Introduction to Operating Systems Part II
advertisement

TDDD63
Agenda
Lecture I:
Computer Systems Overview
Introduction to
Operating Systems
Part II
Building and Executing Programs
Operating System Basics
Lecture II:
Interrupts and I/O
Christoph Kessler
System Calls
IDA, Linköping University
CPU Management
Memory Management
Copyright Notice: The slides partly use material from Silberschatz’s, Galvin’s and Gagne’s book (“Operating System
Concepts”, course book in TDDB68). No part of the lecture notes may be reproduced in any form, due to the copyrights
reserved by Wiley. These lecture notes should only be used for internal teaching purposes at the Linköping University.
File System
Protection and Security
Christoph Kessler, IDA,
Linköpings universitet.
2
C. Kessler, IDA, Linköpings universitet.
Computer System Organization
Computer-system operation
Interrupts and I/O
One or more CPUs, device controllers connected through
common bus providing access to shared memory
Concurrent execution of CPUs and devices,
competing for memory cycles
Copyright Notice: The slides partly use material from Silberschatz’s, Galvin’s and Gagne’s book (“Operating System
Concepts”, course book in TDDB68). No part of the lecture notes may be reproduced in any form, due to the copyrights
reserved by Wiley. These lecture notes should only be used for internal teaching purposes at the Linköping University.
Memory bus
Christoph Kessler, IDA,
Linköpings universitet.
4
C. Kessler, IDA, Linköpings universitet.
A Kernel I/O Structure
Background: Interrupt
Program execution (von-Neumann cycle)
Device
Controllers
Physical
Devices
Instruction Fetch
Instruction Decode
Instruction Execute
HARDWARE
Device
Drivers
SOFTWARE
by a processor
C. Kessler, IDA, Linköpings universitet.
Update Program Counter
5
C. Kessler, IDA, Linköpings universitet.
No way to react to events
not explicitly anticipated
in the (user) program code
6
1
Background: Interrupt
CPU – I/O Device Interaction (1)
Program execution (von-Neumann cycle)
I/O devices and the CPU can execute concurrently.
by a processor with interrupt logic
Each device controller has a local buffer.
CPU moves data from/to main memory to/from local buffers
Instruction Fetch
Save processor state
Instruction Decode
I/O is from the device to local buffer of controller.
Device controller informs CPU that it has finished its operation
Execute interrupt
service routine (ISR)
by causing
an interrupt.
Instruction Execute
Yes
Check for Interrupt
Restore processor state
No
Update Program Counter
7
C. Kessler, IDA, Linköpings universitet.
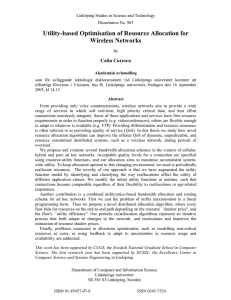
I/O Interaction using Interrupt
I/O Interaction using Interrupt
Example: Read from the keyboard (KBD)
System Bus
CPU + Memory
0: initiate I/O operation KBD_RD
Memory
Device
controller
OS Kernel
3:
ISR table
ISR’s
...
The device driver loads the
appropriate registers within the
device controller
The device controller
determines what action to take
based on the registers
Device
5:
Device driver 1
...
Device driver
KBD
4:
...
A OS buffer
User program code
8
C. Kessler, IDA, Linköpings universitet.
A
Local buffer
2: data
+ signal interrupt for KBD_RD
1:
token
3: call ISR for KBD_RD
4: ISR uses device driver KBD,
passes data to an OS buffer
5: return from interrupt
9
C. Kessler, IDA, Linköpings universitet.
CPU – I/O Device Interaction (2)
“read a character from
the keyboard”
The controller starts the transfer
of data from the device to its
local buffer
Once the transfer is complete,
the device controller informs the
device driver via an interrupt
that it has completed the
transfer.
