ (G2 ⊗ G2 + G2 ⊗ G2 )uQ ,
2
Q̂
ûh 20,Q̂ = uQ (G1 ⊗ G1 )uTQ ,
where uQ ∈ R9 is a vector consisting of the nodal values of uh on Q and
⎤
−1
2 ⎦,
4
√
36 − 16 3
√
32 3
√
36 − 16 3
√ ⎤
− 3
√ ⎥
2 3 ⎦.
√
18 − 3
It is easy to verify that G1 and G2 ⊗ G2 + G2T ⊗ G2T are symmetric and positive definite. Thus ûh 20,Q̂
∗
and Q̂ ûh I
h uh dx̂ are equivalent. Applying (4.5) and (4.6) and summing the result over Ωh yield estimate
(4.3). Estimate (4.4) was proved in Yang (2006).
We shall often use the Bramble–Hilbert lemma (Brenner & Scott, 2008) as recapped below.
Lemma 4.2 (Bramble–Hilbert lemma) Let L(u) be a continuous linear functional on W m,p (Ω) and
W m,p (Ω) be its dual norm. If L(u) vanishes for all u ∈ Pm−1 , then there exists a constant C = C(Ω)
such that
|L(u)| C|L|W m,p (Ω) |u|W m,p (Ω) .
4.2
(4.7)
Error estimates for the elliptic problem
The bilinear form ah (u, Ih∗ vh ) can be rewritten as
ah (u, Ih∗ vh ) =
Q∈Ωh
=
aQ,h (u, Ih∗ vh ) =
Q∈Ωh
⎛
⎝
Q∈Ωh
⎛
⎝−
vh (z)
z∈Zh ∩Q
(vh (z1 ) − vh (z2 ))
∂Vz ∩Q
∇u · n ds⎠
⎞
z1 ,z2 ∈Zh ∩Q
⎞
∂Vz1 ∩∂Vz2
∇u · n ds⎠ ,
(4.8)
where z1 , z2 are chosen in Q with no repetition. Applying the affine transformation FQ , we have
∂Vz1 ∩∂Vz2
∇u · n ds = −
∂Vẑ1 ∩∂Vẑ2
(ûx̂ b11 + ûŷ b12 ) dŷ +
∂Vẑ1 ∩∂Vẑ2
(ûx̂ b21 + ûŷ b22 ) dx̂,
(4.9)
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
⎡
4
1 ⎣
2
=
15 −1
i,j=1
3
ϕi ϕj dx
2
16
G1 =
−1
2
√
⎡
18 − 3
1
3
1 ⎢ √
G2 =
ψi ϕj dx
=
⎣ 2 3
54
√
−1
i,j=1
− 3
1
1350
M. YANG ET AL.
where
b11 = JF−1
Q
∂x
∂ ŷ
2
+
∂y
∂ ŷ
2 ,
∂x ∂x ∂y ∂y
+
,
∂ x̂ ∂ ŷ ∂ x̂ ∂ ŷ
2 ∂y
∂x 2
−1
+
.
b22 = JFQ
∂ x̂
∂ x̂
b12 = b21 = −JF−1
Q
|α|
|Dα bij | hQ ,
α 0, i, j = 1, 2
).
(4.10)
follows from the Leibniz rule.
Next we prove a superapproximation result for ah (u − Ih u, Ih∗ vh ).
Lemma 4.3 Assume that Ωh satisfies Mesh Assumptions A, B and C. If u ∈ H 4 (Ω) and vh ∈ Sh , then
|ah (u − Ih u, Ih∗ vh )| h3 u4 |vh |1 .
(4.11)
Proof. Let w = u − Ih u. Using (4.8) and (4.9) gives
ah (w, Ih∗ vh ) =
aQ,h (w, Ih∗ vh )
Q∈Ωh
with
aQ,h (w, Ih∗ vh ) = −
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
ẑ1 ,ẑ2 ∈Zˆh ∩Q̂
+
∂Vẑ1 ∩∂Vẑ2
(ŵx̂ b11 + ŵŷ b12 ) dŷ
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
ẑ1 ,ẑ2 ∈Zˆh ∩Q̂
∂Vẑ1 ∩∂Vẑ2
(ŵx̂ b21 + ŵŷ b22 ) dx̂.
(4.12)
We only need to estimate the first term which includes the line integral along the ŷ direction. The integral
along the x̂ direction√can be estimated similarly.
Note that x̂ = ± 3/3 in the first integral. By estimate (2.3) and the definition of the interpolation
Ih , we have ŵx̂ = 0 for û = x̂i ŷj , 0 i + j 3. Hence, the Bramble–Hilbert lemma and (4.10) yield
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
ŵx̂ b11 dŷ |û|4,Q̂
|v̂h (ẑ1 ) − v̂h (ẑ2 )|
−
∂Vẑ1 ∩∂Vẑ2
ẑ1 ,ẑ2 ∈Ẑh ∩Q̂
z1 ,z2 ∈Zh ∩Q
h3Q u4,Q |vh (z1 )
ẑ1 ,ẑ2 ∈Ẑh ∩Q̂
− vh (z2 )| h u4,Q |vh |1,h,Q .
