Geometry of carrying simplices of 3-species competitive Lotka-Volterra systems Stephen Baigent
advertisement

Geometry of carrying simplices of 3-species
competitive Lotka-Volterra systems
Stephen Baigent
Department of Mathematics UCL, Gower Street, London WC1E 6BT, UK, Tel.:
+44 (0)207-679-3593, Fax: 44 (0)20-7383-5519
E-mail: s.baigent@ucl.ac.uk
Abstract. We investigate the existence, uniqueness and Gaussian curvature
of the invariant carrying simplices of 3 species autonomous totally competitive
Lotka-Volterra systems. Explicit examples are given where the carrying simplex
is convex or concave, but also where the curvature is not single-signed. Our
method monitors the curvature of an evolving surface that converges uniformly
to the carrying simplex, and generally relies on establishing that the Gaussian
image of the evolving surface is confined to an invariant cone. We also discuss
the relationship between the curvature of the carrying simplex near an interior
fixed point and its Split Lyapunov stability. Finally we comment on extensions
to general Lotka-Volterra systems that are not competitive.
Geometry of carrying simplices
2
1. Introduction
The Lotka-Volterra equations were introduced by Lotka and Volterra in the early
1920s to study populations of interacting species. For 3 species we will write them in
the form
ẋi = xi (bi − (Ax)i ) = Fi (x), i ∈ I3 ,
3
(1)
3×3
where b ∈ R , A ∈ R , and In = {1, 2, . . . , n}. We restrict to the case bi > 0, so that
the origin O is a repeller and normalize so that aii = bi . This normalization means
that there are axial fixed points e1 = (1, 0, 0)T , e2 = (0, 1, 0)T and e3 = (0, 0, 1)T . The
system (1) is mainly studied in the context of population dynamics, so phase space is
the nonnegative cone C = R3+ , where R+ = [0, ∞).
We will use the standard notation for ordering of vectors in Rn : For x, y ∈ Rn ,
x ≥ y ⇔ x − y ∈ C, x > y if x ≥ y and x 6= y, and x y ⇔ x − y ∈ C 0 , the interior
of C. Similar orderings are defined for real n × m matrices by considering them as
elements of Rnm .
We will be particularly interested in the asymmetric May-Leonard system [5]
which is a generalisation of the system studied by May and Leonard [18] and takes
the form
ẋ1 = x1 (1 − x1 − a12 x2 − a13 x3 )
ẋ2 = x2 (1 − x2 − a21 x1 − a23 x3 )
(2)
ẋ3 = x3 (1 − x3 − a31 x1 − a32 x2 )
where each aij > 0. As we shall see the special form (bi = aii = 1, i ∈ I3 ) is
particularly suitable for the methods that we develop here, and many of the examples
that we present will be for May-Leonard systems of the form (2).
In the case where A 0, so that the system (1) is totally competitive, one
of the most striking observations is that C contains a unique two-dimensional,
compact invariant Lipschitz manifold Σ known as the carrying simplex that contains
all nontrivial limit sets of (1). As shown by Hirsch [8] this carrying simplex is a
feature of all totally competitive Kolmogorov systems. More recently, Liang and Jiang
[16, 17] have extended Hirsch’s results to type-K competitive systems (see below for
definitions).
The purpose of this paper is to study the geometry of carrying simplices for
3-species Lotka-Volterra equations and how it relates to the stability of fixed points.
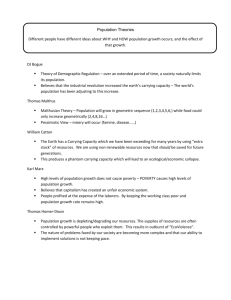
Figure 1 offers motivation for this study. It shows three examples of carrying
simplices for totally competitive Lotka-Volterra systems. Here the carrying simplices
are each graphs of functions defined on compact subsets of R2+ = {x ∈ R2 : xi ≥
0, i ∈ I2 }. Moreover, at the resolution of these figures, it appears that the Gaussian
curvature of each surface does not change sign. We will show here that while in many
cases the curvature does have a single sign, this is not always the case. Examples
are given where the carrying simplex is convex or concave, and also where for the
same carrying simplex there are regions of Σ0 , the relative interior of Σ in C, where
the curvature is of different sign. Computations are also presented for cases where
the carrying simplex appears to be saddle-like. (See below for a definition of convex,
concave and saddle-like carrying simplices). It is known that for planar Lotka-Volterra
systems, the carrying simplex is either concave, convex or a straight-line [30, 2].
Also hinted at by the figures, together with simulations for many other sets of
parameters, is a possible relation between curvature of Σ and stability of the interior
fixed point when it exists. When Σ0 is C 2 we will show by utilising the Split Liapunov
Geometry of carrying simplices
3
Figure 1.
Examples of the computed carrying simplex for competitive 3 dimensional Lotka-Volterra equations together with selected interior orbits to indicate stability of fixed points.
From left to
right the carrying simplex appears to be (i) concave,
(ii) convex and
(iii) saddle-like.
2.5
2.5
1.2
1.7
,
(ii)
1.5
1
Parameters b, A are:
(i)
3.5
1
1.5
0.7
1.7
1
,
, (iii)
1
1.5
0.5
0.5
0.7
0.5
3.5
1.2
1
1
0.7
1
0.5
1.2
1
,
1
1
0.5
1
0.7
1
1.5
1
0.5
,
. Notice that
Σ0
the interior fixed point is globally repelling in
for (i) and globally attracting
in C 0 for (ii). In (iii) the axial fixed point e1 is globally attracting in C 0 .
method [37, 12, 3] that a fixed point is globally repelling in Σ0 when Σ is locally
concave at p and globally attracting in C 0 when Σ is locally convex at p.
Our key observation is that under the flow generated by (1) (or indeed any
quadratic vector field), for small enough time, a plane is transported into a smooth
surface that has Gaussian curvature of a single sign (or zero). The problem, then, is
to show that the sign of curvature is preserved under the flow for all time. In [2] we
showed that this was the case for planar totally competitive Lotka-Volterra systems. It
turns out that a significant obstacle in showing concavity or convexity of the carrying
simplex for 3 species is proving that the Gaussian image (the image of the unit normal
map of the surface) of the evolving surface remains confined to a suitable convex cone.
2. Carrying simplices
Consider the Kolmogorov system on the nonnegative cone C = R3+ :
ẋi = xi fi (x), x ∈ C,
(3)
3
where f is a smooth vector field defined on an open subset f of R containing C.
We impose f (0) 0, so that the origin is a repellor, and total competitiveness, so
that Df (x) 0 for x ∈ C. We also suppose that there are axial fixed points at
e1 = (1, 0, 0)T , e2 = (0, 1, 0)T , e3 = (0, 0, 1)T . The stated conditions ensure that these
axial fixed points are unique.
For (1) the origin O repels trajectories and its basin of repulsion in C, B(O), is
open and bounded. Moreover the boundary of B(O) in C is identical to the boundary
of B(∞), the basin of repulsion of infinity, and is known as the carrying simplex; we
denote it by Σ. The properties of Σ are summarized by:
Theorem 1 (Adapted from Hirsch [8]) For system (3) with f (0) 0, Df 0,
there is a unique Lipschitz invariant manifold Σ that attracts C \ {0} and every
trajectory in C \ {0} is asymptotic to one in Σ. Σ is a balanced submanifold,
Geometry of carrying simplices
4
homeomorphic to the closed unit simplex S = {x ≥ 0 : x1 + x2 + x3 = 1} under
radial projection, and its interior Σ0 is strongly balanced.
(A set S is said to be balanced if both u 6 v and v 6 u hold, and strongly
balanced if both u 6< v and v 6> u hold, for any distinct u, v ∈ S.)
The geometry of Σ has been studied by several authors. In the case of planar
strongly competitive Kolmogorov systems (where only the off-diagonal terms of the
Jacobian matrix need be negative), it is known that the carrying simplex joining the
axial fixed points e1 = (1, 0) and e2 = (0, 1) is at least C 1 [0, 1] [20]. For planar totally
competitive Lotka-Volterra systems, it is known that Σ is either (i) strictly convex,
(ii) strictly concave or (iii) a straight line segment [38, 30, 2]. Interestingly, the sign
of a single parameter
ν = p (1 − a) + q (1 − b)
(4)
where p = b1 , q = b2 and a = a21 /a11 , b = a12 /a22 determines which of (i) - (iii) occurs
for a given set of bi and aij [30]. Indeed, if ν > 0(< 0) then the carrying simplex
is strictly convex(concave), and if ν = 0 the carrying simplex is a straight line. We
explained this trichotomy in [2] by showing that ν is proportional to the rate of change
of the Gaussian curvature of a straight line segment joining e1 and e2 . In [39], the
author shows examples of convex and concave planar carrying simplices that are zero
sets of quadratic functions.
To study the 3-species case, Zeeman and LaMar developed CSimplex [14], a
Geomview module [15], that enables computation and visualisation of Σ. Figure 1
shows examples from our own computations of carrying simplices for 3-species totally
competitive Lotka-Volterra systems. The surface Σ was obtained as the steady solution
(x1 , x2 ) 7→ u(x1 , x2 ) (when it exists) of the quasilinear partial differential equation
ut = h − f ux1 − gux2
2
(5)
for (x1 , x2 , t) ∈ (0, 1) × (0, ∞), and with initial conditions u(x1 , x2 , 0) = 1 − x1 − x2 .
Here fx1 denotes the partial derivative ∂f /∂x1 and similar subscript notation for
partial derivatives is used elsewhere. (Since Σ is strongly balanced on its interior, one
could also work with any of x1 , x2 or x3 as the dependent variable.)
We will follow Zeeman and Zeeman [37], who, in the case of totally competitive
systems, defined Σ to be convex if whenever m1 , m2 ∈ Σ then m = λm1 +(1−λ)m2 lies
below Σ for all λ ∈ (0, 1). Here ‘below’ is defined as follows: Partition C = L ∪ Σ ∪ U ,
where L∩U = ∅, and 0 ∈ L. Then x is strictly below(above) Σ if and only if x ∈ L(U ).
This choice of orientation means that the outward normal points into U , and mean
curvature is positive(negative) where Σ is convex(concave). It might help to think of
convexity in terms of solid bodies. Let Ω = L ∩ C. Since (3) is dissipative, Ω is the
global attractor. Then Σ is convex if the solid Ω is convex in the traditional sense: If
x, y ∈ Ω then λx + (1 − λ)y ∈ Ω for all λ ∈ [0, 1].
To define what we mean by saddle-like surfaces that are merely Lipschitz we need
to introduce the notion of cutting a crust off a surface (see, for example, page 57 in
[35]). Let M ⊂ R3 be a surface defined by a continuous mapping ψ : U → R3 of
U ⊂ R2 . A non-empty open set E ⊂ U with compact closure Ē ⊂ U 0 is called a
crust if there is a hyperplane Π such that E is a component of U \ ψ −1 (Π). If U1 ⊂ U
is such a component then we call ψ(U1 ) a crust. We say that the Lipschitz surface
M is saddle-like if there is no plane that cuts off a crust from M . When M is C 2 ,
this definition is consistent with the definition of a saddle surface as one where the
principal curvatures at each point have opposite sign.