10
C. Kessler, IDA, Linköpings universitet.
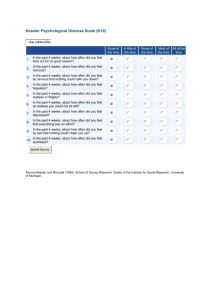
Synchronous vs. Asynchronous I/O
DMA = Direct Memory Access
allows for parallel activity of CPU and I/O data transfer
More efficient
for large-volume
data transfer
1
2
4
Synchronous I/O
3
User process waits for I/O operation
to complete
Can only have 1 I/O request
outstanding at any time
C. Kessler, IDA, Linköpings universitet.
Asynchronous I/O
11
C. Kessler, IDA, Linköpings universitet.
User process continues in
parallel to I/O operation, may
eventually need to check for
availability of the result
12
2
Interrupt (1)
Interrupt (2)
Interrupt transfers control to an interrupt service routine,
A trap is a software-generated interrupt
generally through the interrupt vector (IRV), a branch table that
contains the start addresses of all the service routines.
caused either by an error or a user request.
Examples: Division by zero;
Request for OS service
An operating system is interrupt driven.
Interrupt architecture must save the address of the interrupted
instruction.
How to determine which type of interrupt has occurred?
polling
vectored interrupt
C. Kessler, IDA, Linköpings universitet.
system: interrupt number indexes IRV
13
Interrupt Handling
Interrupt Timeline
Hardware + OS preserves the state of the CPU by
14
C. Kessler, IDA, Linköpings universitet.
Store registers and program counter (address of interrupted instruction)
for a device sending input
Determines which type of interrupt has occurred:
Polling (Continually checking a non-busy bit in device controllers’ status register)
Vectored interrupt system: Interrupt signal, number indexes into IRV table
Separate segments of code determine what action should be taken
Interrupt
for each type of interrupt
C. Kessler, IDA, Linköpings universitet.
Intel Pentium Processor Event Vector Table15
C. Kessler, IDA, Linköpings universitet.
Interrupt
16
Operating System Operations
Dual mode, system calls
CPU management
System Calls
Batch processing
Uniprogramming, Multiprogramming, Multitasking
Process management
Memory management
System call mechanism
System call API
Passing parameters
Types of system calls
File system and mass storage management
Protection and security
Copyright Notice: The slides partly use material from Silberschatz’s, Galvin’s and Gagne’s book (“Operating System
Concepts”, course book in TDDB68). No part of the lecture notes may be reproduced in any form, due to the copyrights
reserved by Wiley. These lecture notes should only be used for internal teaching purposes at the Linköping University.
Christoph Kessler, IDA,
Linköpings universitet.
C. Kessler, IDA, Linköpings universitet.
18
3
Example: I/O Protection
Dual mode, System calls
Dual-mode operation
allows OS to protect itself and other system components
All I/O instructions are privileged instructions.
Must ensure that a user program could never gain
Privileged
control of the computer in kernel mode
System
(i.e.,
a user program that, as part of its execution,
stores a new address in the interrupt vector)
C. Kessler, IDA, Linköpings universitet.
User mode and kernel mode (supervisor mode, privileged mode)
19
Dual-Mode Operation
instructions only executable in kernel mode
call changes mode to kernel, on return resets it to user
Mode bit provided by hardware
20
C. Kessler, IDA, Linköpings universitet.
Dual-Mode Operation (Cont.)
Sharing system resources requires the operating system to
When an interrupt or fault occurs, hardware switches to
ensure that an incorrect program cannot cause other
programs to execute incorrectly.
kernel mode.
System calls – call OS service
Hardware support (mode bit in CPU status register) to
differentiate between at least two modes of operations.
User mode
Interrupt/fault
Execution done on behalf of a user
Access only to memory addresses owned by the process
kernel
Kernel mode (also supervisor mode or system mode)
Execution done on behalf of operating system.
Privileged instructions
instructions that may be harmful,
e.g., system login, set priorities, system halt, I/O, etc.
