Change-point detection in vector time series using tree algorithms and smoothers He Zhang
advertisement

Master Thesis in Statistics, Data Analysis and Knowledge
Discovery
Change-point detection in vector
time series using tree algorithms
and smoothers
He Zhang
The back cover shall contain the ISRN number obtained from the department. This
number shall be centered and at the same distance from the top as the last line on the
front page.
LiU-IDA-???-SE
Datum
Date
2009-08-22
Avdelning, Institution
Division, Department
Department of Computer and Information Science
Svenska/Swedish
Examensarbete
ISBN
___________________________________________________
__
ISRN
Engelska/English
C-uppsats
_________________________________________________________________
D-uppsats
Serietitel och serienummer
Övrig rapport
Title of series, numbering
Språk
Rapporttyp
Language
Report category
Licentiatavhandling
ISSN
____________________________________
URL för elektronisk version
http://www.ep.liu.se
Titel
Title
Change-point detection in vector time series using tree algorithms and smoothers
Författare
Author
He Zhang
Sammanfattning
Abstract
Detection of abrupt level shifts in observational data is of great interest in climate research, bioinformatics, surveillance of manufacturing
processes, and many other areas. The most widely used techniques are based on models in which the mean is stepwise constant. Here, we
consider detection of more or less synchronous level shifts in vector time series of data that also exhibit smooth trends. The method we propose
is based on a back-fitting algorithm that alternates between estimation of smooth trends for a given set of change-points and estimation of
change-points for given smooth trends. More specifically, we combine an existing non-parametric smoothing technique with a new two-step
technique for change-point detection. First, we use a tree algorithm to grow a large decision tree in which the space of vector coordinates and
time points is partitioned into rectangles where the response (adjusted for smooth trends) has a constant mean. Thereafter, we reduce the
complexity of the tree model by merging adjacent pairs of rectangles until further merging would cause a significant increase in the residual sum
of squares. Our algorithm was tested on synthetic vector time series of data with promising results. An application to a vector time series of
water quality data showed that such data can be decomposed into smooth trends, abrupt level shifts and noise. Further work should focus on
stopping rules for reducing the complexity of the tree model.
Nyckelord
Keyword
Change-point detection, regression trees, nonparametric smoothing
Abstract
Detection of abrupt level shifts in observational data is of great interest in
climate research, bioinformatics, surveillance of manufacturing processes, and
many other areas. The most widely used techniques are based on models in
which the mean is stepwise constant. Here, we consider detection of more or
less synchronous level shifts in vector time series of data that also exhibit
smooth trends. The method we propose is based on a back-fitting algorithm
that alternates between estimation of smooth trends for a given set of
change-points and estimation of change-points for given smooth trends. More
specifically, we combine an existing non-parametric smoothing technique with
a new two-step technique for change-point detection. First, we use a tree
algorithm to grow a large decision tree in which the space of vector coordinates
and time points is partitioned into rectangles where the response (adjusted for
smooth trends) has a constant mean. Thereafter, we reduce the complexity of
the tree model by merging adjacent pairs of rectangles until further merging
would cause a significant increase in the residual sum of squares. Our
algorithm was tested on synthetic vector time series of data with promising
results. An application to a vector time series of water quality data showed that
such data can be decomposed into smooth trends, abrupt level shifts and noise.
Further work should focus on stopping rules for reducing the complexity of the
tree model.
Keywords: change-point detection, regression trees, nonparametric smoothing
I
II
Acknowledgements
I would like to express my deep gratitude to my supervisor Prof. Anders
Grimvall who introduced a very interesting and powerful research topic. He
spent a lot of time on helping me develop the ideas and improve this thesis both
in contents and language.
I would like to thank Ph.D student Sackmone Sirisack for his kind suggestion
and discussion on the thesis.
I also would like to thank my parents Ailing Zheng and Decheng Zhang and my
good friend Johan Hemström dearly for their support and encouragement.
III
IV
Table of contents
1
1.1
1.2
2
2.1
Introduction ...................................................................................................... 2
Background ...................................................................................................... 2
Objective .......................................................................................................... 3
Methods............................................................................................................ 4
Detection of change-points ............................................................................... 4
2.1.1Parameter estimation ............................................................................................... 5
2.1.2 Model selection........................................................................................................ 6
2.1.3 A generalized tree algorithm .................................................................................... 8
3
4
5
6
7
8
2.2 Smoothing of vector time series of data .............................................................. 8
2.3 A general back-fitting algorithm .......................................................................... 9
Mean shift model and datasets ....................................................................... 10
3.1 Computer-generated data ................................................................................... 11
3.2 Observational data ............................................................................................. 11
Test beds for the proposed algorithms ........................................................... 12
4.1 Runs involving surrogate data ........................................................................... 12
4.2 Runs involving real data ................................................................................ 13
Results ............................................................................................................ 14
5.1 Analysis of surrogate data .............................................................................. 14
5.1 Analysis of observational water quality data ................................................. 20
Discussion and conclusions ........................................................................... 21
Literature ........................................................................................................ 23
Appendix ........................................................................................................ 25
1
1 Introduction
1.1 Background
Change-point analysis aims to detect and estimate abrupt level shifts and other
sudden changes in the statistical properties of sequences of observed data. This
form of statistical analysis has a great variety of applications, such as quality
control
of
manufactured
items,
early
detection
of
epidemics,
and
homogenization of environmental quality data. In some cases, the
change-points represent real changes in the systems under consideration. In
other cases, abrupt changes in the collected data may be due to systematic
measurement errors.
