An Implantable Movement Sensor MSc Project Report
advertisement

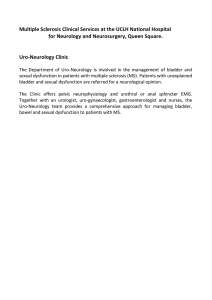
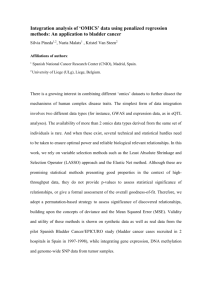
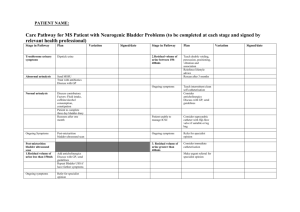
An Implantable Movement Sensor MSc Project Report Author: Jorge Chacon Caldera Supervisor: Professor Nick Donaldson 21/07/2010 MSc Biomedical Engineering and Medical Imaging Department of Medical Physics University College London Word Count: 8,948 Abstract Neurological disorders can cause urge incontinence and provoke the lack of urgency-to-void sensation known as the micturition reflex, this can produce excessive stretching of the bladder, a permanent increase of its capacity and a decrease of compressive force of the detrusor muscle; incomplete voidance of the bladder is a common problem under those circumstances. Residual urine can cause renal failure which is a considerable mortality cause for neurological incontinent patients. The lack of sensation also produces stress incontinence as a full bladder can leak out urine due to increased vesicular pressure. An electronic circuit for an externally powered implant has been successfully built. The circuit is able to measure the size of the bladder using a silicone tube filled with saline as sensor that changes its resistance when it is stretched. The sensor is meant to be implanted around the bladder so as the bladder expands, it stretches the sensor. Pulses are generated by the implant at repetition frequencies depending on the sensor. The pulses are received outside the body by a signal processing unit; implant power and signal reception from the implant is achieved using electromagnetic coupling. This report is intended to explain the construction and function of the implant circuit that can permanently provide information regarding the volume of the bladder. Acknowledgment I would like to thank Professor Nick Donaldson for his supervision, guidance and support, Dr. Anne Vanhoest, and all the people at the implant devices group for making this project possible. I feel very grateful to Professor Alan Cottenden, Dr. Marin Fry, BEMI lecturers and colleagues for their contributions to the project. Finally, I would like to express my gratitude and appreciation to CONACYT for the financial support and my family for both the economical and emotional unconditional support. Chapter 1 Introduction 1 1.1 Aims of the project 2 1.2 Motivations 2 1.2.1 Estimation of the bladder size using imaging methods 2 1.2.2 Estimation of the bladder size using implants 2 1.3 Layout of Report 3 Chapter 2 Literature Review 4 2.1 Clinical Review 4 2.1.1 Incontinence 5 2.2 Electronics Review 6 Chapter 3 Passive Electronics circuit development 7 3.1 Passive Electronics Circuit Theory 7 3.1.1 Two pendulums transfer of energy 7 3.1.2 Two pendulums electrical equivalence 8 3.1.3 Electromagnetic coupling requirements 10 3.2 Passive Electronics Circuit Experiment 10 3.2.1 Two pendulums experiment 10 3.2.2 RLC passive implant experiment 13 3.2.3 Detection of signals outside the body 14 3.2.3.1 Sensitivity improvement by increasing Electromagnetic Field 14 3.2.3.2 Sensitivity improvement by resonance 15 3.2.3.3 RLC signal readout outside the body 16 3.2.3.4 Improving the RLC signal readout outside the body 17 Chapter 4 Active Electronics circuit development 20 4.1 Active Electronics Circuit Theory 20 4.2 Active Electronics Circuit Experiment 21 4.2.1 Design of the active implant 22 4.2.2 Operation of the active implant 22 4.2.3 Design of the external circuit 23 4.2.3.1 Power generation and power transmission to the implant 23 4.2.3.2 Signal detection and signal processing outside the body 25 Chapter 5 Sensor development 27 5.1 Sensor theory 27 5.2 Sensor Experiment 29 5.2.1 Operation of the sensor 29 5.2.2 Location of the sensor in the implant circuit 29 5.2.3 Finding the optimal resistance value 29 5.2.4 Sensor characteristics 31 Chapter 6 Performance Measurements 34 Chapter 7 Discussion 37 Chapter 8 Conclusions and Future Work 38 References 39 Personal Contact Details 41 Chapter 1 Introduction A silicone rubber tube filled with saline will be designed to be implanted surrounding the bladder so its length and cross-sectional area can be modified as the bladder expands or contracts. The saline solution (“a solution of 0.91% w/v of NaCl, about 300 mOsm/L” [1]) contained within the tube has resistive properties that oppose the electrical current flow due to the resistivity of sodium and chlorine [2][3]. If inert platinum electrodes are placed on both ends of the tube and it is sealed with silicon, it is possible to connect the tube to an electronic circuit. The electronic circuit will pass an AC current through the tube to prevent electrolysis, this will cause the tube to act as a variable resistance whose value will be driven by the size of the bladder; a simple and reliable sensor that is inert and causes no harm by being implanted into the human body is created this way. The saline solution will not change its concentration since it is isotonic with the blood, which means that the concentration of the NaCl of blood and saline solution is similar. This also means that both the blood and the saline solution have the same resistivity, depending on the exact concentration but it is generally considered to be 150 ohmCm for normal concentration at body temperature [4]. The value of the resistance and therefore, the size of the bladder can be sent by the implant circuit to an external processing circuit outside of the body. The transmission of signals between the implant and the outside will be achieved using Electro Magnetic Coupling of two coils, one implanted and one outside the body as shown in the oversimplified diagram in Figure 1.1. Figure 1.1. The sensor (silicone tube) surrounding the bladder is represented in orange, the information then transmitted using electromagnetic coupling of the implant and the outside coils. The signal is then processed to know the size of the bladder. 1 1.1 Aims of the project The aim of this project is to build a simple implantable sensor that is able to size and detect the changes in the shape of the bladder to prevent over-distension of the bladder due to lack of filling sensation .This may be used in combination with a stimulator implant to prevent and/or decrease incontinence problems. The main specification for the project is simplicity. The implant has to be cost-effective and reliable. 1.2 Motivations According to the NHS, there are around 3 million people in the United Kingdom that suffer of incontinence [5]. “It costs an estimated $19.5 billion a year in the United States to manage urinary incontinence” [6]. One main restrain for solving urinary incontinence caused by neurological disorders is the need of information regarding the size of the bladder at any time. There have been several attempts to measure the size of the bladder. Two approaches are then manly taken: using medical imaging techniques and using implants. 1.2.1 Estimation of the bladder size using imaging methods It is a huge advantage to use medical imaging since it relies on non-invasive methods to estimate the size/volume of the bladder. “Ultrasonography is the gold standard technique for measuring bladder volume and post-void residual urine” [7], X-rays [8] and MRI [9] have also been used; although, there are important downsides to the imaging approach: There are no portable devices that can be estimating the size of the bladder permanently. This is crucial because the project is aiming to help neurological stress incontinent patients that require knowing the size of the bladder constantly to know when it is necessary to void it. The size of the bladder needs to be estimated from complicated algorithms that include empirical found approximation factors and are not sufficiently specific for each patient and therefore are not very reliable [10-14]. 