Geometry of carrying simplices
5
3. Existence and Uniqueness of Carrying Simplices
In this section we will show how to obtain the carrying simplex Σ as the limit of the
image of a plane mapped by the flow of (3). While existence and uniqueness of Σ
follows from the work of Hirsch [8] (see also [10, 32]), we provide an adaptation of
Hirsch’s method which allows us to provide an elementary proof that certain planes
evolving under the competitive flow converge uniformly to Σ. This adaptation enables
us to study the curvature of the evolving surface and hence the curvature of the limiting
surface Σ.
Our method is based on the Graph transform method developed by Hadamard [7]
and used widely in the construction of inertial manifolds (see for example, [29]) and
stable manifolds. We start with a triangle M0 in R3 that is formed from the convex
hull of 3 axial points. This surface with corners is carried by the semiflow ϕt to a new
smooth surface Mt with corners. By choosing M0 close to (far from) the origin O we
may ensure that Mt is a increasing (decreasing) sequence of surfaces. These surfaces
converge uniformly to a unique invariant surface with corners which is the carrying
simplex Σ. We prove:
Theorem 2 Suppose that the Kolmogorov system (3) is totally competitive and
generates a semiflow ϕt : C → C for which the origin O is a repellor. Then there is
a unique Lipschitz invariant surface Σ such that if M is a plane with normal N 0
for which M0 = M ∩ C 6= ∅ then Mt = ϕt (M0 ) is a sequence of smooth surfaces (with
corners) that converges uniformly to Σ.
3.0.1. Surface Evolution Let Ω ⊆ R3 be open, simply-connected, and F : Ω → R3 a
vector field, at least C 1 , that generates a semiflow ϕt : Ω → Ω, t ≥ 0. Let M0 ⊂ Ω be
a C k parameterized regular surface (k ≥ 1) u 7→ x0 (u) on a simply-connected open set
U ⊆ R2 and define Mt = ϕt (M0 ) to be the new surface obtained by transporting M0 by
ϕt . By smooth dependence on initial conditions for autonomous ordinary differential
equations with smooth vector fields, the map u ∈ U 7→ ϕt (x0 (u)) ∈ Mt is smooth for
each t ≥ 0.
We wish to find, for a given point u = (u1 , u2 ) ∈ U , how the outward unit normal
N (u, t) at the point x(u, t) = ϕt (x0 (u)) on Mt evolves. In some instances we will not
work with the unit normal N (which is always denoted with a capital N ), but with
n = xu1 × xu2 which is also normal to the evolving surface at u but not necessarily of
unit length. The advantage of working with n is that its evolution equation is linear
in n (and for the Lotka-Volterra equation, also linear in x).
p
We denote by h·, ·i → the standard Euclidean inner product and |x| = hx, xi
for the Euclidean norm. DF is the Jacobian matrix with elements (Fi )xj = ∂Fi /∂xj .
For a square matrix W , Tr(W ) is the sum of its diagonal elements.
Lemma 1 Under the semiflow generated by the vector field F : Ω → R3 , we have, for
each u ∈ U , n = n(u, t) = xu1 × xu2 normal to the surface Mt at x = x(u, t) ∈ Ω,
ṅ = −DF (x)T n + Tr(DF (x))n.
(6)
Proof. We have ẋ = F (x) and hence ẋu1 = DF (x)xu1 and similarly ẋu2 = DF (x)xu2 .
d
(xu1 × xu2 ) = (DF (x)xu1 ) × xu2 + xu1 × (DF (x)xu2 ). Now let W be a real
Hence dt
3 × 3 matrix and consider w = W e1 × e2 + e1 × W e2 . Then
w = (w11 e1 + w12 e2 + w13 e3 ) × e2 + e1 × (w21 e1 + w22 e2 + w23 e3 )
Geometry of carrying simplices
6
= w11 e1 × e2 + w13 (−e3 × e2 ) + w22 e1 × e2 + w23 (e1 × e3 )
= Tr(W )e1 × e2 − w13 e3 × e2 − w23 e3 × e1 − w33 e1 × e2 .
Similarly
W e2 × e3 + e2 × W e3 = Tr(W )e2 × e3 − w11 e2 × e3 − w21 e3 × e1 − w31 e1 × e2
W e3 × e1 + e3 × W e1 = Tr(W )e3 × e2 − w12 e1 × e3 − w22 e3 × e1 − w32 e1 × e2 .
P
P
By linearity, for p = i pi ei , q = i qi ei we obtain W p × q + p × W q = Tr(W )(p ×
q) − W T (p × q). Now let p = xu1 , q = xu2 and W = DF (x).
Recall that a regular (parameterized) surface in R3 is a C 1 parameterized surface
x : U → R3 such that xu1 × xu2 6= 0 for all (u1 , u2 ) ∈ U .
Corollary 1 If M0 is regular then the surface Mt = ϕt (M0 ) is regular for all t ≥ 0.
After a little more work we also obtain:
Corollary 2 For totally competitive F in (1), if for u ∈ U we have n(u, 0) ∈ C and
x(u, 0) ∈ C 0 then n(u, t) ∈ C 0 for all t > 0. If n(u, 0) ∈ C 0 then n(u, t) ∈ C 0 for all
t ≥ 0.
A simple calculation for N = n/|n| shows
Corollary 3 Under the flow generated by the vector field F : Ω → R3 , we have, for
u ∈ U and N (u, t) the unit normal to the surface Mt = ϕt (M0 ) at x = x(u, t) ∈ Mt ,
Ṅ = −DF (x)T N + hN , DF (x)N iN .
(7)
We now follow the general idea of [8]. We say that a C 1 surface M given
x ×x
parametrically by x : U → R3 whose Gaussian image S(M ) = { |xuu1 ×xuu2 | : (u1 , u2 ) ∈
1
2
U } is a subset of C has a nonnegative Gaussian image.
Let ι = √13 (1, 1, 1)T and denote by πι : R3 → Πι the projection given by
πι (x) = x − hx, ιi ι. We also denote by πe3 : R3 → R2 denote the projection defined
by πe3 (x1 , x2 , x3 ) = (x1 , x2 ).
Before turning to the proof of theorem 2, a comment on smoothness is in order.
If A ⊂ R3 is a set (not necessarily open) we say that f : A → R is smooth if there
is an open set A0 ⊃ A and smooth function fˆ : A0 → R such that fˆ restricted to A
coincides with f . If M is a plane through the origin with normal N 0 such that
M0 = M ∩ C 6= ∅ then M0 is a smooth surface (manifold) with corners. In the present
context, by a smooth surface M with corners we mean that each point m ∈ M ⊂ R3
there is a (relatively) open set Ω ⊂ [0, ∞)2 and a diffeomorphism φ : Ω → φ(Ω) ⊂ M
with φ(Ω) (relatively) open in R3 and m ∈ φ(Ω). If Mt = ϕt (M0 ), where ϕt is the
semiflow of (3), for t ≥ 0 Mt is a smooth surface with corners (see [13] for a discussion
of manifolds with corners in relation to carrying simplices).
Remark In [13] the authors find necessary and sufficient conditions for Σ to be a C 1
manifold with corners neatly embedded in C. If ∆ ⊂ C is the unit probability simplex
and Σ = {r(x)x : x ∈ ∆}, then Σ is said to be a C 1 manifold with corners neatly
embedded in C if r is C 1 (on an open subset X ⊃ ∆ of the affine hull of ∆), so that
at no point in ∂Σ is the carrying simplex Σ tangent to ∂C. Examples are given in [21]
and [13] where Σ is not a neat embedding, and also where Σ is not differentiable on its
boundary. In the context of the current paper, existence of a strongly balanced tangent
Geometry of carrying simplices
7
plane to the carrying simplex Σ at each of the axial fixed points (or equivalently that
DF (ei )T has a positive right eigenvector for each i ∈ I3 ) is necessary and sufficient
for Σ to be a C 1 manifold with corners (neatly embedded in C).
In the sequel, when we speak of a surface, unless otherwise specified we mean a
surface with corners.
In the next result, we make use of the well-known fact (see, for example, [25, 9])
that a competitive flow is order-preserving backwards in time. In other words, if
ϕt : C → C denotes the semiflow of (3) and ϕt (x) ≥ ϕt (y) then ϕs (x) ≥ ϕs (y) for all
0 ≤ s ≤ t.
Lemma 2 Let M be a plane with unit normal N 0 such that M0 = M ∩ C 6= ∅.
If Mt = ϕt (M0 ), where ϕt is the semiflow of (3), then Mt is a sequence of smooth
Lipschitz surfaces of rank unity with positive Gaussian images S(Mt ).
Proof. Let M0 be the convex hull of three axial points Pi , i ∈ I3 . The boundary
∂M0 is the union of the three line segments P1 P2 , P2 P3 , P3 P1 . The flow ϕt : C → C
is a diffeomorphism that leaves, for each i ∈ I3 , the faces Fi = x−1
i (0) of C invariant.
Since ϕt is a diffeomorphism, ϕt (∂M0 ) = ∂(ϕt (M0 )) = ∂Mt and by invariance of the
Fi , ∂Mt = ϕt (P1 P2 ) ∪ ϕt (P2 P3 ) ∪ ϕt (P3 P1 ) ⊂ ∂C. Since Mt = ϕt (M0 ) is simply
connected, x0 ∈ M0 7→ ϕt (x0 ) ∈ Mt is a smooth map and defines a smooth surface Mt
(with boundary belonging to ∂C). By corollary 2, Mt has positive Gaussian image
since M0 has.
Let Πι denote the plane through O with unit normal ι. Following [8], suppose
that there are distinct x, x0 ∈ Mt such that πι (x) = πι (x0 ). Then x − x0 = hx − x0 iι so
that x, x0 are ordered. But then ϕ−t (x), ϕ−t (x0 ) are ordered points in M0 which is a
contradiction. Thus we must have x = x0 , and so we conclude that πι restricted
to Mt is one-to-one. Choose a pair of vectors which are orthogonal to ι, say
v1 = (1, −1, 0)T , v2 = (0, 1, −1)T . Then x = X1 v1 + X2 v2 + X3 ι for some Xi , i ∈ I3 .
Let Vt = {(X1 , X2 ) ∈ R2 : X1 v1 + X2 v2 ∈ πι (Mt ). Since πι restricted to Mt is one-toone, we may write x(X1 , X2 ) = X1 v1 + X2 v2 + φt (X1 , X2 )ι, and so Mt is the graph of
a smooth function φt : Vt → R. The vector (φt )X1 v1 + (φt )X2 v2 + ι is normal to Mt at
X1 v1 +X2 v2 and, since Mt has positive Gaussian image, (φt )X1 , (φt )X2 are constrained
by the three inequalities (φt )X1 hv1 , ei i + (φt )X2 hv2 , ei i + hι, ei i > 0 for i ∈ I3 . Writing
p = (φt )X1 , q = (φt )X2 , these inequalities read 1−q−2p > 0, 1−q+2p > 0, 1+2q+p > 0
which defines a triangular region in p, q−space that is contained in [−1, 1]2 . Hence
φt : Vt → R is Lipschitz rank unity for each t ≥ 0.