3
(4.13)
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
−2+|α|
Differentiating the identity JFQ JFQ−1 = 1 and applying math induction, we have Dα JFQ−1 = O(hQ
Then the estimate (Zlámal, 1978)
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
The estimation for
−
1351
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
∂Vẑ1 ∩∂Vẑ2
ẑ1 ,ẑ2 ∈Zˆh ∩Q̂
ŵŷ b12 dŷ
∂Vẑ1 ∩∂Vẑ2
ẑ1 ,ẑ2 ∈Ẑh ∩Q̂
−b̄12
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
ẑ1 ,ẑ2 ∈Ẑh ∩Q̂
∂Vẑ1 ∩∂Vẑ2
We introduce a quadrature formula to approximate
√
− 3/3
−1
and
f dŷ ≈
√
√
− 3/3
−1
3/3
Denoting by
have
√
− b̄12
ŵŷ dŷ. For any function f (ŷ),
√ 3
f dŷ ≈ √ f
dŷ
√
3
3/3
3/3
1
1
3/3
ŵŷ dŷ the approximation of
∂Vẑ1 ∩∂Vẑ2
(4.14)
√ √ 3
3
f −
+f
dŷ.
√
3
3
− 3/3
app
∂Vẑ1 ∩∂Vẑ2
√ 3
f −
dŷ,
3
1
f dŷ ≈
√
2
− 3/3
ŵŷ dŷ + Ch3 u3,Q |vh |1,h,Q .
∂Vẑ1 ∩∂Vẑ2
√
app
ŵŷ dŷ. Noting that ŷ = ± 3/3 in ŵŷ , we
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
ẑ1 ,ẑ2 ∈Ẑh ∩Q̂
where
R1 =
∂Vẑ1 ∩∂Vẑ2
ŵŷ d ŷ b̄12 R1 + Ch3 u4,Q |vh |1,h,Q ,
(4.15)
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
ẑ1 ,ẑ2 ∈Ẑh ∩Q̂
app
∂Vẑ1 ∩∂Vẑ2
(ŵŷ − ŵŷ ) dŷ.
To estimate term R1 , we construct an auxiliary functional
√ 1 2
1 2
3
∂ ŵ(1, ŷ) ∂ v̂h (1, ŷ)
∂ ŵ(−1, ŷ) ∂ v̂h (−1, ŷ)
dŷ −
dŷ .
F1 =
18
∂ ŷ2
∂ ŷ
∂ ŷ2
∂ ŷ
−1
−1
Set L(û) = R1 + F1 . If û = x̂i ŷj , 0 i, j 2, then ŵ = 0. If û = x̂3 , then ŵy = 0. If û = ŷ3 , a direct calculation produces
√
4 3 ∂ 3 v̂h
3
3
(0, 0).
R1 |û=ŷ = −F1 |û=ŷ = −
9 ∂ x̂∂ ŷ2
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
is technically involved. A starting point is to use (2.3) to get a superconvergence. But note that ŷ ∈
[−1, 1] and ŵŷ vanishes only for û = x̂i ŷj , 0 i, j 2. So, we shall construct a quadrature formula, in
√
which ŷ is fixed at ± 3/3, to approximate the integral. Then applying Mesh Assumption C, we find
that the lower order parts of the sum of the truncation terms on all elements can be cancelled on the
element edges.
For each element Q, let b̄12 be the average value of b12 . By (4.10), we have b12 = b̄12 + O(hQ ). Then
−
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
ŵŷ b12 dŷ
1352
M. YANG ET AL.
Thus L(û) vanishes for û = x̂i ŷj , 0 i + j 3. Note that L(û) is a linear functional of û. By the Bramble–
Hilbert lemma and the norm equivalence in the finite-dimensional spaces, we have
L(û) û4,Q̂ (|v̂h (ẑ1 ) − v̂h (ẑ2 )| + v̂h H 1 (∂ Q̂) )
û4,Q̂ (|v̂h |1,h,Q̂ + |v̂h |1,Q̂) ) h3 u4,Q |vh |1,Q .
Since R1 = L(û) − F1 , combining (4.14) to (4.16) together yields
−
(v̂h (ẑ1 ) − v̂h (ẑ2 ))
ŵŷ b12 dŷ h3 u4,Q |vh |1,Q − b̄12 F1 .
(4.17)
∂Vẑ1 ∩∂Vẑ2
The estimation for the second integral in (4.12) is similar. Hence,
aQ,h (w, Ih∗ vh ) h3 u4,Q (|vh |1,h,Q + |vh |1,Q ) − b̄12 F1 − b̄21 F2 ,
where F2 is a functional similar to F1 , with ŷ being replaced by x̂. Therefore,
∗
3
b̄12 F1 + b̄21 F2 .
|ah (w, Ih vh )| h u4 (|vh |1,h + |vh |1 ) + Q∈Ωh
Q∈Ωh
(4.18)
The sum Q∈Ωh b̄ij Fi (û) involves integrals on the edges of Q. On ∂Q ∩ ∂Ω, the corresponding
integrals vanish because vh |∂Ω = 0. On an interior edge ∂Q ∩ ∂Q , the integrals from Q and Q are taken
for the same integrand but in opposite directions. Thus we can regroup the sum by edges to obtain the
following terms on the interior edges
√
√
1 2
1 2
3
∂ ŵ(1, ŷ) ∂ v̂h (1, ŷ)
3
∂ ŵ(ŷ, 1) ∂ v̂h (x̂, 1)
(b̄12 − b̄12 )
dŷ,
(b̄21 − b̄21 )
dx̂.