Unrestricted memory access
C. Kessler, IDA, Linköpings universitet.
user
set user mode
21
Example of Using System Calls
C. Kessler, IDA, Linköpings universitet.
22
System Call API – OS Relationship
System call sequence to copy contents of one file to another
C. Kessler, IDA, Linköpings universitet.
23
C. Kessler, IDA, Linköpings universitet.
24
4
System Call API
Example of a System Call API
Programming interface to the services provided by the OS
ReadFile() function in Win32 API (function for reading from a file)
Typically written in a high-level language (C or C++)
Mostly accessed by programs via a high-level Application
Program Interface (API) rather than direct system call use
Most common system call APIs are
Win32 API for Windows,
POSIX API for POSIX-based systems
(including virtually all versions of UNIX, Linux, Mac OS X)
Parameters passed to ReadFile():
C. Kessler, IDA, Linköpings universitet.
25
System Call API Implementation
file — the file to be read
buffer — a buffer where the data will be read into and written from
bytesToRead — the number of bytes to be read into the buffer
bytesRead — the number of bytes read during the last read
ovl — indicates if overlapped I/O is being used
C. Kessler, IDA, Linköpings universitet.
26
Standard C Library Example
System call implementation is hardware-specific,
e.g. special trap instruction with a system call number passed
in a register, indexing the interrupt vector (branch table)
C program invoking printf(),
which calls write() system call
System call interface (usually, in C)
invokes the intended system call in OS kernel and
returns status of the system call and any return values
Advantage:
Caller does not need to know anything about how the
system call is implemented
Most details of OS interface hidden from programmer by
API
C. Kessler, IDA, Linköpings universitet.
27
Types of System Calls
C. Kessler, IDA, Linköpings universitet.
28
Examples of System Calls
Process control
load, execute, end, abort, create, terminate, wait ...
memory allocation and deallocation
File management
open, close, create, delete, read, write, get/set attributes...
Device management
request / release device, read, write, ...
Information maintenance
get / set time, date, system data, process / file attributes
Communications
create / delete connection, send, receive, ...
C. Kessler, IDA, Linköpings universitet.
29
C. Kessler, IDA, Linköpings universitet.
30
5
Solaris 10 dtrace Following System Call
System Programs
dtrace:
provide a convenient environment for program development and
execution.
dynamic tracing facility
instrument the code to
collect diagnostic
information during
runtime,
e.g. entry/exit of
functions
File management
Status information
File modification
Programming language support: Compilers, assemblers, debuggers...
Program loading and execution
Communications: Message passing, e-mail, web browser, ...
Some of them are simply user interfaces to system calls;
others are considerably more complex
U = User mode
Most users’ view of the operation system is defined by system programs,
not the actual system calls
K = Kernel mode
31
C. Kessler, IDA, Linköpings universitet.
32
C. Kessler, IDA, Linköpings universitet.
Summary: Interrupts and I/O
Operating System = OS Kernel + System Programs
Mediates all accesses to system resources
Interrupt-driven
Error
handling
Controlled
CPU Management
access to system resources, e.g.
–
I/O devices, DMA
–
CPU time sharing
Context Switching
()
CPU Scheduling
…
Dual-Mode (user mode, kernel mode)
Processes
Copyright Notice: The slides partly use material from Silberschatz’s, Galvin’s and Gagne’s book (“Operating System
Concepts”, course book in TDDB68). No part of the lecture notes may be reproduced in any form, due to the copyrights
reserved by Wiley. These lecture notes should only be used for internal teaching purposes at the Linköping University.
System Call API for portability
C. Kessler, IDA, Linköpings universitet.
Evolution of Shared Computing
Operating System Operations
Batch Processing
Dual mode, system calls
CPU management
Batch processing
Uniprogramming, Multiprogramming, Multitasking
Christoph Kessler, IDA,
Linköpings universitet.