1.2.2 Estimation of the bladder size using implants Not many implants have been created to know the size of the bladder and the ones that have been created are temporary implants using batteries and aimed to know the pressure inside the bladder and relate that pressure to the volume contained [15-18]. Although, in theory it can be a viable method, in practice, the pressure changes are small because the bladder is an elastic container and it adapts its size to hold more liquid without a significant increase of the inner pressure, which is also not linear [19]. The pressure inside the bladder or vesical pressure depends also on abdominal pressure and the detrusor pressure 2 following the relation Pves = Pdet + Pabd [20], the pressure inside the bladder will change with corporal movement and increased pressure on either the abdomen or the detrusor muscle [21]. They also use overcomplicated and expensive methods such as a wireless communication between the implant and the exterior and a pressure sensor inside the bladder driven by a microcontroller, the problems about this type of implants are the interference over wireless, their cost, the risk of failure of the microprocessor and the way of measuring the volume of urine stored in the bladder derived from the pressure. Another sensor to know the size of the bladder has been created by means of surrounding the bladder with elastic material that contained Polypyrrole as a strain gauge to provide a change in resistance; although the polypyrrole is biocompatible, the elastic fabric and therefore the sensor is not inert and it will be degraded with time, changing the output of the sensor. Further, to fully cover the bladder interferes more to the physiology of the bladder and the sensor does not consider the transmission of the value of the impedance to valuable information received outside the body [22]. The main motivation for the development of this implant is to help patients with neurological diseases to maintain or recover safe and appropriate dimensions of their bladder and improve the functioning of their urological system. 1.3 Layout of Report This document aims first to help the reader familiarize with the problem that the project is targeted to decrease or solve; information about incontinence and the bladder anatomy and physiology as well as the physics and electronic bases are presented in the literature review. Readers familiar with these subjects might like to skip the literature review. There is a separation between the sensor and the electronics since they can be developed separately. Technical information about the work carried out on the circuits begins on chapter 3 and 4, where electronics are treated more deeply. Theory, development and experiments applied to the sensor are presented in chapter 5. It is strongly recommended to the reader not to skip the theory in chapters 3, 4 and 5 so a general overview of the project can be acquired. 3 Chapter 2 Literature Review 2.1 Clinical Review The bladder is a vital part of the urologic system. It is an organ located in the pelvic cavity behind the pubic symphysis formed mainly from an extraordinarily flexible tissue and smooth muscle which is used for the storage of urine before the liquid is released from the body [23]. When the bladder contains no urine, it has the shape of a tetrahedron with one fixed vertex to the pelvic floor, such vertex is the neck of the bladder and it is connected to the urethra where the urine is released during the voiding phase of the bladder [24]. As the bladder receives liquid from the urethers its superior side expands as a balloon in slightly different shapes that vary from person to person but that can be validly approximated to a spherical or ovoid shape [25]. Oversimplifying, the bladder is an elastic reservoir which receives the urine from the kidneys through the urethers, generally holding a volume of around 500 ml in a normal adult person but its capacity can hold up to one litre [24]. The bladder sends signals through the nerves to let the brain know when it is reaching its volume limit and it is necessary to be emptied, something that we perceive as urgency to void; this is commonly known as micturiction reflex and it helps maintaining the volume stored inside the bladder within safe limits. Holding more urine than safe, at once, becomes almost impossible since the micturiction reflex can become so intense that it provokes an insufferable sensation and even pain before uncontrolled void happens to protect the bladder from over-distension. Over-distension nevertheless, is possible by exploding the viscoelastic properties of the bladder tissue. This means that the volume capacity of the bladder can be permanently increased over a period of time when excess of storage volume is repeatedly forced to remain in the bladder [26]. The bladder is innervated by the Lumbar and Sacral region of the spinal cord. If a neurological problem occurs and the sensory limb of the spinal reflex arc or the sensory components of the ascending spinal cord tracts are interrupted, the patient will not be aware of bladder filling and not receive any afferent stimuli from the bladder. The lack of micturiction reflex causes infrequent voiding as the patients do not know and tend to forget when they have to urinate. 4 Figure 2.1: the bladder is innervated by the Lumbar and Sacral region of the spinal cord. When there is an injury above those regions, the sensitive and sometimes the motor communication channels between the bladder and the brain are broken so the patient does not feel when it is necessary to void the bladder. Infrequent voiding develops large bladder capacity which affects the ability of the detrusor muscle to contract and empty the bladder, so if the sensory communication channel is broken, there is no way to know the volume that the bladder contains, this tends to overextend the bladder until a point where plastic deformation appears and it is no longer possible for the bladder to recover its original size when empty; this, added to the loss of muscle contraction power causes incomplete voidance of the bladder and bacteria can be formed inside the bladder causing very severe infections that could lead to death due to renal failure [27]. The motor control communication channel disruption between the brain and the muscles provokes a loss of the detrusor and pelvic floor muscles control and they get atrophied, becoming too weak to hold the stored urine inside the bladder when the vesicular pressure of the bladder increases naturally as the amount of liquid contained in the bladder also increases or due to an increase of abdominal pressure known as stress, this causes incontinence. The muscles then can be stimulated to help the bladder hold the urine, but even in this case, the knowledge of the volume of the bladder is required. 2.1.1 Incontinence “Incontinence is the unintentional leaking or release of urine” (NHS et al) due to a malfunction of the bladder mainly but it can involve some deficiencies in the nervous system that receives signals from the bladder regarding its status (when filled, the signal is perceived as the need to urinate) and also sends signals that controls the contraction of the bladder in order to release the stored urine when it is necessary. The mechanism used by the bladder is protective because when it is filled, the pressure inside and the tension in the wall increase. The bladder could break if the pressure is not released. 5 There are different types of incontinence; this project is targeted to the neurologic stress incontinence caused by detrusor over-activity in certain diseases such as: Parkinson’s disease, diabetes mellitus, spina bifida, multiple sclerosis, spinal cord injury, cerebrovascular disease, pelvic surgery, trauma, etc [28]; but it could also be applied to non-neurological stress incontinence. Stress incontinence refers to the unintentional leakage of urine due to sudden increases in abdominal pressure or unintentional detrusor muscle contractions. 