2
18
∂
ŷ
∂
ŷ
18
∂ x̂2
∂ x̂
−1
−1
Under our mesh assumptions, |b̄ij − b̄ij | is O(h) (see, e.g., Zlámal, 1978). Therefore, it follows from the
Bramble–Hilbert lemma that
+
b̄
b̄
F
(û)
F
(û)
12 1
21 2
Q∈Ωh
Q∈Ωh
1 ∂ 2 ŵ(1, ŷ) ∂ v̂h (1, ŷ) 1 ∂ 2 ŵ(x̂, 1) ∂ v̂h (x̂, 1) h
dŷ + dx̂
2
2
∂
ŷ
∂
ŷ
∂
x̂
∂
x̂
−1
−1
Q∈Ωh
h
û3,Q̂ |v̂h |1,Q̂ h3 u3 |vh |1 .
(4.19)
Q∈Ωh
Combining (4.18) and (4.19) together and using the norm equivalence give the desired result.
Lemma 4.4 Assume that Ωh satisfies Mesh Assumptions A and B. Then
|ah (uh , Ih∗ vh )| |uh |1 |vh |1 ,
ah (uh , Ih∗ uh ) |uh |21 ,
∀ uh , vh ∈ Sh ,
∀ uh ∈ Sh .
(4.20)
(4.21)
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
ẑ1 ,ẑ2 ∈Ẑh ∩Q̂
(4.16)
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
1353
Proof. The continuity (4.20) has been proved in Yang & Liu (2011). The coercivity (4.21) holds when
| cos θQ | < 0.99. The proof is to decompose the distortion of affine mappings into contraction and rotation and to employ partitioned matrices for size reduction, which is the same as that for Lemma 3.8 in
Yang & Liu (2011) and is also similar to that for Lemma 4.5 in this paper.
Theorem 4.1 Let u be the solution of (3.1) and uh the finite-volume solution of (3.7). Assume that
u ∈ H 4 (Ω) ∩ H01 (Ω). If Mesh Assumptions A, B and C are satisfied, then
u − uh 0 + h|u − uh |1 + |Ih u − uh |1 h3 u4 .
(4.22)
|ξ |21 ah (ξ , Ih∗ ξ ) = ah (η, Ih∗ ξ ).
It follows from Lemma 4.3 that
ah (η, Ih∗ ξ ) h3 u4 |ξ |1 .
Therefore,
|ξ |1 h3 u4 .
The approximation property (2.2) and a triangle inequality lead to
|u − uh |1 |ξ |1 + |η|1 h2 u4
and
u − uh 0 ξ 0 + η0 |ξ |1 + η0 h3 u4 ,
which complete the proof.
Remark 4.1 We have obtained a superapproximation result for |Ih u − uh |1 in Theorem 4.1. This superconvergence not only helps us to derive optimal-order error estimates in the L2 -norm, but can also be
used for developing a posteriori error estimators or postprocessing algorithms, which will be pursued
in our future work. The superconvergence is based on the Barlow points and Mesh Assumption A, B
and C. If only Mesh Assumptions A and B are considered, then the optimal order L2 error estimate can
also be obtained by using a duality argument and comparison with the finite-element bilinear forms.
4.3
Error estimates for the parabolic problem
According to Lemma 4.1, utilizing the Barlow points results in the term
T
∗
ûh I
h vh dx̂ = vQ G2 ⊗ G2 uQ
(4.23)
Q̂
being nonsymmetric, since G2 is nonsymmetric. We intend to ‘symmetrize’ the above bilinear form on
the reference element.
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Proof. We decompose the error as uh − u = ξ − η, where ξ = uh − Ih u and η = u − Ih u. By (3.5), (3.7),
and Lemma 4.4, we have
1354
M. YANG ET AL.
Lemma 4.5 For any uh , vh ∈ Sh , there exist ũh , ṽh ∈ Sh such that
∗
∗
ûh Ih ṽh dx̂ = v̂h I
h ũh dx̂,
Q̂
(4.24)
Q̂
(uh , Ih∗ ũh )1/2 ∼ uh 0 ,
(4.25)
|ũh |1,h ∼ |uh |1,h ,
(4.26)
ah (uh , Ih∗ ũh ) |uh |21 .
(4.27)
The second step is to verify (4.24–4.26). By the proof of Lemma 3.1, we have
T
∗
ûh I
ṽQ G2 ⊗ G2 uQ
h ṽh dx̂ =
Q̂
Q∈Ωh
=
(vTQ D ⊗ D)G2 ⊗ G2 uQ =
Q∈Ωh
Let
vTQ (DG2 ) ⊗ (DG2 )uQ .
(4.28)
Q∈Ωh
⎡
8
1
⎣2
G˜2 = DG2 =
27 −1
2
32
2
⎤
−1
2 ⎦.
8
Then (4.24) follows by the symmetry of G˜2 . On the other hand, according to Lemma 4.1, in order to
∗
prove (4.25), we only need to prove that Q̂ ûh I
h ṽh dx̂ is a quadratic form on uQ , which is straightforward
by the positive definiteness of matrix G˜2 .
For any uh ∈ Sh , let α = (ux,Q , uy,Q ) be a vector with ux,Q , uy,Q ∈ R6 defined as
ux,Q = (δx uh (xi+1/2,j ), δx uh (xi+1/2,j+1/2 ), δx uh (xi+1/2,j+1 ), . . . , δx uh (xi+1,j+1 )),
uy,Q = (δy uh (xi,j+1/2 ), δy uh (xi+1/2,j+1/2 ), δy uh (xi+1,j+1/2 ), . . . , δy uh (xi+1,j+1 ) .
Since ũTQ = uTQ D ⊗ D, a direct calculation yields
ũTx,Q = uTx,Q P ⊗ D,
where
ũTy,Q = uTy,Q P ⊗ D,
!
