HETEROCLINIC LIMIT CYCLES IN COMPETITIVE KOLMOGOROV SYSTEMS Zhanyuan Hou Stephen Baigent
advertisement

Manuscript submitted to
AIMS’ Journals
Volume X, Number 0X, XX 200X
Website: http://AIMsciences.org
pp. X–XX
HETEROCLINIC LIMIT CYCLES IN COMPETITIVE
KOLMOGOROV SYSTEMS
Zhanyuan Hou
School of Computing, London Metropolitan University,
166-220 Holloway Road, London N7 8DB, UK.
Stephen Baigent
Department of Mathematics, UCL, Gower Street, London WC1E 6BT, UK.
Abstract. A notion of global attraction and repulsion of heteroclinic limit
cycles is introduced for strongly competitive Kolmogorov systems. Conditions
are obtained for the existence of cycles linking the full set of axial equilibria
and their global asymptotic behaviour on the carrying simplex. The global
dynamics of systems with a heteroclinic limit cycle is studied. Results are also
obtained for Kolmogorov systems where some components vanish as t → ±∞.
1. Introduction. Consider the Kolmogorov system
x0i = xi fi (x),
T
RN
+
i ∈ IN := {1, 2, . . . , N }, x ∈ RN
+,
N
(1)
1
where f = (f1 , . . . , fN ) :
→ R is at least C . Since we are mainly dealing
with a special class of system (1) that are strongly competitive (to be explained
below), we assume that fi (0) > 0 for i ∈ IN so that the origin is a repeller. Let
ei = (0, . . . , 1, . . . , 0)T , where the ‘1’ is in the ith position. We also assume that
fi (ei ) = 0 so that ei is an axial fixed point for each i ∈ IN . Moreover, e1 , . . . , eN
are assumed to be the only axial fixed points. We restrict the study of (1) to the
N
N
invariant sets RN
: ∀i ∈ IN , xi ≥ 0}, its interior intRN
+ = {x ∈ R
+ = {x ∈ R+ :
N
N
N
∀i ∈ IN , xi > 0} and its boundary ∂R+ = R+ \ intR+ .
Heteroclinic cycles occur in many dynamical systems that are models of physical
or biological systems (for example [2, 6, 17]). For general dynamical systems with
symmetry, a theory for asymptotic stability, structural stability and various bifurcations of heteroclinic cycles have been established (see, for example, [9] and the
more recent paper by the same authors [10] and references therein). Some of the
deep results established for systems with symmetry can also be applied to systems,
such as (1), that do not possess symmetry (for example, see remark 2.8 of [9]).
However, we have not been able to find results for global stability of heteroclinic
cycles for either of the symmetry or non-symmetric cases.
We denote the solution of a system with the initial condition x(0) = x0 by
x(t, x0 ) and define its α-limit set, ω-limit set by α(x0 ) = ∩T ≤0 {x(t, x0 ) : t ≤ T },
ω(x0 ) = ∩T ≥0 {x(t, x0 ) : t ≥ T } respectively, where the overline denotes set closure.
2000 Mathematics Subject Classification. Primary: 34C37, 37C29; Secondary: 34D05, 34D45,
37C70.
Key words and phrases. Kolmogorov systems, Lotka-Volterra systems, global attractors, global
repellers, heteroclinic limit cycles.
1
2
ZHANYUAN HOU AND STEPHEN BAIGENT
Here we are concerned with heteroclinic cycles of (1) and in particular when they
attract or repel certain subsets of RN
+ . By a heteroclinic cycle we mean a closed
curve that is topologically a circle consisting of fixed points pi for i ∈ Im , m ≥ 2
together with heteroclinic trajectories Ti that connect pi to pi+1 (here pm+1 = p1 ).
By a heteroclinic limit cycle Γ we mean a heteroclinic cycle Γ with an attracting (or
N
0
repelling) neighbourhood N (Γ) (restricted to intRN
+ or R+ ) such that ω(x ) = Γ
0
0
(or α(x ) = Γ) for all x ∈ N (Γ). The main issue we address here is when the
heteroclinic cycle is globally attracting or repelling (in some sense defined below).
Whereas it is straightforward to define global stability for a heteroclinic limit cycle,
to define global repulsion is intricate as it is not simply by reversing the time in
intRN
+ . Our approach here is restricted to strongly competitive (1), where it is
known that all limit sets belong to an invariant hypersurface known as the carrying
simplex.
∂fi
< 0 for all
Strongly competitive Kolmogorov systems are characterised by ∂x
j
i, j ∈ IN . For such systems the results of Hirsch [11] guarantee the existence of a
carrying simplex, a Lipschitz invariant manifold Σ of dimension N − 1 that attracts
all of RN
+ \ {0} as t → +∞. Moreover, it is known that every trajectory of (1)
in RN
+ \ {0} is asymptotic to one in the carrying simplex Σ as t → +∞. We
are concerned with the global dynamics of the system when it has an attracting
(repelling) heteroclinic limit cycle in the carrying simplex Σ. When N = 3, it is
known that the dynamics on Σ is topologically equivalent to that of a planar system.
Strongly competitive Lotka-Volterra systems are a subclass of these systems, for
which each fi is a linear function, so that they assume the form
x0i = ri xi (1 − Ai x),
i ∈ IN ,
(2)
where Ai = (ai1 · · · aiN ) is the ith row of a matrix A = (aij ) and the ri and aij are
positive constants with aii = 1.
A well-known and illustrative example of (2) is the May-Leonard [16] system
x01
x02
x3
= x1 (1 − x1 − α1 x2 − β1 x3 ),
= x2 (1 − β2 x1 − x2 − α2 x3 ),
= x3 (1 − α3 x1 − β3 x2 − x3 )
(3)
with 0 < αi < 1 < βi for i ∈ I3 . This was first studied for the case αi = α, βi = β in
[16]. The more general model has been treated in [5] and [27]. Hirsch’s results show
that this strongly competitive system has a 2-dimensional carrying simplex Σ and
that all points except the origin are attracted onto it. For the present parameter
ranges Σ contains 3 axial fixed points plus a unique interior fixed point p. In [5]
Q3
Q3
it was shown that when i=1 (1 − αi ) > j=1 (βj − 1) the interior fixed point p is
globally asymptotically stable and there is a heteroclinic cycle Γ0 such that α(x0 ) =
Q3
Q3
Γ0 for all x0 ∈ intΣ \ {p}, and that when i=1 (1 − αi ) < j=1 (βj − 1) the interior
fixed point is globally repelling on Σ and ω(x0 ) = Γ0 for all x0 ∈ intΣ \ {kp : k > 0}.
The heteroclinic cycle is e1 → e3 → e2 → e1 , and is reversed if 0 < βi < 1 < αi and
the same other conditions hold.
Hofbauer and Sigmund partially extended these results to the more general LotkaVolterra system
x01
x02
x3
= r1 x1 (1 − x1 − α2 x2 − β3 x3 ),
= r2 x2 (1 − β1 x1 − x2 − α3 x3 ),
= r3 x3 (1 − α1 x1 − β2 x2 − x3 )
(4)
HETEROCLINIC LIMIT CYCLES
3
with ri > 0 and βi < 1 < αi (the βi are not constrained to be positive) [12].
They proved that (4) is permanent (i.e. ∃M0 > 0, M1 > 0 such that all solutions
in intRN
+ satisfy M0 < xi (t) < M1 for all i ∈ I3 and large t) if det A > 0 and
Q3
Q3
Q3
Q3
i=1 (αi − 1) <
j=1 (1 − βj ), and that if
i=1 (αi − 1) >
j=1 (1 − βj ) then (4)
has a (locally) attracting heteroclinic cycle e1 → e2 → e3 → e1 . Necessary and
sufficient conditions for global stability or repulsion on Σ are, to the best of our
knowledge, not known.
For the N -dimensional system (2) with
∀i ∈ IN , ∀k ∈ IN \ {i, i + 1}, ri = 1, a(i+1)i < 1, aki > 1,
(5)
where N + 1 = 1 (mod N ), using Poincaré maps Afraimovich et al. [1] showed that
the heteroclinic cycle Γ0 : e1 → e2 → · · · → eN → e1 connecting the N axial fixed
points is stable in the sense that limt→+∞ dist(x(t, x0 ), Γ0 ) = 0 when x0 is in a
neighborhood U of Γ0 in intRN
+ , provided that
Ω(A) :=
N
Y
ai(i+1) − 1
i=1
1 − a(i+1)i
> 1.
Indeed, an earlier result dealing with more general systems was given by Feng [7].
For (2) satisfying
∀i ∈ IN , ∀j ∈ IN \ {i, i + 1}, aji > 1, 0 < a(i+1)i < 1
or
∀i ∈ IN , ∀j ∈ IN \ {i − 1, i}, aji > 1, 0 < a(i−1)i < 1,
where N = 0 and N + 1 = 1 (mod N ), a sufficient condition similar to the one given
in [1] was provided in [7] for the stability of the heteroclinic cycle Γ0 . Based on the
result given in [1], Hsu and Roeger [15] also obtained conditions for existence and
stability of a heteroclinic cycle in a chemostat model.