Control charts are considered to be the oldest statistical instruments for
change-point detection. The basic ideas of such charts were outlined by
Shewhart (1924) who was a pioneer in statistical quality control for industrial
manufacturing processes. Other authors have contributed to a solid theory for
retrospective analyses of changes in the mean of a probability distribution.
Hawkins (1977) proposed a test for a single shift in location of a sequence of
normally distributed random variables, and Srivastava & Worsley (1986)
proposed a test for a single change in the mean of multivariate normal data.
Shifts in the mean were also examined by Alexandersson (1986) who proposed
the so-called standard normal homogeneity test (SNHT) for detecting artificial
level shifts in meteorological time series when a reliable reference series is
available. Fitting multiple change-point models to observational data is a
computationally demanding problem that requires algorithms in which a global
optimization is separated into simpler optimization tasks (Hawkins, 2001). This
is particularly true when the number of change-points is unknown (Caussinus
& Mestre, 2004; Picard et al., 2005). A fast Bayesian change-point analysis was
recently published by Erdman & Emerson (2008).
2
The cited methods are based on the assumption that the mean is stepwise
constant or that this condition is fulfilled after removing a common trend
component in all the investigated series. Here, we consider the problem of
detecting change-points in the presence of smooth trends that may be different
for different vector components. Recently, it was shown how a synchronous
level shift in all vector components can be estimated in the presence of trends
that vary smoothly across series (Wahlin et al., 2008). In this thesis we consider
change-points that are not necessarily synchronous.
1.2 Objective
The general objective of this thesis is to develop an algorithm that enables
detection of an unknown number of level shifts in vector time series of data
that also exhibit smooth trends. In particular, we shall investigate how
change-point detection involving regression trees can be combined with a
nonparametric smoothing technique (Grimvall et al., 2008) into a back-fitting
algorithm.
The specific objectives are as follows:
•
Implement a tree algorithm for splitting the space of vector coordinates and
time points into a set of rectangular subsets (regions).
•
Reduce the complexity of the derived tree model by successively merging
regions until further merging would lead to a significant increase in the residual
sum of squares.
•
Integrate the tree algorithm with an existing nonparametric smoothing
technique (MULTITREND) into an algorithm for decomposing the variation of
the given data into smooth trends, abrupt level shifts and noise.
•
Test the tree method and the integrated algorithm on synthetic data and real
data.
3
2 Methods
2.1 Detection of change-points
Decision trees provide simple and useful structures for decision processes and
for estimation of piecewise constant functions in nonlinear regression. A
widely used algorithm that we shall refer to as the tree algorithm was
developed by Breiman et al. (1984). It assumes that the mean response is a
function of p predictors or inputs and that the input domain can be split into
cuboids where the mean is constant. We shall consider tree algorithms for
segmentation of vector time series of data. The mean response is assumed to be
piecewise constant with an arbitrary number of level shifts. Some of these level
shifts may be synchronous for two or more series, whereas others only affect
the mean of a single series.
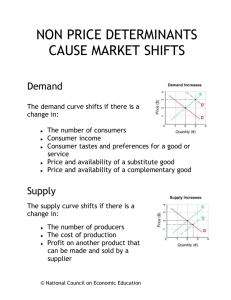
Figure 1 Arbitrary partitions and CART (Hastie et al, 2001)
4
Figure 1 compares arbitrary partition and CART splitting where the latter
partitions the dataset by building a tree structure or segmenting the feature
space into a set of rectangles. More specifically, the top left panel shows a
general partition that is obtained from an arbitrary (not recursively binary)
splitting; while the top right panel illustrates a partition of a two-dimensional
feature space by recursively binary splitting, as used in CART. The bottom left
panel shows the corresponding tree structure, and a perspective plot of the
prediction surface appears in the last panel (Hastie et al., 2001). We shall use a
tree algorithm to partition the two-dimensional space of time points and vector
coordinates.
2.1.1 Parameter estimation
Here, we describe a general tree algorithm outlined by Breiman and co-workers
(1984) and Hastie and co-workers (2001). Furthermore, we explain how this
algorithm can be simplified when we are estimating a function that is piecewise
constant in two ordinal-scale inputs.