√
1 3+2 3
√
P=
6 3−2 3
√ "
3−2 3
√ .
3+2 3
(4.29)
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Proof. The proof consists of three major steps.
The first step is to construct ũh for any uh ∈ Sh . Assume that ũh has the form ũTQ = uTQ D ⊗ D. Utilizing a computer algebra system, e.g., Matlab, we obtain (generally not unique though)
√
⎤
⎡
6 3−2 3 0
√
1⎢
⎥
D = ⎣0
4 3
0⎦ .
6
√
0 3−2 3 6
1355
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
y
ŷ
Q
Q̂
P̂4
1
–1
0
1
P̂1
–1
P̂2
P3
P4
P̂3
FQ
P2
P1
x̂
0
x
Noting that P and D are nonsingular, we have
|ũh |21,h,Q = (ũTx,Q ũx,Q + ũTy,Q ũy,Q ) ∼ (uTx,Q ux,Q + uTy,Q uy,Q ) = |uh |21,h,Q .
The third step is to prove (4.27), which uses Lemma 4.6 about partitioned matrices that was proved
in Yang (2006).
Let P1 , P2 be two points. We use |P1 P2 | to denote its length. Without loss of generality, we choose
θQ = P4 P1 P2 and suppose that Q is a parallelogram with two edges P1 P2 and P1 P4 (see Fig. 3). According to Lemma 3.6 in Yang & Liu (2011), under Mesh Assumptions A and B, the difference between the
bilinear form ah (uh , Ih∗ vh ) on a quadrilateral and the one on a parallelogram is O(h)|uh |1 |vh |1 . In order
to prove (4.27), we only need to prove that aQ,h (uh , Ih∗ ũh ) |uh |21,Q holds on the parallelogram.
Let κ = |P1 P4 |/|P1 P2 |. By (4.9), we can derive
aQ,h (uh , Ih∗ ũh ) = α̃A α T = αT A α T ,
where
T =
#
P ⊗D
$
P ⊗D
,
A =
#
|P1 P2 |2 A1
m(Q) κA2
(4.30)
κA2
κ 2 A1
$
with
√
√ ⎤
√
⎡
√ "
√
− 3
18 − 3 36 − 16 3
√
√ ⎥
1 ⎢ √
1 3+2 3 3−2 3
√
√ ⊗
A1 =
32 3
2 3 ⎦,
⎣ 2 3
6 3−2 3 3+2 3
54
√
√
√
− 3
36 − 16 3 18 − 3
$
#
cos θQ A21 A22
A2 =
,
A23 A24
18
√
√
⎤
⎡ √
⎡
⎤
−2 3 − 1 2 3 − 10 3 3 − 4
1
√
√
√
⎥
⎢
⎦,
A21 = ⎣ − 3 − 3
−4 3
− 3 + 3⎦ , R = ⎣ 1
√
√
1
1
2 3−2
3−2
!
A22 = RA21 ,
A23 = A21 R,
A24 = RA21 R.
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Fig. 3. An invertible bilinear mapping FQ : Q̂ → Q.
1356
Let
M. YANG ET AL.
#
|P1 P2 |2 P ⊗ DA1
˜
A =T A =
m(Q) κP ⊗ DA2
!
$
|P1 P2 |2 A˜1
κP ⊗ DA2
=
κ 2 P ⊗ DA1
m(Q) κ A˜2
"
κ A˜2
,
κ 2 A˜1
where m(Q) is the measure of Q. We calculate all the sequential principal minors of the matrices
A˜1 + A˜1T
A˜2 + A˜2T
±
2
2
λmin
A˜ + A˜T
2
λγ
|P1 P2 |2 2λγ
.
m(Q)
σ
(4.31)
Accordingly the following holds for a parallelogram
aQ,h (uh , Ih∗ ũh ) = α
T A + (T A )T T
A˜ + A˜T T 2λγ
α =α
α |uh |21,h,Q .
2
2
σ
Therefore, ah (uh , Ih∗ ũh ) |uh |21 holds for quadrilateral meshes that satisfy Mesh Assumptions A and B.
Lemma 4.6 The matrix
positive definite.
%
A κA
κA T κ 2 A
&
is positive definite if and only if matrices A ± 12 (A + A T ) are
Lemma 4.7 Assume Mesh Assumptions A and B are satisfied. For any uh , vh ∈ Sh , we have
|(uh , Ih∗ ṽh ) − (vh , Ih∗ ũh )| huh 0 vh 0 .
(4.32)
Proof. For any Q ∈ Ωh , a change of variables in multiple integrals gives us
Q
By (4.24), we have
JFQ (0, 0)
Q̂
uh Ih∗ ṽh dx =
Q̂
∗
JFQ ûh I
h ṽh dx̂.
∗
ûh I
h ṽh dx̂ − JFQ (0, 0)
Q̂
∗
v̂h I
h ũh dx̂ = 0.
It was proved in Li & Li (1999) under Mesh Assumptions A and B that
|JFQ − JFQ (0, 0)| h3Q .
(4.33)
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
and find that the principal minors of the above matrices are positive when | cos(θQ )| < 0.97. Hence the
matrices ((A˜1 + A˜1T )/2 ± (A˜2 + A˜2T )/2) are positive definite. By Lemma 4.6, we know that the matrix
(A˜ + A˜T )/2 is also positive definite. Its smallest eigenvalue λγ depends only on the constant γ . From
Mesh Assumption A, we have
1357
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
Combining the above estimates and using (4.28), we obtain
∗
∗
∗
uh I ∗ ṽh dx −
vh Ih ũh dx uh Ih ṽh dx − JFQ (0, 0) ûh Ih ṽh dx̂
h
Q̂
Q
Q
Q
∗
+ vh Ih∗ ũh dx − JFQ (0, 0) v̂h I
ũ
dx̂
h h
Q̂
Q
h3Q uˆh 0,Q̂ v̂h 0,Q̂
hQ uh 0,Q vh 0,Q .