For each t ≥ 0 let Mt− denote the set of points in C lying below Mt and Mt+
denote the set of points in C lying above Mt . Then we say that the sequence of surfaces
Mt is increasing(decreasing) if for each t > s we have Ms− ⊂ Mt− (Mt− ⊂ Ms− ).
Lemma 3 Let M be a plane with outward unit normal N 0 such that M0 =
M ∩ C 6= ∅. Let the Kolmogorov vector field F generate the semiflow ϕt : C → C
via (3). If hF , N i > (<)0 on M0 then the surfaces Mt = ϕt (M0 ) form an increasing
(decreasing) sequence of smooth Lipschitz surfaces.
Proof. Let M0 = {m ∈ C : hm, N i = d > 0} and write each x ∈ Mt as x = R(m)m
where m ∈ M0 and R(m) > 0. Then hN, F i = hN, ẋi = Ṙd. Since at t = 0 we have
hN, F i > 0, Ṙ > 0 at t = 0 for all m ∈ M0 and R is strictly increasing in some interval
t ∈ (0, τ ∗ ). Hence Mς− ⊂ Mτ− for all τ, ς ∈ (0, τ ∗ ) with ς < τ . It then follows that
Geometry of carrying simplices
8
Mς− ⊂ Mτ− for all τ, ς ∈ [τ ∗ , 2τ ∗ ) with ς < τ , since, using that ϕτ ∗ is a diffeomorphism,
ϕτ ∗ (Mς− ) ⊂ ϕτ ∗ (Mτ− ) for all τ, ς ∈ (0, τ ∗ ) with ς < τ . Repeating the argument shows
that Mt− is an increasing sequence of nested, simply-connected subsets of C.
Lemma 4 For the totally competitive Kolmogorov system (3) there exists an
increasing(decreasing) sequence of smooth Lipschitz surfaces with positive Gaussian
images that converges uniformly to a unique invariant Lipschitz surface Σ.
Proof. Let M0 = (M + ι) ∩ C. Since O is an unstable node, by choosing > 0
small enough we may arrange that at each point on M0 we have hι, F i > 0 at
t = 0. By lemma 3, Mt is a (bounded) increasing sequence of uniformly Lipschitz
surfaces. Following the notation of lemma 2, each surface Mt is the graph of a
Lipschitz function φt : Vt → R rank unity, and φt can be extended to a Lipschitz
function φ̂t : R2 → R of rank unity on all of R2 [19] and explicitly given by
φ̂t (X) = supY ∈Vt {φt (Y ) − |X − Y |}. Notice that for increasing Mt we have for
the Lipschitz extensions φ̂t (X) ≥ φ̂s (X) for all X ∈ R2 and t ≥ s. To see this note
that Ms− ⊂ Mt− implies that πι (Ms ) ⊂ πι (Mt ) and hence that Vs ⊂ Vt . Thus for all
X ∈ R2 , φ̂t (X) ≥ supY ∈Vs {φt (Y ) − |X − Y |} ≥ supY ∈Vs {φs (Y ) − |X − Y |} = φ̂s (X).
If K ⊂ R2 is compact then by the Arzelà-Ascoli theorem φ̂t restricted to K
converges uniformly to a Lipschitz function φ1 : K → R of rank unity. Thus by
taking the set K sufficiently large to contain all Vt for t ≥ 0, by monotonicity in t
we obtain a Lipschitz invariant surface Σ1 as the intersection of C with the graph of
φ1 . Similarly, taking > 0 large enough we may generate a decreasing sequence that
converges uniformly to an invariant surface Σ2 .
To show Σ1 = Σ2 = Σ, let us suppose not. We introduce, for ε > 0 small,
−1
the function σ(x) = ((x1 + ε)(x2 + ε)(x3 + ε))
> 0 ∀x ∈ C. Then, writing
Fi (x) = xi fi (x),
!
!
3
3
X
X
fi
xi (fi )xi < 0
−
div(σF ) = σ ε
x +ε
i=1
i=1 i
for all x ∈ C \ Ξε , where Ξε is a neighbourhood of the origin of order ε and so can be
made as small as we wish by choosing ε > 0 small enough. If there are two distinct
Lipschitz invariant surfaces Σ1 , Σ2 then as the origin is an unstable node (so that
Σ1 , Σ2 are disjoint from a small neighbourhood of O), we may take ε sufficiently
small that the volume J enclosed by Σ1 , Σ2 has div(σF ) < 0. Then, from the
divergence theorem, since F is tangent to Σ (where Σ is differentiable, which it is
almost everywhere), and hF, ni = 0 on ∂J ∩ ∂C, we have
Z
Z
0=
σhF, ni dA =
div(σF ) dV < 0,
∂J
J
which is a contradiction, so that we must have Σ1 = Σ2 .
Combining lemmas 2, 3 and 4 gives theorem 2.
Remark Consequently, if M0 ⊂ C is any surface not containing O that is the image
of the unit probability simplex under a continuous map that leaves ∂C invariant, we
have ϕt (M0 ) → Σ as t → ∞.
Geometry of carrying simplices
9
4. Evolution of Gaussian curvature
In this section we are interested in tracking the change in curvature of a regular
surface by computing the change in its second fundamental form. As we shall see the
advantage of starting with a plane is that the flow deforms it so that for small enough
times its Gaussian curvature is uniformly single-signed.
Let u ∈ U ⊂ R2 7→ x(u) ∈ R3 define the surface. Pick a point x ∈ M and denote
by Tx M the tangent space to M at x. Given a vector field Y : M → Tx R3 = R3 , for
X ∈ Tx M , denote by DX Y the directional derivative of Y (in the direction of X). If N
is the unit outward normal of M , 0 = DX |N |2 = 2hDX N, N i so that DX N ∈ Tx M .
Now define the Weingarten map Lx : Tx M → Tx M via Lx (X) = −DX N . The
2nd fundamental form at x ∈ M is the bilinear form B : Tx M × Tx M → R
defined by B(X, Y ) = hL(X), Y i for X, Y ∈ T M . If the surface M is parameterized
u ∈ U 7→ x(u), we denote by Ψ the matrix with i, jth element B xui , xuj . It can be
shown that for tangent vectors xui at a point u ∈ U ,
Ψij = xui uj , N .
In our present application Ψ is the 2 × 2 real symmetric matrix
xu1 u1 ,xu1 ×xu2
x
, x ×x
h |xu ×xu | i h u1|xu2u ×ux1 u | u2 i
1
1
2
2
.
Ψ=
xu2 u2 ,xu1 ×xu2
xu1 u2 ,xu1 ×xu2
h |xu ×xu | i h |xu ×xu | i
1
2
1
2
We recall that a real symmetric matrix P is positive(negative) definite if hv, P vi >
0(< 0) for all v 6= 0, or equivalently that its spectrum is positive(negative). Also, if
strictly inequality is replaced by inequality, we replace ‘definite’ by ‘semidefinite’. If Ψ
is positive(negative) definite at x ∈ M then M is locally convex(concave) at x, whereas
if the eigenvalues of Ψ have opposite sign at x ∈ M then M is locally saddle-like at
x. The Gaussian curvature of M at x(u) is κ = det Ψ/|xu1 × xu2 |2 .
4.1. Evolution of the Second Fundamental Form
The following lemma determines how the sign of the Gaussian curvature of the evolving
surface Mt = ϕt (M0 ) evolves following a point moving with the surface. Let the
outward unit normal of the surface be N .
In the following F : R3 → R3 denotes the vector field that generates the flow via
ẋ = F (x).
Lemma 5
Ψ̇ = Θ + hN , DF N i Ψ
(8)
and
Z
t
hN, DF N i dτ
Ψ(t) = exp
Z
Ψ(0) +
0
t
Z
where the 2 × 2 matrix Θ has elements
*
!
+
3
X
Θij (t) = xui ,
Nk D2 Fk xuj .
k=1
hN, DF N i dτ
Θ(s) exp
0
t
s
ds
(9)
Geometry of carrying simplices
10
Proof. We have
Ψ̇ij =
d xui uj , N
dt
D
E
D
E
(ẋ)ui uj , N + xui uj , Ṅ
= (F )ui uj , N + xui uj , (−DF T N + hN , DF N iN )
= xui D2 F xuj + DF xui uj , N
+ xui uj , (−DF T N + hN , DF N iN )
= xui D2 F xuj , N + hN , DF N iΨij
=
= Θij + hN , DF N iΨij .
This last matrix equation can be integrated explicitly to give (9).
In what follows, for a given square matrix M we denote by M S the symmetrisation
of M ; that is, M S = M + M T .
Corollary 4 If M0 is a plane with unit normal N then at t = 0 (taking a
parameterisation linear in the ui )
*
!
+
3
X
2
Ψ̇ij (t = 0) = xui ,
Nk D Fk xuj , i, j ∈ I2 .
k=1
and
Z
Ψ(t) =
t
Θ(s)η(t, s) ds
(10)
0
where η(t, s) = exp
R
t
hN, DF N i dτ
s
> 0. In particular, for the Lotka-Volterra
equations (1) we obtain
Θij (t) = − xui , V xuj , i, j ∈ I2 .
(11)
S
(12)
where
V = (diag[N ]A) .
Remark The matrix V = (diag[N ]A)S has been utilised by Zeeman and Zeeman in
their Split Liapunov method [37]. They showed that for totally competitive LotkaVolterra systems with a unique interior fixed point p, if all (non-trivial) trajectories
crossed the strongly-balanced tangent plane Tp Σ, with outward normal N 0,
through p downwards, then p is a global attractor (on the interior of Rn+ ). The
condition that they obtained for all trajectories to cross Tp Σ \ {p} downwards is
precisely that hv, (diag[N ]A)S vi > 0 for v ∈ Tp Σ \ {0}. In [12, 3] the Split Liapunov
method was extended to deal with not-necessarily competitive Lotka-Volterra systems
and also for boundary fixed points.
4.2. Useful expressions for Θ
Let us suppose that the initial surface M0 is planar. The second fundamental form at
time t ≥ 0 is given by (10) and with (12)
hxu1 , V xu1 i hxu1 , V xu2 i
Θ(t) = −
,
hxu2 , V xu1 i hxu2 , V xu2 i
Geometry of carrying simplices
11
so that det Θ = hxu1 , V xu1 ihxu2 , V xu2 i − hxu1 , V xu2 ihxu2 , V xu1 i = hxu1 × xu2 , V xu1 ×
V xu2 i. Now we use the identity: For W a real 3 × 3 matrix and a, b ∈ R3 ,
W a × W b = adj(W ) (a × b), where adj(W ) is the transpose of the cofactor of W . Then
det Θ = hxu1 ×xu2 , V xu1 ×V xu2 i = |xu1 ×xu2 |2 hN, adj(V )N i. Since V = (diag[N ]A)S ,
adj(V ) is a 3 × 3 symmetric matrix with entries that are homogeneous in N of degree
2, and hN, adj(V )N i is a homogeneous polynomial in N of degree 4. By regularity of
the surface det Θ ≥ 0 if and only if hN, adj(V )N i ≥ 0.