Consider the dataset ( xi , yi ) for i 1, 2, , N , with xi
( xi1 , xi 2 ,
, xip )
comprising N observations with p independent variables (inputs) and one
response. The cited algorithm then recursively identifies splitting variables and
split points so that the input space is partitioned into cuboids (or regions)
R1 , R2 ,
, RM in which the response is modeled as a constant cm .
f ( x)
M
c I (x
m 1 m
Rm )
When searching for the first two regions, we let
R1 ( j , s) { X X j
s} and R2 ( j , s) { X X j
s}
and determine the splitting variable j and split point s that solve
min[min
j ,s
c1
xi R1 ( j , s )
( yi c1 ) 2
min
c2
xi R2 ( j , s )
( yi c2 ) 2
This procedure is then repeated on each of the derived regions until a large tree
5
model has been constructed.
Because the sum of squares
( yi
f ( xi ))2 is employed as measure of the
goodness-of-fit, the best estimator of the mean cm of yi in region Rm is equal to
the average observed response.
cm
ave( yi xi
Rm )
In our case, we have a choice between splitting with respect to time (j=1) or
vector coordinates (j=2) of the observed time series in each step. The number
of combinations of j and s that shall be investigated is thus equal to the sum of
the number of time points and the number of time series in the region under
consideration. Furthermore, it is sufficient to use information about the number
of observations and their sum in arbitrary rectangles of the input space. This
makes the tree algorithm a very fast algorithm with complexity O(N).
2.1.2 Model selection
Breiman’s procedure for selecting a suitable tree model involves two basic
steps. First, a large tree is built to ensure that the input domain is split into
regions that are pure in the sense that the response exhibits little variation. Then,
regions are merged by pruning branches of the decision tree.
Generally, the target of the tree algorithms is to achieve the best partition with
minimum costs. In other words, the split at each node should generate the
greatest improvement in decision accuracy. This is usually measured by the
node impurity (sum of squared residuals) which provides an indication of the
relative homogeneity of all the cases within one region. Furthermore, another
criterion must be established to determine when to stop the splitting and
pruning processes.
6
The tree size is determined by considering the trade-off between the derived
number of regions (node size or model complexity) and the goodness-of-fit to
the given data. A huge tree may lead to over-fit the given data and increased
variance of model predictions. A small tree might not capture important
features of the underlying model structure and produce biased predictions. One
approach to the model selection problem is to perform a significance test for
each suggested split. However, this strategy is short-sighted since a seemingly
worthless split might lead to a very good split after other splits have been
undertaken. Therefore, it is often recommended to first grow a large tree and
then reduce the model complexity by pruning. Because the size of the large tree
is not very crucial, one can simply set a threshold for the node size (the number
of observations in a node) in each terminal region (Hastie et al., 2001).
The final pruning requires a more elaborated assessment of the tradeoff
between model complexity (no. of terminal nodes) and goodness-of-fit (sum of
squared errors). Hastie and co-workers (2001) suggest a cost complexity
criterion which is composed of the total cost (total sum of squared errors) and a
penalty quantity indicating the complexity of the derived tree in terms of
number of terminal nodes. The expression is
M
RSS m
M , where RSSm
( yi
cm ) 2
xi Rm
m 1
Adaptively choosing the penalty factor
is the main difficulty in using the
cited procedure to prune a tree into the right size. Alternative model selection
procedures may be based on information criteria such as Akaike’s Information
Criterion (AIC), Bayesian Information Criterion (BIC) or minimum description
length.
7
2.1.3 A generalized tree algorithm
We have previously noted that tree algorithms generate partitions of the input
domain into cuboids or rectangles. To be able to fit more complex structures to
a set of collected data we consider models in which the mean is constant in
regions that are formed as unions of rectangles. First, a tree algorithm is used to
create a set of relatively small rectangular regions, and then adjacent regions
are step by step merged until there is a significant increase in the segmentation
cost.
We tried to control the merging of regions using two different procedures: (i) a
standard partial F-test; (ii) block cross-validation. The F-test compares the
residual sum of squared errors before and after the merging. Block
cross-validation splits the data sets into training and test sets, fits models to the
training sets, and evaluates the predictive power of the fitted models on the test
sets.
2.2 Smoothing of vector time series of data
When vector time series of data are analyzed, it is often appropriate to assume
that the expected response is a smooth function of both time and vector
coordinate. For example, this is a natural assumption when the analyzed dataset
represents environmental quality at sampling sites located along a transection
or along an elevation gradient. It may also be appropriate for data representing
measured concentrations of chemical compounds that can be ordered linearly
with respect to volatility or polarity.