Therefore, by the Cauchy–Schwarz inequality,
∗
uh I ∗ ṽh dx −
v
I
ũ
dx
h h h
h
Q
Q∈Ωh
Q
hQ uh 0,Q vh 0,Q huh 0 vh 0 .
Q∈Ωh
Theorem 4.2 Let u be the solution of (3.8) and uh the numerical solution of the semidiscrete finitevolume scheme (3.9). Assume that u ∈ L∞ (0, T; H 4 ) ∩ H 1 (0, T; H 4 ) and Mesh Assumptions A, B and
C are satisfied. Then
u(t) − uh (t)0 + h|u(t) − uh (t)|1 +
0
t
1/2
|Ih u − uh |21 dt
h3 ,
0 t T.
(4.34)
Proof. We decompose the error as uh − u = ξ − η, where ξ = uh − Rh u and η = u − Rh u. We have the
following error equation:
(ξt , Ih∗ vh ) + ah (ξ , Ih∗ vh ) = (ηt , Ih∗ vh ).
(4.35)
Taking vh = ξt in (4.35) leads to
|ξt |20 = (ηt , Ih∗ ξt ) − ah (ξ , Ih∗ ξt )
ηt 0 Ih∗ ξt 0 + C|ξ |1 |ξt |1
ηt 0 Ih∗ ξt 0 + Ch−1 |ξ |1 ξt 0 ,
where an inverse estimate is used for the last inequality. Utilizing the norm equivalence, we have
ξt 0 ηt 0 + h−1 |ξ |1 .
On the other hand, we take vh = ξ̃ in (4.35) to obtain
1
1d
(ξ , Ih∗ ξ̃ ) + ah (ξ , Ih∗ ξ̃ ) = ((ξ , Ih∗ ξ̃t ) − (ξt , Ih∗ ξ̃ )) + (ηt , Ih∗ ξ̃ ).
2 dt
2
(4.36)
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
|(uh , Ih∗ ṽh ) − (vh , Ih∗ ũh )| 1358
M. YANG ET AL.
By Lemmas 4.5 and 4.7, we have
1d
(ξ , Ih∗ ξ̃ ) + |ξ |21 hξ 0 ξt 0 + ηt 0 Ih∗ ξ̃ 0
2 dt
hξ 0 ξt 0 + ηt 0 ξ 0 .
(4.37)
Combining (4.36) and (4.37) together yields
1d
(ξ , Ih∗ ξ̃ ) + |ξ |21 hξ 0 (ηt 0 + h−1 |ξ |1 ) + ηt 0 ξ 0 .
2 dt
(4.38)
ξ(t)20
+
t
0
|ξ |21
t
dt ((h + 1)ξ 0 ηt 0 + ξ 0 |ξ |1 ) dt
0
t
C
0
ξ 20 dt + C
t
0
ηt 20 dt + 0
t
|ξ |21 dt.
Then taking < 1 and using the Gronwall’s inequality yield
ξ(t)20 +
0
t
|ξ |21 dt By the inverse estimate,
h|ξ |1 ξ 0 0
t
0
t
ηt 20 dt.
(4.39)
1/2
ηt 20
dt
.
(4.40)
From (4.39), (4.40) and Theorem 4.1, we have
u − uh 0 + h|u − uh |1 +
0
t
1/2
|Ih u − uh |21 dt
t
1/2
ξ 0 + u − Rh u0 + h(|ξ |1 + |u − Rh u|1 ) + 2
|ξ |21 + |Ih u − Rh u|21 dt
h3
uL∞ (H 4 ) +
t
0
0
1/2 ut 24 dt
,
which gives the desired result.
Theorem 4.3 Let u be the solution of (3.8) and unh the numerical solution of the fully discrete
finite-volume scheme (3.12). Assume that u ∈ L∞ (0, T; H 4 ) ∩ H 1 (0, T; H 4 ) ∩ H 3 (0, T; L2 ) and Mesh
Assumptions A, B and C are satisfied. Then we have the following error estimate:
M
M
uM − uM
h 0 + h|u − uh |1 +
Δt
M
n=1
1/2
|Ih un,1/2 −
n,1/2
uh |21
h3 + Δt2 ,
0 M N.
(4.41)
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Integrating (4.38) on [0, t], noting that ξ(0) = 0, and using Lemma 4.5, we have
1359
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
Proof. Let ξ = uh − Rh u and η = u − Rh u. It is obvious that ξ 0 = 0. We have the following error
equation:
¯ n , Ih∗ vh ) + ah (ξ n,1/2 , Ih∗ vh ) = (ωn , Ih∗ vh ), n 1,
(∂ξ
(4.42)
where
¯ n + ut
ωn = ∂η
n,1/2
¯ n.
− ∂u
¯ n in (4.42) and take a similar argument as that in Theorem 4.2 to obtain
We choose vh = ∂ξ
¯ n 0 ωn 0 + h−1 |ξ n,1/2 |1 .