2.2 Electronics Review Saline solution is a mixture of water and salt (NaCl - Sodium chloride). Both elements of the NaCl compound can conduct electrical current but as any conductor it will have a certain resistance opposing the free flow of electrons passing through it. A silicone tube filled with saline, as any conductive or semi-conductive material, used as a wire will have a resistance opposing the electrical current according to the formula 2.1 [29]: 𝑙 R= ρ𝐴 Formula 2.1. Where ρ = resistivity of the saline solution; 𝑙 = length of the tube; 𝐴 = cross-sectional area of the tube In case of a deformation, i.e. when the tube is stretched, the length of the tube and the cross-sectional area will change and will modify the resistance of the tube. If the tube is placed around the bladder, the expansion or contraction of the bladder will cause deformation of the tube. Therefore, the changes in the shape and size of the tube will be reflected on the value of its resistance, so the resistance would be a direct measurement of the size of the bladder, that way the sensor is created. Nerve could then be stimulated as needed once the information regarding the size of the bladder is obtained. 6 Chapter 3 Passive Electronics circuit development 3.1 Passive Electronics Circuit Theory Once established that the output of the sensor is a resistance value, it is necessary to define how to use that resistance given by the tube. Looking for simplicity, initially the implant was thought to be created using only passive electronic components (resistors, capacitors and coils) powered from the outside using electromagnetic transfer of energy to reduce complexity and cost. The problem inherent to this approach is the small energy that can be transmitted from the implant to be read outside the body. 3.1.1 Two pendulums transfer of energy There is a very popular physics demonstration that involves two pendulums connected by a string. The two pendulums are initially at rest until there is a stimulus on one of the coils, this energy causes the stimulated pendulum to oscillate at its maximum amplitude until the energy starts being transferred through the string to the other coil, there is then a constant energy transfer from one pendulum to another with a rhythmic pattern causing one pendulum to be oscillating at its maximum amplitude while the other pendulum is at rest, after a time, depending on the length and tension of the string, the oscillation pattern is inverted. The energy causing the oscillations is conserved in the system over a long period of time. In order to solve this energy problem it was thought of creating the electrical equivalence of this physics experiment so the energy that reaches the implant would not be lost immediately but it would be transferred from “pendulum to pendulum” and the way of this transfer would be determined by the resistance between the pendulums. 7 Figure 3.1. The physics experiment consists in two pendulums and a single impulse in any of them. At the beginning, only one pendulum will be oscillating, and then the energy of the oscillation will be transferred to the other pendulum entirely, making this other pendulum oscillate at its maximum while the other stays still. 3.1.2 Two pendulums electrical equivalence Because it is required to have two “pendulums” to have energy transfer between them, for the electrical equivalence, it was logical to have two circuits that can oscillate. The oscillation circuits are LC circuits resonant at the same frequency connected through a resistance; as the resistance will determine the way that the energy is transferred, the sensor can be placed between the resonant circuits. The proposed circuit is shown in Figure 3.2, both LC circuits resonate at a selected frequency of 1 MHz; this is achieved by matching the impedances of the coil and the capacitor at that particular frequency. ? Figure 3.2. This is the proposed electrical equivalent circuit to the two pendulums demonstration. 8 In the electrical circuit as in the two pendulums demonstration, the expected transfer of energy is shown in Figure 3.3, the pattern should then be repeated with decreased amplitude following an exponential decay. Figure 3.3. This is the transfer of energy between the pendulums and the expected behaviour of the two resonating circuits. For the circuit, a couple of coils were built and connected through different values of resistances as shown in Figure 3.4, and a third coil connected to a pulse generator circuit was used for the stimulation of one of the coils as shown in Figure 3.5. Figure 3.4. Complete schematic for the proposed electrical equivalent to the two pendulums experiment. The left part is the pulse generation for the stimuli; the right part represents the two resonant circuits coupled by a variable resistance. 9 3.1.3 Electromagnetic coupling requirements The technical requirements for the circuit to work were the two LC circuits of the implant resonating at the same frequency and a pulse that excites the circuits. The pulse has to be set to match the frequency of the resonating LC circuits or the circuits will not resonate; this is achieved by creating a pulse o f a width or time constant equals to the inverse of the required frequency since the pulse width is measured in time domain, this relation is expressed as (Horowitz et al): 1 T=𝑓 Where T = time constant and f = frequency. Since the implant will be placed behind the skin, a variable layer of fat and the anterior-muscle wall, the other very important requirement is a large communication distance between the implant and the processing unit coils, at least 5cm. In order to create a big electromagnetic field and have communication between the inside and outside coils at a wide range of separation distances, and for the coils to be very selective to resonate at a specific frequency, the coils need to have a big Q or quality factor, the Q of the coil depends on the frequency (f), the inductance (L) and inversely to the resistance of the coil (R) according to the formula [30]: Q= 𝜔𝐿 𝑅 Formula 3.1. Where ω = 2πf, and R = resistance of the coil. The inductance is given by the formula [31]: L= 𝜇 𝑜 K 𝑁2 A 𝑙 Formula 3.2. Where 𝜇𝑜 = permeability of free space; K = Nagaoka coefficient; N = number of turns; A = cross-sectional area of the coil; l = length of the coil. So at a given frequency and for a cylindrical coil if a big quality factor is desired, it is necessary to have a considerable number of turns, cross-sectional area and/or the length of the coil, this is a limitation for the size of the communication channel. 3.2 Passive Electronics Circuit Experiment 3.2.1 Two pendulums experiment The coils were built with 10 turns over a cross-sectional area of 19 𝑐𝑚2 to achieve: Coil 1 Coil 2 Q1 = 89 Q2 = 85 R1 = 6.3 kΩ R2 = 5.7 kΩ Z1 = 70.22 Ω Z2 = 67.5 Ω L1 = 11.17 uH L2 = 10.7 uH Table 3.1. Coils characteristics. 10 In order to create a resonant circuit, a capacitor that matches the impedance of the coil at the selected frequency is required, so the values of the capacitors were found using the formula [32]: 1 C = 𝜔𝑋𝑐 Formula 3.3. Where Xc = Reactance of the capacitor and is equivalent to the impedance (Z) of the inductor. The values for the capacitors were: C1 = 2.26nF and C2 = 2.35nF Figure 3.5. This is the proposed circuit in reality. The resonant coils are the ones mounted in green plastic to achieve more durability and consistence of the values for the coils’ characteristics. Careful handling of the coils is necessary in order to keep their initial characteristics since the wire tends to “uncoil” itself and gets lose. A way to maintain the coil in optimal status is to leave them mounted in a support as shown in Figure 3.5, in this case plastic. The results obtained from the proposed two pendulums equivalent circuit were not as expected since energy is lost before a second cycle as shown in Figure 3.6. 