For convenience, set
A1 = a31 − a11 , A2 = a12 − a22 , A3 = a23 − a33
(13)
B1 = a11 − a21 , B2 = a22 − a32 , B3 = a33 − a13
and define the 3 × 3 symmetric matrix
−(A1 + B1 )2
A1 (A2 − B2 ) + B1 (A2 + B2 )
L=
B1 (B3 − A3 ) + A1 (A3 + B3 )
A1 (A2 − B2 ) + B1 (A2 + B2 ) B1 (B3 − A3 ) + A1 (A3 + B3 )
−(A2 + B2 )2
A2 (A3 − B3 ) + B2 (A3 + B3 ) .(14)
A2 (A3 − B3 ) + B2 (A3 + B3 )
−(A3 + B3 )2
The matrix L satisfies det L = 4(A1 A2 A3 − B1 B2 B3 )2 ≥ 0 and
det Θ = |xu1 × xu2 |2 hN, adj(V )N i
= |xu1 × xu2 |2 ∆L (N ),
where ∆L : R3 → R is defined by
∆L (p) = h(p2 p3 , p1 p3 , p1 p2 ), L(p2 p3 , p1 p3 , p1 p2 )i, p = (p1 , p2 , p3 )T ∈ R3 .
(15)
For a regular surface M , det Θ = 0 at a point on M where the unit normal is N if and
only if ∆L (N ) = 0. The function ∆L is a quartic, and sometimes it is more convenient
to use the quadratic function δL : R3 → R defined by
δL (v) = hv, Lvi, v ∈ R3 .
(16)
In fact, when N 0, we may set vi = 1/Ni for each i ∈ I3 so that
δL (v1 , v2 , v3 ) = (N1 N2 N3 )2 ∆L (N1 , N2 , N3 ).
−1
0
Thus N ∈ ∆−1
L (0) ∩ C if and only if v = (1/N1 , 1/N2 , 1/N3 ) ∈ δL (0). This means
that to find unit normals where det Θ = 0, we need only investigate zeros of quadratic.
Suppose that a plane Π 3 x has unit normal N = (N1 , N2 , N3 ). Since
N 0, we may take linearly independent tangent vectors w1 = (−N2 , N1 , 0)
and w2 = (0, −N3 , N2 ) that span Tx Π, so that w1 × w2 = N2 (N1 , N2 , N3 ).
For given ru1 = p1 w1 + p2 w2 , ru2 = q1 w1 + q2 w2 , then hru1 , (diag[N ]A)S ru1 i =
P2
S
S
i,j=1 pi pj hwi , (diag[N ]A) wj i = hp, Υpi, where Υij = hwi , (diag[N ]A) wj i. Then
hp, Υpi hp, Υpi
Θ=−
= −JΥJ T .
hq, Υpi hq, Υqi
where J = (p|q)T . Hence Θ is positive(negative) definite if and only if Υ is negative(
positive) definite. An explicit expression for Υ is
Υ=
2N1 (A2 N1 − B1 N2 )
(B2 − A2 )N1 N3
−(A3 + B3 )N1 N2 + (A1 + B1 )N2 N3
−1
N2
(B2 − A2 )N1 N3
−(A3 + B3 )N1 N2 + (A1 + B1 )N2 N3
2N3 (A3 N2 − B2 N3 )
. (17)
Geometry of carrying simplices
12
Since N 0 we may set vi = 1/Ni for i ∈ I3 , so that v2 Υ =
−diag[(1/v1 , 1/v3 )] θ diag[(1/v1 , 1/v3 )] where θ is the 2 × 2 symmetric matrix
(B2 − A2 )v2
2(A2 v2 − B1 v1 )
−(A3 + B3 )v3 + (A1 + B1 )v1
.
(18)
θ=
(B2 − A2 )v2
2(A3 v3 − B2 v2 )
−(A3 + B3 )v3 + (A1 + B1 )v1
Θ is positive(negative) definite if and only if θ is negative(positive)definite.
4.2.1. det Θ positive This means that Θ, or equivalently θ, is definite.
Lemma 6 If Θ(τ ) is positive(negative) semidefinite for 0 ≤ τ < t, and Ψ(0) is
positive(negative) semidefinite then Ψ(t) is positive(negative) semidefinite for 0 ≤
τ < t. If Θ(τ ) is positive(negative) semidefinite for 0 ≤ τ < t, and actually
positive(negative) definite for t in a measurable subset of [0, t] of positive measure,
and Ψ(0) is positive(negative) semidefinite, then Ψ(t) is positive(negative) definite for
0 ≤ τ < t.
Proof.
We deal with the positive definite or semidefinite
case only.
R
t
Ψ(0) is positive semidefinite, then so is I1 = exp 0 hN, DF N i dτ Ψ(0).
If
If
Θ(τ ) is positive
semidefinite
R
for 0 ≤ τ < t then so is the integral I2 =
Rt
t
Θ(s)
exp
hN,
DF
N
i
dτ
ds. Then Ψ(t) = I1 + I2 is positive semidefinite. If
0
s
Θ(τ ) is positive definite on a measurable subset of [0, t] of positive measure then I2 is
positive definite so that then Ψ(t) = I1 + I2 is positive definite.
Theorem 3 Let M be a plane with normal N 0 such that M0 = M ∩ C 6= {0}.
Let Mt = ϕt (M0 ) for t ≥ 0 where ϕt : C → C is the semiflow generated by
the totally competitive Lotka-Volterra system (1). Then if θ(t) defined by (18) is
positive(negative) semidefinite for 0 ≤ t < T then Mt is a concave(convex) surface
for 0 ≤ t < T . If T = ∞ then Mt converges uniformly to a concave(convex) carrying
simplex Σ.
Proof. If θ(t) is positive(negative) semidefinite for 0 ≤ t < T then Θ(t) is
negative(positive) semidefinite for 0 ≤ t < T . By lemma 6, this means that Ψ(t)
is negative(positive) semidefinite for 0 ≤ t < T . Since Mt is a the graph of a function,
local concavity(convexity) due to global negative(positive) definiteness of Ψ(t) extends
to global concavity(convexity).
First consider the case that each surface Mt = ϕt (M0 ) has negative semidefinite
2nd fundamental form Ψ(t) for each t ≥ 0. Each Mt is the graph of a function
ψt : πι (Mt ) → R that can be extended outside πι (Mt ) to form a continuous convex
function ψ̂t : K → R where πι (Mt ) ⊂ K and K is convex. By Theorem 10.8 of [24] the
(Lipschitz) limit Σ of the sequence of Mt is the graph of a continuous convex function
ψ̂ = limt→∞ ψ̂t on K, and so Σ is concave.
When each surface Mt = ϕt (M0 ) has positive semidefinite 2nd fundamental form
Ψ(t) then each Mt is convex and we replace Mt by M̂t = −Mt which yields a sequence
of concave surfaces that converge to a concave −Σ so that Σ is convex.
Corollary 5 If each Fi (x) = xi fi (x) is convex(concave) then Σ is convex(concave).
Geometry of carrying simplices
13
Proof. If each Fi is convex(concave) then each D2 Fi is positive(negative) semidefinite.
If ξ ∈ R2 is any fixed vector,
hξ, Θ(t)ξi =
2
X
ξi Θij (t)ξj =
i,j=1
where V (t) =
P3
k=1
2
X
ξi ξj xui , V (t)xuj ,
i,j=1
Nk D2 Fk is positive(negative) semidefinite. But
2
X
ξi ξj xui , V (t)xuj = hζ, V (t)ζi
i,j=1
P2
where ζ =
i=1 ξi xuj . Since V (t) is positive(negative) semidefinite, hξ, Θ(t)ξi =
hζ, V (t)ζi ≥ 0 and hence Θ(t) is positive(negative) semidefinite and the result follow
from theorem 3.
Remark Corollary 5 does not require knowledge of how the Gaussian image S(Mt ) of
Mt evolves, but it is rather limited in its application. We will give another example,
namely Example 2 in 7.2, where knowledge of the Gaussian image of Mt is not needed
to determine the curvature of Σ. However, in general, it is necessary to monitor the
development of the normal of Mt in order to ensure that Θ(t) remains definite, so that
theorem 3 may be applied.
Remark If we change coordinates in (1) via yi = log xi , i ∈ I3 , we obtain the
transformed system
ẏi = Gi (y) = bi −
3
X
aij eyj , i ∈ I3 .
(19)
j=1
3
This is another totally competitive system, but this time on the whole
P3of R . In2 these
2
y1
y2
y3
new coordinates, D Gk (y) = −diag[(ak1 e , ak2 e , ak3 e )], so that k=1 Nk D Gk is
now negative definite. Thus in these new coordinates the invariant surface is always
concave.
Remark For (3), V = (diag[N ]A)S , so from the calculations in corollary 5, a sufficient
condition for Θ to be positive definite at a point on Mt where the unit normal is N is
that (diag[N ]A)S is positive definite.
4.2.2. det Θ negative If det Θ(0) < 0 then det Ψ(t) < 0 for t > 0 sufficiently small,
but as is well known the set of 2 × 2 symmetric matrices with negative determinant
does not form a convex set, so using (10) does not appear to be fruitful. If, for example,
a31 < a11 , a33 > a13 , a32 > a22 , a23 > a33 , then det Θ(t) < 0 for all t > 0, but this
cannot be easily translated into det Ψ(t) < 0 for t > 0.
5. Global geometry of Σ
5.1. Establishing bounds on the Gaussian image S(Mt )
As we have seen, via (17), the Gaussian image S(Mt ) of the surface Mt has a strong
bearing on its curvature. In this section the aim is to find ways to ensure that the
Gaussian image S(Mt ) of the surface Mt is confined to a suitable cone K ⊂ R3+ .
We recall that a set K ⊂ Rm is a cone provided that µK ⊂ K for all µ ≥ 0.
A cone is proper provided that it is closed, convex, has non-empty interior and is
pointed (K ∩ (−K) = {0}). Two commonly used proper cones are Kq = Rm
+ , and
Geometry of carrying simplices
14
qP
m−1 2
the ice cream cone Kice = {x ∈ Rm
+ : |xm | ≥
i=1 xi }. Kq is an example of a
polyhedral cone; that is, a cone formed from the intersection of a finite number of
closed half spaces. The cone dual to K, denoted by K ∗ is the convex cone of linear
functions {y ∈ (Rm )∗ : hy, ki ≥ 0 ∀k ∈ K}. A flow ϕt : U → U on an open set
U ⊂ Rm preserves a proper cone K ⊂ U if ϕt K ⊂ K.
Our objective is to control the deviation of the surface normal from a fixed vector
` 0 by ensuring that it is confined to a suitable convex cone K.