∂ξ
(4.43)
(ξ n , Ih∗ ξ̃ n ) − (ξ n−1 , Ih∗ ξ̃ n−1 ) + 2Δtah (ξ n,1/2 , Ih∗ ξ̃ n,1/2 )
= (ξ n−1 , Ih∗ ξ̃ n ) − (ξ n , Ih∗ ξ̃ n−1 ) + 2Δt(ωn , Ih∗ ξ̃ n,1/2 ),
where we use Lemma 4.7 and (4.43) to find
(ξ n−1 , Ih∗ ξ̃ n ) − (ξ n , Ih∗ ξ̃ n−1 ) = (ξ n−1 , Ih∗ (ξ̃ n − ξ̃ n−1 ) − (ξ n − ξ n−1 , Ih∗ ξ̃ n−1 )
¯ n 0 ξ n−1 0 CΔt(hωn 0 + |ξ n,1/2 |1 )ξ n−1 0 .
CΔth∂ξ
Therefore, summing from n = 1 to M yields
(ξ M , Ih∗ ξ̃ M ) + 2Δt
M
ah (ξ n,1/2 , Ih∗ ξ̃ n,1/2 )
n=1
CΔt
M
(hωn 0 + |ξ n,1/2 |1 )ξ n−1 0 + 2Δt
n=1
CΔt
M
M
(ωn , Ih∗ ξ̃ n,1/2 )
n=1
ωn 20 + CΔt
M
n=1
M
ξ n−1 20 + Δt
n=1
|ξ n,1/2 |21 .
n=1
Using Lemma 4.5, taking small enough and applying the discrete Gronwall’s inequality, we have
M
ξ M 20 + Δt
|ξ n,1/2 |21 Δt
n=1
M
ωn 20 .
n=1
The Taylor’s expansion with the remainder term in the integral form gives
Δt
M
n=1
ωn 20 2Δt
M
¯ n 20 + ut
(∂η
n,1/2
n=1
C h
6
0
tM
¯ n 20 )
− ∂u
ut 24
dt + Δt
4
0
tM
uttt 20
dt .
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
On the other hand, we choose vh = 2Δtξ̃ n,1/2 in (4.42) to obtain
1360
M. YANG ET AL.
Hence,
ξ M 20
+ Δt
M
|ξ n,1/2 |21
h
6
n=1
0
tM
ut 24
dt + Δt
4
tM
0
uttt 20 dt.
Finally, the desired result follows by an inverse estimate and a triangle inequality.
5. Numerical experiments
In this section, we present numerical results to illustrate the theoretical findings in this paper.
We test the finite-volume methods for elliptic and parabolic problems on a family of quadrilateral
meshes that are obtained by perturbing a set of rectangular meshes randomly. The rectangular meshes
have M = 8, 16, 32, 64, 128 partitions, respectively, in both x, y-directions. The quadrilateral meshes are
then generated by
xi,j =
π
π
i+
sin(j) rand(),
M
4M
yi,j =
π
π
j+
sin(i) rand(),
M
4M
1 i, j M − 1,
where sin(i), sin(j) use the radian unit for angles and rand() generates a random number in (0, 1).
The preconditioned bi-conjugate gradient stabilized method (BiCGStab) is employed to solve the
nonsymmetric discrete linear systems. The tolerance for residuals is set as 10−12 and the simple diagonal preconditioning is used. The numerical order of convergence is then measured by comparing the
computed errors on two successive mesh levels.
Example 1 (An Elliptic Problem) The domain is Ω = [0, π ]2 , the permeability coefficient a(x, y) =
(x + 1)2 + y2 , the exact solution u(x, y) = sin(x) sin(y). This problem was tested in Yang (2006).
Table 1 shows a third-order convergence in L2 -norm of the error u − uh and also a third-order convergence in the H 1 -seminorm of h(u − uh ). One can also observe a third-order superapproximation in
|Ih u − uh |1,h , which is equivalent to |Ih u − uh |1 by Lemma 4.1.
For comparison, Table 2 tabulates numerical results for the elliptic problem in Example 1 by using
the finite-volume scheme based on the Simpson quadrature points. One can observe only a second-order
convergence in |Ih u − uh |1,h .
Example 2 (A Parabolic Problem) The domain is Ω = [0, π ]2 , the permeability coefficient a(x, y) =
(x + 1)2 + y2 , the exact solution u(x, y, t) = e−0.1t sin(x) sin(y) and the final time T = 0.2. The right-hand
side f (x, y, t) is computed accordingly. This example was tested in Yang & Liu (2011).
In Table 3, we present numerical results obtained from using the Crank–Nicholson scheme for
temporal discretization. We take a fixed but relatively small time step Δt = T/256 so that the spatial errors dominate. One can observe third-order convergence in h for max0nN un − unh 0 and
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Remark 4.2 Note from Theorems 4.1–4.3 that our error estimates are optimal with respect to the degree
of approximating polynomials used, but suboptimal with respect to the solution regularity. There are two
main reasons. First, to obtain optimal order errors, finite-volume element methods almost need higher
regularity assumptions on the exact solution than the finite element methods (even for linear cases),
see, e.g., Chou & Ye (2007), Xu & Zou (2009) and Yang (2006). Secondly. the analysis is based on the
superapproximation result for ah (u − Ih u, Ih∗ vh ), which convergences one order higher than the optimal
rate. The errors in the H 1 - and L2 -norms can be regarded as a by-product of this superconvergence result.
This technique successfully avoids the difficulty of the duality argument for higher order finite-volume
methods but needs higher regularity on the exact solution.