So-called gradient smoothing (Grimvall et al., 2008) refers to fitting smooth
response surfaces to a vector time series of data by minimizing the sum
8
S( , , )
L( )
1 1
n
2
L2 ( ) , where
( yt( j )
( j)
t
i 1 j 1
(
( j)
t
(
( j)
t
( j)
t 1
t 2 j 1
n m 1
L2 ( )
2
are roughness penalty factors;
( j)
t
( xit( j ) xi( j ) ))2 is the residual sum of squares;
i 1
n 1 m
L1 ( )
and
p
m
S( , , )
1
( j)
t 1 2
) represents roughness over time;
2
( j 1)
t
( j 1)
2
t
2
t 1 j 2
) represents roughness across coordinates.
Minor modifications of this smoothing method can make it appropriate also for
seasonal or circular data.
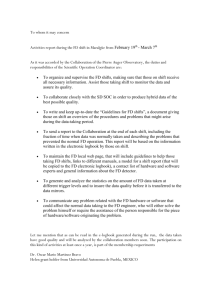
Figure 2 Gradient smoothing for data collected at different sites along a
gradient
2.3 A general back-fitting algorithm
The following pseudo code given by Wahlin et al. (2008) illustrates the back
fitting algorithm for joint estimation of smooth trends and discontinuities (level
shifts).
1) Initialize
2) Initialize
0
by using a multiple linear regression model with intercept to
regress y on x1,
, xp
3) Initialize press =0
4) Initialize s =1
5) Repeat
9
6) T = {1, …, s-1, s+1, …, n}
Cycle
p
ut( j )
yt( j )
( j)
k
( xkt( j )
xk( j ) )
( j)
k
k 1
m
(ut( j )
arg min[
( j) 2
t
)
L (W1 , )
1 1
2
L2 (W2 , )]
t T j 1
ut( j )
yt( j )
( j)
t
( j)
t
, t T , j 1,
,m
p
m
(ut( j )
arg min[
( j)
k
0
t T j 1
( xkt( j )
xk( j ) )) 2 ]
k 1
p
ut( j )
yt( j )
( j)
t
( j)
k
( xkt( j )
xk( j ) ), t T , j 1,
,m
k 1
m
(ut( j )
arg min[
( j) 2
t
) ]
t T j 1
m
( j)
t
( j)
t
( j)
t
mean(
)
t T j=1
until the relative change in the penalized sum of squares on T is below a
predefined threshold
p
m
press
( ys( j )
press
( j)
s
j 1
s
( j)
k
( xks( j )
xk( j ) )
( j) 2
s
)
k 1
s 1
7) Until s=n
Here,
represents the smooth trend,
abrupt level shifts and
the impact of
covariates.
3 Mean shift model and datasets
A univariate mean shift model can be written
t
yt
t
S t
t
.
t 1,
, n , where S t
i
i
is a level shift at time t and yt is the observed response at time t. S(t) is thus
10
the cumulated level shifts from time 1 to t. If there is no level shift at time i,
t
is zero. Error terms are assumed to be independent and normally distributed
with zero mean and constant standard deviation. Multivariate mean shift
models can be defined analogously, and the level shifts can be more or less
synchronous.
3.1 Computer-generated data
A set of surrogate data representing mean monthly temperatures recorded
during the period 1913-1999 was downloaded from www.homogenisation.org. This
data is part of a larger benchmark dataset for assessing the ability of statistical
methods to detect artificial level shifts in climate data with realistic marginal
distributions, temporal and spatial correlations. More information about the
surrogate data set can be found in the following link:
ftp://ftp.meteo.uni-bonn.de/pub/victor/costhome/monthly_benchmark/inho/
3.2 Observational data
Water quality data representing the concentrations of total phosphorus at three
different depths (0.5, 10 and 20m) at Dagskärsgrund in Lake Vänern (Sweden),
1991-2005, were downloaded from the Swedish University of Agricultural
Science. The mean value of the observed concentrations for each combination
of year and depth were then used as inputs to our change-point detection
algorithm.
11
4 Test beds for the proposed algorithms
4.1 Runs involving surrogate data
Data with a negligible trend slope, such as our surrogate temperature data, can
be analyzed using models with piecewise constant means. Accordingly, we
applied our tree algorithm directly to that dataset. The input domain was step
by step subjected to binary splits using the combination of splitting variable
and splitting point that produced the most significant “gain”, i.e. the strongest
reduction in total residual sum of squares (RSS). Furthermore, region features,
such as size (the number of observations in each derived region), mean, and
RSS were updated after each split. As the number of regions increases, the total
RSS may first decrease sharply and then level out as the “gain” decreases. To
assess the statistical significance of the observed gain, we computed the
following F-statistic at each step:
F
RSS1 RSS 2 RSS 2
/
p2 p1
n p2
Here, RSS1 denotes the residual sum of squares before splitting, whereas RSS2
is the residual sum of squares after splitting. Furthermore, n represents the
number of observations, while the degrees of freedom of the two sums are n-p1
and n-p2, respectively. The split under consideration was accepted when the
F-statistic exceeded 2.71, which corresponds to a significance level of
approximately 0.1 when p2 - p1 = 1 and n is large. When no splitting was
statistically significant the growth of the decision tree was terminated.