Let % : R3 → R be a C 1 homogeneous function of degree r, i.e. %(tz) = tr %(z)
for each z ∈ R3 , t ∈ R and suppose that the cone K% = {n : %(n) ≥ 0} has nonempty
interior. Then using (6)
%̇(n) = hD%(n), ṅi
= hD%(n), (−DF (x)T n + Tr(DF (x))n)i
= − hD%(n), DF (x)T ni + Tr(DF (x))hD%(n), ni
1
= − hD%(n), DF (x)T ni whenever %(n) = hD%, ni = 0.
r
Thus if the cone K% is to remain invariant under the dynamics (6) of the surface
normal n(t), we need hDF (x)D%(n), ni ≤ 0 whenever %(n) = 0 and x ∈ C. Since for
P3
the Lotka-Volterra system DF (x) = Λ − i=1 xi Ωi where Λ = diag[(a11 , a22 , a33 )] is
the diagonal matrix of diagonal elements of A, and
2a11 a12 a13
a12
0
0
a13 0
0
,
a21 0 , Ω2 = a21 2a22 a23 , Ω3 = 0 a23
0 (20)
Ω1 = 0
0
0 a31
0
0
a32
a31 a32 2a33
a sufficient condition for invariance is
3
X
1
−hΛD%(n), ni +
xi hΩi D%(n), ni ≥ 0 when %(n) = hD%(n), ni = 0, ∀x ∈ C. (21)
r
i=1
Lemma 7 (Cone invariance) A sufficient condition for invariance of a given cone
K% = {n ∈ C : %(n) ≥ 0}, for % homogeneous degree r > 0, under (6) is that
hD%(n), Λni ≤ 0
whenever %(n) = 0,
(22)
together with
∀i ∈ I3 , hΩi D%(n), ni ≥ 0
whenever %(n) = 0.
(23)
For the asymmetric May-Leonard system (2), Λ is the identity matrix and by Euler’s
theorem hD%(n), ni = r%(n) and the condition (22) becomes redundant.
Recall that we wish to confine the Gaussian image S(Mt ) of an evolving surface,
so that Θ(t) remains definite for t > 0. In terms of θ(t) in (18), this means that
det θ(t) > 0 for t > 0. Recall that δL (v) = hv, Lvi and that δL (v) = 0 if and only
if det θ = 0. We define KL = {n ∈ C : δL (1/n) ≥ 0} which is a cone. Our broad
aim, then, is to show that there is a cone K% , defined via a homogeneous function %
as above, which is invariant under the normal dynamics (6), and which is a subset of
KL , since this is then enough to ensure that Θ(t) is either positive or negative definite
for all t > 0.
Theorem 4 (Convex and concave carrying simplices) Let M be a plane with
outward unit normal N 0 such that M0 = M ∩ C 0 6= ∅, and ϕt : C → C the flow
generated by the totally competitive Lotka-Volterra system (1). Suppose that there
Geometry of carrying simplices
15
exists a cone KP ⊂ KL which is invariant under the normal dynamics (6). Then
if θ(0) is positive(negative) definite, Mt = ϕt (M0 ) is a sequence of concave(convex)
Lipschitz surfaces that converges uniformly to a concave(convex) carrying simplex Σ.
5.2. Conditions for an invariant cone
Let S be a symmetric 3 × 3 matrix with one positive eigenvalue λ3 and two
negative eigenvalues −λ1 , −λ2 . Then there is an orthogonal matrix W such that
W T diag[(−λ1 , −λ2 , λ3 )]W = S. Hence %S (χ) = hχ, Sχi = hW χ, diag[λ]W χi =
λ3 (W χ)23 − λ1 (W χ)21 − λ2 (W χ)22 and
r
r
λ3
λ3
T
cos s,
sin s, 1)T , µ ∈ R+ , s ∈ [0, 2π).
%S (χ) = 0 ⇔ χ = µW (
λ1
λ2
Hence the matrix S defines an ellipsoidal cone in R3 with boundary %−1
S (0).
Given a unit vector ` 0, then K = {n ∈ R3 : h`, ni ≥ γ|n|} where γ ∈ (0, 1) is a
solid convex cone with nonempty
interior whose boundary subtends an angle cos−1 γ
p
with `. If γ > maxi∈I3 1 − `2i then K \ {0} ⊂ C 0 . It is easy to see that K = KP
where
KP = {n ∈ R3 : hn, P ni ≥ 0, h`, ni ≥ 0}, P = Φ − γ 2 I, Φ = ((`i `j )).
For KP to be invariant under (6), we need hn, (P DF (x)T + DF (x)P )ni ≤ 0
whenever hn, P ni = 0. This is ensured if for each i ∈ I3 we have
hn, (Ωi P + P ΩTi )ni ≥ 0 whenever hn, P ni = 0.
(24)
One way of proceeding would be to follow the methods developed in [26, 22, 1] where
it is used that hn, P Ani > 0 on hn, P ni = 0 if and only if there exists ξ such that
(P A)S + ξP is positive definite. In our case, however, we find it more convenient to
use an explicit approach using the one-parameter parameterization of the intersection
of the cone hn, P ni = 0 with the unit sphere as now described. The real symmetric
matrix Φ has eigenvalues {0, 0, 1} (since the third eigenvalue is `21 + `22 + `23 = 1), which
in turn means that P has eigenvalues {−γ 2 , −γ 2 , 1−γ 2 }. Moreover, ` is an eigenvector
of P associated with the eigenvalue 1 − γ 2 . Two linearly independent eigenvectors for
the eigenvalues −γ 2 are (−`2 , `1 , 0)T and (−`3 , 0, `1 )T . From these, the Gram-Schmidt
process can be used to form the orthogonal matrix
√ `21 2
− √ `22 2
0
`
+`
`
+`
1
2
1
2
p
`1 `3
`2 `3
E=
`21 + `22
− √`21 +`22 − √`21 +`22
.
`1
`2
`3
√ 2
√ 2
1−γ
1−γ
We then have EP E T = diag[(−γ 2 , −γ 2 , 1−γ 2 )] and so n = E T ( γ cos s, γ sin s, 1)T
and we may take the parameterization
`1 −2rτ `3 + τ 2 γ + γ + r`2 τ 2 − 1
n(τ ) = `2 −2rτ `3 + τ 2 γ + γ + r`1 1 − τ 2
(25)
2rτ `21 + `22 + γ`3 τ 2 + 1
p
where r = p
(1 − γ 2 )/(`21 + `22 ) and sin s = 2τ /(1 + τ 2 ), cos s = (1 − τ 2 )/(1 + τ 2 ). If
γ > maxi∈I3 1 − `2i then n(τ ) ∈ C 0 for each τ .
Let q0 (τ ) = −hΛP n(τ ), n(τ )i and for each i ∈ I3 , qi (τ ) = hn(τ ), (P Ωi )S n(τ )i.
These four functions are quartics in τ . If qi (0) > 0 and the quartic qi (τ ) = 0 has no
real roots, then qi (τ ) > 0 for all τ . We have thus shown:
Geometry of carrying simplices
Lemma 8 (Invariance of KP ) Let ` 0, and γ ∈ (maxi∈I3
and define the cone
16
p
1 − `2i , 1) be given
KP = {n ∈ R3 : hn, P ni ≥ 0, h`, ni ≥ 0}, P = ((`i `j )) − γ 2 I.
(26)
Define also n(τ ) via (25), q0 (τ ) = −hΛP n(τ ), n(τ )i, and qi (τ ) = hn(τ ), (P Ωi )S n(τ )i
for each i ∈ I3 , with each Ωi given by (20). Then if
qi (0) > 0 ∀i ∈ {0, 1, 2, 3} and none of the 4 quartics qi (τ ) have a real root
then KP is an invariant cone for the normal dynamics (6).
If (1) is the asymmetric May-Leonard system (2) then we have the simplification that
q0 ≡ 0.
Since each qi is a quartic, we may use explicit inequalities on the coefficients of
quartics (see Appendix B) to verify when all the qi have no real roots.
5.3. Conditions for KP ⊂ KL
We now seek a condition that the invariant cone KP lies within the cone KL , since
in that case det Θ ≥ 0. Recall that for n ∈ C 0 , by n1 we mean the vector with
components n1i for i ∈ I3 in turn. We have a means of ensuring that the surface
normal is constrained to a positive cone KP defined by a matrix P , and we have just
shown that when v = n1 is constrained to a second positive cone KL defined by a
matrix L the determinant det θ cannot change sign.
Lemma 9 (Condition that KP ⊂ KL ) Define
v(τ ) = (n2 (τ )n3 (τ ), n1 (τ )n3 (τ ), n1 (τ )n2 (τ ))T ,
where ni (τ ) are given by (25), and r(τ ) = hv(τ ), Lv(τ )i. If the degree 8 polynomial
r(τ ) has no real roots and r(0) > 0 then KP ⊂ KL .
Lemma 9 can be applied by using the Sturm theorem for roots of polynomials
(see Appendix A).
We also offer an alternative
test that KP ⊂ KL . Recall that %P (n) = hn, P ni
p
and that if γ > maxi∈I3 1 − `2i then %−1
P (0) ∩ C is the boundary of the cone KP .
If (p, q, 1) ∈ %−1
(0)
∩
C
then
s(p,
q,
1)
∈ %−1
P
P (0) ∩ C for any s > 0. Similarly
−1
−1
(u, v, 1) ∈ δL (0) ∩ C then s(u, v, 1) ∈ δL
(0) ∩ C for any s > 0. Therefore to
show KP ⊂ KL we only need show that
∀p, q ∈ R+ , %P (p, q, 1) ≥ 0 ⇒ δL (q, p, pq) ≥ 0.
(27)
We give an explicit calculation of this condition in Example 5 of section 7.
In Appendix B, lemma 10 gives conditions that the ellipse %P (p, q, 1) ≥ 0 lies
inside a rectangle B. With πK = {(u, v, 1) ∈ C : δL (v, u, uv) ≥ 0} we may simply
check that B ⊂ πK , and this is equivalent to checking whether four quartics have no
real roots.
6. Local geometry of Σ and global stability of an interior fixed point
We now demonstrate how to determine, for a given interaction matrix A, whether the
carrying simplex is convex, concave or saddle-like in a neighbourhood of an interior
fixed point. Then we indicate how the global stability of that interior fixed point
depends on the curvature of Σ.
Geometry of carrying simplices
17
In the following we assume that an interior fixed point p exists and that the
carrying simplex is at least C 2 in a neighbourhood of p. The eigenvalue in the direction
normal to the Σ at p is negative, so that from the Stable manifold theorem (see, for
example, [23]) if p is repelling in Σ then the unstable manifold through p is analytic
(because the Lotka-Volterra F is analytic) and of dimension 2.
Theorem 5 Suppose that the carrying simplex Σ of (1) is C 2 in a neighbourhood of
an interior fixed point p. If θ is the 2 × 2 square matrix at p defined by (18) then there
is a neighbourhood of p in which the surface Σ is
• Strictly convex if θ at p has two positive eigenvalues
• Strictly concave if θ at p has two negative eigenvalues
• Saddle-like if θ at p has eigenvalues of different sign.
Proof. Let p ∈ Σ0 be a fixed point of (1) with strongly-balanced tangent plane with
positive normal N ∗ . N ∗ is a positive left unit eigenvector of DF (p). We will use this
normal to find the steady matrix representation Ψ∗ of the 2nd fundamental form from
(9), via the formula
1
Θ∗
= − Θ∗ ,
Ψ∗ = − ∗
hN , DF (p)N ∗ i
λ0
where λ0 > 0 is the dominant eigenvalue of −DF (p). If θ has two negative eigenvalues
at p, it also has two negative eigenvalues in a small neighbourhood of p, and so Θ∗
has two positive eigenvalues in a neighbourhood of p. Hence, in that case, Ψ∗ has two
positive eigenvalues in a neighbourhood of p, so that the carrying simplex is locally
convex at p. The other cases are similar.