Following remark 2.8 of [9], which deals principally with heteroclinic cycles in
systems with symmetry but also includes results non-symmetric systems, all of the
above examples can also be treated using Theorem 2.7 of that same paper.
Hofbauer gives a concise way of analysing heteroclinic cycles in ecological systems
via a characteristic matrix [13] based upon average Lyapunov functions, which are
particularly well-suited to ecological systems. Field and Swift [8] use Poincaré maps
and transition matrices to study 4 dimensional system with symmetry. Let Γ be
a heteroclinic cycle consisting of fixed points ωk , k = 1, . . . , m, and lying in ∂RN
+.
Then Hofbauer constructs the m × N characteristic matrix C with cij = fj (ωi ) if
xi = 0 at ωj and cij = 0 if xi > 0 at ωj . Let us introduce the standard notation:
For any two vectors p and q, p q (p q) means that pi > qi (pi < qi ) for each
i ∈ IN . Then, (a) if there is an h 0 such that Ch 0 then ∂RN
+ is repelling
N
(i.e. trajectories in intRN
move
away
from
∂R
)
near
Γ;
(b)
if
Γ
is
asymptotically
+
+
stable in ∂RN
+ , and there is an h 0 such that Ch 0, then Γ is asymptotically
stable in RN
+ . For example, for the system (4) we obtain (up to multiplication by a
permutation matrix)
0
r2 (1 − β1 ) r3 (1 − α1 )
0
r3 (1 − β2 ) .
C = r1 (1 − α2 )
r1 (1 − β3 ) r2 (1 − α3 )
0
4
ZHANYUAN HOU AND STEPHEN BAIGENT
With h = (h1 , h2 , h3 )T we obtain
r2 (1 − β1 )h2 + r3 (1 − α1 )h3
Ch = r1 (1 − α2 )h1 + r3 (1 − β2 )h3 .
r1 (1 − β3 )h1 + r2 (1 − α3 )h2
Q3
Then it can be shown that there is a h 0 with Ch 0 if and only if i=1 (αi −1) <
Q3
Q3
(1 − βj ), whereas there is a h 0 with Ch 0 if and only if i=1 (αi − 1) >
Qj=1
3
j=1 (1 − βj ). The other examples listed above may also be studied using their
characteristic matrices.
We observe that in all these examples and to the best of our knowledge elsewhere
in the literature, the concept of stability of a heteroclinic cycle deals only with the
local behaviour near this cycle. We also notice that the stability concept of a
heteroclinic cycle is distinct from the concept of attracting or repelling heteroclinic
limit cycle.
Definition 1.1. We say that a heteroclinic cycle Γ0 of (1) is a
• locally attracting (repelling) heteroclinic limit cycle if there is a neighbourhood
0
0
0
V ⊂ intRN
+ of Γ0 such that ω(x ) = Γ0 (α(x ) = Γ0 ) for all x ∈ V ;
0
• globally attracting (repelling) heteroclinic limit cycle if ω(x ) = Γ0 (α(x0 ) =
0
Γ0 ) for all x0 ∈ intRN
+ \ U (x ∈ intΣ \ U ), where U is a union of a finite
number of manifolds of dimension lower than N (N − 1) and the set of fixed
points.
In summary, our main interest is in the global dynamics of the strongly competitive system (1). Even if we know the existence and local stability (repulsion)
of a heteroclinic cycle and the local behaviour near each fixed point, the global
dynamics could still be very complicated and not deducible from knowledge of this
local stability. For example, even for N = 3, an unstable interior fixed point and
an unstable heteroclinic cycle could contain many (but finite in number) nested
limit cycles [23]. Possibilities of complicated behaviour (for N ≥ 4) includes the
existence of a strange attractor within Σ, chaotic behaviour, and so on. In some
circumstances, however, it is also possible that the global dynamics is not so complicated and the global behaviour is simply an extension of local behaviour, e.g. a
locally attracting (repelling) heteroclinic cycle is actually globally attracting (repelling). In this paper, instead of tackling the complexity of the global dynamics,
we aim at excluding the possibility of complicated global behaviour by exploring
conditions under which (1) has a globally attracting (repelling) heteroclinic limit
cycle.
We denote the ith coordinate plane by πi = {x ∈ RN
+ : xi = 0} and the ith
nullcline by γi = {x ∈ RN
:
f
(x)
=
0}.
A
set
S
is
said
to be below (above) γi if
i
+
fi (x) ≥ 0 (≤ 0) for all x ∈ S, and strictly below (strictly above) γi if fi (x) > 0 (< 0)
for all x ∈ S.
Most of the results presented in this paper for attracting heteroclinic limit cycles
are parallel to those for repelling heteroclinic limit cycles. To save some space,
we adopt the style of merging the parallel statements into one with one set of the
parallel words in brackets, e.g. “attracting (repelling)”.
2. Heteroclinic limit cycles in three-dimensional systems. In this section,
we consider system (1) with N = 3:
x0i = xi fi (x), i ∈ I3 .
(6)
HETEROCLINIC LIMIT CYCLES
5
Assuming that there is a unique interior globally attracting (repelling on Σ) fixed
point, we explore necessary as well as sufficient conditions for (1) to have a globally
repelling (attracting) heteroclinic limit cycle, as defined by Definition 1.1.
We emphasize that when we say p ∈ intΣ is globally attracting (repelling) we
mean relative to intΣ. However, when p ∈ intΣ is globally attracting relative to
intΣ, it is also globally attracting relative to intRN
+.
Theorem 2.1. Suppose that the Kolmogorov system (6) has a finite number of fixed
∂f
points and is strongly competitive: ∂x
0 for x ∈ R3+ with xi > 0. Assume that
i
∂Σ is a heteroclinic limit cycle. Then, with 4 = 1 (mod 3) and 5 = 2 (mod 3), we
have either (7) or (8):
∀i ∈ I3 ,
∀i ∈ I3 ,
γi ∩ πi+2 is below γi+1 ∩ πi+2 ,
γi ∩ πi+2 is above γi+1 ∩ πi+2 .
(7)
(8)
Moreover, with E = {e1 , e2 , e3 }, if q ∈ ∂Σ \ E is a fixed point, then, for any j ∈ I3 ,
qj = 0 implies fj (q) = 0.
Proof. Suppose neither (7) nor (8) holds. Then there are only the following two
cases:
(i) For some distinct i, j ∈ I3 , γi ∩ πi+2 is below γi+1 ∩ πi+2 but γj ∩ πj+2 is above
γj+1 ∩ πj+2 .
(ii) For some i ∈ I3 , γi ∩ πi+2 is neither below nor above γi+1 ∩ πi+2 .
In case (i), by a permutation of (1, 2, 3) if necessary, we may assume that γ1 ∩ π3
is below γ2 ∩ π3 but γ2 ∩ π1 is above γ3 ∩ π1 . Since (6) has only a finite number of
fixed points, a phase portrait on π3 shows that the flow direction on π3 ∩ Σ is from
e1 to e2 whereas a phase portrait on π1 shows that the flow direction on π1 ∩ Σ is
from e3 to e2 , a contradiction to ∂Σ being a heteroclinic cycle.
In case (ii), we may assume that there are x, y ∈ γ1 ∩ π3 with x1 < y1 such that
f2 (x) < 0 but f2 (y) > 0. Since (6) has only a finite number of fixed points and
f is continuous, there is a q ∈ γ1 ∩ γ2 ∩ π3 with q1 > 0 and q2 > 0 such that for
z ∈ γ1 ∩ π3 close enough to q, f2 (z) < 0 if z1 < q1 but f2 (z) > 0 if z1 > q1 . Then a
phase portrait on π3 shows that q is a saddle point, a contradiction to ∂Σ being a
heteroclinic cycle.
The above contradictions confirm that either (7) or (8) holds.
If q ∈ ∂Σ \ E is a fixed point such that qj = 0 but fj (q) 6= 0 for some j ∈ I3 , then
fj (q) is an eigenvalue of the linearised system at q with an eigenvector pointing to
or from intR3+ so there is a point x0 ∈ intR3+ such that α(x0 ) = {q} or ω(x0 ) = {q}.
This contradicts the assumption that ∂Σ is a heteroclinic limit cycle. Therefore,
qj = 0 must imply fj (q) = 0.
Corollary 1. Assume that the Lotka-Volterra system (2) with N = 3 has a finite
number of fixed points and that ∂Σ is a heteroclinic cycle. Then we have either (9)
or (10):
∀i ∈ I3 ,
∀i ∈ I3 ,
γi ∩ πi+2 \ E is strictly below γi+1 ∩ πi+2 \ E,
γi ∩ πi+2 \ E is strictly above γi+1 ∩ πi+2 \ E.
Moreover, e1 , e2 and e3 are the only fixed points on ∂Σ.
The following lemma will be required in the sequel:
(9)
(10)
6
ZHANYUAN HOU AND STEPHEN BAIGENT
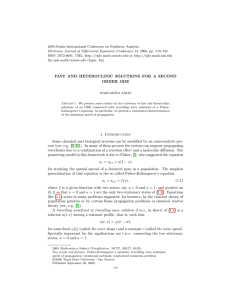
e3
s
A
A
A
T3 AT2
A
A
A
s
AUs
e1
T1
e2
(a)
e3
s
AK
A
A
T3 AT 2
A
A
A
s
-As
e1
T1
e2
(b)
Figure 1. The flow on ∂Σ.
