Demonstration of Frequency Regulation by Free Grid System
advertisement

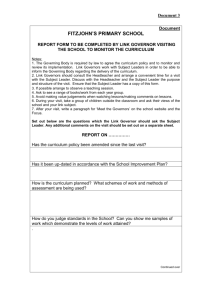
International Journal of Engineering Trends and Technology (IJETT) - Volume4Issue5- May 2013 Demonstration of Frequency Regulation by Free Governor Mode of Operation in Western Region Grid System Namrata Tiwari1, Vijay Bhuria2 1 post Graduate student,2Assistant professor Department of Electrical Engineering, Madhav Institute of Technology & Science, Gwalior (M.P.), India Abstract— The electric power system must deal with two unique requirements: the need to maintain a near real-time balance between generation and load, and the need to adjust generation (or load) to manage power flows through individual transmission facilities. Frequency regulation is one of the distribution services to be supplied by the electricity market participants. Frequency regulation is to maintaining the balance between demand and supply in real time. In this paper determine the stability of western region grid through Frequency Regulation by Free Governor Mode of Operation. Matlab and Simulink model are proposed to use the design concept and operation of the model. A simple model of a speed governing system of the steam turbine is taken for exhibit the dynamic simulation. Keywords— FGMO, frequency regulation, speed governor, drooping. I. INTRODUCTION Frequency regulation is one of the most vital system reliability services that must be provided by market participants and managed by the system operator (SO). The inequality between load and generation due to contingencies or large difference of load causes variation in frequency and it is required to maintain the frequency within the normal operating band (NOB) as arranged by the reliability requirement of different countries or regions. To maintain or bring back the frequency within the NOB, different approaches have been adopted by different countries or regions by their SOs. Frequency regulation can be achieved by balancing mechanisms either by some regulatory approach or through some market based approach. The main objective of all these methods is to bring back and maintain the frequency within the NOB as soon as possible. [8] In case of Indian power industry scenario, All the regional constituents would make all possible efforts to ensure the maintenance of grid frequency ISSN: 2231-5381 within the normal IEGC band that is 49.5 to 50.2 Hz. Emergency unloading of a unit is available only when frequency reaches 50.2 Hz. As a consequence excursions in frequency are common up to 1 Hz in a time block of 15 minutes. [13] For the sake of better control efforts are being made to enable the frequency governors to respond to entire range of frequency. It is called free governor mode of operation (FGMO). Variation in grid frequency can be minimized by putting all the generating stations on “free governor” mode of operation. [4] Western region load dispatch centre (WRLDC) grid covers the power system of the states of Madhya Pradesh, Chhattisgarh, Maharashtra, Gujarat and the Union Territories of Daman & Diu, Goa, Dadra and Nagar Haveli; [1] the Central Generating Companies such as National Thermal Power Plant Ltd., NPCIL and Joint Venture companies and several Independent Power Producers (IPPs) whose generating stations connected to the Western grid including all above functions. The Western region electricity grid which is a part of the synchronous ‘NEW’ grid formed after synchronization of Northern grid with Central grid on 26th August 2006 covering area of 951.488 sq. kms and population of 273 Million covers nearly 30% of the country’s area and population. It has the highest installed capacity of 64394 MW which is 32% of total installed capacity of Indian Power system including central sector, state sector, private sector and Independent power plants and shares as on 31.03.2012. Per capita expenditure of Western Region is 1116.92 kWh. During 2011-12, 889ckt. Kms. of 765 kV, 5406 Ckt.km of 400 kV and 1667 km of 220 kV http://www.ijettjournal.org Page 2072 International Journal of Engineering Trends and Technology (IJETT) - Volume4Issue5- May 2013 transmission lines were added in Western Region Transmission System [9]. The inter connection mostly benefited Western regional grid which is importing power to the tune of MW from ER and NER grids [3]. Therefore, according to this scenario the large scale power system is divided to some distribution areas and the area system is modelled as a collection of independent generator units to supplying the area-load. In the proposed strategy one generator unit is