The method of the Split Lyapunov function as introduced by Zeeman and Zeeman
[37] enables a direct link to the geometry of the surface Σ near an interior fixed point
and the stability of the fixed point. Our matrix θ here plays the same role as the matrix
µ = (AH−1 )SR appearing in section 6 of [37]. Indeed, µ has two positive (negative)
eigenvalues if and only of θ has two positive (negative) eigenvalues. Theorem 6.7 of
[37] links positive eigenvalues of µ to global stability of an interior fixed point. In
this case the flow across the tangent plane to Σ at the fixed point is downwards, and
this results in local convexity of Σ. Similarly if θ has two negative eigenvalues Σ is
locally concave and finally if θ has eigenvalues of opposite sign it is locally saddle-like.
Similarly, a θ with two negative eigenvalues means that the flow across Σ is upwards
and results in a concave carrying simplex. Thus we obtain:
Corollary 6 Let Σ be the carrying simplex of (1). If θ is the 2 × 2 square matrix
defined by (18) then an interior fixed point p is
• globally attracting in C 0 if Σ near p is convex
• globally repelling in Σ0 if Σ near p is concave.
7. Example Applications
7.1. Example 1: A carrying simplex with curvature that changes sign
Consider system (1) with
1
A= ε
δ
ε
1
δ
δ
δ ,
1
1
b = 1 ,
1
(28)
Geometry of carrying simplices
18
where 0 < ε < 1 and 0 < δ < 1. It is shown in [36, Counterexample 6.1] that,
4
. We
although all the edges of Σ are concave, Σ is not globally concave if δ > 2 − 3+ε
4
consider the case where ε = 1/4 and δ = 3/4, so that the condition δ > 2 − 3+ε holds.
There is no interior fixed point, but there are boundary fixed points at (4/5, 4/5, 0)T ,
(4/7, 0, 4/7)T and (0, 4/7, 4/7)T . The boundary fixed point (4/5, 4/5, 0)T is globally
attracting on C 0 . With e1 = (1, 0, 0)T , e2 = (0, 1, 0)T and e3 = (0, 0, 1)T , we
find that the eigenvalues of the Jacobian at the axial fixed points e1 , e2 , e3 are
{−1, 3/4, 1/4}, {3/4, −1, 1/4}, {1/4, 1/4, −1} respectively. Hence each of the axial
fixed points ei has a 2-dimensional local unstable manifold Ui which is analytic because
the vector field for the flow is analytic. Moreover, each Ui ∩C ⊂ Σ, so that Σ is smooth
in a sufficiently small neighbourhood of each axial fixed point. Now let us consider
the sign of the curvature of Σ at each ei . The tangent planes at e1 , e2 , e3 have normals
(5/3, 5/21, 1)T , (5/21, 5/3, 1)T and (3/5, 3/5, 1)T . We find that
−36/5
9/2
−36/5 27/10
−5 5/2
θ(e1 ) =
, θ(e2 ) =
, θ(e3 ) =
9/2
−13/5
27/10 −4/5
5/2 −4/3
√
√
1
1
(−49 ± 2554) ≈ −9.95, 0.154, 10
(−40 ± 1753) ≈
with respective eigenvalues 10
√
−8.2, 0.19, and 16 (−19 ± 346) ≈ −6.27, −0.066. Consequently Ψ(ei ) is negative
definite for i = 3 and has eigenvalues of opposite sign when i ∈ I2 . By smoothness
near the axial fixed points we conclude that the second fundamental form of Σ is
negative definite sufficiently close to e3 where Σ is convex, but close to e1 , e2 where the
second fundamental form will have eigenvalues of opposite sign, Σ will have negative
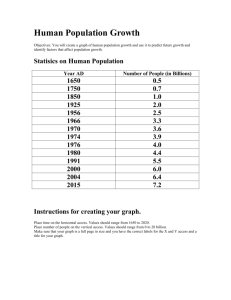
curvature (see figure 2).
Figure 2. Carrying simplex for which the curvature is not single-signed. Close to
e1 , e2 the curvature is negative (red, dark shading), but elsewhere it is nonnegative
(green, lighter shading).
7.2. Example 2: A family of convex or concave carrying simplices
Consider the asymmetric May-Leonard system (2) characterised by the interaction
matrix
1 α β
A = ε 1 β .
ε α 1
Geometry of carrying simplices
19
The matrix L of (14) is given by
0
2(α − 1)(ε − 1)
0
L = 2(α − 1)(ε − 1)
2(β − 1)(ε − 1) 2(α − 1)(β − 1)
2(β − 1)(ε − 1)
2(α − 1)(β − 1) .
0
Thus if
(α − 1)(ε − 1) ≥ 0 and (β − 1)(ε − 1) ≥ 0
(29)
then ∆L (N ) ≥ 0 for all unit vectors N ∈ C. Thus we have either a convex or concave
carrying simplex. Now apply Theorem 3 using for M0 the unit simplex in C which
has outward unit normal ι. Then at t = 0 the matrix θ in (18) is given by
2(α + ε − 2)
2 − 2α
θ=
.
2 − 2α
2(α + β − 2)
We find det θ = (α−1)(β−1)+(β−1)(ε−1)+(ε−1)(α−1) and Tr(θ) = 4α+2β+2ε−2.
If α, β, ε ≥ 1 then (29) is satisfied and Tr(θ) > 0 and so θ is positive definite. In this
case, by theorem 3 Σ is concave. On the other hand, if α, β, ε ≤ 1 then (29) is satisfied
and Tr(θ) < 0 and so θ is negative definite and Σ is convex.
7.2.1. Example 2: A convex carrying simplex We take
1
1/2 1/3
1
2/5 .
A = 3/4
3/5 2/7
1
The computed carrying simplex along with orbits converging to the unique interior
40 25 48 T
, 61 , 61 ) are shown in in the left plot of figure 3.
fixed point ( 61
Figure 3. Left: Example 2: Global convergence to a convex carrying simplex.
Right: Example 3: Concave carrying simplex.
2
Ω1 = 0
0
1/2 1/3
1/2
3/4
0 , Ω2 = 3/4
0
3/5
0
0 0
1/3 0 0
2 2/5 , Ω3 = 0 2/5 0 .
0 2/7
3/5 2/7 2
Geometry of carrying simplices
20
q
707
We now apply lemma 8 with ` = ι and γ = 1041
. Here we find
√
√
√
4
11452693 + 9935 354207 τ
25975180 3 + 21838 118069 τ 3
q1 (τ ) =
+
195062580
195062580
√ √
√
2
21838 118069 − 25975180 3 τ
12161107τ
11452693 − 9935 354207
+
+
+
32510430
195062580
√ √ 195062580
√
6190189 − 7097 354207 τ 4
83974 118069 − 72730504 3 τ 3
q2 (τ ) =
+
65020860
455146020
√
√
√
72730504 3 + 83974 118069 τ
4672159τ 2
6190189 + 7097 354207
+
+
+
10836810
√
√65020860
√ 455146020
4
32 590345 3 + 4 118069 τ 3
8922643 − 2960 354207 τ
−
q3 (τ ) =
48765645
341359515
√
√
√
32 590345 3 − 4 118069 τ
5296238τ 2
8922643 + 2960 354207
−
+
+
.
16255215
341359515
48765645
We now use the Sturm Theorem for counting roots of a polynomial (see Appendix
B), implemented in Mathematica as “CountRoots” to show that none of the qi , i ∈ I3
have real roots. Since each qi (0) > 0 we conclude via lemma 8 that the cone KP is
invariant under the normal dynamics (6). Moreover, for this interaction matrix,
9
151
29
− 400
280
100
9
143
− 196
L = 151
280
210
29
100
143
210
1
− 225
which gives
r(τ ) = ∆L (n(τ )) =
√
√
√
−26006502186 3 − 566662042 118069 τ 7
4804209544 + 1612281 354207 τ 8
+
122889425400
860225977800
√
√
√
129660606100 + 22571934 354207 τ 6
50386884123 3 + 642367033 118069 τ 5
+
+
860225977800
√
√430112988900
1284734066 118069 − 100773768246 3 τ 3
34821800351τ 4
+
+
107528247225
860225977800
√
√
√
129660606100 − 22571934 354207 τ 2
26006502186 3 − 566662042 118069 τ
+
+
860225977800
860225977800
√
33629466808 − 11285967 354207
+
860225977800
√
354207
has no real roots via the Sturm Theorem and r(0) = 33629466808−11285967
≈
860225977800
0.313 > 0, which shows that r(τ ) > 0 for all τ . Hence by lemma 9 det Θ > 0 for all t.
Finally, at t = 0
!
− 32 419
420
θ=
419
− 92
420
35
which has negative trace and hence by theorem 4 Σ is convex.
Geometry of carrying simplices
21
7.3. Example 3: A concave carrying simplex
The interaction matrix is given by
1
5/4 3/2
1
8/5 .
A = 7/5
11/10 3/2 1
interior fixed point at (2/11, 21/55, 5/22)T . For the Ωi we have:
5/4
3/2
5/4 0 0
3/2
0 0
, Ω2 = 7/5 2 8/5 , Ω3 = 0
7/5
0
8/5 0 .
0
11/10
0 0 3
11/10 3/2 2
q
37
As in the previous example we choose ` = ι, but now γ =
51 . The conditions
of lemma 8 are then satisfied and we have KP as an invariant cone for the normal
dynamics.
For the matrix L,
9
7
9
− 100
40
20
7
1
9
− 16
L = 40
,
40
There is an
2
Ω1 = 0
0
9
20
9
40
1
− 100
we find that r(0) > 0 and r(τ ) > 0 for all τ , so that by lemma 9 KP ⊂ KL . Finally,
at t = 0
!
13
− 23
10
20
θ=
11
− 23
20
5
which has positive trace, so that by theorem 4 Σ is concave.
7.4. Example 4: The Symmetric May-Leonard model
Here the competition model specialises to
ẋ1
ẋ2
ẋ3
= x1 (1 − x1 − αx2 − βx3 )
= x2 (1 − x2 − βx1 − αx3 )
= x3 (1 − x3 − αx1 − βx2 )
(30)
where α, β > 0. The steady states are (0, 0, 0)T , e1 , e2 , e3 , an interior steady state
1
T
1+α+β (1, 1, 1) , and when either α < 1, β < 1 or α > 1, β > 1 there are three more
1
1
1
steady states 1−αβ
(1 − α, 1 − β, 0)T , 1−αβ
(1 − β, 0, 1 − α)T and 1−αβ
(0, 1 − α, 1 − β)T .
Let us assume that α, β < 2 so that 1 is the dominant eigenvalue of −DF (e1 ) and
α(2−α)
T
a corresponding (right) eigenvector of DF (e1 )T is ( 2−α
β , β(2−β) , 1) 0. Similarly
β(β−2) 2−β
β
α
for points e2 , e3 we have eigenvectors ( α(α−2)
, α , 1)T and ( β−2
, α−2
, 1)T . The unit
T
right eigenvector of DF for the smallest eigenvalue at the interior fixed point is ι.