Lemma 2.2. (Butler-McGhee [19, 4]) Suppose that p is a hyperbolic fixed point
of an autonomous system y 0 = g(y), p ∈ ω(x0 ) but {p} =
6 ω(x0 ) for some x0 .
s
u
Let W (p) be the stable manifold of p and W (p) the unstable manifold. Then
ω(x0 ) ∩ (W s (p) \ {p}) 6= ∅ and ω(x0 ) ∩ (W u (p) \ {p}) 6= ∅.
Note that Lemma 2.2 is still valid after the replacement of ω(x0 ) by α(x0 ) since
ω(x0 ) of y 0 = g(y) becomes α(x0 ) of y 0 = −g(y).
Theorem 2.3. Assume that the Kolmogorov system (6) is strongly competitive and
satisfies the following conditions:
(a) There is a unique fixed point p in intR3+ that is globally asymptotically stable
(hyperbolic with one-dimensional stable manifold W s (p) in intR3+ and globally
repelling on Σ).
(b) On ∂Σ (6) has only three fixed points e1 , e2 , e3 and either the inequalities (11)
or (12) hold:
∀i ∈ I3 ,
∀i ∈ I3 ,
fi (ei+1 ) < 0 < fi+2 (ei+1 ),
fi (ei+1 ) > 0 > fi+2 (ei+1 ).
(11)
(12)
Then ∂Σ is a globally repelling (attracting) heteroclinic limit cycle.
Proof. First, from assumption (b) it is clear that ∂Σ is a closed curve containing all
boundary fixed points e1 , e2 , e3 . From (11) or (12) and phase portraits on π1 , π2 , π3
we see that the flow on ∂Σ as t increases is shown either in Figure 1(a) or Figure
1(b).
Thus, ∂Σ is a heteroclinic cycle. It therefore remains to be proved that ∂Σ is
globally repelling (attracting). For each x0 ∈ intΣ \ {p} (x0 ∈ intR3+ \ W s (p)),
the assumption (a) ensures that α(x0 ) ⊂ ∂Σ (ω(x0 ) ⊂ ∂Σ). Since α(x0 ) (ω(x0 ))
is nonempty, connected, compact and invariant, it contains at least one boundary
fixed point, say e1 . The Jacobian of the system is
∂f1
∂f1
∂f1
x
x
f1 (x) + x1 ∂x
1
1
∂x2
∂x3
1
∂f2
∂f2
∂f2
x2 ∂x
f2 (x) + x2 ∂x
x2 ∂x
J(x) =
.
1
2
3
∂f3
∂f3
∂f3
x3 ∂x2
f3 (x) + x3 ∂x3
x3 ∂x1
From this and (11) or (12) we see that the boundary fixed points are hyperbolic
and their stable and unstable manifolds are all subsets of ∂R3+ . Since x0 belongs to
neither the stable nor the unstable manifold of e1 , we have e1 ∈ α(x0 ) (e1 ∈ ω(x0 ))
HETEROCLINIC LIMIT CYCLES
7
but {e1 } =
6 α(x0 ) ({e1 } =
6 ω(x0 )). By Lemma 2.2 and the invariance of α(x0 )
0
(ω(x )), we obtain T3 ⊂ α(x0 ) (T3 ⊂ ω(x0 )) and T1 ⊂ α(x0 ) (T1 ⊂ ω(x0 )). By the
compactness of α(x0 ) (ω(x0 )), we must have e2 , e3 ∈ α(x0 ) (e2 , e3 ∈ ω(x0 )). As
x0 belongs to none of the stable and unstable manifolds of e2 and e3 , by Lemma
2.2 again, we also have T2 ⊂ α(x0 ) (T2 ⊂ ω(x0 )). Therefore, we have proved
α(x0 ) = ∂Σ (ω(x0 ) = ∂Σ). Hence, ∂Σ is globally repelling (attracting).
2.1. Example 1. Consider the system
x2
0
x1 = x1 f1 (x) = x1 1 − x1 − β
− αx3 ,
1 + x3
x3
0
x2 = x2 f2 (x) = x2 1 − αx1 − x2 − β
,
1 + x1 x1
x03 = x3 f3 (x) = x3 1 − β
− αx2 − x3 ,
1 + x2
(13)
where α > 0 and β > 0. Since each πi is invariant and x0i < 0 for x ∈ R3+ with
xi = 1 but x 6= ei , B = [0, 1]3 is forward invariant for this system and ω(x0 ) ⊂ B
for every x0 ∈ R3+ . Since
βx2
−1
− x3β+1
(x3 +1)2 − α
3
−1
− x1β+1
Df = (x1βx
,
+1)2 − α
βx1
− x2β+1
−
α
−1
2
(x2 +1)
for α > β the system is strongly competitive in B. Apart from the axial fixed points
e1 , e2 , e3 , there are no other boundary fixed points when α >
√ 1, β < 1. There is
2αβ+(α+2)2 +β 2 −α−β
at least one interior fixed point p = µ(1, 1, 1)T where µ =
2(α+1)
(we shall show there are no other fixed points later). Let S = x1 + x2 + x3 and
P = x1 x2 x3 . Following the method on page 51 of [14], we define V = P S −3 . Then
βx1
βx2
βx3
3(x01 + x02 + x03 )
V 0 = V 3 − (1 + α)S −
−
−
−
1 + x2
1 + x3
1 + x1
S
(2 − α)V
βV
=
(x1 − x2 )2 + (x2 − x3 )2 + (x3 − x1 )2 +
T,
2S
S
where
T =
x1
x2
x3
(2x2 − x1 − x3 ) +
(2x3 − x1 − x2 ) +
(2x1 − x2 − x3 ).
1 + x1
1 + x2
1 + x3
The first term in V 0 is negative for α > 2 when x 6= s(1, 1, 1)T for any s ≥ 0.
We shall show that if α > 2 then every solution of (13) in intR3+ satisfies S < 1 for
large t so that intΣ is strictly below the plane S = 1. Then we shall see that T ≤ 0
for any S < 1.
When α > 2,
β
S 0 = S(1 − S) + x1 x2 2 − α −
1 + x3
β
β
+x1 x3 2 − α −
+ x2 x3 2 − α −
1 + x2
1 + x1
< S(1 − S).
8
ZHANYUAN HOU AND STEPHEN BAIGENT
y
0.0
0.5
1.0
1.0
z
0.5
0.0
0.5
x
0.0
1.0
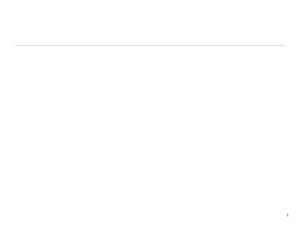
Figure 2. Globally attracting heteroclinic cycle in the competitive
Kolmogorov system (13). The globally attracting heteroclinic cycle
is e1 → e2 → e3 → e1 .
This shows that if S ≥ 1 and x0 is not on any xi -axis then S is strictly decreasing
so x(t, x0 ) satisfies S < 1 for large enough t. Then, for S < 1,
(1 + x1 )(1 + x2 )(1 + x3 )T
= x3 (2x2 − x1 − x3 )(1 + x2 )(1 + x3 ) + x1 (2x3 − x1
−x2 )(1 + x1 )(1 + x3 ) + x2 (2x1 − x2 − x3 )(1 + x1 )(1 + x2 )
1
= − [(1 − x22 − x23 )(x1 − x2 )2 + (1 − x21 − x22 )(x1 − x3 )2
2
1
+(1 − x21 − x23 )(x2 − x3 )2 ] − [(x21 − x22 )2 + (x21 − x23 )2
4
+(x22 − x23 )2 ] − [x1 (x1 − x2 )(x1 − x3 )
+x2 (x2 − x1 )(x2 − x3 ) + x3 (x3 − x1 )(x3 − x2 )].
Note that S < 1 for x ∈ B implies x2i ≤ xi < 1 for i ∈ I3 so the value in each
of the first two pairs of square brackets above is nonnegative. Denote the value in
the third pair of square brackets by h(x1 , x2 , x3 ). Then h is invariant under any
permutation on the subscripts (1, 2, 3). Thus, without loss of generality, we may
assume that 0 ≤ x1 ≤ x2 ≤ x3 . Then
h = [x1 (x2 − x1 )(x3 − x1 ) + x2 (x2 − x3 )2 + (x3 − x1 )(x2 − x3 )2 ] ≥ 0.
Therefore, S < 1 for x ∈ B implies T ≤ 0.
1
) is a cone
Note that the set Vc of x satisfying V (x) = c for each c ∈ (0, 27
3
consisting of rays starting from the origin with V0 = ∂R+ and V1/27 = {s(1, 1, 1)T :
0 ≤ s < +∞}. Therefore, α > 2 ensures that p is a global repeller on Σ and
ω(x0 ) ⊂ ∂Σ for every x0 ∈ intR3+ \ {s(1, 1, 1)T : 0 ≤ s < +∞}. From (13) we have
f2 (e1 ) = 1 − α < 0 < 1 − β = f3 (e1 ), f3 (e2 ) = 1 − α < 0 < 1 − β = f1 (e2 ),
f1 (e3 ) = 1 − α < 0 < 1 − β = f2 (e3 ).