To reduce the risk of over-fitting, pairs of adjacent regions were then merged
until the F-statistic
F
RSS1 RSS 2 RSS 2
/
p2 p1
n p2
was above a predefined level for all adjacent pairs of regions. Different
12
significance levels were examined. However, in general, we used a lower
significance level when regions were merged. The final result of the entire
process is a partition of the input domain into regions that are now unions of
rectangles.
Cross-validation was used as an alternative method to determine how many
pairs of regions should be joined. More specifically, we used K-fold
cross-validation. This means that the original sample is partitioned into K
subsamples and that K pairs of training and test sets are formed by letting one
of the subsamples be the test set while all other data constitute the training set.
The prediction error sum of squares (PRESS) was computed for all test sets,
and the total PRESS-value was then used to examine how long regions could
be joined without reducing the predictive power of the model.
4.2
Runs involving real data
Datasets that have a smooth trend can be analyzed for change-points using a
back-fitting algorithm that alternates between estimation of change-points for a
given smooth trend and estimation of smooth trends for a given set of
change-points. We used the previously described water quality data from Lake
Vänern for our test runs. Initial estimates of one smooth and one discontinuous
component were obtained by employing the decomposition method developed
by Wahlin and co-workers (2008). Thereafter, the decomposition was step by
step improved using our back-fitting algorithm where the level shifts are not
necessarily synchronous. More specifically, our tree algorithm was used to
estimate change-points for given trends, whereas the software MULTITREND
(Grimvall et al., 2008) was used to estimate smooth trends for a given set of
change-points. A noise component was extracted by subtracting the smooth
trends and the level shifts from observed data.
13
5 Results
5.1 Analysis of surrogate data
Station1
20
Station2
Temperature
15
Station3
Station4
10
Station5
Station6
5
Station7
0
1900
-5
Station8
1920
1940
1960
1980
2000
Station9
Station10
-10
Station11
Year
Station12
Figure 3. Surrogate monthly temperature data for 12 stations in 1913-1999.
Station 1
20
Station 2
Cell mean of temperature
15
Station 3
Station 4
10
Station 5
Station 6
5
Station 7
Station 8
0
1900
-5
1920
1940
1960
1980
2000
Station 9
Station 10
Station 11
-10
Year
Station 12
Figure 4. Estimated region means after using our tree algorithm to split the
input domain into rectangles.
The analyzed surrogate data are illustrated in Figure 3. Visual inspection
strongly indicates that there is a major level shift around 1960 and possibly two
other significant level shifts. When our tree algorithm was applied to the data
14
shown in Figure 3, the input domain was partitioned into 126 rectangles
defining a total of 131 change-points.
Figure 4 shows the region mean for each cell, i.e each combination of year and
month. It can be seen that each monthly series has several level shifts. In
addition, the tree algorithm has identified several outliers that are shown as
segments with a single observation.
Table 1 in the appendix reveals the results of implementing cross-validation
model selection method and compares the derived total predicted residual sum
of squares (PRESS) between ten-fold and leave one out cross-validation
methods at different significance levels. The two cross-validation methods are
implemented by using one year of observations as a unit. For instance, leave
one out cross-validation leaves out the observations in one year each time.
Analogously, ten-fold cross-validation divides the whole data set into 10
subsamples, and each subsample is used as a test data set once to measure the
predicted residual sum of squares while the remaining nine subsamples are
employed as training data. In both cases, predicted values are computed as the
mean value in the associated region. A model is then selected by choosing the
alpha level with the smallest PRESS in each method. In our test runs, we
obtained
=0.5 using ten-fold CV while
=0.01 was obtained with the
leave-one-out method. A significance level of 0.5 did not entail a large
reduction in the number of terminal regions (from 126 to 109), whereas
merging the number of regions decreased to only 44 when
was 0.01.
Figure 5 and 6 compare the results of the two cross-validation methods in terms
of the derived PRESS when different significance levels were used. Both
graphs have a minimal PRESS that was used to select the significance level in
the merging step.
15
3300
3200
3100
PRESS
3000
2900
2800
2700
2600
2500
0
0,2
0,4
0,6
0,8
1
alpha level
Figure 5. Total sum of squared prediction errors using ten-fold cross-validation
to select the prediction model
3820
3800
3780
PRESS
3760
3740
3720
3700
3680
3660
3640
0,000001
0,00001
0,0001
0,001
0,01
0,1
1
alpha level
Figure 6. Total sum of squared prediction errors obtained by leaving out one
year of observations at a time.
Next step of the algorithm is to remove the superfluous segmentations, and
figure 7 displays the region mean for each observational cell after merging the
adjacent regions. Compared with the previous region means graph, there are
less short lines or single dots after merging procedure, and hence the data
before or after a change-point becomes more unified in one series. In more
detail, the merging procedure was based on the derived 126 rectangles, and
each time the merging of all possible adjacent pairs of regions were evaluated
16
using an F test statistic that measured if the difference in mean between the two
regions was small enough. Furthermore, the corresponding p-value of each test
statistic was calculated and used as a criterion for selecting which pair to join.