responsible for tracking the load and hence performing the load frequency control task by securing as much transmission and generation capacity as needed. [5] II. speed / frequency will be oscillating which is an indication of poor power quality. A state of fixed system frequency and zero acceleration indicates that the generation meets the system demand. The governing system supplies for this regulation / adjustment and when the turbo-generator is on bars, by the controlling of the steam inflow to the turbine. The regulation is predicted by various control logics and by operating the control valves in the turbine. Stop valves presented in the governing system protect the turbine in case of unsafe conditions by blocking the steam flow into the turbine. [7] FREE GOVERNOR MODE OF OPERATION Free governor mode operation means that the governor is free to govern as its regulation/droop characteristics. The governing system senses this change in speed and adjusts steam control valve so that mechanical power matches with the changed load. The Governor is an important controller in the Fig.1 [7] power plant as it regulates the turbine speed and power participates in the grid frequency regulation. IV. DROOP OR REGULATION The steady state and dynamic response behaviour of the turbine is influenced mainly by the The change in frequency (Δω) can be explained characteristics of the Governing system. [7] by the using following equation in terms of change in load ( Δ Pl) and a factor R called ‘speed III. NEED FOR THE GOVERNING SYSTEM regulation or ‘droop’. The governor is a device that automatically Δω = - [Δ Pl ]( R) adjusts the rotational speed of the turbine and the A 20 % change in load (Δ Pl = 0.2 per unit) generator output. When the generator load is constant and the turbine is operated at a constant causes 1 % change in frequency (Δω = 0.01 p.u) rotational speed. However, when the load changes, with a per unit (p.u) droop value of 0.05. Similarly then the balance between the generator output and full load throw off (Δ Pl = - 1.0) causes 5 % the load is not maintained, and the rotational speed change in speed. (Δω = + 0.05). This is explained also changes. When the load is removed, the well known droop characteristic. [12] The governor detects the increase of the rotational regulation can be expressed in the form of power – speed, and then, the valve is closed rapidly so that frequency characteristic as shown in Figure 2. an abnormal speed increase of the generator.[6] The In thermal power plants droop value is generally load on the turbo-generator does not remain 4 % to 5 %. The sensitivity of the governor for a constant but vary as per the consumer (Grid) given change in load varies inversely with the demand requirements. The presence of a continuous percentage droop. The droop of hydro turbines will mismatch between the generation and the demand be around 2 to 3% where as that of the steam in a larger network results into variations in turbines will be 4 to 5%. [7] frequency and necessitates a continuous adjustment of generation at the turbo-generators. If not, the ISSN: 2231-5381 http://www.ijettjournal.org Page 2073 International Journal of Engineering Trends and Technology (IJETT) - Volume4Issue5- May 2013 Fig.2 speed regulation characteristics [7] V. FREQUENCY CONTROL BY FGMO shedding or to draw/inject Unscheduled Interchange (UI) power responding to signals generated by the commercial mechanism (ABT). [7] Under ABT mechanism, grid operating frequency narrowed down from 49.2 to 50.3 Hz to 49.5 Hz to 50.2 Hz. and limits on UI volumes below 49.7 Hz for overdrawal as well as under injection and UI rates also varied. [13] Grid disturbances over the last few years, All constituents are requested to operate maximum number of hydro units to provide operational flexibility. In order to avoid any sudden load change in the system at the time of switching on frequency response and the frequency at the start of the test period (between 10:15 to 10:30 hrs) shall be maintained close to 49.5 Hz. For this purpose, regional entities of WR are to maintain their net exchange close to the schedule. ER and NR grid being synchronously connected to WR shall also endeavour to maintain their net exchanges either WR as per their respective schedules. NLDC is requested to the coordinate with all RLDCs to ensure that all inter regional links are healthy and in service, and their power flows do not pose a constraint during the test operation. [11] Free governor mode of operation on generating units and tripping on high frequency could be avoided. During grid disturbances, load generation balance can be attained at a faster rate. [7] All generators have some type of governor control. The governor senses a change in speed and regulates the energy to be delivered to the generator’s prime mover. The change in the generator output is in response to the change in frequency and occurs in the 3-10 sec time frame. Primary response is responsible for the initial arrest of frequency variation.