33
No interaction between the computer and user at all
No overlap between I/O and CPU usage
Multi-Programming
Process management
CPU is wasted if a job waits for I/O
While one job waits for a resource, another job can run
Interactive Processing
Memory management
File system and mass storage management
Protection and security
C. Kessler, IDA, Linköpings universitet.
User interacts with computer
requires real-time processing
Helps explain the
need for and the
emergence of
Operating
Systems
I/O and CPU usage overlap
Time-Sharing / Multi-Tasking
35
Implemented through multi-programming
multiple users executing single task each on same CPU
Single user executing multiple tasks on same CPU
Multi-Processor machines
C. Kessler, IDA, Linköpings universitet.
36
6
Simple Batch Systems (1960’s)
Early Systems - Bare Machine (1950’s)
Reduce setup time by batching jobs with similar requirements
Hardware - expensive; Human - inexpensive
Add a card reader, Hire an operator
Structure
Large machines run from a console
Single user system
Programmer/User as operator
Automatically transfers control from one job to another
First rudimentary operating system
Paper tape or punched cards
Early Software
Assemblers, compilers, linkers, loaders,
device drivers, libraries of common subroutines
Secure Execution
One operator / no network
Inefficient use of expensive resources
User is not the operator (operator is an intermediary)
Automatic job sequencing
Low CPU utilization, high setup time
37
C. Kessler, IDA, Linköpings universitet.
Resident monitor
Holds initial control
control transfers to a job
when job completes control transfers back to the monitor
Problem
Need to distinguish jobs from each other
Need to distinguish data from program
Batch processing used today mainly for providing access to supercomputers
– exclusive use of (groups of) servers for single HPC application programs
38
C. Kessler, IDA, Linköpings universitet.
Batch Processing
Memory Layout for a Simple Batch System
Monitor
One program at a time
39
C. Kessler, IDA, Linköpings universitet.
Supervisor/Operator Control
40
C. Kessler, IDA, Linköpings universitet.
Uniprogramming
Secure monitor that controls job processing
Special cards indicate what to do
IBM 7094
%Fortran card, %load card
Running
User program prevented from performing I/O
User separated from computer
User(s) submit card deck(s)
cards put on tape
tape is processed by the operator
output is written to a tape
tape is printed on a printer
0
10
Running
110
Waiting
120
220
Process execution time:
CPU:
10 + 10 time units
I/O:
100 + 100 time units
Problems
Waiting
I.e., I/O intensive (200/220 = 90.9%), CPU utilization 9.1%
Long turnaround time - up to 2 days
Low CPU utilization
I/O and CPU could not overlap
Slow mechanical devices
C. Kessler, IDA, Linköpings universitet.
Single user with single program
cannot keep CPU and I/O devices busy at all times.
41
C. Kessler, IDA, Linköpings universitet.
42
7
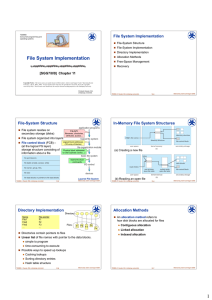
Multiprogramming
Multiprogramming with three programs
needed for efficiency
Multiprogramming organizes jobs
(code and data)
so CPU always has one to execute
A subset of total jobs in system
is kept in memory
One job selected and run
via job scheduling
When it has to wait (e.g., for I/O),
OS switches to another job
(kernel memory)
A
Running
B
Waiting (printer)
Running
C
Running
Waiting (disk)
Waiting
Running
Running Waiting (network)
Waiting
Running
Waiting
Running Running Running Waiting Running Running Running Waiting
combined
Memory layout for multiprogrammed system
C. Kessler, IDA, Linköpings universitet.
43
C. Kessler, IDA, Linköpings universitet.
Timesharing (Multitasking)
CPU time sharing using timer interrupt
extension of multiprogramming:
Timer to prevent infinite loop / process hogging resources
CPU switches jobs so frequently that users can interact with
each job while it is running
For interactive computer systems,
the response time should be short (< 1 second)