The algorithm always joins the pair with the largest p-value and stops when
this value is less than or equal to a given threshold. For the synthetic data set,
0.01 is chosen as a significance level to stop merging regions.
Station 1
14
Station 2
Station 3
Cell mean of temperature
9
Station 4
Station 5
Station 6
4
Station 7
Station 8
-1
1900
Station 9
1920
1940
1960
1980
2000
Station 10
Station 11
-6
Year
Station 12
Figure 7. Region means after merging regions not significantly different at level
0.01.
The sum of squared residuals (RSS) of all the regions are calculated and
recorded in each step of our CART splitting and region merging procedure
respectively. The total RSS is decreasing as the number of regions increases by
recursive splitting while it is increasing slowly when the algorithm merges the
regions. Figure 8 illustrates that our CART splitting algorithm produced 126
terminal regions under the condition that the F-statistic for splitting a region
should be greater than 2.71 (with a significance level of 0.1). In addition, this
figure compares the results from merging adjacent regions using different
stopping rules. The final number of regions after merging was 109 with a
significance level of 0.5 and 44 with a significance level of 0.01. In more detail,
17
the merging was stopped when the maximum p-value was less than or equal to
the given significance level.
3700
Total RSS
3200
2700
Splitting
Joining0.01
2200
Joining0.5
1700
1200
0
50
100
150
No.of regions
Figure 8 Total residual sums of squares observed during: (i) the binary
splitting, (ii) merging of regions with significance level 0.01, and (iii) merging of
regions with significance level 0.5.
Figure 9 shows the adjusted temperature after removing the cumulated level
shifts from the original cell value. It can be seen that the temperature in each
series moves along its main trend with small fluctuation and there are no
obvious level shifts although there are still some outliers. The splitting
algorithm detected 131 change-points while there were 92 change-points left
after merging adjacent regions. The algorithm worked well in the sense that it
produced a large number of homogeneous rectangles and then reduced the
model complexity by removing superfluous segments. We regarded the abrupt
level shifts as false or artificial changes. Accordingly, the corrected series
obtained by removing cumulated level shifts should provide a more realistic
picture of the variation in temperature over time.
18
Station 1
14
Station 2
Corrected temperature
Station 3
Station 4
9
Station 5
Station 6
4
Station 7
Station 8
-1
1900
1920
1940
1960
1980
2000
Station 9
Station 10
Station 11
-6
Year
Station 12
Figure 9 Cell means after removing cumulated level shifts.
15
Predicted value
10
-10
5
0
-5
0
5
10
15
20
-5
-10
Observational value
Figure 10 Predicted versus observed values, when the model selection was
based on 10-fold cross-validation with 0.01 as the significance level for
stopping the merging of regions.
Predictions and prediction errors obtained from the ten-fold cross-validation
method are plotted in figures 10 and 11. The first one describes the
goodness-of-fit of the prediction model. The second graph shows the prediction
errors versus its corresponding predictions. As can be seen, the residuals have
zero mean and small variance, which also indicates that the predicted values
are reasonable.
19
6
4
Predicted errors
2
0
-10
-5
-2
0
5
10
15
-4
-6
-8
Prediction
Figure 11 Prediction errors versus predicted values obtained by 10-fold
cross-validation with 0.01 as significance level for stopping the merging of
regions.
5.1
Analysis of observational water quality data
The integration of our tree model into a back-fitting algorithm that alternates
between estimation of smooth trends and change-points enabled a
decomposition of a given vector time series into: (i) a smooth trend surface, (ii)
a piecewise constant function representing abrupt level shifts, and (ii) irregular
variation or noise. The results obtained are illustrated in figures 12-15.
Mean total-P
7,3
7,2
7,2-7,3
7,1
7,1-7,2
7
7-7,1
6,9
6,9-7
6,8
1991 1993
"D0.5"
1995 1997
1999 2001
2003 2005
Figure 12 Corrected trend surface
20
6,8-6,9
Cumulated level shifts
2
1
1-2
0
0-1
-11991 1993 1995 1997
1999 2001
-2
"D0.5"
2003
-1-0
-2--1
2005
-3--2
-3
Year
Noise
Figure 13 Cumulated level shifts standardized to mean zero.
2
1,5
1
0,5
0
-0,51991
1993 1995
1997 1999
-1
2001
-1,5
1,5-2
1-1,5
0,5-1
0-0,5
"D0.5"
2003
2005
-0,5-0
-1--0,5
-1,5--1
Year
Figure 14 Noise
6 Discussion and conclusions
Detection of an unknown number of change-points in vector time series of data
is a computationally demanding task. This is particularly true for change-point
detections integrated into larger algorithms where the detection step is repeated
many times. The work presented in this thesis demonstrated that the
21
computational burden can be substantially reduced by using a tree algorithm to
identify a set of candidate change-points.