11 Figure 3.6. The waveform above represents the resonating circuit that receives the impulse. The waveform below is the second resonating circuit. It is important to note the scale at which the image was taken: 50mV for the top waveform and 20mV for the one on the bottom, this values would be enough if the process unit was measuring directly in the implant, but as the signal must be detected in the outside of the body, the measurement of these signals is impossible. Since the transfer of energy between the resonant circuits did not match the requirements with the simple design of two resonant circuits coupled by a resistance, an alternative was tried placing a capacitor to couple the resonant circuits instead of the variable resistance, the results for the waveform of the transfer of energy were closer to the expected, having a second increase of amplitude in the stimulated resonant circuit as shown in Figure 3.7. The output was still not high enough and the energy transfer was as expeted, therefore this approach was also not suitable for being used for the implant circuit. Figure 3.7. Waveforms for the transfer of energy between the resonant circuits coupled by a capacitor after a impulse stimuli. The waveform at the bottom is the output from the resonant circuit receiving the stimuli. The waveform at the top belongs to the resonant circuit that was not stimulated from the outside. 12 At this point it had been proven that the proposed circuit had an output waveform similar to the expected but also that such approach needed to be modified to have a measurement of the bladder size outside the body. 3.2.2 RLC passive implant experiment As the energy was lost almost immediately after the pulse, it was considered to be unnecessary to have two resonant circuits so one of the resonant circuits was removed and the variable resistance was placed in parallel with the LC resonant circuit of the implant. Figure 3.8. RLC resonant circuit with a variable resistance to modify the response of the circuit proposed for an alternative circuit implant. The impulse generation circuit designed for the outside of the body remained unchanged. The results appeared to be useful for the project since the value of the resistance placed in parallel with the resonant LC circuit modifies the response of the circuit in a very distinctive way. This meant that it was possible to know the value of the resistance by processing the amplitude and the frequency changes of the waveform generated by the implant as shown in figure 3.9. 13 a) b) c) d) Figure 3.9. Changes in response of the RLC resonant circuit placed in parallel with different resistor values. a) 1kΩ; b) 2kΩ; c) 3kΩ; d) 4kΩ.. The waveforms are measured with the oscilloscope at the nodes of the implant. 3.2.3 Detection of signals outside the body The results shown in figure 3.9 were obtained by measuring the energy resonating directly on the nodes of the implant circuit but it is required to have a signal from the implant reaching the outside the body detected using an external coil. 3.2.3.1 Sensitivity improvement by increasing Electromagnetic Field The problem remained the same, the readout of the signal coming out from the implant was impossible to be detected after a couple of centimetres of separation because the energy is too low. To improve the sensitivity of the reception, a few modifications were made: An additional transistor was used to increase the input pulse power on the outside coil to create a greater electromagnetic field. Switches were added to isolate the coil from any noise coming from the pulse generator so the circuit was more sensitive to receive the signal generated by the implant. The modified circuit is shown in figure 3.10. 14 Figure 3.10. Modified circuit used to increase the current flowing through the outside coil to create a greater Electromagnetic field in order to increase the range of distances separating the implant from the outside unit. The switches were added to isolate the receiver coil and increase its sensitivity. 3.2.3.2 Sensitivity improvement by resonance No useful improvement was found by using the approach presented in section 3.2.3.1 and it was decided to try forcing the outside coil to resonate at the same frequency as the RLC resonating circuit of the implant, the result was interesting because the interaction of the circuit produced a signal that was closer to the pendulums circuit that we were initially looking for. Although this approach was no useful for the aim of the implant, the pendulums equivalent circuit output was closer to the initially proposed circuit, so it can be established that a good two pendulums equivalence is achieved by using electromagnetic fields to couple two resonating RLC circuits. 15 Figure 3.11. This image is produced when both the inside and outside coils resonate at the same frequency. The waveform at the top represents outside coil that produces the impulse. The waveform at the bottom is the resonating circuit of the implant. So the initially expected waveform was obtained but the problem with the separation of the coils was still present. At this point, 3cm separation between coils was the maximum distance achieved; this was not enough for the purposes of the implant. A new problem was introduced with this approach: the amplitude and the frequency were varying with the separation of the coils, this is not desirable since the only variation source the project needs is from the bladder via the variable resistance. This turned out to be very inconvenient so the decision was to go back to the approach that gave out the best results: one resonant LC circuit in parallel with the variable resistance and a pulse generation as shown in figure 3.8. 3.2.3.3 RLC signal readout outside the body The output shown in Figure 3.12 corresponds to the implant circuit response in blue and the transmitter/receiver coil in the outside circuit. It can be noticed the big impulse in the orange waveform followed by a decay due to the inductance of the coil and controlled by the diode, during this period, the coil is “blind” to any signal produced by the implant circuit, this can be noticed at the figure looking at the first 3μs being ignored. After the fist 3μs the waveform of the outside circuit, represented in orange, follows the shape of the implant circuit response, represented in blue. From the output of the coils, it can be further noticed the high frequency oscillations on the outside coil caused by the capacitance of the circuit causing resonance at the frequency determined by the inherent characteristics of the coil. 16 Figure 3.12. Output waveforms when using one resonant circuit for the implant and one transmitter/receiver coil. The response from the outside coil is plotted in orange and the resonance measured at the implant RLC circuit is shown in blue. 3.2.3.4 Improving the RLC signal readout outside the body There are two possible solutions to improve the readout of the out-coming signal: 1. Create a low-pass filter that eliminates the high frequency oscillations from the receiver coil. 2. Create separate coils for transmitting pulse to the implant circuit and receiving the signal coming out of it. Both solutions were suitable but difficult to implement. However, the second was chosen since the receiver coil is able to sense any incoming signal even when the transmission of the pulse is taking place. For the first solution, even if the high frequency oscillations could be eliminated there would be a loss in data for approximately 3μs, which contain the biggest amplitude of the signal from the implant circuit. The requirement for this idea to work is to have the two coils one right next to the other without causing any type of coupling between them. This is achieved by changing the shape of the coils to change the paths that the current follows in respect to each other to create different electromagnetic fields for each coil and reduce the coupling coefficient between them. The required shape and the current flows are shown in Figure 3.13 [33]. 17 Figure 3.13. Shape and positioning of coils to reduce the coupling coefficient between them: coil 1 is shown in red with its respective current flow path; coil 2 is represented in black with its respective current flow. In reality, the arrangement of coils had 3 layers, from the surface to the centre: 1. Copper wire forming the coils. 