By Theorem 2.3, ∂Σ : e1 → e3 → e2 → e1 is a heteroclinic cycle which is globally
attracting when α > 2. Figure 2 shows the heteroclinic cycle in the phase portrait.
HETEROCLINIC LIMIT CYCLES
9
2.2. Heteroclinic cycles in 3-species Lotka-Volterra systems. In this section
we consider the special case of Lotka-Volterra systems. Now the conditions (11) and
(12) applied to (2) with N = 3 become
a12 < 1 < a32 ,
a12 > 1 > a32 ,
a23 < 1 < a13 , a31 < 1 < a21 ;
a23 > 1 > a13 , a31 > 1 > a21 .
The first line of the above inequalities becomes the second line after the permutation
(1, 2, 3) → (3, 2, 1). With
a12 = α2 , a13 = β3 , a21 = β1 , a23 = α3 , a31 = α1 , a32 = β2 , a11 = a22 = a33 = 1,
(2) with N = 3 can be written as
x01
x02
x3
= r1 x1 (1 − x1 − α2 x2 − β3 x3 ),
= r2 x2 (1 − β1 x1 − x2 − α3 x3 ),
= r3 x3 (1 − α1 x1 − β2 x2 − x3 ).
(14)
Then the second line of the above inequalities for (2) with N = 3 becomes βi <
1 < αi for all i ∈ I3 for (14). Under this condition and βi > 0, it is shown [5,
Lemma 2.1] that (14) has a unique interior fixed point p. Thus a direct application
of Theorem 2.3 to (14) gives the following:
Corollary 2. Assume that (14) satisfies 0 < βi < 1 < αi for all i ∈ I3 . If p is globally asymptotically stable (hyperbolic with one-dimensional stable manifold W s (p)
and globally repelling on Σ), then ∂Σ is a globally repelling (attracting) heteroclinic
limit cycle.
Remark 1. If we use the split Lyapunov method given in [25, 29, 3] to determine whether the interior fixed point p is globally asymptotically stable or globally
repelling on Σ, it is guaranteed by [29, Lemma 4.2] that p is hyperbolic.
Q3
Q3
An obvious question arises: Does the condition i=1 (αi − 1) < i=1 (1 − βi )
Q3
Q3
( i=1 (αi − 1) > i=1 (1 − βi )) for local repulsion (attraction) of the heteroclinic
cycle ∂Σ ensure that this local behaviour extends globally? The answer is yes when
r1 = r2 = r3 [5], but unfortunately situation is much more complex when the
components of r are not all equal. Indeed, it is hinted in [5], and shown in [26], that
for systems in Zeeman’s class 27 bifurcations may occur.
We present the following result to clarify this. Let
1 α2 β3
A0 = β1 1 α3 ,
α1 β2 1
∆ = r1 r2 p1 p2 (1 − α2 β1 ) + r1 r3 p1 p3 (1 − α1 β3 ) + r2 r3 p2 p3 (1 − α3 β2 ),
(15)
N
and, for any vector v ∈ R , let D(v) = diag[v1 , . . . , vN ], the diagonal matrix.
Theorem 2.4. Assume that 0 < βi < 1 < αi for all i ∈ I3 .
(a) If αj+1 βj > 1 (4 = 1 (mod 3)) for some j ∈ I3 , then there is an open set
S0 ⊂ intR3+ such that
∀r ∈ S0 , (r1 p1 + r2 p2 + r3 p3 )∆ < r1 r2 r3 p1 p2 p3 det(A0 ).
(16)
For each r ∈ S0 , the fixed point p is hyperbolic with a one-dimensional stable
manifold and repels (locally) on Σ.
10
ZHANYUAN HOU AND STEPHEN BAIGENT
(b) If αj+1 βj < 1 for some j ∈ I3 , then there is an open set S1 ⊂ intR3+ such that
∀r ∈ S1 , (r1 p1 + r2 p2 + r3 p3 )∆ > r1 r2 r3 p1 p2 p3 det(A0 ).
(c)
(d)
(e)
(f )
(17)
For each r ∈ S1 , the fixed point p is (locally) asymptotically stable.
Q3
Q3
If (16) holds and i=1 (αi − 1) < i=1 (1 − βi ), then p is a local repeller
on Σ and the heteroclinic cycle ∂Σ is locally repelling. Moreover, for each
x0 ∈ intR3+ \ W s (p), ω(x0 ) is a periodic orbit and, if x(t, x0 ) is bounded for
t < 0, α(x0 ) is either {0} or {p} or ∂Σ or a periodic orbit.
Q3
Q3
If (17) holds and i=1 (αi − 1) > i=1 (1 − βi ), then the interior fixed point p
is locally asymptotically stable and the heteroclinic cycle is locally attracting.
Hence, for each x0 ∈ intΣ \ {p}, α(x0 ) is a periodic orbit and ω(x0 ) is either
{p} or ∂Σ or a periodic orbit.
Q3
Q3
2 −1 1−β3 T
, α1 −1 ) for each
If i=1 (αi − 1) = i=1 (1 − βi ), then (14) with r = s(1, α1−β
1
3
s > 0 has a flat carrying simplex Σ = {x ∈ R+ : x1 + x2 + x3 = 1}, which is
filled with periodic orbits between p and ∂Σ.
If there is a matrix D0 = diag[d1 , d2 , d3 ] with di > 0 for i ∈ I3 such that
D0 A0 + AT0 D0 is positive definite, then for all r ∈ intR3+ , the fixed point p is
globally asymptotically stable and ∂Σ is a globally repelling heteroclinic limit
cycle.
Proof. The Jacobian of (14) is J =
polynomial of J is
∂f
∂x (p)
= −D(r)D(p)A0 . So the characteristic
det(D(r)D(p)A0 + λI) = λ3 + δλ2 + ∆λ + r1 r2 r3 p1 p2 p3 det(A0 ),
where ∆ is given by (15) and δ = r1 p1 + r2 p2 + r3 p3 . From [5] we know that
det(A0 ) > 0. Since r1 r2 r3 p1 p2 p3 det(A0 ) and δ are always positive, by RouthHurwitz criterion, all the eigenvalues of J have a negative real part if and only if
the inequality in (17) holds. Clearly, det(A0 ) > 0 ensures that J has at least one
negative eigenvalue −λ1 < 0. If J has a pair of pure imaginary eigenvalues ±iµ,
then
(λ + λ1 )(λ + iµ)(λ − iµ) = λ3 + λ1 λ2 + µ2 λ + λ1 µ2 .
This shows that there are a pair of pure imaginary eigenvalues if and only if
(r1 p1 + r2 p2 + r3 p3 )∆ = r1 r2 r3 p1 p2 p3 det(A0 ).
Therefore, there are two eigenvalues with a positive real part if and only if the
inequality in (16) holds.
(a) By αj+1 βj > 1, there is a negative term rj+1 rj2 pj+1 p2j (1 − αj+1 βj ) in δ∆ of
order O(rj2 ) but r1 r2 r3 p1 p2 p3 det(A0 ) is linear in rj . Thus, when rj is large enough
and the other two components of r are fixed, r satisfies the inequality in (16). Then
the existence of the open set S0 follows from the strict inequality and continuity.
(b) The proof is similar to (a). By αj+1 βj < 1, there is a positive term
rj+1 rj2 pj+1 p2j (1 − αj+1 βj ) in δ∆ of order O(rj2 ) but r1 r2 r3 p1 p2 p3 det(A0 ) is linear in rj . Thus, when rj is large enough and the other two components of r are
fixed, r satisfies the inequality in (17). Then the existence of the open set S1 follows
from the strict inequality and continuity.
(c) From (a) we know that p is a local repeller on Σ. From section 1 we also know
that ∂Σ is a local repeller. Then, for each x0 ∈ intR3+ \ W s (p), ω(x0 ) is a nonempty
compact and connected subset of intΣ \ {p}. So by the Poincaré-Bendixson theorem
for three dimensional cooperative and competitive systems [18, Theorem 2.2] ω(x0 )
is a closed orbit. Clearly, if x(t, x0 ) is bounded for t < 0, then either x0 is in the
HETEROCLINIC LIMIT CYCLES
11
basin of repulsion of the origin, in this case α(x0 ) = {0}, or x0 ∈ intΣ \ {p}. In the
latter case, if x0 is in the basin of repulsion of {p} then α(x0 ) = {p}; if x0 is in the
basin of repulsion of ∂Σ then α(x0 ) = ∂Σ; otherwise α(x0 ) is a closed orbit.
(d) From (b) we know that p is locally asymptotically stable and, from section
1, ∂Σ is locally attracting. Then, for each x0 ∈ intΣ \ {p}, α(x0 ) is a nonempty
compact and connected subset of intΣ \ {p} so it is a closed orbit [20]. If x0 is in
the region of attraction of p then ω(x0 ) = {p}; if x0 is in the region of attraction of
∂Σ then ω(x0 ) = ∂Σ; otherwise ω(x0 ) is a closed orbit.