Each user has at least one program executing in memory
processes
If several jobs ready to run at the same time
CPU scheduling
If processes don’t fit in memory,
swapping moves them in and out to run
Virtual memory allows execution of processes not
completely in memory
C. Kessler, IDA, Linköpings universitet.
45
Set up to interrupt the computer after specific period
System decrements counter at clock ticks
When counter = zero, generate an interrupt
So, OS regains control and can reschedule or terminate a
program that exceeds allotted time
C. Kessler, IDA, Linköpings universitet.
44
46
Interactive Processing
CPU time sharing using timer interrupt
On-line communication between the user and the system:
Example: Switching between two processes
when the OS finishes execution of one command,
it seeks the next “control statement” from the user’s keyboard.
On-line system must be available for users to access data and code.
Relatively frequent context switching
C. Kessler, IDA, Linköpings universitet.
47
”time quantum” = usually a few milliseconds per process at a time
C. Kessler, IDA, Linköpings universitet.
48
8
Process Management
Process Concept
A process is a program in execution.
Process = a program in execution
A unit of work within the system.
Program is a passive entity, process is an active entity.
Process needs resources to accomplish its task
CPU, memory, I/O, files
Initialization data
Process termination reclaim of any reusable resources
Single-threaded process: has one program counter
specifying location of next instruction to execute
Process executes instructions sequentially, one at a time, until
completion
Multi-threaded process: has one program counter per thread
Typically, a system has many processes (some user, some system pr.)
running concurrently on one or more CPUs
Concurrency by multiplexing the CPUs among the processes / threads
C. Kessler, IDA, Linköpings universitet.
49
A process includes:
text section
(loaded program)
program counter
stack (+ heap)
data section
(global variables)
process
in memory
Remark: [SGG7] uses the terms job and process almost interchangeably.
C. Kessler, IDA, Linköpings universitet.
Process State
Process Control Block (PCB)
As a process executes, it changes state
Information associated with each process
new: The process is being created
running: Instructions are being executed
waiting: The process is waiting for some event to occur
ready: The process is waiting to be assigned to a process
CPU registers
terminated: The process has finished execution
CPU scheduling information
50
Process state
Program counter
Memory-management information
Accounting information
I/O status information
C. Kessler, IDA, Linköpings universitet.
51
CPU Switch From Process to Process
C. Kessler, IDA, Linköpings universitet.
52
Context Switch
When CPU switches to another process, the system must
save the state of the old process
and load the saved state for the new process
Context-switch time is overhead
C. Kessler, IDA, Linköpings universitet.
53
the system does no useful work while switching
time depends on hardware support
C. Kessler, IDA, Linköpings universitet.
54
9
Process Creation in UNIX
A typical tree of processes in Solaris
int main()
C program forking
{
fork system call
a separate process
Pid_t ret;
creates new child process
/* fork another process: */
exec system call
ret = fork();
if (ret < 0) { /* error occurred */
used after a fork to replace
fprintf ( stderr, "Fork Failed“ );
the process’ memory space
exit(-1);
with a new program
}
wait system call
else if (ret == 0) { // I am child process:
execlp ( "/bin/ls", "ls", NULL );
by parent, suspends parent
execution until child process }
else { // I am the parent process
has terminated
// of child process with PID==ret
/* wait for child to complete: */
wait (NULL);
printf ("Child complete");
exit(0);