1361
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
Table 1 Example 1: Numerical errors and convergence rates for the finite-volume scheme
using Barlow points for the elliptic problem on quadrilateral meshes with h = π/M
M
8
16
32
64
128
u − uh 0
4.942E−4
5.231E−5
6.173E−6
7.595E−7
9.456E−8
|u − uh |1
7.704E−3
1.691E−3
4.051E−4
1.001E−4
2.495E−5
Rate
—
3.23
3.08
3.02
3.00
|Ih u − uh |1,h
1.275E−3
7.223E−5
5.691E−6
5.948E−7
7.073E−8
Rate
—
2.18
2.06
2.01
2.00
Rate
—
4.14
3.66
3.25
3.07
M
8
16
32
64
128
u − uh 0
2.119E−3
4.537E−4
1.077E−4
2.650E−5
6.592E−6
|u − uh |1
8.272E−3
1.810E−3
4.329E−4
1.069E−4
2.664E−5
Rate
—
2.22
2.07
2.02
2.00
|Ih u − uh |1,h
7.785E−3
1.618E−4
3.765E−4
9.203E−5
2.285E−5
Rate
—
2.19
2.06
2.01
2.00
Rate
—
2.26
2.10
2.03
2.00
Table 3 Example 2: Numerical errors and convergence rates for the parabolic problem
on quadrilateral meshes using the Crank–Nicholson scheme and Barlow points with fixed
Δt = T/256 and varying h = π/M
M
8
16
32
64
128
max0nN un − unh 0
4.999E−4
5.239E−5
6.175E−6
7.595E−7
1.010E−7
Rate
—
3.25
3.08
3.02
2.91
max0nN |un − unh |1
7.714E−3
1.691E−3
4.051E−4
1.001E−4
2.495E−4
Rate
—
2.18
2.06
2.01
2.00
|Ih u − uh |E
5.525E−4
3.165E−5
2.531E−6
2.718E−7
4.853E−8
Rate
—
4.12
3.64
3.21
2.48
max0nN h|un − unh |1 , as proved in Theorem 4.3. For M = 128, the L2 and energy error convergence
rates drop a bit. This is because the dominance of the spatial errors becomes weaker as M increases.
In Table 4, we present numerical results obtained from using the third-order backward differentiation
formula (BDF3) (Iserles, 1996) for temporal discretization. It is reflected in Table 4 that
M
M
3
3
uM − uM
h 0 + h|u − uh |1 h + Δt ,
0 M N,
when Δt = O(h).
In Tables 3 and 4, we consider also a discrete temporal energy norm
|Ih u − uh |E := Δt
N
n=1
1/2
|Ih un − unh |21,h
.
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Table 2 Example 1: Numerical errors and convergence rates for the finite-volume scheme
using Simpson points for the elliptic problem on quadrilateral meshes with h = π/M
1362
M. YANG ET AL.
Table 4 Example 2: Numerical errors and convergence rates for the parabolic problem
on quadrilateral meshes using the BDF3 scheme and Barlow points with h = π/M , Δt =
(0.1/π )h, N = 2M
M
8
16
32
64
128
max0nN un − unh 0
4.957E−4
5.232E−5
6.171E−6
7.594E−7
9.458E−8
Rate
—
3.24
3.08
3.02
3.00
max0nN |un − unh |1
7.694E−3
1.689E−3
4.050E−4
1.001E−4
2.495E−5
Rate
—
2.18
2.06
2.01
2.00
|Ih u − uh |E
5.521E−4
3.156E−5
2.506E−6
2.640E−7
3.256E−8
Rate
—
4.12
3.65
3.24
3.01
6. Concluding remarks
The usefulness of quadrilateral meshes for developing numerical methods for partial differential equations has been demonstrated in Arnold et al. (2002), Flemisch & Wohlmuth (2007), Li & Li (1999) and
Schroll & Svensson (2006). Shape parameters for characterizing quality of quadrilateral meshes were
discussed in Chou & He (2002) and Yang & Liu (2011). Mesh Assumption A and B are used for obtaining optimal error estimates, whereas Mesh Assumption C is used for deriving the superconvergence.
The new finite-volume schemes developed in this paper have optimal convergence rates, thanks to
the Barlow points. Barlow points were originally discovered as optimal stress sampling points in finite
bar elements (Barlow, 1976). It was then realized that Barlow points are the same as Gaussian points for
linear and quadratic bar elements, but different for cubic bar elements (Júnior, 2008). The discrepancy
has motivated alternative approaches, e.g., the variational approach, the best-fit method that leads to
discovery of Prathap points and establishment of the relationships among Barlow points, Gaussian
points and Prathap points for one-dimensional finite elements (Rajendran, 2009). Barlow points can be
established for rectangular elements through tensor products and for quadrilateral elements via bilinear
transformations. However, the study in Rajendran & Liew (2003) implies that the effectiveness of
Barlow points, Gaussian points, and Prathap points for linear and quadratic finite (volume) elements
on triangular meshes seems limited. On the other hand, construction of higher order Lagrange and
Hermite-type finite-volume element methods on triangular elements are investigated in Chen et al.
(2011) in a general framework. Development of higher order finite-volume methods remains an active
and promising research front.
Funding
The first author is supported by Shandong Province Higher Educational Science and Technology Program (J10LA01), Shandong Province Natural Science Foundation (ZR2010AQ020) and National Natural Science Foundation of China (11201405). The third author is partially supported by GRF grant of
Hong Kong (No. PolyU 501709), JRI of PolyU and NSERC (Canada).
References
Arnold, D., Boffi, D. & Falk, R. (2002) Approximation by quadrilateral finite elements. Math. Comput., 71,
909–922.