(e) From [24] we know that the carrying simplex is flat if its edges are line
segments. The condition for this is
r1 (1 − α2 ) + r2 (1 − β1 ) = 0,
r1 (1 − β3 ) + r3 (1 − α1 ) = 0,
r2 (1 − α3 ) + r3 (1 − β2 ) = 0.
(18)
Q3
Q3
2 −1 1−β3 T
When i=1 (αi − 1) = i=1 (1 − βi ), r = s(1, α1−β
, α1 −1 ) is a solution of (18) for
1
any s ∈ R. Finally it is shown in [25, Theorem 4.8] that if the carrying simplex is
flat then it is filled with periodic orbits.
(f) For any given r ∈ intR3+ , let D = D0 D(r)−1 . Then the matrix DD(r)A0 +
T
A0 D(r)D = D0 A0 + AT0 D0 is positive definite. By [21, Theorem 3.2.1], the fixed
point p is globally asymptotically stable. By Corollary 2, ∂Σ is a globally repelling
heteroclinic limit cycle.
2.3. Example 2. Consider system (14) with
1 1.2 0.5
A0 = 0.6 1 1.3 .
1.1 0.5 1
(19)
Since the leading principal minors of the symmetric matrix A0 + AT0 have positive
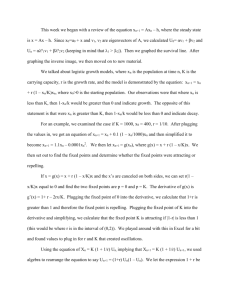
values 2, 0.76, 0.288 respectively, A0 + AT0 is positive definite. By Theorem 2.4 (f),
the interior fixed point p is globally asymptotically stable and ∂Σ is a globally
repelling heteroclinic limit cycle (see Figure 3).
3. Heteroclinic limit cycles in N -dimensional systems with vanishing
components. In this section, we consider system (1) with the assumption that,
after relabeling the components if necessary, the three dimensional system (6) is the
limiting subsystem of (1) as t → +∞ (t → −∞), namely,
0
N
0
0
∀x ∈ intR+ , ∀i ∈ IN \ I3 , lim xi (t, x ) = 0
lim xi (t, x ) = 0 .
(20)
t→+∞
t→−∞
Suppose the 3-dimensional Kolmogorov system (6) has a globally attracting (repelling) heteroclinic limit cycle Γ0 . Is this Γ0 also a globally attracting (repelling)
heteroclinic limit cycle of (1)? The aim of this section is to provide an answer to
this question, which depends on the conditions to guarantee (20).
Lemma 3.1. Assume that the strongly competitive Kolmogorov system (1) satisfies
the following conditions:
(i) There is a nonempty J0 ⊂ IN such that, if J0 6= IN ,
0
0
∀k ∈ IN \ J0 , ∀x0 ∈ intRN
+ (x ∈ intΣ), xk (x , t) = o(1)
as t → +∞ (t → −∞).
(21)
12
ZHANYUAN HOU AND STEPHEN BAIGENT
x
1.0
0.0
0.5
1.0
z
0.5
0.0
0.0
0.5
y
1.0
Figure 3. Globally repelling heteroclinic cycle in the competitive
Lotka-Volterra system (14) with A = A0 given by (19) and r1 =
r2 = r3 = 1. The globally repelling heteroclinic cycle is e1 → e2 →
e3 → e1 .
(ii) there exist i ∈ J0 , J1 ⊂ J0 \ {i} and q ∈ RN
+ with qj > 0 if and only if j ∈ J1
such that
X
∀x ∈ S0 ,
qj fj (x) > fi (x) (< fi (x)),
(22)
j∈J1
where S0 is the set of x ∈ RN
+ such that fj (x) ≤ 0 ≤ fk (x) for some j, k ∈ J0
and, if J0 6= IN , x ∈ π` for all ` ∈ IN \ J0 .
Then there is a δ0 > 0 such that
xi (t, x0 ) = o(e−δ0 |t| ) as t → +∞ (t → −∞)
(23)
T
T
0
0
0
for all x0 ∈ intRN
+ (x ∈ intΣ) or x ∈
j∈IN \J0 πj (x ∈ Σ ∩ ( j∈IN \J0 πj )) with
0
x` > 0 for all ` ∈ J1 ∪ {i}.
0
0
Proof. For each x0 ∈ RN
+ , if fk (x ) > 0 for all k ∈ IN then x is in the basin of
0
0
repulsion of the origin so limt→−∞ x(t, x ) = 0; if fk (x ) < 0 for all k ∈ IN then x0
is in the basin of repulsion of ∞ so x(t, x0 ) is unbounded on (−∞,
T 0]. Therefore,
the carrying simplex Σ must satisfy Σ ⊂ S0 if J0 = IN or Σ ∩ ( `∈IN \J0 π` ) ⊂ S0
0
0
if J0 6= IN . Then, for each x0 ∈ intRN
⊂ Σ (α(x0 ) ⊂ Σ),
+ (x ∈ intΣ), since ω(x )T
0
0
0
by condition (i) we have ω(x ) ⊂ S0 (α(x ) ⊂ S0 ). If x ∈ j∈IN \J0 πj (x0 ∈
T
T
Σ ∩ j∈IN \J0 πj ) with x0` > 0 for all ` ∈ J1 ∪ {i}, as j∈IN \J0 πj is invariant, we
also have ω(x0 ) ⊂ S0 (α(x0 ) ⊂ S0 ). Let
T
T
δ1 = min [q f (x) − fi (x)]
δ1 = max[q f (x) − fi (x)] .
x∈S0
x∈S0
Note that S0 is compact. Then, by condition (ii), we have δ1 > 0 (< 0). Thus, by
the compactness of S0 , there is an ε0 > 0 such that
T
∀x ∈ B(S0 , ε0 ) ∩ RN
+ , q f (x) − fi (x) ≥ 2δ1 /3 (≤ 2δ1 /3),
HETEROCLINIC LIMIT CYCLES
13
where B(S0 , ε0 ) is the ε0 neighbourhood of S0 . Since ω(x0 ) ⊂ S0 (α(x0 ) ⊂ S0 ),
there is a T > 0 such that x(t, x0 ) ∈ B(S0 , ε0 ) ∩ RN
+ for t ≥ T (t ≤ −T ). Let
Y
V (t) = xi (t, x0 )
(xj (t, x0 ))−qj .
j∈J1
Then, for t ≥ T ,
2
V 0 (t) = V (t)[fi (x(t, x0 )) − q T f (x(t, x0 ))] ≤ − δ1 V (t)
3
(V 0 (t) ≥ − 23 δ1 V (t) for t ≤ −T ) so V (t) ≤ V (T )e−2δ1 (t−T )/3 for t ≥ T (V (t) ≤
V (−T )e−2δ1 (t+T )/3 for t ≤ −T ). Then, by the definition of V (t) and the boundedness of x(t, x0 ) on [0, +∞) ((−∞, 0]), we obtain (23) with δ0 = |δ1 |/2.
Remark 2. In some cases, the inequalities (22) can be guaranteed by some inequalities on coefficients of the system. This will be demonstrated in Example 3
later in this section. For the particular class of Lotka-Volterra systems, there are
various criteria available for some components of all solutions to vanish (see [22]–
[28] for example). The proof of Lemma 3.1 is actually a generalisation of that of
[28, Theorem 2], which is included in the corollary below for the case of t → +∞.
Corollary 3. Assume that the Lotka-Volterra system (2) satisfies the following
conditions:
(i) There exists a nonempty J0 ⊂ IN such that, if J0 6= IN ,
0
0
∀k ∈ IN \ J0 , ∀x0 ∈ intRN
+ (x ∈ intΣ), xk (t, x ) = o(1)
as t → +∞ (t → −∞).
(ii) There exist i ∈ J0 , a nonempty J1 ⊂ J0 \ {i} and c ∈ RN
+ with cj > 0 if and
only if j ∈ J1 and c1 + · · · + cN = 1 such that
X
∀k ∈ J0 ,
cj ajk < aik (> aik ).
(24)
j∈J1
Then there is a δ0 > 0 such that the solution of (2) satisfies
xi (t, x0 ) = o(e−δ0 |t| ) as t → +∞ (t → −∞)
T
T
0
0
0
for all x0 ∈ intRN
+ (x ∈ intΣ) or x ∈
j∈IN \J0 πj (x ∈ Σ ∩ ( j∈IN \J0 πj )) with
x0` > 0 for all ` ∈ J1 ∪ {i}.
Proof. Take qj = ri cj /rj . Then (24) implies
X
X X
qj fj (x) = ri 1 −
cj ajk xk > fi (x) (< fi (x))
j∈J1
k∈J0 j∈J1
RN
+
for all x ∈
with x` = 0 if ` ∈ IN \ J0 . Then condition (ii) of Lemma 3.1 is
satisfied and the conclusion follows.
Theorem 3.2. Suppose (1) meets the following conditions:
(a) The property (20) is obtained by N − 3 successive applications of Lemma 3.1
to (1).