}
C. Kessler, IDA, Linköpings universitet.
}
55
56
C. Kessler, IDA, Linköpings universitet.
Ready Queue And Various I/O Device Queues
Process Scheduling Queues
Job queue
set of all processes in the system
Ready queue
set of all processes residing in main memory, ready and
waiting to execute
Device queues
set of processes
waiting for an
I/O device
Processes migrate
among the various
queues
C. Kessler, IDA, Linköpings universitet.
57
58
C. Kessler, IDA, Linköpings universitet.
Inter-Process Communication (IPC)
Schedulers
2 Fundamental Models – Realization by OS
Long-term scheduler (or job scheduler)
for batch systems – new jobs for execution queued on disk
selects which processes should be brought into the ready
queue, and loads them into memory for execution
controls the degree of multiprogramming
invoked very infrequently (seconds, minutes)
No long-term scheduler on UNIX and Windows;
instead swapping, controlled by medium-term scheduler
Short-term scheduler (or CPU scheduler)
selects which ready process should be executed next
invoked very frequently (milliseconds)
must be fast
C. Kessler, IDA, Linköpings universitet.
IPC via Message Passing
59
Send and Recv system calls
must be granted by the OS,
may use kernel-space
buffering
for messages (M)
C. Kessler, IDA, Linköpings
universitet.
IPC via Shared Memory
Setup of a shared memory section
(via system calls) must be granted
by the OS, thereafter access by
Load/Store by each process
60
10
Cooperating Processes
Summary: Process Management Activities
Independent process
The OS is responsible for:
cannot affect or be affected by execution of another process
Creating and deleting both user and system processes
Cooperating process
Suspending and resuming processes
can affect or be affected by execution of another process
Providing mechanisms for process synchronization
Advantages of process cooperation:
Information sharing
Computation speed-up
Modularity
Convenience
Providing mechanisms for process communication
Parallel Computing: TDDC78, TDDD56
In special cases: Providing mechanisms for deadlock handling
Inter-Process Communication (IPC)
shared memory
message passing
signals
61
C. Kessler, IDA, Linköpings universitet.
62
C. Kessler, IDA, Linköpings universitet.
Operating System Operations
Dual mode, system calls
CPU management
Memory Management
Batch processing
Uniprogramming, Multiprogramming, Multitasking
Process management
Memory management
File system and mass storage management
Protection and security
Copyright Notice: The slides partly use material from Silberschatz’s, Galvin’s and Gagne’s book (“Operating System
Concepts”, course book in TDDB68). No part of the lecture notes may be reproduced in any form, due to the copyrights
reserved by Wiley. These lecture notes should only be used for internal teaching purposes at the Linköping University.
Christoph Kessler, IDA,
Linköpings universitet.
64
C. Kessler, IDA, Linköpings universitet.
Simple Memory Protection
Memory Management
Use of a Base and Limit Register
Memory: A large array of words or bytes, each with its own address
Kernel
memory
Primary storage – directly accessible from CPU
shared by CPU and I/O devices
a volatile storage medium
All data in memory before and after processing
All instructions in memory in order to execute
Memory management determines what is in memory when.
Optimizing CPU utilization and memory utilization
OS memory management activities
Keeping track of which parts of memory are currently being used
and by whom
Deciding which processes (or parts thereof) and data to move
into and out of memory
Allocating and deallocating memory space as needed
C. Kessler, IDA, Linköpings universitet.
Hardware support for memory protection
65
C. Kessler, IDA, Linköpings universitet.
66
11
Virtual Memory
Memory Protection
Must provide memory protection at least for the interrupt
vector and the interrupt service routines
(in kernel memory)
For memory protection, add two registers that determine the
range of legal addresses that a process (running program)
may access:
Base register – holds the smallest legal physical memory
address of this process.
Only part of the program needs to be in memory for execution.
When executing in kernel mode, the process has
unrestricted access to both kernel’s and user’s memory
The load instructions for the base and limit registers are
privileged instructions, can only be set by system calls.
This will later be extended to virtual memory ( TDDB68)
C. Kessler, IDA, Linköpings universitet.
67
One can then allow programs larger than physical memory.
Logical address space can therefore be much larger than
physical address space.
Allows address spaces to be shared by several processes.
Allows for more efficient process creation.
Limit register – contains the size of the range
Memory outside the defined range is protected:
Virtual memory provides separation of the user process’s
logical memory (contiguous, starting at relative address 0)
from physical memory.