[10] During normal operation, tripping of a 200 MW unit leads to frequency drop of around one hertz due to low system stiffness as the frequency has to be controlled only by load damping effect in the first 20-seconds after the tripping. FGMO would increase stiffness of system significantly and avoid large frequency dips in the event of unit tripping. [7] Frequency control requires provision of primary regulation and supplementary regulation as basic requirement. Primary regulation is giving through speed governors which respond to frequency changes by varying turbine outputs. Maintaining governors free to operate in the entire frequency range enables smooth control of frequency fluctuations as well as security against grid disturbances. In India, due to wide range of frequency fluctuations and speed governors were prevented from responding by the utilities with dead band configuring from49.5 Hz to 50.2 Hz with emergency unloading available only when frequency goes above 50.2 Hz. Efforts have been made to enable speed governors responding in the entire frequency range which has come to be known as free governor mode of operation (FGMO).[2] Availability Based Tariff (ABT) stabilized frequency in a narrower band, the quick fluctuations continued to occur with the frequency excursions of 0.5 Hz over a time period of 10 minutes and frequency shooting up to 50.2 Hz and above when sudden bulk load shedding or maximization of generation takes place before evening peak hours. When Dipping of frequency takes place during onset of peak loads or unit tripping. Such frequency fluctuations during normal operation in the grid leads to complex counter actions by the control centre operators at regional and state level. Further, for the fluctuating frequency even in an interval of 15 minutes does not give out clear signals to For example, 20000MW generation on FGMO operators to plan generation changes and load with 5% droop in Central grid would increase ISSN: 2231-5381 http://www.ijettjournal.org Page 2074 International Journal of Engineering Trends and Technology (IJETT) - Volume4Issue5- May 2013 system stiffness by 4000 MW per hertz. Consider a system of 10000 MW at 50 Hz. Assume a droop of 5% for the entire grid system. Case-1 If due to some reasons, a generator of 400 MW trips and no unit is under FGMO, the dip in frequency will be 50 X 400/20000 = 1 Hz. Case-2 Figure-4 Speed Governing System Functional Block Diagram [7] If FGMO is available only for 10000 MW due to disabling of the governing action in other sets, then Each block of Figure.4 can be represented by a first the frequency drop will be 50 X (400/10000) X order transfer function as shown below: [Xv / Ne] = [Kg / (1 + Tg s)] (1) 5/100 = 0.1 Hz. [Pm / Xv] = [1/ (1 + Tt s)] (2) Case-3 [Ns / Pm] = [1/ (Ta) s] (3) If FGMO is available for all the 20000 MW, the Ne= Nr - Ns (4) dip in frequency will be 50 X (400/20000) X 5/100 Where Nr, Ns, Ne = machine speed reference, = 0.05 Hz only. actual speed and speed error respectively Xv = governor valve opening Pm = mechanical power output (in per unit) Tg, Tt = time constants of governor and time constant of turbine respectively (in seconds) Ta = rotor acceleration time (in sec) Kg = Governor Gain s = Laplace operator = [d/dt] The above transfer functions can be transformed into differential equations. By substituting s = (d/dt). Letting yn (1) = Xv yn (2) = Pm yn (3) = Ns and dyn = d/dt (yn). The above block diagram is Figure-3 Free Governor Mode o f Operation [7] transformed into set of first order differential equations as shown below: From the above examples, it is clear that, more the Ne = Nr- yn (3); constituent units are under FGMO more is the dyn (1) = (Kg/Tg)*Ne - (1/Tg)*yn (1); stability of the Grid. In Western Region, by dyn (2) = (1/Tt)*yn (1) - (1/Tt)*yn (2); operating maximum possible number of units with dyn (3) = (1/Ta)*yn (2); their governors in free mode, by automatic under Typical values are: frequency load shedding and by using special Nr = 0.01 (corresponds to a step input from 0 to protection schemes, etc. the frequency stability is 0.01 p.u change in speed reference); being ensured. Therefore, Free Governor