(b) As a subsystem of (1), (6) meets the requirement of Theorem 2.3 so it has
a globally repelling (attracting) interior fixed point p and a globally attracting
(repelling) heteroclinic limit cycle Γ0 .
(c) Each of the three axial fixed points e1 , e2 , e3 of (6) is a hyperbolic fixed point
of (1).
14
ZHANYUAN HOU AND STEPHEN BAIGENT
Then the following conclusions hold:
(i) As a fixed point of (1), p has an (N −2)-dimensional stable manifold W s (p) ⊂
u
intRN
+ ((N − 3)-dimensional unstable manifold W (p) ⊂ intΣ), i.e.
∀x0 ∈ W s (p),
lim x(t, x0 ) = p (∀x0 ∈ W u (p),
t→+∞
lim x(t, x0 ) = p).
t→−∞
(ii) For each i ∈ I3 , there is a k satisfying 2 ≤ k ≤ N − 1 such that ei as a
fixed point of (1) has a k-dimensional stable manifold W s (ei ) ⊂ ∂RN
+ and an
(N − k)-dimensional unstable manifold W u (ei ) ⊂ ∂RN
.
+
(iii) The heteroclinic cycle Γ0 of (6) is also a globally attracting (repelling) heteroclinic limit cycle of (1), i.e.
s
0
0
u
0
∀x0 ∈ intRN
+ \ W (p), ω(x ) = Γ0 (∀x ∈ intΣ \ ({p} ∪ W (p)), α(x ) = Γ0 ).
Proof. (i) With p = (p1 , p2 , p3 , 0, . . . , 0)T ∈ RN
+ as a fixed point of (1), we first show
that {p} is strictly above (below) γj for all j ∈ IN \ I3 . By the assumption (a), in
the last of the (N − 3) applications of Lemma 3.1, we have J0 = I3 ∪ {i}, J1 ⊂ I3 .
TN
Since {p} = γ1 ∩ γ2 ∩ γ3 ∩ ( j=4 πj ), we have fk (p) = 0 for k ∈ I3 . By Lemma
P
3.1 condition (ii), 0 = j∈J1 qj fj (p) > fi (p) (< fi (p)). Thus, {p} is strictly above
(below) γi . Repeating the above process, we see that {p} is strictly above (below)
γj for all j ∈ IN \ I3 . Then, by assumption (b), the Jacobian J(p) has exactly N − 2
negative eigenvalues (N − 3 positive eigenvalues) so the conclusion (i) follows.
(ii) This follows directly from assumptions (b) and (c).
s
(iii) By condition (a) and conclusion (i), for each x0 ∈ intRN
+ \ W (p) (x0 ∈
u
0
0
0
0
intΣ \ W (p)), we have ω(x ) ⊂ Γ0 (α(x ) ⊂ Γ0 ). If ω(x ) 6= Γ0 (α(x ) 6= Γ0 ), then
following the same proof of Theorem 2.3 we would have obtained a contradiction.
Therefore, we must have ω(x0 ) = Γ0 (α(x0 ) = Γ0 ).
Corollary 4. For Lotka-Volterra system (2), the statement of Theorem 3.2 is still
valid after the replacements of (1) by (2), Lemma 3.1 by Corollary 3, Theorem 2.3
by Corollary 2 and (6) by (14).
3.1. Example 3. Consider system (1) with
N
X
x2
− αx3 −
a1j gj (xj ),
1 + x3
j=4
f1 (x)
=
1 − x1 − β
f2 (x)
=
1 − αx1 − x2 − β
f3 (x)
=
1−β
fi (x)
=
1 − ai1 x1 − ai2 x2 − ai3 x3 −
N
X
x3
−
a2j gj (xj ),
1 + x1 j=4
N
X
x1
− αx2 − x3 −
a3j gj (xj ),
1 + x2
j=4
N
X
(25)
aij gj (xj ),
j=4
where N > 3, i ∈ IN \ I3 , α > 2, 0 < β < 1, the aij are positive constants, and each
gk ∈ C 1 (R+ , R+ ) satisfies
gk0 (s) > 0 ∀s ∈ R+ , gk (0) = 0 and gk (s) → +∞ as s → +∞.
HETEROCLINIC LIMIT CYCLES
15
Then (1) with (25) is strongly competitive. Assume that the positive coefficients
aij satisfy, ∀i ∈ IN \ I3 , ∀j ∈ Ii \ I3 and ∀k ∈ I3 ,
aik >
1
1
(1 + α + β), aij > (a1j + a2j + a3j ).
3
3
(26)
Then (f1 (x) + f2 (x) + f3 (x))/3 > fN (x) for all x ∈ RN
+ \ {0}. By Lemma 3.1, every
N
solution of (1) with (25) in intR+ satisfies xN (t) = o(e−δ0 t ) (t → +∞) for some
δ0 > 0. If N > 4, then (26) for i = N − 1 ensures that (f1 (x) + f2 (x) + f3 (x))/3 >
fN −1 (x) for all x ∈ (RN
+ ∩πN )\{0}. By Lemma 3.1 again, every solution of (1) with
−δ0 t
(25) in intRN
) (t → +∞) for some δ0 > 0. Repeating
+ satisfies xN −1 (t) = o(e
the above process N − 3 times, we obtain limt→+∞ xj (t, x0 ) = 0 for all x0 ∈ intRN
+
and j ∈ IN \ I3 . From Example 1 given in the previous section we know that
system (13) as a subsystem of (25) has a globally repelling interior fixed point p
and a globally attracting heteroclinic limit cycle Γ0 by the application of Theorem
2.3. From α > 2, 0 < β < 1 and (26) we have aik > 1, so fi (ek ) < 0, for all
1 ≤ k ≤ 3 < i ≤ N . This means that the Jacobian of (1) with (25) at each ek
has N − 1 negative eigenvalues and 1 positive eigenvalue. As the conditions (a)–(c)
of Theorem 3.2 are all met, the fixed point p has an (N − 2)-dimensional stable
s
manifold W s (p) and ω(x0 ) = Γ0 for all x0 ∈ intRN
+ \ W (p).
3.2. Example 4. Consider the competitive Lotka-Volterra system
x01
x02
x03
x04
2
= x1 (1 − x1 − 6x2 − x3 − 4x4 ),
3
2
= x2 (1 − x1 − x2 − 6x3 − 4x4 ),
3
2
= x3 (1 − 6x1 − x2 − x3 − 4x4 ),
3
= x4 (1 − 4x1 − 4x2 − 4x3 − 6x4 ).
(27)
The steady states are
(0, 0, 0, 0)T , e1 = (1, 0, 0, 0)T , e2 = (0, 1, 0, 0)T , e3 = (0, 0, 1, 0)T , (0, 0, 0, 1/6)T
3
3
3
and p = ( 23
, 23
, 23
, 0)T . There is no interior fixed point so all omega limit sets are
contained in the boundary. The conclusion for this example can be achieved by
analysing S 0 = (x1 + x2 + x3 )0 and x04 together. However, it is more convenient to
use Corollary 3 and Theorem 3.2. Note that for c ∈ R4+ with c1 = c2 = c3 = 13
P3
and c4 = 0, we have c1 + · · · + c4 = 1 and j=1 cj ajk = 23
9 < 4 = a4k for k ∈ I3 ,
P3
j=1 cj aj4 = 4 < 6 = a44 . Then, by Corollary 3, the 4th component of every
solution of (27) in intR4+ vanishes as t → +∞. Comparing the subsystem of (27)
with (3), we see that the May-Leonard subsystem of (27) on π4 has α = 6 and
3
(1, 1, 1)T is globally
β = 2/3. Since α + β = 20/3 > 2, the interior fixed point 23
0
repelling and there is a globally attracting heteroclinic cycle Γ : e1 → e2 → e3 → e1
(see Figure 4 for the phase portrait in the case α = 5/2, β = 1/2). Clearly, each ej
is a hyperbolic fixed point. By Theorem 3.2, p has a 2-dimensional stable manifold
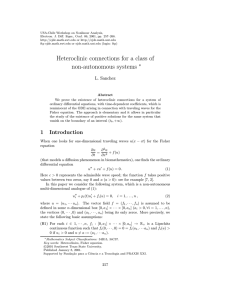
W s (p) in intR4+ and ω(x0 ) = Γ0 for all x0 ∈ intR4+ \ W s (p).
16
ZHANYUAN HOU AND STEPHEN BAIGENT
E4
E3
E1
E2
Figure 4. Dynamics of (27) projected on the 3-dimensional probability simplex. Parameter values: α = 5/2, β = 1/2. The globally
attracting heteroclinic cycle is E1 → E2 → E3 → E1.
3.3. Example 5. This example demonstrates the application of Corollary 4 for a
globally repelling heteroclinic cycle. Consider system (2) with N = 4 and
1 1.2 0.5 2
0.6 1 1.3 1
(28)
A=
1.1 0.5 1 2 .
0.8 0.5 0.7 1
The average of the first three rows of A is (A1 + A2 + A3 )/3 = (0.9, 0.9, 2.8/3, 5/3).
