Communication Scheduling for Time-Triggered Systems Paul Pop, Petru Eles and Zebo Peng
advertisement

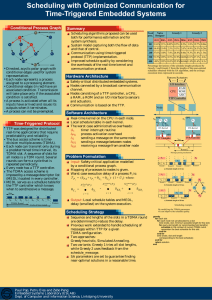
Communication Scheduling for Time-Triggered Systems Paul Pop, Petru Eles and Zebo Peng Dept. of Computer and Information Science Linköping University Sweden Communication Scheduling for Time-Triggered Systems Slide 1 Conditional Process Graph Subgraph corresponding to DCK P0 P1 C P2 P6 K P5 P7 D P3 C C P4 D P11 P8 P9 P14 Communication Scheduling for Time-Triggered Systems P13 K P15 P16 P17 P10 First processor Second processor ASIC P12 P18 Slide 2 Hardware Architecture • Safety-critical distributed embedded systems. I/O Interface • Nodes connected by a broadcast communication channel. RAM ROM CPU • Nodes consisting of: TTP controller, CPU, RAM, ROM, I/O interface, (maybe) ASIC. ASIC TTP Controller • Communication between nodes is based on the time-triggered protocol. Node • Buss access scheme: time-division multipleaccess (TDMA). • Schedule table located in each TTP controller: message descriptor list (MEDL). S0 S 1 Slot S2 S3 S0 S1 S2 S3 TDMA Round Cycle of two rounds Communication Scheduling for Time-Triggered Systems Slide 3 Problem Formulation Input • Safety-critical application with several operating modes. • Each operating mode is modelled by a conditional process graph. • The system architecture and mapping of processes to nodes are given. • The worst case delay of a process is known: TPi ( PA t Pi C1 C2 ) C 1 local N out ( Pi ) i 1 Si C 2 remote N out ( Pi ) i 1 KS i N inremote( Pi ) i 1 KRi Output • Local schedule tables for each node and the MEDL for the TTP controllers. • Delay on the system execution time for each operating mode, so that this delay is as small as possible. Communication Scheduling for Time-Triggered Systems Slide 4 Scheduling Example P1 P4 P3 P2 24 ms S1 S0 Round 1 m3 m1 m2 Round 2 Round 3 m4 Round 4 P1 S1 Round 1 m1 m1 P3 P2 m2 Round 2 m3 Round 3 Round 4 P4 20 ms P2 S1 Round 1 m1 m2 Round 2 Communication Scheduling for Time-Triggered Systems m2 m4 P1 S0 P1 P4 22 ms S0 Round 5 P2 P3 m3 m4 P3 m3 m4 P4 Round 3 Slide 5 Experimental Results Average percentage deviations from the lengths of near-optimal schedules % 60 50 • The Greedy Approach is producing accurate results in a very short time (few seconds for graphs with 400 processes). Naive Designer Greedy 1 Greedy 2 • Greedy 1 performs slightly better than Greedy 2, but it is a bit slower. 40 30 • SA finds near-optimal results in a reasonable time (few minutes for graphs with 80 processes and 275 minutes for graphs with 400 processes). 20 • A real-life example implementing a vehicle cruise controller validated our approach. 10 0 80 160 240 320 400 Number of processes Communication Scheduling for Time-Triggered Systems Slide 6