Patrick Doherty and Fredrik Heintz, Linköping University, Sweden

Delegation ‐ Based Collaboration
Patrick
Doherty
and
Fredrik
Heintz,
Linköping
University,
Sweden
Cooperative robotic systems are becoming technologically mature enough to be integrated into civil society. To gain practical use and acceptance, a verifiable, principled and well ‐ defined foundation for interactions between human operators and autonomous systems is needed. This poster presents an overview of such a formally grounded collaboration framework.
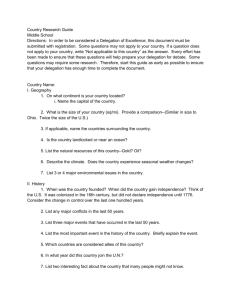
The conceptual basis for our collaboration framework is a triad of fundamental, interdependent issues: delegation, mixed ‐ initiative interaction and adjustable autonomy. The concept of delegation is particularly important and provides a bridge between mixed ‐ initiative interaction and adjustable autonomy.
Delegation
Delegate(A, B, task, constraints)
Adjustable
Autonomy
By varying the task and constraint parameters, the degree of autonomy allowed can be controlled.
Mixed
‐
Initiative
Interaction
Delegate(GOP, UAV, task, constraints)
Delegate(UAV, GOP, task, constraints)
Important: Safety, security, trust, etc.
Delegation as a Speech Act
We propose a formal logical characterization of delegation in the form of a speech act S ‐ Delegate(A, B, τ ) where A and B are agents and τ is a task. A task is a tuple ( α , φ , cons ), where α is a plan, φ the goal associated with that plan, and cons is a context representing collections of constraints which often include timing and resource constraints.
From the perspective of adjustable autonomy, the task definition is very flexible. A task delegated with a goal, no plan and few constraints, allows the agent to use much of its autonomy in solving the task, whereas a task specified as a specific sequence of actions and many constraints allows only limited autonomy. There are many variations between these two extremes and these variations capture the different levels of autonomy and trust exchanged between two agents.
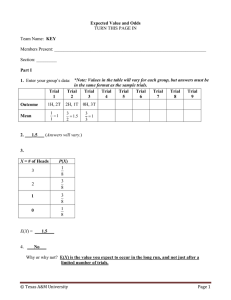
Task Specification Trees (TSTs)
A TST is a declarative representation of a complex multi ‐ agent task. TSTs are highly flexible, sharable, dynamically extendable during runtime, distributed in nature and can be directly mapped to executable procedures in a robotic architecture.
• A TST is a tree with nodes , where each node corresponds to a task . Each node has a node interface with parameters and a set of node constraints that restrict the parameters.
• There are currently seven types of nodes: Goal, sequence , concurrent , select , foreach , loop , and elementary action .
• A TST is also associated with a set of tree constraints expressing constraints between tasks in the tree.
N
0
S
Interface: t s0
, t e0
Task: sequence( α
1
, α
4
)
α
1
Interface: t s1
, t e1
Task: concurrent( α
2
, α
3
)
Interface: t s2
, t e2
Area
,
A
, Speed
2
Task: scan(Area
A
, Speed
2
)
α
2
N
2 scan
N
1
C
N
4 flyto
α
4
Interface: t
Task: s4
, t e4 flyto(Dest,
, Dest, Speed
4
Speed
N
3 scan
α
3
Interface: t s3
, t e3
, Area
B
, Speed
3
Task: scan(Area
B
, Speed
3
)
4
)
Area
A
Area
B
Dest
Mission: First scan Area
A and Area
B
, then fly to Dest .
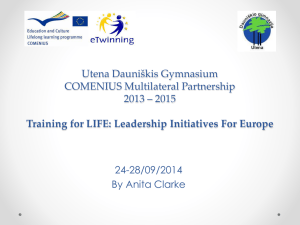
The Delegation Process
Finding a platform satisfying the preconditions of the S ‐ Delegate speech act is equivalent to finding a platform which is able to achieve the task either itself or through a recursive delegation process. This process includes a task allocation problem where each task in the TST should be allocated to an agent.
We suggest an auction ‐ based heuristic search algorithm for allocating a fully expanded TST to a set of platforms. To check the consistency of a partial allocation, a distributed constraint satisfaction approach is used. A successful allocation allocates each node to a platform and assigns values to parameters such that each task can be carried out by its assigned platform and all the constraints of the TST are satisfied.
During execution these constraints can be continually verified in order to make sure that the task can still be achieved. If a constraint is violated then a recursive repair process is started.
S
N
0
S
0
E
0
P
1
N
1 S
1
C
E
1
N
2 scan
S
2
E
2 scan
S
3
E
3
N
3 flyto
S
4
E
4
N
4
P
2
Preliminary Results
A first iteration of the delegation ‐ based collaboration framework has been implemented and integrated in an unmanned aircraft system. The system has been applied in several sophisticated emergency services scenarios where a human operator interacts with multiple unmanned aerial vehicles. The complete system has been tested in simulation and some parts have also been tested during real flights. We are currently evaluating different constraint solving techniques for the type of distributed, dynamic and incremental constraint problems generated by the delegation process.
Selected publications:
Doherty, Heintz, and Landén.
A Delegation ‐ Based Architecture for Collaborative Robotics.
In Weyns and Gleizes (Eds.): AOSE 2010, LNCS Spring Verlag ,2011.
Doherty, Landén and Heintz.
A Distributed Task Specification Language for Mixed ‐
Initiative Delegation.
Proc PRIMA, 2010.
Doherty, Kvarnström and Szalas.
Temporal Composite Actions with Constraints, KR 2012.
Landén.
Complex Task Allocation for Delegation: From Theory to Practice.
Licentiate
Thesis, Linköping University, 2011.
Landén, Heintz and Doherty.
Complex Task Allocation in Mixed ‐ Initiative Delegation:
A UAV Case Study.
Proc PRIMA, 2010.

![[MTSU LETTERHEAD] ATTACHMENT I Policy I:01:26](http://s2.studylib.net/store/data/012184766_1-8ec0a3b916624cbf1abb10106ecadd65-300x300.png)