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Table 3 uses Crank–Nicholson for temporal discretization, whereas Table 4 uses BDF3. One can clearly
observe better convergence rates in the energy norm from using the Barlow points than those from using
Simpson points (see Yang & Liu, 2011, Table 2).
OPTIMAL ORDER ERRORS FOR QUADRATIC FVEMS
1363
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014
Barlow, J. (1976) Optimal stress locations in finite element models. Int. J. Numer. Methods Eng., 10, 243–251.
Brenner, S. C. & Scott, L. R. (2008) The Mathematical Theory of Finite Element Methods, 3rd edn. New York:
Springer.
Cai, Z., Douglas Jr, J., & Park, M. (2003) Development and analysis of higher order finite volume methods over
rectangles for elliptic equations. Adv. Comput. Math., 19, 3–33.
Chen, L. (2010) A new class of high order finite volume methods for second order elliptic equations. SIAM
J. Numer. Anal., 47, 4021–4043.
Chen, Z., Wu, J. & Xu, Y. (2011) Higher-order finite volume methods for elliptic boundary value problems. Adv.
Comput. Math., doi:10.1007/s10444-011-9201-8.
Chou, S. H. & He, S. (2002) On the regularity and uniformness conditions on quadrilateral grids. Comput. Meth.
Appl. Mech. Engrg., 191, 5149–5158.
Chou, S. H. & Ye, X. (2007) Unified analysis of finite volume methods for second order elliptic problems. SIAM
J. Numer. Anal., 45, 1639–1653.
Ewing, R. E., Liu, M. & Wang, J. (1999) Superconvergence of mixed finite element approximations over quadrilaterals. SIAM J. Numer. Anal., 36, 772–787.
Flemisch, B. & Wohlmuth, B. (2007) Stable Lagrange multipliers for quadrilateral meshes of curved interfaces
in 3D. Comput. Meth. Appl. Mech. Engrg., 196, 1589–1602.
Gao, G. & Wang, T. (2010) Cubic superconvergent finite volume element method for one-dimensional elliptic and
parabolic equations. J. Comput. Appl. Math., 2010, 2285–2301.
Hackbusch, W. (1989) On first and second order box schemes. Computing, 41, 277–296.
Hyman, J. M., Knapp, R. & Scovel, J. C. (1992) High order finite volume approximations of differential operators
on nonuniform grids. Physica D, 60, 112–138.
Iserles, A. (1996) A First Course in the Numerical Analysis of Differential Equations. Cambridge: Cambridge
University Press.
Júnior, D. S. P. (2008) Studies on Barlow points, Gauss points and superconvergent points in 1D with Lagrangian
and Hermitian finite element basis. Comput. Appl. Math., 27, 275–303.
Li, R., Chen, Z. & Wu, W. (2000) Generalized Difference Methods for Differential Equations: Numerical Analysis
of Finite Volume Methods. New York: Marcel Dekker.
Li, Y. & Li, R. (1999) Generalized difference methods on arbitrary quadrilateral networks. J. Comput. Math., 17,
653–672.
Liebau, F. (1996) The finite volume element method with quadratic basis functions. Computing, 57, 281–299.
Plexousakis, M. & Zouraris, G. E. (2004) On the construction and analysis of high order locally conservative
finite volume-type methods for one-dimensional elliptic problems. SIAM J. Numer. Anal., 42, 1226–1260.
Rajendran, S. (2009) Optimal stress recovery points for higher-order bar elements by the Prathap’s best-fit
method. Comm. Numer. Meth. Engrg., 25, 864–881.
Rajendran, S. & Liew, K. M. (2003) Optimal stress sampling points of plane triangular elements for patch recovery of nodal stresses. Int. J. Numer. Meth. Engrg., 58, 579–607.
Schroll, H. J. & Svensson, F. (2006) A bi-hyperbolic finite volume method on quadrilateral meshes. J. Sci.
Comput., 26, 237–260.
Thomée, V. (2006) Galerkin Finite Element Methods for Parabolic Problems. Berlin: Springer.
Wang, T. & Gu, Y. (2010) Superconvergent biquadratic finite volume element method for two-dimensional Poisson’s equations. J. Comput. Appl. Math., 234, 447–460.
Xu, J. C. & Zou, Q. (2009) Analysis of linear and quadratic simplicial finite volume methods for elliptic equations.
Numer. Math., 111, 469–492.
Yang, M. (2006) A second-order finite volume element method on quadrilateral meshes for elliptic equations.
ESAIM Math. Model. Numer. Anal., 40, 1053–1068.
Yang, M. & Liu, J. (2011) A quadratic finite volume element method for parabolic problems on quadrilateral
meshes. IMA J. Numer. Anal., 31, 1038–1061.
Yang, M., Liu, J. & Chen, C. (2009) Error estimation of a quadratic finite volume method on right quadrangular
prism grids. J. Comput. Appl. Math., 229, 274–282.
1364
M. YANG ET AL.
Yu, C. & Li, Y. (2010) Biquadratic element finite volume method based on optimal stress points for solving Poisson
equations. Math. Numer. Sin., 32, 59–74 (in Chinese).
Yu, C. & Li, Y. (2011) Biquadratic finite volume element methods based on optimal stress points for parabolic
problems. J. Comput. Appl. Math., 236, 1065–1068.
Zlámal, M. (1978) Superconvergence and reduced integration in the finite element method. Math. Comp., 143,
663–685.
Downloaded from http://imajna.oxfordjournals.org/ at U Colorado Library on July 25, 2014