Since each of its components is greater than that of A4 , by Corollary 3 every solution
of (2) with (28) in intR4+ satisfies limt→−∞ x4 (t) = 0. From example 2 we know
that (14) with (19) as a subsystem of (2) with (28) has a globally attracting interior
fixed point p and a globally repelling heteroclinic limit cycle Γ0 . From (28) and the
Jacobian matrix we can see that each of the axial fixed points e1 , e2 , e3 is hyperbolic.
Then, by Corollary 4, p has a one-dimensional unstable manifold W u (p) ⊂ Σ and
Γ0 is a globally repelling heteroclinic limit cycle such that α(x0 ) = Γ0 for all x0 ∈
intΣ \ W u (p).
4. Heteroclinic limit cycles in N -dimensional competitive Kolmogorov
systems. In this section, we consider system (1) with a globally attracting (reN
pelling) fixed point p ∈ intRN
+ . Let E be the set of all fixed points of (1) in R+ .
N
For any y ∈ R+ and ε > 0, we denote the open ball centered at y with radius ε by
B(y, ε), the closed ball by B(y, ε) and the sphere by ∂B(y, ε) = B(y, ε) \ B(y, ε).
We now define a concept which will be used in the condition of the next theorem.
HETEROCLINIC LIMIT CYCLES
17
Definition 4.1. A set Γ is called an extended trajectory if Γ satisfies the following
two requirements:
(i) Γ consists of a finite number of heteroclinic trajectories Γ1 , . . . , Γk and k + 1
fixed points p0 , p1 , . . . , pk .
(ii) Each Γi connects pi−1 to pi with flow direction from pi−1 to pi so that the
flow direction on Γ is from p0 to pk .
An extended trajectory Γ is called simple if Γ does not contain any cycle, i.e.
p0 , . . . , pk are distinct.
Theorem 4.2. Assume that every fixed point of (1) is hyperbolic and the following
conditions hold.
(i) There is a fixed point p ∈ intRN
+ that is a global repeller (attractor) on intΣ.
(ii) fi+1 (ei ) > 0 (modulo N ) (< 0) for i ∈ IN and fi (ej ) < 0 (> 0) otherwise.
(iii) The set E of fixed points is finite and if E 0 = E \ {0, p, e1 , . . . , eN } =
6 ∅ then
each fixed point q ∈ E 0 restricted to Σ is a saddle point.
(iv) For each i ∈ IN , restricted to Σ ∩ πi+1 , ei is an attractor (a repeller). Moreover, every nontrivial trajectory in Σ ∩ πi+1 is heteroclinic and every extended
trajectory is simple. Furthermore, for each fixed point q ∈ (Σ ∩ πi+1 ) \ {ei },
W u (q) ⊂ πi+1 (W s (q) ⊂ πi+1 ).
0
Then ω(x0 ) = Γ0 (α(x0 ) = Γ0 ) for every x0 ∈ intRN
+ \ U (x0 ∈ intΣ \ U ), where Γ
is the heteroclinic cycle joining the N axial fixed points e1 → e2 → · · · → eN → e1
(e1 → eN → · · · → e2 → e1 ) and U is the union of E and the stable (unstable)
manifolds of all saddle points.
Remark 3. Note that condition (ii) ensures that every axial fixed point is a saddle
point with an (N − 1)-dimensional stable manifold and a one-dimensional unstable
manifold (2D stable and (N − 2)D unstable). Suppose p is a global repeller on Σ.
Then, by assumptions (ii) and (iii), every nonzero fixed point is a saddle point so
its stable manifold is of dimension less than N . Thus, U is the union of a finite
number of stable manifolds of dimension less than N and the set of fixed points.
Since ω(x0 ) = Γ0 holds for all x0 ∈ intRN
+ \ U , by Definition 1.1 Γ0 is a globally
attracting heteroclinic limit cycle. However, if p is a global attractor, by (ii)–(iv)
every fixed point q ∈ (E ∩ πi+1 ) \ {0, ei } is a saddle point with W s (q) ⊂ πi+1 of
dimension at least 2 and W u (q) of dimension at most N − 2. Therefore, U is the
union of a finite number of unstable manifolds of dimension less than N − 1 and
the set of fixed points. Since α(x0 ) = Γ0 holds for all x0 ∈ intRN
+ \ U , by Definition
1.1 again Γ0 is a globally repelling heteroclinic limit cycle.
Proof of Theorem 4.2. Suppose p is a global repeller on Σ. Then, for each x0 ∈
intRN
+ \ U , we have ω(x0 ) ⊂ ∂Σ. Thus, ω(x0 ) ∩ ∂Σ ∩ πi+1 6= ∅ for some i (0 ≤ i ≤
N − 1).
We first show that ei ∈ ω(x0 ). For any x1 ∈ ω(x0 ) ∩ ∂Σ ∩ πi+1 , if x1 = ei then
ei ∈ ω(x0 ). Suppose x1 6= ei and x1 is a fixed point. Since W u (x1 ) ⊂ πi+1 by
(ii) and (iv) and ω(x0 ) ∩ (W u (x1 ) \ {x1 }) 6= ∅ by Lemma 2.2, there is an extended
trajectory Γ̃1 from x1 to a fixed point x2 satisfying Γ̃1 ⊂ ω(x0 ) ∩ ∂Σ ∩ πi+1 . If
x2 = ei then ei ∈ ω(x0 ). Otherwise Γ̃1 can be further extended from x1 through
x2 to a fixed point x3 such that Γ̃1 ⊂ Γ̃2 ⊂ ω(x0 ) ∩ ∂Σ ∩ πi+1 . Since E is finite by
(iii) and every extended trajectory is simple, repeating the above process a finite
number of times we obtain ei ∈ ω(x0 ). If x1 is not a fixed point then there is an
extended trajectory Γ̃1 through x1 from a fixed point y1 ∈ ω(x0 ) ∩ ∂Σ ∩ πi+1 to
18
ZHANYUAN HOU AND STEPHEN BAIGENT
another fixed point x2 ∈ ω(x0 ) ∩ ∂Σ ∩ πi+1 . Then the same reasoning used above
also shows that ei ∈ ω(x0 ).
Since ei is a saddle point and its unstable manifold W u (ei ) in RN
+ consists of ei
and the heteroclinic trajectory Γi from ei to ei+1 in the 2-dimensional xi xi+1 -plane,
by Lemma 2.2, Γi ⊂ ω(x0 ). Thus, we also have ei+1 ∈ ω(x0 ). Repeating the above
process N times, we obtain Γ0 ⊂ ω(x0 ).
Note that in RN
+ , Γi is the only trajectory going out from ei . This shows that
ω(x0 ) = Γ0 .
If p is a global attractor, for each x0 ∈ intΣ\U , replacing ω(x0 ) by α(x0 ), W u (x1 )
by W s (x1 ), W u (ei ) by W s (ei ), the above reasoning is still valid.
4.1. Example 6. Consider the following 4-dimensional May-Leonard system
x0i = xi (1 − Ai x),
with interaction matrix
1
α
A=
γ
β
β
1
α
γ
γ
β
1
α
i ∈ I4
(29)
α
γ
,
β
1
(30)
1
where α, β and γ are positive constants. Then p ∈ intR4+ with pi = 1+α+β+γ
for
i ∈ I4 is the unique interior fixed point. Let
4
β−1
Ω(A) =
.
1−α
Then, if γ > 1 and
0 < α < 1, β > 1, α + β > 2
(31)
so that Ω(A) > 1, we know from [1, 7] that the heteroclinic cycle Γ0 : e1 → e2 →
· · · e4 → e1 is at least locally attracting. The question is whether Γ0 is globally
attracting.
In what follows we assume that either (32) or (33) holds, where
α < 1 < β, 2 < γ + 1 < α + β (< α2 + β 2 ),
2
(32)
2
α > 1 > β, 2 > γ + 1 > α + β > α + β .
(33)
(In (32), the condition α2 + β 2 > α + β holds automatically since α + β > 2.) In
particular, by (31), (32) ensures that Γ0 is at least locally attracting. We wish to
use Theorem 4.2 to show that Γ0 is globally attracting.
First we show that p is a global repeller (attractor) if (32) ((33)) holds. We use
the split Lyapunov method, and in particular Theorem 6.7 in [25] (see also [29]).
The Jacobian matrix of (29) at p is
1
β
γ
α
α
1
1
β
γ
.
−D(p)A = −diag[p1 , p2 , p3 , p4 ]A = −
γ
α
1
β
1+α+β+γ
β
γ
α
1
The matrix D(p)A has an eigenvalue λ0 = 1 with a corresponding left eigenvector
v T = (1, 1, 1, 1). Since D(v) is the identity matrix, we have
α+β
α+β
1
γ
2
2
α+β
α+β
1
1
1
γ
2
2
(AD(v)−1 + (AD(v)−1 )T ) = (A + AT ) =
α+β
α+β .
γ
1
2
2
2
2
α+β
α+β
γ
1
2
2
HETEROCLINIC LIMIT CYCLES
19
Then the symmetric matrix
2 − (α + β)
1−γ
1 + γ − (α + β)
1−γ
2(1 − γ)
1−γ
M =
1 + γ − (α + β)
1−γ
2 − (α + β)
is obtained from 21 (A + AT ) by subtracting the last column from every column,
subtracting the last row from every row, and then deleting the last row and column.