2. PVC plastic tube for support of the coils, one piece per coil. 3. Glass fibre for the PVC to be mounted on, this permits each of the PVC parts to rotate to find the angle between coils that can reduce the coupling to the maximum. Besides having inductive coupling, the coils have capacitive coupling due to the wires, this problem is reduced by using an aluminium ring between the coils connected to earth as shown in figure 3.14, so capacitive coupling can be “captured” and taken away. 18 Figure 3.14. Two coils were used. To reduce the coupling inductance between them, the coils were built in the shape shown in figure 13 and figure 14, and an aluminium ring was added between the coils to reduce the capacitive coupling. The coupling coefficient between the coils could not be eliminated so the pulses from the transmitting coil produced resonance on the receiving coil; this can be considered noise and could not be eliminated, just reduced. The reduction was not enough for reading the output signals from the implant. Figure 3.15. The input pulse of the transmitting coil in the outside is the wave on the top. On the bottom the noise that the reading coil receives only from the transmission coil can be observed, the noise is too big for the signal we are trying to receive from the implant. The main problem that appears when using passive electronics is that the energy of the signal is not enough to travel the desired distance to the implant and back from it. At that point, it had been proved that the use of passive electronics was not suitable for the type of implant that the project required. 19 Chapter 4 Active Electronics circuit development 4.1 Active Electronics Circuit Theory An alternative approach using active electronics powered by the outside circuit using electromagnetic coupling was then applied. The implant circuit is passive the majority of the time, receiving energy to power the electronics in order to generate pulses at different pulse repetition frequencies, these pulses will short-circuit the coil, modifying the electromagnetic coupling of the coils and giving an amplification on the outside coil waveform. The period or repetition frequency of the pulse is generated by an oscillator circuit in which the value of the resistance is the silicone tube sensor and a RC filter. The repetition frequency of the pulse will depend on the size of the bladder. Figure 4.1. Schematic of the new approach for the project using active electronics in the implant circuit, powered by electromagnetic coupling. The repetition frequency will vary as the circumference of the bladder varies. In order to power the implant, it is necessary to have a signal generator that will pass current through the coil in a very specific manner so an electromagnetic link can be created between the coils of the circuit outside the body and the implant circuit. 20 4.2 Active Electronics Circuit Experiment Figure 4.2. The implant circuit on the middle, the power generator and signal processing circuit on the bottom. The variable resistance made of a silicone tube filled with saline is at the top. 21 4.2.1 Design of the active implant For the final design of the implant, the active electronics used include one integrated circuit hex inverter that contains 6 inverter gates, one voltage regulator and one power transistor; the rest of the circuit is composed by passive electronics: resistances, diodes, capacitors and one coil. Figure 4.3. Final design of the implant circuit. AC voltage is rectified by D2 and C3 and controlled by the Vreg that powers the inverters. The square wave source is generated by the two inverters in the left with R1, Rvar and C1, this circuit controls also the period or pulse repetition frequency. The pulse width is controlled by R2 and C4. The short circuit is managed by transistor M1. 4.2.2 Operation of the active implant The function of this circuit is to produce pulses of variable repetition frequency controlled by the sensor and it includes 2 main phases: 1. Power generation from the outside signals. 2. Pulse generation For the first phase, a sinusoidal power signal at the selected resonating frequency is received and produces an AC power signal. The AC power signal is rectified with the use of a diode and a capacitor so it is converted into a variable DC voltage source that is controlled by the voltage regulator so it cannot exceed the maximum voltage supported by the inverter. For the second phase an AC must be used to go through the sensor, an AC circuit must then be implemented to prevent electrolysis in the cells and tissues that are in contact with the variable resistor, this is achieved by two inverters connected with two resistances and one capacitor act as a square wave generator, this square wave is used to control the period of the pulses with a frequency f = 1 / RC [34] using a capacitor, a fixed 1M resistance and the variable resistance, the signal is the passed through an RC filter to eliminate noise and create only clean positive impulses that go from 0v to a maximum voltage determined by the output voltage of the voltage regulator. The pulses will drive the transistor to short circuit the capacitor and most importantly, the coil; this is what changes the coupling between the coils and gives useful data to analyze. 22 Figure 4.4. Pulse generated by the implant. 4.2.3 Design of the external circuit The external circuit is more complicated than the implant’s, it includes a signal generation stage to produce an AC power for the implant using a coil and a pair of capacitors and a signal processing stage including rectification, signal’s DC component removal and a comparator. Figure 4.5. The complete power transmission and signal processing unit. The impulse generation is the part on the left of the coil L1. The signal processing begins in the node connecting C1 and C2. The rectification of the signal is made by the diodes D1 and D2, resistance R1 and capacitor C3. Capacitor C4 eliminates the DC component of the signal. The OPAMP functions as a voltage comparator of the signal versus a reference voltage that can be modified to change the sensitivity and range of the electromagnetic coupling. 4.2.3.1 Power generation and power transmission to the implant The power signal is generated using a square wave source oscillating at a frequency equal to 1 MHz, this signal is connected to a hex inverter and a pair transistors, one P-type and one N-type to increase the 23 current and drive the coil. The LC resonant circuit consumes a very high current, up to 300mA are consumed by the whole power circuit when resonance is achieved by setting the right frequency at the signal generator source; this current consumption can be observed in figure 4.6 by looking at the peak valleys (1, 2) in what would be a square wave if the LC circuit was not present or resonating, the current drawn affects the transistors and the shape and the size of the valleys depend on the power delivered by the pair of transistors, the top peak (1) is controlled by the P-type and the bottom valley (2) depends on the N-type transistor. Ideally, the valleys on the peaks should be as small as possible, more than one transistor can be used to increase the power output, they have to be the same type and be connected in parallel. The depressions are hints of the resonance of the coils, if the frequency is the correct one, the two peaks on the sides of the depression (3 & 4, 5 & 6) will be the same size, if one is significantly bigger than the other, and the frequency has to be corrected. Figure 4.6. Square wave with depressions on the peaks due to current being drawn by the LC resonant circuit. The coil is connected to a couple of capacitors for a double purpose: to force the coil to resonate and to create a voltage divider. A peak voltage of 7 volts enters the coil, by the time the current exits the coil, the initial voltage is multiplied by the quality factor (Q) of the coil producing approximately 700 volts. This voltage is excessive for further analysis, so it is necessary to decrease the voltage by using the voltage divider. The coil remains resonating since two capacitors in series have the almost the same capacitance of the smaller one of them; the small capacitor is the one producing the resonance. A sinusoidal waveform is created by the effect of the coil and the capacitors driven by the input square wave from the signal generator. This sinusoidal is the pulse that will power implant circuit. 