68
C. Kessler, IDA, Linköpings universitet.
Virtual Memory that is Larger than Physical Memory
File Systems
and Secondary Storage Management
Copyright Notice: The slides partly use material from Silberschatz’s, Galvin’s and Gagne’s book (“Operating System
Concepts”, course book in TDDB68). No part of the lecture notes may be reproduced in any form, due to the copyrights
reserved by Wiley. These lecture notes should only be used for internal teaching purposes at the Linköping University.
C. Kessler, IDA, Linköpings universitet.
Christoph Kessler, IDA,
Linköpings universitet.
69
Operating System Operations
Mass-Storage Management (1)
Dual mode, system calls
Disks (including SSD) used to store data that do not fit in
main memory or must be kept for a “long” period of time.
CPU management
Batch processing
Uniprogramming, Multiprogramming, Multitasking
Process management
Secondary storage
OS activities:
Free-space management
Storage allocation
Disk scheduling
Memory management
File system and mass storage management
Critical for system performance
Protection and security
Some storage need not be fast
C. Kessler, IDA, Linköpings universitet.
71
Tertiary storage
optical storage, magnetic tape...
Still must be managed
C. Kessler, IDA, Linköpings universitet.
72
12
Mass-Storage Management (2)
Protection and Security
OS provides uniform, logical view of information storage
Protection – any mechanism for controlling access of processes or users
Abstracts from physical to logical storage unit: file
Each medium (disk, tape, flash, …) has different properties:
access speed, capacity, data transfer rate, sequential/random access
OS File-System management
Files usually organized into directories
OS activities include
Creating and deleting files and directories
Primitives to manipulate files and directories
Access control
Mapping files onto secondary storage
Backup files to tertiary storage
Security – defense of the system against internal and external attacks
Huge range, including denial-of-service, worms, viruses, Trojan horses,
buffer overflow / overread, identity theft, theft of service
Policies for configuring / coordinating the OS’ protection mechanisms
Systems generally first distinguish among users,
to determine who can do what
TDDB68
C. Kessler, IDA, Linköpings universitet.
to resources defined by the OS
User identities (user IDs, security IDs
associated with all files, processes of that user
Group IDs
TDDB68
73
Summary:
Operating System Services
74
C. Kessler, IDA, Linköpings universitet.
Case study: LINUX
Linux is a modern, free operating system based on UNIX standards.
First developed as a small but self-contained kernel in 1991 by Linus
Torvalds, with the major design goal of UNIX compatibility.
Linux is a multiuser, multitasking system with a full set of UNIX-compatible
tools..
Its file system adheres to traditional UNIX semantics, and it fully
implements the standard UNIX networking model.
Main design goals are speed, efficiency, and standardization.
The core Linux operating system kernel is entirely original, but it can run
much existing free UNIX software, resulting in an entire UNIX-compatible
operating system free from proprietary code.
C. Kessler, IDA, Linköpings universitet.
75
Where are We?
Components of a Linux System
Abstraction
Like most UNIX implementations, Linux is composed of three main bodies of code;
Software Eng
the most important distinction being between the kernel and all other components.
Kernel code executes in kernel mode with full access to all physical resources
Methodology
Software Engineering
Compiler Design
of the computer.
76
C. Kessler, IDA, Linköpings universitet.
All kernel code and data structures are kept in the same single address space
Operating Systems
The system libraries define a standard set of functions through which applications
interact with the kernel, and which implement much of the operating-system functionality
that does not need the full privileges of kernel code.
Systems
Operating Systems, Compilers
Programming
Assembly Language
Programming
Machine Language
The system utilities perform individual specialized management tasks.
Computer Systems
Discrete Mathematics
Information Theory
Digital Electronics
Signals & Systems
C. Kessler, IDA, Linköpings universitet.
77
Electronics
Hardware
Computer Architectures
Computation
Arithmetical & Logical Computations
Information
Bits, Bytes, Words, Representations
Hardware
Logical Gates & Networks
Hardware
Transistors, Circuits & Processors
C. Kessler, IDA, Linköpings universitet.
78
13