Our tree algorithm in which the space of time points and vector coordinates is
partitioned into rectangular is very fast. This is so because the binary splitting
is based solely on the number of observations and their sum in rectangular
subsets of the input domain. Theoretically, the binary splitting is an O(n)
algorithm, i.e. the computational burden is approximately proportional to the
number of observations. The dynamic programming algorithm described by
Hawkins (2001) is an O(n2) algorithm that will take much longer time for large
datasets.
The merging of rectangles into larger subsets of more complex shape is also a
fast process, because it is based solely on the number of observations and their
sum in the already identified regions or segments. In addition, the number of
candidate change-points is typically much smaller than the number of
observations. Test runs involving surrogate temperature data confirmed the
computational speed of our tree algorithm.
The integration of our tree algorithm into a back-fitting algorithm that
alternates between estimation of smooth trends and change-points is still in its
infancy. However, our test runs involving water quality data demonstrated that
such algorithms can be used to partition a vector time series into three parts: (i)
a smooth trend surface, (ii) a piecewise constant function representing abrupt
level shifts, and (iii) irregular variation or noise.
The stopping rules for growing and reducing our tree model require further
work. We used hypothesis testing and cross-validation for the model selection,
but none of these methods performed satisfactorily. The F-tests are not
theoretically correct, because we considered the maximum gain or loss for
22
large sets of splitting and merging operations. Cross-validation has previously
been successfully used to fit smooth response surfaces to observed data
(Grimvall et al., 2008). However, when the model includes abrupt level shifts
at unknown time points it is not obvious how models fitted to training sets shall
be used to predict the response at untried points.
Despite the preliminary character of much of the work in this thesis, it shall not
lessen the achievements that have been made. There is obviously a great
demand for methods that can detect and estimate abrupt level shifts in the
presence of smooth trends, and our work shows that using a tree algorithm to
identify a set of candidate change-points is a key step in the development of
such algorithms.
7 Literature
[1] Alexandersson H. (1986). A homogeneity test applied to precipitation data.
Journal of Climatology 6:661-675.
[2] Caussinus, H., and Mestre, O. (2004). Detection and correction of artificial
shifts in climate series, Applied Statistics 53: 405–425.
[3] Erdman C. and Emerson, J.W. (2008) A fast Bayesian change-point analysis
for the segmentation of microarray data. Bioinformatics 24:2143-2148.
[4] Grimvall A., Wahlin K., Hussian M., and von Bromssen C. (2008).
Semiparametric smoothers for trend assessment of multiple time series of
envirionmental quality data. Submitted to Environmetrics.
[5] Hastie T., Tisbshirani R., and Friedman J. (2001). The elements of statistical
learning: Data Mining, Inference, and Prediction. Springer: New York.
[6] Hawkins D.M. (1977). Testing a sequence of observations for a shift in
location. Journal of the American Statistical Association 68:941-943.
[7] Hawkins D.M. (2001). Fitting multiple change-point models to data
23
Computational Statistics & Data Analysis 37:323-341.
[8] Wahlin K, Grimvall A., and Sirisack S. (2008). Estimating artificial level
shifts in the presence of smooth trends. Submitted to Environmental
Monitoring and Assessment.
[9] Khaliq M.N. and Ouarda T. B. M. J. (2006). Short Communications on the
critical values of the standard normal homogeneity test (SNHT) Journal of
Climatology 27:681-687.
[10] Gey S. and Lebarbier E. (2008), Using CART to detect multiple
change-points in the mean for large samples. Technical report, Preprint
Statistics for Systems Biology 12.
[11] Picard F., Robin S., Lavielle M., Vaisse C., and Daudin J. (2005). A
statistical approach for array CGH data analysis. BMC Bioinformatics. 6:1-14.
[12] Sristava M.S. and Worsley K.J. (1986). Likelihood ratio test for a change
in multivariate normal mean. Journal of the American Statistical Association
81:199-204.
[13] Worsley K.J. (1979). On the likelihood ratio test for a shift in location of
normal population. Journal of the American Statistical Association 74:365-367.
24
8 Appendix
Table 1 PRESS corresponding to different significance levels derived from
ten-fold and leave-one-out cross-validation. The smallest PRESS in each
method is highlighted by yellow shadow and their corresponding alpha levels
are selected as significance levels used to stop the merging process.