24 Figure 4.7. Sinusoidal waveform created by the LC resonant circuit that is used to power up the implant. 4.2.3.2 Signal detection and signal processing outside the body As long as the implant circuit is receiving power passively, the electromagnetic coupling of the coils will remain unchanged and the sinusoidal will be a stable input to the signal processing part of the project. When the implant circuit modifies the coupling, the sinusoidal will be altered producing a change in amplitude. Figure 4.8. Coupling between coils being modified by a pulse that short-circuits the implant coil. The bottom waveform shows the pulse that causes the short circuit of the LC implant circuit. The top waveform is obtained at the voltage divider formed by the capacitors and it is the input to the signal processing stage. When the valuable information appears as a change of amplitude in a signal it is commonly known as an amplitude modulated signal and it is processed by a rectification phase, followed by the removal of the DC component and finally a voltage comparator, all this is made so by the end of the process, a neat zero voltage line with a chosen voltage peak is obtained; the peaks appear when the coupling between the coils 25 changes. The frequency at which each coupling change occurs is linearly proportional to the size and shape of the sensor, which is controlled by the size of the bladder. Figure 4.9. Changes in the frequencies of the pulses as the value of the tube is stretched provoking changes in the values of the sensor’s resistance. A frequency to voltage can be added to be compared with a selected threshold to let the patient know that it is necessary for him to empty his bladder. A LED or beeping is a simple and reliable solution. 26 Chapter 5 Sensor development 5.1 Sensor theory The bladder is a flexible reservoir that expands or contracts changing its volume and its circumference depending on the amount of urine it contains. In the storage phase, the bladder will be expanded as more urine is passed to it from the urethers changing in size, as represented in Figure 5.1 section a) the size of the bladder will increase, stretching the silicone tube and therefore increasing the length and reducing the cross-sectional area of the tube, this modifies the value of the electrical resistance of the tube represented in section b). Figure 5.1. a) The bladder expands with time due to the volume of liquid contained inside; b) the shape of the silicone tube sensor will change in Length and Area changing the value of the resistance. The bladder can take different shapes but it can be considered as a spherical shape so, as the volume of urine contained within the bladder increases, the circumference of the bladder will increase, if we implant the tube around the bladder, the tube will have approximately the same value as the circumference of the bladder, this relation will be maintained in different proportions that can be calibrated for each patient. The spherical shape is represented in figure 5.2, where the change in volume stored in the bladder is plotted against the length of the tube. 27 Bladder Volume vs Tube Length 1200 1000 800 Bladder Volume (cm^3) 600 400 200 0 15 20 25 30 35 40 Tube Length (cm) Figure 5.2. Change of the length of the tube as the volume of the bladder increases. Bladder is considered as a sphere. The Formula 2.1 expresses the relationship between electrical resistance and the shape of a partially conductive material. For the type of sensor that will be used for this project, the length and the area will be determined by the silicone tube that adapts the better to the human anatomy without interfering with the normal physiology of the body and also on the size of the bladder, the resistivity of the material indicates how much resistance the material will put against the flow of current. The Formula 2.1 can be used to calculate the expected values from the changes in the Area and Length of the tube as the bladder volume changes and therefore the resistance value in the implant circuit. The expected results are displayed in Table 5.1. A (cm2) L (cm) Bladder Volume (cm^3) Resistance (Ohms) 0.0145 38.97 1000 400,951 0.0151 37.63 900 373,754 0.0157 36.18 800 345,529 0.0164 34.60 700 316,099 0.0172 32.87 600 285,228 0.0183 30.93 500 252,583 0.0197 28.71 400 217,669 0.0217 26.09 300 179,682 0.0249 22.79 200 137,123 0.0314 18.09 100 86,382 Table 3.1. Expected values for the bladder and the sensor as the size of the bladder changes. 28 Therefore: the value of the resistance will vary according to the size of the bladder; this is the aim of the sensor. 5.2 Sensor Experiment 5.2.1 Operation of the sensor The variable resistance controls the frequency at which the pulses are sent to drive the transistor to alter the electromagnetic coupling between the implant and the outside circuit. The time constant is determined by the product of the values of the resistance and the capacitor according to the relation [35]: T = RC Where: T = time constant, R = resistance value and C = capacitance value 5.2.2 Location of the sensor in the implant circuit The time constant can control the duration of the pulse if it is placed on the RC pulse generation section of the implant but the time constant is in the order of ms and the changes of the resistance over the pulse width are very small compared with the changes that the variable resistance can produce on the period, the pulse repetition frequency. If the resistance is placed on the oscillation signal generation, the resistance will control the time at which the repetition pulses will appear; the time elapsed between one pulse and the next is the inverse of the frequency. After the signal generation, we still have a pulse generation controlled by a constant RC circuit that filters the signal from any undesired random noise. 5.2.3 Finding the optimal resistance value The circuit was tested using different values of resistances and it was found that the expected values were inconveniently big because the low repetition frequency allowed the appearance of a source of noise at a frequency higher than the frequency of the repetition of the pulses (Figure 5.3). In order for the circuit to discriminate the noise, the sensitivity of the system could have been reduced, reducing the communication range between coils as well but, if the value of the resistance is decreased, the pulse repetition frequency will be higher than the noise frequency and it will be overridden by the legitimate pulses. 29 Figure 5.3. In the image at the left, an unidentified source of noise appears at low frequencies. The problem is solved when the frequency is increased by decreasing the resistance values of the sensor. The decrease of resistance for the silicone tube filled with saline, according to Formula 2.1, can be achieved by increasing the cross-sectional area, reducing the length of the tube or reducing the resistivity of the material. The length of the tube cannot be changed because it depends on the circumference of the bladder; the cross-sectional area of the tube needs to remain small since it will be implanted around the bladder and it must be comfortable and interfere as little as possible with the normal body functioning. The way that the resistance value of the sensor was chosen was by modifying the saline solution; the electrical current travels through the tube using the metals of the salt, if the amount of salt is increased, the resistivity is decreased and the resistance of the sensor is then decreased proportionally. The principle of the resistance change depending on the stretch remains unchanged so the length and cross-sectional area modifications will still be proportional to the resistance after the value of the resistance of the tube is decreased. The initial saline solution was prepared using 9grms of salt per Litre of water; using careful experimentation, the salinity was increased using an exponential function beginning with steps of 1gr of salt each and finishing with steps of 20grs aiming at a resistance with a value of approximately 5kΩ. The final solution contained approximately 120grs of table salt per Litre of water. It is very difficult to create a mix of salt and water with the exact resistivity value, so it was decided that 7.01kΩ can be considered good enough for the initial value of the resistance. 