We take the cone KP to be an ellipsoidal cone subtending an angle cos−1 γ to `. The
Ωi are given by
2 α β
α 0 0
β 0 0
Ω1 = 0 β 0 , Ω2 = β 2 α , Ω3 = 0 α 0 .
0 0 α
0 0 β
α β 2
By symmetry, to find an invariant cone KP we need only apply lemma 8 for Ω1 .
For a given α, β we may use lemma 8 to find values of γ for which KP invariant.
Geometry of carrying simplices
22
Alternatively, we may fix γ and use lemma 8 to determine the convex region in α, βspace for which there is an invariant
cone. We chose to do the latter. In figure 4 we
q
show this region for γ = 21 (1 +
2
3 ).
2.0
1.5
1.0
0.5
0.0
0.0
0.5
1.0
1.5
2.0
Figure 4. Region of α, β q
space,
as calculated using lemma 8, for which KP is
2
1
1
+
.
2
3
invariant when γ =
Now let us examine the regions in C 0 for which θ at t = 0 is definite. In this
example L, as defined in (14), is given by
−(A + B)2
A2 + B 2
A2 + B 2
−(A + B)2
A2 + B 2 ,
L = A2 + B 2
A2 + B 2
A2 + B 2
−(A + B)2
and A = α − 1, B = 1 − β. Let γ > 0 be given and consider the √
circle of points
N = 1/v of unit modulus satisfying h1, N i = h1, v1 i = v11 + v12 + v13 = 3γ. Then
!2
2
3
3 X
X
X 1
X 1
1
1
2
3γ =
=
+2
=1+2
,
v
vi
vv
vv
i=1 i
i=1
i<j i j
i<j i j
so that
√
v1 + v2 + v3
3γ 2 − 1
=
, and
3γv1 v2 v3 = v1 v2 + v2 v3 + v3 v1 ,
2
v1 v2 v3
which gives 2(v1 + v2 + v3 ) = (3γ 2 − 1)v1 v2 v3 and
2
2
3γ − 1
2
2
2
v1 + v2 + v3 =
(v1 v2 v3 )2 − 2(v1 v2 + v2 v3 + v3 v1 )
2
2
2
√
3γ − 1
=
(v1 v2 v3 )2 − 2γ 3v1 v2 v3 .
2
But
δL (v) = −(A + B)2 (v12 + v22 + v32 ) + 2(A2 + B 2 )(v1 v2 + v2 v3 + v3 v1 )
√
√
(A + B)2 (3γ 2 − 1)2
= 2 3γ(A2 + B 2 ) + 2γ 3(A + B)2 − v1 v2 v3
4
Geometry of carrying simplices
23
so that δL (v) > 0 whenever
√
1
8 3γ((A2 + B 2 ) + (A + B)2 )
> v1 v2 v3 =
,
2
2
2
(A + B) (3γ − 1)
N1 N2 N3
that is, whenever
(A + B)2 (3γ 2 − 1)2
.
N1 N2 N3 > √
8 3γ((A2 + B 2 ) + (A + B)2 )
√
Now the set |N | = 1 and N1 + N2 + N3 = 3γ is parameterized by
p
√
1 − γ2
3 sin ϑ + 3 cos ϑ
γ
√
+√ ,
N=
3 2
3
!T
p
√
p
1 − γ2
3 sin ϑ − 3 cos ϑ
γ γ − 2 − 2γ 2 sin ϑ
√
√
+√ ,
3 2
3
3
and for such points
N1 N2 N3 =
5γ 3 +
√
3/2
2 1 − γ2
sin(3ϑ) − 3γ
√
6 3
which has the minimum value
!
r
√
3/2
5γ 3 − 2 1 − γ 2
− 3γ
2
√
> 0 if γ ∈
,1 ,
(31)
3
6 3
q q
1
2
2
so we require γ ∈
3 , 1 . Let us take γ = 2 1 +
3 , for which the inequality in
(31) becomes
√
√ √
3 6 2 + 3 (A + B)2
,
29 6 + 49 >
4 (A2 + AB + B 2 )
which expands to give
√
√
√ √
√
√ 196 − 18 2 − 3 3 + 116 6 A2 + 2 98 − 18 2 − 3 3 + 58 6 AB
√
√
√ + 196 − 18 2 − 3 3 + 116 6 B 2 ≥ 0.
This last expression is actually satisfied for all A, B ∈ R. Hence KP ⊂ KL . Finally,
at t = 0
2(α + β − 2) −α − β + 2
θ=
−α − β + 2 2(α + β − 2)
which shows, via theorem 4, that, for values of α, β in the parameter region where
there is an invariant cone, Σ is concave if α + β < 2, convex if α + β > 2. When
α + β = 2, it is easy to show that Σ is the unit simplex in C.
Geometry of carrying simplices
24
7.5. Example 5: A two-parameter competitive interaction model
Now consider the case where
1 α
A= β 1
β α
β
α .
1
Here we find from (20) that
2 α β
α
Ω 1 = 0 β 0 , Ω2 = β
0 0 β
0
0 0
β
1 α , Ω3 = 0
0 α
β
0
α
α
0
0 .
2
and δL (v) = −(A + B)2 v32 − 4AB(v1 v2 + v3 v1 + v1 v2 ). If α = β = 1, we
find that A = B = 0 and det Ψ = 0, and in fact Σ is the unit simplex in C.
Now consider the remaining possibilities. We consider only the case AB < 0.
Numerical evidence suggests that for AB > 0 the carrying simplex is saddle-like,
but we have not yet been able to prove this. We take ` = ι and the cone KP
2.0
1.5
1.0
0.5
0.0
0.0
0.5
1.0
1.5
2.0
Figure 5. Region of α, β space for example 2, as calculated using lemma 8,
for which
exists an invariant ellipsoidal cone for the surface normal when
q there
2
1
γ = 2 1 + 3 . The region is the intersection of the interiors of each region
inside the 3 curves.
to be an ellipsoidal cone subtending
an angle
γ to `. We find that δL (y, x, xy) =
−xy y x(A + B)2 + 4AB + 4AB(x + 1) and δL = 0 on
y(x) = −
4AB(x + 1)
.
x(A + B)2 + 4AB
The denominator vanishes when AB < 0 at x∗ = −4AB/(A + B)2 > 0. Moreover,
y → x∗ as x → ∞, so that, by symmetry we conclude that δL ≥ 0 if (x, y) ∈ [0, x∗ )2 .
Geometry of carrying simplices
25
Now use lemma 10 from the Appendix to see that the ellipse %P (x, y, 1) = 0 is bounded
by
p
1 ± 3(1 − γ 2 )(3γ 2 − 1)
X± = Y± =
.
3γ 2 − 2
Hence, using (27), KP is contained in KL if 0 ≤ X− and X+ < x∗ , that is
p
1 + 3(1 − γ 2 )(3γ 2 − 1)
4AB
.
<−
3γ 2 − 2
(A + B)2
q With γ = 12 1 + 23 this reads
p √
4 + 12 6 − 17
√
< −4AB/(A + B)2 .
(32)
2 6−3
For example, by inspection of figure 5, the
q α = 3/5, β = 4/5 (A = −2/5,
point
B = 1/5) has an invariant cone when γ =
1
2
1+
2
3
, and x∗ = −4AB/(A+B)2 = 8,
√
2
3−3)γ +1
so that (32) holds and KP ⊂ KL . Moreover at t = 0 det θ > (16 3γ
> 0,
2 −1
and since α, β < 1, θ has negative trace and so by theorem 4 Σ is concave. On
the other hand the point α = 5/4, β = 3/2 (A = 1/4, B = −1/2) we also have
−4AB/(A + B)2 = 8, but now at t = 0 det θ > 0 and θ has positive trace, so that Σ
is concave. The results are summarised in figure 6.
Figure 6. From left to right: computed carrying simplex in Example 2 for
(α, β) = (5/4, 3/2), (3/5, 4/5), (3/5, 5/4), with concave, convex and saddle-like
carrying simplices respectively.
8. Discussion and Outlook
In this paper we have developed methods for studying the geometry of the carrying
simplex for totally competitive 3-species Lotka-Volterra systems. Our method involves
following the changing curvature of the image of a strongly balanced plane under the
totally competitive flow. In a limited set of cases, convexity or concavity of the carrying
simplex can be established without detailed knowledge of the Gaussian images of the
evolving surface, but in general our method requires being able to confine the Gaussian
images inside a suitable convex cone. The method works through establishing that
the rate of change of the matrix representation of the second fundamental form is
either positive or negative definite. If this can be done then theorem 4 shows that
Geometry of carrying simplices
26
the carrying simplex is concave(convex) if the initial rate of change of the second
fundamental form is (positive)negative definite.
We have also shown that the geometry of the unique carrying simplex of a totally
competitive Lotka-Volterra system can be linked to the stability of an interior fixed
point. There is a connection between our work and the Split Lyapunov method
introduced by Zeeman and Zeeman [37]. In the Split Lyapunov Method, the method
works when it can be shown that all interior orbits eventually end up in a half space
defined as the region above or below the tangent plane Tp Σ to Σ through the interior
fixed point p. Once in the half-space there is a Lyapunov function that shows global
attraction or repulsion around p. If all trajectories cross Tp Σ in one direction, then
if one follows the evolution of Tp Σ under the flow ϕt , this means that the surface
ϕt (Tp Σ) bends below or above Tp Σ. Since the Lotka-Volterra vector field is quadratic,
the bent surface is convex, concave or saddle-like for small enough time. We have
shown that the bending of planes depends on the direction of the plane’s normal,
and that provided the Gaussian image S(Mt ) of the evolving surface is confined to
a suitable subset of C = R3+ , the evolving surface remains either convex or concave
for all time and hence also in the limit. If Σ is convex(concave) near an interior fixed
point, that interior fixed point must be globally repelling(attracting), but when Σ is
saddle-like there may be global repulsion or attraction, or there may exist periodic
orbits. More work is needed to determine when Σ is saddle-like and how the geometry
of Σ relates to local and global stability in the saddle case. Most of the methods
outlined in the paper can be extended to work for totally competitive Lotka-Volterra
systems for more than 3 species.
Our numerical simulations suggest that carrying simplices exist outside the classes
of totally competitive or type-K competitive systems. In figure 7 we give 3 examples
of non-competitive systems that have carrying simplices. The surfaces were computed
by solving the quasilinear pde (5) in polar coordinates. The use of polar coordinates
simplifies the imposition of boundary conditions and also enables the computation
of surfaces that do not project in a 1-to-1 way onto the faces of the first quadrant.
It is clear that in the first example the curvature must change sign since there are
regions where Σ is convex and others where Σ is concave. In future work we will seek
conditions for existence of such carrying simplices, extend methods to deal with the
saddle case and also investigate smoothness of Σ by using that it is the limit of smooth
surfaces, where often strong properties of each surface’s curvature can be established.
Acknowledgments
I wish to acknowledge useful discussions with Dr Zhanyuan Hou and also the valuable
suggestions of the anonymous referee.