Mode of Tg = 0.2; Tt = 0.5; Kg = 20 Ta=9.8; Operation (FGMO) is the quickest way in To simulate the above equations in Matlab a Emergency High Frequency Control, particularly function called ode23 is used. This refers to during High Frequency regime. It is now clear that, ‘ordinary differential equation’ (ODE) solution more the constituent units are under FGMO more is using by Runge Kutta second and third order the stability of the Grid. [7] methods. [7] VI. DISCUSSION ON SIMULATION OF SPEED ISSN: 2231-5381 http://www.ijettjournal.org Page 2075 International Journal of Engineering Trends and Technology (IJETT) - Volume4Issue5- May 2013 VII. SIMULATION RESULTS 0.25 Speed Valve Controller 0.2 0.15 0.1 0.05 0 -0.05 -0.1 0 1 2 3 4 tsec 5 6 7 8 change in frequency by change in generation and is called Free Governor Mode of Operation (FGMO). If the requirements available in the governor and control circuits viz., load limiter, dead band, switching off the governor etc., are employed to limit the FGMO, it will lead to higher swings in frequency, instability of the grid and subsequent pull out even so that, more the constituent units are under FGMO more is the stability of the Grid. In Western Region, by operating maximum possible number of units with their governors in free mode, by automatic under frequency load shedding and by using special protection schemes. The frequency stability is being ensured. Result -1(In MATLAB Environment) REFERENCES [1] [2] [3] [4] [5] Result-2(In SIMULINK Environment) [6] VIII. CONCLUSION Maintaining frequency at constant value is very vital for the health of the power generating equipment and the utilization equipment at the customer end. The work of automatic frequency regulation is managed by governing systems of individual turbine-generators and Automatic Generation Control or Load frequency control system of the power system. The governors of all machines sense the frequency.When the turbogenerator is on bars, the governor of the turbine, if its wings are not clipped then responds to a change in frequency by varying the control valve lift and so changing the generation. Droop characteristics of the governor is depend on the variation in generation so the change in frequency by increasing or decreasing the generation. This mode of governor operation compensates the ISSN: 2231-5381 [7] [8] [9] [10] [11] [12] [13] Anjan Roy P. Pentayya and S.A.Khaparde, , “Experience of Blackouts and Restoration Practices in Western Region of India”, IEEE on Power Engineering Society General Meeting, vol.2, pp-2340 – 2345,2004. [2] Anjan Roy, S. A. Khaparde and P. Pentayya, Pushpa S.,“Operating Strategies for Generation Deficient Power System”, IEEE on Power Engineering Society General Meeting,vol.no. 3, pp-2738-2745,2005. Anjan Roy, S. A. Khaparde and P. Pentayya, S. Usha, A. R. Abhyankar, “ Operating Experience of Regional Interconnections In India”, IEEE on Power Engineering Society General Meeting,vol. 3 , pp- 2528 – 2535,2005. Geetha T, Mala E , Jayashankar V, Jagadeesh Kumar V, Sankaran P, “ Coordinated Measurements for governor operations in the Southern Indian Grid”,16th IMEKO TC4 Symposium,Sept. 22-24, 2008. H. Bevrani, Y. Mitani, and K. Tsuji, “Robust Load Frequency Regulation In a New Distributed Generation Environment”,Power Engineering Society General Meeting,IEEE,vol.no.22003. M.R.I. Sheikh, Md. Mejbaul Haque, and M.A. Hossa “Performance of Governor System on Minimizing Frequency Fluctuations with Wind Power Generation”, International Journal of Electrical and Computer Engineering (IJECE), Vol. 2, No. 1, pp. 46~56, February 2012. P. Nelson Vinotha Kumar Xavier, S. Muthukumar,“FREQUENCY REGULATION BY FREE GOVERNOR MODE OF OPERATION IN POWER STATIONS”, IEEE International Conference on Computational Intelligence and Computing Research, 2010. S. K. Parida, , S. N. Singh, S. C. Srivastava, P. Chanda, and A. K. Shukla, “Pros and Cons of Existing Frequency Regulation Mechanism in Indian Power Industry”, International Conference on Power System Technology and IEEE Power India conference,pp.1-6,2008. Annual Report of Western Regional Load dispatch Centre(2011-12), (http://www.wrldc.com) Central Electricity Regularity Commission New Delhi (2012),(http://www.wrldc.com). Guidelines for the Restricted Governor Mode of Operation(RGMO) Test in WR Grid on 5th April, 2010,[online],Available: http://www.wrldc.com/docs/fgmo.doc Lecture 44 and 45 Automatic generation control,[online].Available: http://www.sari-energy.org. Operating Procedure for Western Region (2011-12), (http://www.wrldc.com) http://www.ijettjournal.org Page 2076