30 Figure 5.4. The measurement of the length, resistance and impedance values of the sensor. The impedance and resistance values are the same as expected from a resistance with no capacitive or inductive properties. 5.2.4 Sensor characteristics The resistance created has the following initial characteristics: Length = 21 cm Radius = 1 mm or .1cm Area = 𝜋𝑟 2 = 0.031415927 cm Volume = A*L = 0.659734457 The volume of saline solution will remain constant within the tube regardless of the changes caused by the bladder; this, added to the obtained resistance of the unchanged tube permits the calculation of the resistivity of the saline solution, calculate the bladder volume contents and estimate values for the changes of length and area of the sensor when it is stretched. The length of the tube is considered to be equal to the bladder circumference. The results are shown in table 5.2. 31 Tube Area (cm^2) 0.031 0.030 0.029 0.027 0.026 0.025 0.024 0.024 0.023 0.022 Tube Length (cm) 21.000 22.000 23.000 24.000 25.000 26.000 27.000 28.000 29.000 30.000 Bladder Volume (cm^3) 156.389 179.811 205.462 233.444 263.857 296.804 332.384 370.700 411.854 455.945 Expected Resistance (kΩ) 7.01 7.70 8.42 9.16 9.94 10.76 11.60 12.48 13.38 14.32 Measured Resistance (kΩ) 7.01 7.85 8.55 9.35 10.16 11.01 11.87 12.79 13.71 14.67 Table 5.2. Changes in the characteristics of the sensor as it is stretched. Expected bladder volume is also considered. The most relevant characteristics changes from table 5.2 are plotted in Figure 5.5 and 5.6 where it can be noticed that the expected values are similar enough to the measured one. Resistance vs Tube Length 15 14 13 12 Resistance 11 Value (kΩ) 10 9 8 7 Expected Resistance (kΩ) Measured Resistance (kΩ) 20 25 30 Tube Lenght = Bladder Circumference (cm) Figure 5.5. The change in the expected and the measured resistance values of the sensor is plotted in respect of the change of the tube length. 32 Resistance vs Bladder Volume 15 14 13 12 Resistance 11 Value (kΩ) 10 9 8 7 Expected Resistance (kΩ) Measured Resistance (kΩ) 150 200 250 300 350 400 450 500 Bladder Volume (cm^3) Graph 5.6. The change in the expected and the measured resistance values of the sensor is plotted in respect of the change of the expected bladder volume. The graphs show very helpful information because it proves the theory that there is a linear relation between the tube, the resistance changes and more importantly the expected bladder size. The sensor works properly. 33 Chapter 6 Performance Measurements Typical Performance Characteristics Frequency Response vs Tube Length 6 5.5 5 4.5 Frequency 4 (kHz) 3.5 3 2.5 2 20 21 22 23 24 25 26 27 28 29 30 Length of Sensor (Cm) Figure 6.1. Frequency dependence on tube length at room temperature. The value of the resistance was measured by stretching the sensor linearly and measuring its resistance using an impedance analyzer at 10kHz; the values of the resistance were substituted on the actual circuit to obtain the frequency response measured using an oscilloscope. Frequency Response vs Resistance 25 20 15 Frequency (kHz) 10 5 0 0 1 2 3 4 5 6 7 8 9 10 Resistance KΩ Figure 6.2. Frequency dependence on resistance value changes at room temperature. A variable resistance box was used to input different resistance values to the actual circuit; the frequency response was obtained from the circuit was measured using an oscilloscope. 34 Frequency Response vs Temperature 11 10 9 Frequency (kHz) 8 7 6 5 20 25 30 35 40 45 50 55 60 Temperature (°C) Figure 6.3. Frequency dependence on temperature. The resistance value was heated using a boiler and measured using an impedance analyzer at 10kHz; the resistance value was placed actual implant circuit and the frequency was measured using an oscilloscope. Frequency Response vs Coil Spacing 8 7 6 5 Frequency 4 (kHz) 3 2 1 0 2 3 4 5 6 7 8 9 10 Spacing (cm) Figure 6.4. Frequency dependence on coil-coil spacing (coupling coefficient) with a resistance with a value of 5 kΩ to avoid changes in response due to temperature or position of the real sensor; 35 Resistance Changes per Day 6.4 6.38 6.36 6.34 Resistance 6.32 KΩ 6.3 6.28 6.26 6.24 0 1 2 3 4 5 6 Day Figure 6.5. Resistance value change per day stored in isotonic saline measured using an impedance analyzer at 10kHz at room temperature. The position of the resistance could not be the same for all measurements so values of the resistance vary with slight changes of positions of the sensor and temperature of the room. Electrical Characteristics Parameter Min. Typ. Max. Unit Supply Voltage 6 7 9 V Current Consumption (External Unit) 180 220 410 mA Current Consumption (Implant) .1 5.3 8.3 mA Output Frequency 781.3 7.57k 23.15k Hz Sensor Resistance 1 5 – 10 60 kΩ Frequency dependence on power supply voltage No change within recommended limits 36 Chapter 7 Discussion One of the main problems when trying to solve or decrease neurological stress incontinence in patients is the lack of constant real-time information regarding the size of the bladder. Several attempts have been made to estimate the size of the bladder using non-invasive methods but the results are not accurate enough. Some implants have been successful at giving approximations for the bladder size but they are overcomplicated and expensive. The relative short range of electromagnetic coupling between coils is enough for the type of implant required and it is very reliable since it is not sensitive to interference from other radio-frequency sources providing a simple and non-expensive way of transmitting signals between two separate circuits. The frequency response of the implant to different values of resistance determined by the length of the sensor decays for increasing lengths in a linear manner (fig. 6.1) in which, the values of frequency can be validly correlated to the size of the bladder. Figure 6.2 shows that the frequency varies exponentially with a linear variation of the resistance, this can be useful in further calculations. The response in frequency is steady for a range of coil-to-coil separation distances from 2 to 8.5 cm (fig. 6.4), this is necessary because the distance may vary with changes of position of the patient, respiration and body weight changes and it will not affect the output. The temperature changes show the major effect in response of the implant (fig. 6.3), in the worst case, more than 1 kHz change occurs per 5 degree Celsius modification, this is equivalent to an error of approximately 50cm^3 in the final bladder volume reading. The resistance value changes considerably from day to day stored in isotonic saline (fig. 6.5) showing a random behaviour with a maximum change of up to 0.13kΩ; if the resistance is stored in isotonic saline, the concentration of the solution giving the resistance will not change and therefore the changes from day to day can be attributed to room temperature changes and the position at which the measurement was performed. It is important to notice that the internal body temperature remains very stable and once the sensor is placed around the bladder there will be no small displacements that modify its output so the value of the resistance is expected to be very stable and accurate once implanted. Reliability, simplicity and cost-effectiveness are three