References
[1] Aliluiko, A M & Mazko, O H 2006 Invariant cones and stability of linear dynamical systems
Ukran. Math. J. 58(11) 1635–55
[2] Baigent, S 2012 Convexity-preserving flows of the competitive planar Lotka-Volterra equations
Proc. Ed. Math. Soc. 55 53–63
[3] Baigent, S & Hou, H 2012 On the global stability of fixed points for Lotka-Volterra systems Diff.
Eq. Dyn. Sys. 20(1) 53–66
Geometry of carrying simplices
27
Figure 7. Numerical simulations show that there are carrying simplices
outside the class of totally competitive systems (and the type-K competitive
T
systems studied
Parameters
b = (1, 1, 1) ,and left to
by Liang & Jiang.)
1
1/2
right: (i) A =
1
1
0
1
1
1
2
.
3
−1/2
−1/2
1
1
−1
−0.5
1
, (ii) A =
1
1
1/2
2
1
1/2
−1/2
−1/2
1
, (iii) A =
1
[4] Berman, A & Plemmons R J. 1994 Nonnegative matrices in the mathematical sciences (Classics
in Applied Mathematics 9) (Philadelphia: Society for Industrial and Applied Mathematics)
[5] Chi, C-W Hsu, S-B & Wu, L-I 1998 On the asymmetric May-Leonard model of three competing
species. SIAM. J. Appl. Math. 58(1) 211–226
[6] Gyllenberg, M & Wang, Y 2004 Dynamics of the Periodic Type-K Competitive Kolmogorov
Systems J. Diff. Eqns 205 50–76
[7] Hadamard, J 1901 Sur L’iteration et les solutions asymptotiques des equations differentielles
Bull. Soc. Math. France 29 224–28
[8] Hirsch, M W 1988 Systems of differential equations that are competitive or cooperative III:
competing species Nonlinearity 1 51–71
[9] Hirsch, M W & Smith, H L 2006 Monotone dynamical systems (In Handbook of differential
equations: ordinary differential equations. 2 239–357 (Elsevier B. V. :Amsterdam)
[10] Hirsch, M W 2008 On existence and uniqueness of the carrying simplex for competitive dynamical
systems. J. Biol. Dyn 2(2) 169–179
[11] Hofbauer, J & Sigmund, K 1988 The Theory of Evolution and Dynamical Systems (New York:
Cambridge University Press)
[12] Hou, Z & Baigent, S 2011 Fixed Point Global Attractors and Repellors in Competitive LotkaVolterra Systems Dyn. Sys. 26(4) 367–90
[13] Jiang, J., Mierczyński, J., Wang, Y 2009 Smoothness of the carrying simplex for discrete-time
competitive dynamical systems: a characterization of neat embedding J. Diff Eqns 246(4)
1623–72
[14] LaMar, M D & Zeeman M L CSimplex, a Geomview Module for Visualizing the Carrying Simplex of a Competitive Lotka-Volterra System. http://www.people.wm.edu/ mdlama/page3/page3.html
[15] Levy, S, Munzner, T, Phillips M Geomview, The Geometry Center, Minneapolis, MN, 1996,
http://www.geom.umn.edu
[16] Liang, X & Jiang, J 2003 The dynamical behavior of Type-K competitive Kolmogorov systems
and its application to 3-dimensional Type-K competitive Lotka-Volterra systems Nonlinearity
16 785–801
[17] Liang, X & Jiang, J 2002 The classification of the dynamical behaviour of n-dimensional type
K monotone Lotka-Volterra systems Nonlinear. Anal. 51 749–63
[18] May R M & Leonard W J 1975 Nonlinear Aspects of Competition Between Three Species SIAM
J. Appl. Math 29(2) 243–253
[19] McShane, E J 1934 Extension of range of functions Bull. Amer. Math. Soc. 40 837–842
[20] Mierczyński, J 1999 Smoothness of unordered curves in two-dimensional strongly competitive
systems Appl. Math. (Warsaw) 25 449–55
[21] Mierczyński, J 1999 Smoothness of carrying simplices for three-dimensional competitive systems:
a counterexample Dyn. Cont. Discr. Impul. Sys 6 147–54
Geometry of carrying simplices
28
[22] Ortega, R & Sánchez, L A 2000 Abstract competitive systems and orbital stability Proc. Am.
Math. Soc. 128(10) 2911–19.
[23] Perko, L 2001 Differential Equation and Dynamical Systems (Texts in Applied Mathematics 7)
(Springer-Verlag: NewYork)
[24] Rockafellar, R T 1996 Convex Analysis. Princeton Landmarks in Mathematics & Physics 28
(Princeton University Press: Princeton)
[25] Smith, H L 1995 Monotone dynamical systems: An introduction to the theory of competitive
and cooperative systems (Mathematical Surveys and Monographs, 41, Amer. Math. Soc.,
Providence, RI)
[26] Stern, R & Wolkowicz, H 1991 Exponential nonnegativity on the ice cream cone SIAM J. Matrix
Anal. Appl. 12 160–5
[27] Takàč, P 1990 Convergence to Equilibrium on Invariant d-Hypersurfaces for Strongly Increasing
Discrete-Time Semigroups J. Math. Anal. Appl. 148 223–44
[28] Takeuchi, Y 1996 Global Dynamical Properties of Lotka-Volterra Systems (World Scientific:
Singapore)
[29] Temam, R 1997 Infinite Dimensonal Dynamical Systems in Mechanics and Physics, 2nd ed.
(Springer-Verlag:New York)
[30] Tineo, A 2001 On the convexity of the carrying simplex of planar lotka-volterra competitive
systems.Appl. Math. Comp 123(1) 93–108
[31] Tineo, A 2008 May Leonard systems. Nonlinear Anal. RWA 9(4) 1612–18
[32] Wang, Y & Jiang, J 2002 Uniqueness and attractivity of the carrying simplex for discrete-time
competitive dynamical systems J. Diff Eqns 186(2) 611–32
[33] Wang, F & Qi, L 2005 Comments on “Explicit Criterion for the Positive Definiteness of a General
Quartic Form” IEEE Trans Auto Control 50(5) 416–18
[34] Webster, R 1994 Convexity. (Oxford:OUP)
[35] Zalgaller V A 1992 Geometry III: Theory of Surfaces. Encyclopedia of Mathematical Sciences
48 (Springer-Verlag: Berlin)
[36] Zeeman, E C & Zeeman, M L 2002 An n-dimensional Lotka-Volterra system is generically
determined by the edges of its carrying simplex Nonlinearity 15 2019–32
[37] Zeeman, E C & Zeeman, M L 2003 From local to global behavior in competitive Lotka-Volterra
systems Trans. Amer. Math. Soc. 355 713–34
[38] Zeeman, E C & Zeeman, M L 1994 On the convexity of carrying simplices in competitive lotkavolterra systems. In Differential equations, dynamical systems and control science volume
152 of Lecture notes in Pure and applied Mathematics 353–64 (Dekker: New York)
[39] Zeeman, E C. 2002 Classification of quadratic carrying simplices in two-dimensional competitive
lotka-volterra systems Nonlinearity 15 1993–2018
Appendix A. Sturm theorem for counting roots of a polynomial
Let p be a polynomial of positive degree n with real coefficients. Define the sturm
chain of polynomials fi , i ∈ Im by f0 = p, f1 = p0 , f2 = −rem(f0 , f1 ) = f1 q0 − f0 ,
f3 = −rem(f1 , f2 ) = f2 q1 − f1 , · · ·, 0 = −rem(fm−1 , fm ) = fm qm−1 − fm−1 , where
the degree of fm is zero if p has no repeated root.
For a given sturm sequence fi , i ∈ Im we denote by Vx the number of sign changes
in the sequence {f0 (x), f1 (x), . . . , fm (x)}, where zeroes are not counted.
Theorem 6 (Sturm) Let p be a polynomial with sturm chain fi , i ∈ Im . Let
[a, b] ⊂ R be an interval for which neither of a nor b are roots or multiple roots
of p. Then the number of distinct real roots of p in [a, b] is Va − Vb .
Appendix B. Necessary and sufficient condition for a quartic to have no
real roots
Consider the quartic f (x) = a0 x4 + 4a1 x3 + 6a2 x2 + 4a3 x + a4 where ai ∈ R, i ∈ I5 .
Define the following:
G = a20 a3 − 3a0 a1 a2 + 2a31 , H = a0 a2 − a21 , I = a0 a4 − 4a1 a3 + 3a22
Geometry of carrying simplices
29
and
a0
J = a1
a2
a1
a2
a3
a2
a3
a4
, K = 12H 2 − a20 I, ∆ = I 3 − 27J 2 .
Then according to [33]
Theorem 7 If a0 > 0 then f (x) = 0 has no real roots if and only if
(i) ∆ = 0, G = 0, K = 0 and H > 0;
OR
(ii) ∆ > 0 and
(a) H ≥ 0;
OR
(b) H < 0 and K < 0.
The final lemma provides a box which bounds the ellipse given by %P (y, x, xy) = 0.
2
Lemma 10 Let P be a symmetric matrix
p with i, jth element pij = `i `j − δij γ where
P3
2
2
1 − `i , and suppose that P has 2 negative
i=1 `i = 1 and 1 > γ > maxi∈I3
eigenvalues and one positive eigenvalue. Define p : R2+ → R by p(x, y) = %P (x, y, 1).
Then p−1 (0) is an ellipse E and E is contained in the box B with corners (X+ , Y+ ),
(X− , Y− ), (X+ , Y− ), (X− , Y+ ) where
p
`1 `3 ± (1 − γ 2 ) (γ 2 − `22 )
,
X± =
(γ 2 − `21 − `22 )
p
`2 `3 ± (1 − γ 2 ) (γ 2 − `21 )
Y± =
.
(γ 2 − `21 − `22 )
2
Proof. It is easy to compute that
p p(x, y) = %P (x, y, 1) = (`1 x + `2 y + `3 ) −
2
2
2
−1
2
γ x + y + 1 . If γ > maxi∈I3 1 − `i , then p (0) is an ellipse E and the set
of points p−1 (≥ 0) is the interior of E. The ellipse E is contained in the box B with
corners (X+ , Y+ ), (X− , Y− ), (X+ , Y− ), (X− , Y+ ) obtained by computing where E goes
vertical or horizontal. Let y = y(x) be a local description of the ellipse near where its
tangent is vertical. Then
(`1 x + `2 y(x) + `3 )2 − γ 2 x2 + y(x)2 + 1 = 0,
(B.1)
so that
2(`1 + `2 y 0 (x))(`1 x + `2 y(x) + `3 ) − γ 2 (2x + 2y(x)y 0 (x)) = 0.
At points where y 0 = 0, we have
2`1 (`1 x + `2 y(x) + `3 ) − 2γ 2 x = 0,
1 `2 y(x)
which can be rearranged to give x = `1 `3(γ+`
. Substituting this last expression in
2 −`2 )
1
(B.1) we obtain
!
2
2
`1 `3 + `1 `2 y(x)
`
`
+
`
`
y(x)
1
3
1
2
`1
+ `2 y(x) + `3
= γ2
+ y(x)2 + 1
(γ 2 − `21 )
(γ 2 − `21 )
Solving this last quadratic for y(x) gives the desired values of Y± and the calculation
for X± is similar.