Ten-fold CV
Significance level
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.01
0.001
0.0001
0.00001
0.000001
2536.2
2531.9
2531.2
2533.1
2526.7
2547.1
2560.9
2626.6
2645.7
2792.8
2785.8
2902.3
3083.4
3219.7
25
Leave-one-year-out CV
PRESS value
3788.6
3789.8
3787.0
3785.1
3786.6
3782.6
3796.1
3795.2
3772.6
3658.2
3725.1
3694.9
3738.0
3811.1
Table 2 Rectangle output derived from tree algorithm after the merging
procedure
Region
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
No. obs
35
13
47
17
70
9
99
21
105
25
54
34
63
18
35
14
48
12
5
21
13
3
7
10
1
36
1
4
20
17
1
1
14
1
10
6
27
4
65
11
1
7
13
2
Mean
-0.2
6.4
3.0
3.9
-1.8
0.6
11.0
7.3
7.4
4.4
-0.1
-1.1
3.9
2.1
4.8
1.2
13.4
4.3
4.1
8.4
8.9
1.8
1.0
11.8
-4.8
1.5
5.9
4.3
5.0
8.0
5.2
5.6
13.3
-4.4
8.5
1.9
1.3
10.2
9.2
2.3
-2.9
2.2
5.9
13.5
26
SSR
72.3
11.8
68.5
21.8
142.8
8.4
171.2
43.0
262.8
27.2
142.3
74.8
97.5
25.0
45.6
9.7
87.1
10.6
5.7
38.9
12.7
0.1
6.4
4.2
0.0
46.2
0.0
3.9
14.6
18.2
0.0
0.0
8.6
0.0
8.1
1.0
32.7
4.2
103.5
14.8
0.0
2.1
13.7
3.1
Table 3 is the final detection of change-points derived by our tree algorithm.
There are 92 change-points detected by implementing the whole tree
algorithm and they are presented by when and where the change-point has
occurred and how large is the level shift. “Nr” denotes the index of the
change-points; “Y” represents the vector coordinate, “S” indicates when the
change-point has occurred and “Level shift” evaluates the change in mean.
Detected change-points Detected change-points
Detected change-points
Nr. Y S Level shift Nr. Y S Level shift Nr. Y S Level shift
1 1 14
2.2
32 4 82
2.5
63 8 46
-5.9
2 1 23
1.8
33 5 14
2.0
64 8 48
1.8
3 1 27
-8.7
34 5 34
2.5
65 8 81
2.7
4 1 28
6.3
35 5 38
-7.1
66 9 5
3.7
5 1 45
4.4
36 5 39
3.5
67 9 8
-3.7
6 1 46
-7.7
37 5 46
-3.5
68 9 12
3.7
7 1 81
3.0
38 5 62
1.1
69 9 15
2.5
8 2 14
2.2
39 5 82
2.4
70 9 18
-2.5
9 2 23
1.8
40 6 3
-2.4
71 9 45
2.4
10 2 27
-2.3
41 6 13
2.4
72 9 46
-5.9
11 2 46
-3.3
42 6 42
-3.6
73 9 82
2.8
12 2 81
3.0
43 6 43
5.9
74 10 13
1.6
13 3 6
2.4
44 6 44
-5.9
75 10 26
2.1
14 3 9
-2.4
45 7 13
-5.8
76 10 29
-3.0
15 3 10
4.1
46 7 14
5.8
77 10 46
-3.6
16 3 11
-4.1
47 7 15
2.5
78 10 71
3.0
17 3 14
4.1
48 7 16
-7.8
79 10 75
-3.1
18 3 46
-4.0
49 7 17
7.8
80 10 81
3.1
19 3 82
1.3
50 7 38
-2.5
81 11 10
1.8
20 4 6
-1.9
51 7 40
2.4
82 11 45
-1.8
21 4 10
1.7
52 7 46
-5.9
83 11 46
-2.4
22 4 18
4.5
53 7 48
1.8
84 11 55
-1.7
23 4 19
-4.5
54 7 51
-1.8
85 11 56
2.4
24 4 20
2.0
55 7 52
1.8
86 11 80
3.0
25 4 33
-2.0
56 7 81
2.7
87 12 8
-5.4
26 4 45
3.5
57 8 4
-3.7
88 12 9
7.4
27 4 46
-7.5
58 8 5
6.2
89 12 46
-4.1
28 4 59
4.0
59 8 7
-2.5
90 12 79
2.4
29 4 60
-1.6
60 8 15
2.5
91 12 82
-4.2
30 4 71
-2.4
61 8 38
-2.5
92 12 83
4.7
31 4 76
1.9
62 8 40
2.4
27
Table 4 Water quality dataset representing phosphorus concentrations ( g/l) in
Lake Vänern.
Year
1991
1992
1993
1994
1995
1996
1997
1998
1999
2000
2001
2002
2003
2004
2005
Depth 0.5m
9.3
8
8.8
10.3
9.3
6
6
6.6
7
6.2
6.6
6.2
5.2
6
6.8
Depth10m
8.17
8.3
8.3
10.3
8.7
5.8
6.4
6
7.2
5.2
6.6
6
4.8
6.6
7
28
Depth20m
9.3
8.8
8.8
8.3
8.3
5.6
5.5
7.6
6.6
6
8.6
6.2
5.2
5.4
5.8