characteristics that the present biomedical challenges require. A silicone tube filled with saline has no harmful effect on the body and when added to externally powered electronics, it creates an implant that can remain safely inside the body for a prolonged period of time. 37 Chapter 8 Conclusions and Future Work A working implant prototype aiming to monitor the size of the bladder has been created. It uses a silicone tube filled with saline surrounding the bladder so it can be stretched as the bladder expands during the storage of urine. The impedance of the tube is directly related to the circumference of the bladder, when it changes, it produces frequency variable pulses that are sent via an electromagnetic coupled pair of coils to the outside of the body for signal processing stage based on amplitude-modulation techniques. An electrical analogy to the two pendulums physics demonstration was found when trying to create an implant using only passive electronic components, it was further found that this is only possible for short range applications and it was not suitable for the project. For the future work, the circuits will be optimized, and some new features can be added: A frequency to voltage converter can be added to have a voltage comparison and set a volume threshold. The circuits can be decreased in size considerably by using a purpose built PCB with surface-mounting ICs and smaller resistances. The coil can also be reduced in size but the voltage would have to be increased to achieve the same distance reach for the Electromagnetic field. Once there is information regarding the current size of the bladder at any time, it is possible to add nerve stimulation to the implant so the filling sensation and the voiding sensation can be recovered. Other applications for the implant can include muscular stimulation to solve general stress incontinence problems by stimulating the bladder neck muscles according to the volume contained within the bladder so it can retain the urine stored without leaking. 38 References [1] http://en.wikipedia.org/wiki/Saline_(medicine) [2] David R. Lide (ed) 2003; Section 12, Properties of Solids; Electrical Resistivity of Pure Metals CRC Handbook of Chemistry and Physics, 84th Edition. CRC Press. Boca Raton, Florida [3] J.A. Dean (ed) 1999 Section 4, Table 4.1 Electronic Configuration and Properties of the Elements Lange's Handbook of Chemistry (15th Edition), McGraw-Hill [4] S. N. Mohapatra, Kate L. Costeloe, D. W. Hill 1977 Blood Resistivity and its Implications for the Calculation of Cardiac Output by the Thoracic Electrical Impedance Technique Intens. Care Ned. 3, 6367 [5] http://www.nhs.uk/conditions/Incontinence-urinary/Pages/Introduction.aspx [6] Teh-Wei Hu, Todd H. Wagner, Judith D. Bentkover, Kristi Leblanc, Steve Z. Zhou, Timothy Hunt 2003/2004 Costs of urinary incontinence and overactive bladder in the United States: a comparative study University of California, Berkeley [7] Tubaro, Artibani, DeLancey, Khullar, Vierhout, Gennaro, Kluivers 2005 Imaging and other investigations Committee 7B [8] D. S. Mathioulakis, A. Fidas, P. Dik, S. Tsangaris 1996 Digital image analysis as a means of determination of urodynamic parameters Med. & Biol. Eng. & Comput., 1996, 34, t81-184 [9] Andrew Simmons, Steven Williams, Michael Craggs, Christopher Andrew, Lloyd Gregory, Mark Allin, Anthony Mundy, Brian Leakers 1997 Dynamic multi-planar EPI of the urinary bladder during voiding with simultaneous detrusor pressure measurement Elsevier Science Inc. [10] Nwosu CR, Khan KS, Chien PF, 1998 Honest MRI. Is real-time ultrasonic bladder volume estimation reliable and valid? A systematic overview. Scand J Urol Nephrol. Sep;32(5):325-30. [11] G. G. Hartnell, M.R.C.P., F.R.C.R., tE. A. Kiely, F.R.C.S., Gordon Williams, F.R.C.S. and tR. N. Gibson, F.R.A.C.R. 1987 Real-time ultrasound measurement of bladder volume: a comparative study of three methods The British Journal of Radiology, 60, 1063-1065 [12] E. A. Kiely, G. G. Hartnell, R. N. Gibson, Gordon Williams 1987 Measurement of Bladder Volume by Real-time Ultrasound British Journal of Urology [13] Liu-Ing Bih, MD, Chi-Chung Ho, MD, Su- Ju Tsai, MD, Ya-Chun Lai, MD, Willy Chow, MD 1998 Bladder Shape Impact on the Accuracy of Ultrasonic Estimation of Bladder Volume Arch Phys Med Rehabil 1998;79:1553-6. [14] G. J. Poston, A. E. A. Joseph, P. R. Riddle 1983 the Accuracy of Ultrasound in the Measurement of Changes in Bladder Volume British Association of Urological Surgeons 39 [15] Robert Tan, Timothy McClure, C. K. Lin & David Jea, Foad Dabiri, Tammara Massey, Majid Sarrafzadeh, Mani Srivastava, C. D. Montemagno, Peter Schulam, Jacob Schmidt 2008 Development of a fully implantable wireless pressure monitoring system Biomed Microdevices (2009) 11:259–264 DOI 10.1007/s10544-008-9232-1 [16] J. Coosemans, R. Puers 2005 An autonomous bladder pressure monitoring system Katholieke Universiteit Leuven, Department ESAT-MICAS, Kasteelpark Arenberg 10, B-3001 Leuven, Belgium [17] Philippe Jourand, Robert Puers 2009 An Autonomous, Capacitive Sensor Based and Battery Powered Internal Bladder Pressure Monitoring System Katholieke Universiteit Leuven, ESAT-MICAS, Kasteelpark Arenberg 10, B-3001 Leuven, Belgium [18] P. Jourand, R. Puers 2009 Belgian day on biomedical engineering developments on bladder pressure measurement systems Katholieke Universiteit Leuven, ESAT-MICAS, Belgium [19] Margot S. Damaser 1999 Whole Bladder Mechanics during Filling Scand J Urol Nephrol Suppl 201: 51–58 [20] Christopher R Chapple, Scott A MacDiarmid, Anand Patel 2009 Urodynamics made easy Table4.2 P.59 Elsevier Churchill Livingstone [21] D. W. Gould, A. C. L. Hsieh, and L. F. Tinckler 1995 The effect of posture on bladder pressure J Physiol. 1955 September 28; 129(3): 448–453. [22] Sumitra Rajagopalan, Mohamad Sawan, Ebrahim Ghafar-Zadeh, Oumarou Savadogo, Vamsy P. Chodavarapu 2008 A Polypyrrole-based Strain Sensor Dedicated to measure Bladder Volume in Patients with Urinary Dysfunction Sensors 2008, 8, 5081-5095; DOI: 10.3390/s8085081 [23] Frederic H. Martini, William C. Ober, Claire W. Garrison, Kathleen Welch, Ralph T. Hutchings 2006 Fundamentals of anatomy and physiology The urinary bladder P.984Pearson [24] Patrick C. Walsh, Alan B. Retik, E. DarracottVaughan, Alan J. Wein 2002 Campbell’s Urology Bladder P.58 Elsevier Science [25] D. J. Griffiths, H. J. Rollema 1979 Urine flow curves of healthy males: a mathematical model of bladder and urethal function during micturition Med. & Biol. Eng. & Comput., 17, 291-300 [26] John M. Fitzpatrick, Robert j. Krane 1995 The Bladder Bladder Overdistension P.80 Churchill Livingstone [27] MDDiana D. Cardenas, MDThomas M. Hooton 1994 Urinary tract infection in persons with spinal cord injury Archives of Physical Medicine and RehabilitationVolume 76, Issue 3, March 1995, Pages 272-280 [28] Pat D. O’Donnell 1997 Urinary Incontinence Incontinence Caused by Neurologic Disease P. 338347 Mosby [29] William D. Callister Jr, David G. Rethwisch 2008Fundamentals of Materials Science and Engineering Electrical Properties of Materials F12.2 P461 John Wiley & Sons 40 [30] http://en.wikipedia.org/wiki/Inductor [31] Nagaoka, Hantaro 1909. The Inductance Coefficients of Solenoids. 27. Journal of the College of Science, Imperial University, Tokyo, Japan. p. 18. [32] John Bird 2003Electrical Circuit Theory and Technology P.214 Newnes [33] N. de N. Donaldson 1978 Morphognostic coils: a technique for transmitting several nearfield radio signals through the same space Medical and Biological Engineering and Computing Volume 17, Number 2 [34] Paul Horowitz, Winfield Hill 1989 The art of electronics Relaxation Oscillators P.285 Cambridge University Press [35] Bernard Grob1997 Basic Electronics RC and L/R Time Constants F23-2 P.636 Mc Grw-Hill Personal Contact Details Jorge Chacon Caldera E-mail: Jorge.caldera.09@ucl.ac.uk Permanent address: Rosario Castellanos #6119. Colonia Lomas Universidad. Zapopan, Jalisco. 45016. México. Mobile number: +44 (0) 7935992528 Home number: +53 (33) 31106222 41