The leading principal minors of M are
2 − (α + β), (γ − 1)[2(α + β) − γ − 3], −4(γ − 1)2 (α + β − γ − 1).
From these minors we find that M is negative definite provided 2 < γ + 1 <
α + β, and M is positive definite if α + β < γ + 1 < 2. Hence M is negative
(positive) definite under the assumptions of (32) ((33)). By [25, Theorem 6.7] p is
a global repeller (attractor) and moreover by [29, Theorem 4.4] the global attractor
is globally asymptotically stable. From Remark 1 we know that p is hyperbolic.
Thus, the assumption (32) or (33) ensures the conditions (i) and (ii) of Theorem
4.2 for (29). Note that condition (ii) of Theorem 4.2 implies that each axial fixed
point is hyperbolic.
Next we examine the existence of non-axial boundary fixed points. Let the vector
p∗ = (x∗1 , x∗2 , x∗3 )T ∈ R3 be defined by
−1
(1 − α)(β − γ) + (1 − β)2
1
β
γ
1
1
1
β 1 = (γ − 1)(α + β − γ − 1) , (34)
p∗ = α
δ
(1 − α)2 + (β − 1)(γ − α)
γ
α
1
1
where δ = 1 + γ(α2 + β 2 ) − γ 2 − 2αβ. Now we have
δ
=
(1 − γ 2 ) + (γ − 1)(α2 + β 2 ) + α2 + β 2 − 2αβ
=
(γ − 1)(−(1 + γ) + (α2 + β 2 )) + (α − β)2 .
Hence if (32) holds we have γ > 1 and α + β > γ + 1, so that α2 + β 2 > α + β and
so δ > 0. On the other hand if (33) holds then γ < 1 and α2 + β 2 < α + β so
δ > (γ − 1)(−(1 + γ) + (α + β)) + (α − β)2 > (α − β)2 > 0.
Moreover, if either (32) or (33) hold we have x∗2 = 1δ (γ − 1)(α + β − γ − 1) > 0.
Now we must show that for either (32) or (33) we have x∗1 (α, β) = 1δ ((1 − α)(β −
γ) + (1 − β)2 ) > 0 and x∗3 (α, β) = 1δ ((1 − β)(α − γ) + (1 − α)2 ) > 0. If (32) holds then
(1 − α) > 0 and β − γ > 1 − α > 0 so that x∗1 (α, β) > 0, and since β − 1 > γ − α > 0
we also have x∗3 (α, β) > 0. For the case (33), 1 − α < 0 and β − γ < 1 − α < 0
so that x∗1 (α, β) > 0, and also β − 1 < 0, γ − α < γ − 1 < 0 so that x∗3 (α, β) > 0.
The conclusion is that whenever (32) or (33) is satisfied, q4 = (x∗1 , x∗2 , x∗3 , 0)T is a
boundary fixed point. Similarly we find that
Q1 = (
1
1
, 0,
, 0)T ,
1+γ
1+γ
q1 = (0, x∗1 , x∗2 , x∗3 )T ,
Q2 = (0,
q2 = (x∗3 , 0, x∗1 , x∗2 )T ,
1
1 T
, 0,
) ,
1+γ
1+γ
q3 = (x∗2 , x∗3 , 0, x∗1 )T
and q4 are the only fixed points in E \ {0, p, e1 , e2 , e3 , e4 }.
We next check that these boundary fixed points satisfy the conditions (iii) and
(iv) of Theorem 4.2 under the assumption (33). Note that p∗ ∈ intR3+ defined by
20
ZHANYUAN HOU AND STEPHEN BAIGENT
(34) is a fixed point of the subsystem of (29) with x4 = 0. The symmetric matrix
1
S= α
γ
β
1
α
γ
1
β + α
1
γ
β
1
α
T
γ
2
β = α+β
1
2γ
α+β
2
α+β
2γ
α+β
2
has leading principal minors 2, 4 − (α + β)2 and 4(1 − γ)(2 + 2γ − (α + β)2 ).
Since γ < 1, α + β < 1 + γ < 2 so that 4 − (α + β)2 > 0. Moreover, (α + β)2 <
(1+γ)2 < 2(1+γ), so that all leading principal minors are positive and S is positive
definite. By [21, Theorem 3.2.1], p∗ is globally asymptotically stable in intR3 . Now
identifying p∗ with q4 , we show that J4 , the Jacobian matrix of (29) at q4 , has last
row (0, 0, 0, 1 − βx∗1 − γx∗2 − αx∗3 ) and so has an eigenvalue λ1 = 1 − (β, γ, α, 1)q4 =
1 − (β, γ, α, 1)(x∗1 , x∗2 , x∗3 , 0)T . The set γ1 ∩ γ3 ∩ π4 is the line segment Q1 z where
α−β
1−γ
z = ( α−βγ
, α−βγ
, 0, 0)T and q4 ∈ Q1 z. As (β, γ, α, 1)Q1 = α+β
1+γ < 1 and, by
β < γ < 1 < α,
(β, γ, α, 1)z
=
=
<
β(α − β) + γ(1 − γ)
α − βγ
α(β − 1) + β(γ − β) + γ(1 − γ)
+1
α − βγ
γ(1 − β) + α(β − 1)
+ 1 < 1,
α − βγ
we also have (β, γ, α, 1)q4 < 1 which shows λ1 > 0. The remaining eigenvalues
of J4 are those of the 3 × 3 submatrix J¯4 obtained by removing the last row and
column from J4 . The 3-dimensional competitive May-Leonard system obtained
by restricting to π4 is globally stable, as shown above by using that S is positive
definite when (33) holds. By global stability, the matrix −A is D−stable, i.e. −AD
is stable for any positive diagonal matrix D. Taking D = D(x∗1 , x∗2 , x∗3 ) we see
that J¯4 is a D−stable matrix, which shows that J4 has one positive and 3 negative
eigenvalues so that q4 is a saddle point with a 3-dimensional stable manifold in
π4 and a one-dimensional unstable manifold. Thus, restricted to Σ, q4 is a saddle
point. Similarly, q1 , q2 , and q3 are all saddle points restricted to Σ.
Next, the subsystem of (29) with x2 = x4 = 0 and 0 < γ < 1 is a typical planar competitive Lotka-Volterra system; it can be shown by phase plane analysis
1
1 T
that ( 1+γ
, 1+γ
) is a globally asymptotically stable node. Since (α, 1, β, γ)Q1 =
(β, γ, α, 1)Q1 =
α+β
1+γ
< 1, J1 , the Jacobian of (29) at Q1 , has two positive eigenn
o
γ−1 −α−β+γ+1 −α−β+γ+1
.
As
J
has
spectrum
−1,
,
,
, so that
values 1 − α+β
1
1+γ
γ+1
γ+1
γ+1
when (33) holds J1 has 2 negative, 2 positive eigenvalues. Therefore, Q1 is a saddle
point with a 2-dimensional stable manifold in π2 ∩ π4 and a 2-dimensional unstable
manifold. Thus, restricted to Σ, Q1 is a saddle point. The same reasoning applied
to Q2 shows that the 2-dimensional stable manifold S(Q2 ) is in π1 ∩ π3 and Q2
restricted to Σ is also a saddle point. Then condition (iii) of Theorem 4.2 is met.
The phase portraits on Σ ∩ πj , j ∈ I4 , are given in Figure 5. These show that
condition (iv) of Theorem 4.2 is satisfied. By Theorem 4.2, when (33) holds the
heteroclinic cycle Γ0 is a global repeller in the sense of Definition 1.1. Figure 6
shows the heteroclinic limit cycle in the phase portrait for the case β = 9/4, α =
1/2, γ = 3/2.
HETEROCLINIC LIMIT CYCLES
e1
e3
s
A
A
A
Q1 A
s
A
@ q
A
Rs 4
@
A
AUs
s
e2
e2
e4
s
A
A
A
Q2 s
A
A
@ q
A
Rs 1
@
A
AUs
s
(a)
e3
21
e3
(b)
e1
s
A
A
A
Q1 s
A
@ q
A
Rs 2
@
A
A
s
AUs
e4
e4
e2
s
A
A
A
Q2 s
A
@ q
A
@
Rs 3
A
A
s
AUs
(c)
e1
(d)
Figure 5. The phase portraits on Σ ∩ πj (1 ≤ j ≤ 4).
E4
E3
E2
E1
Figure 6. Dynamics of (29) with interaction matrix given by (30)
projected on the 3-dimensional probability simplex. Parameter values: β = 9/4, α = 1/2, γ = 3/2. The globally attracting heteroclinic cycle is E1 → E2 → E3 → E4 → E1.
22
ZHANYUAN HOU AND STEPHEN BAIGENT
5. Conclusion. For strongly competitive autonomous Kolmogorov systems, we
have explored the global dynamics when a heteroclinic limit cycle is a global attractor (repeller). Starting from three-dimensional systems, we have obtained necessary
as well as sufficient conditions for the existence of a globally attracting (repelling)
heteroclinic limit cycle. In particular, for three dimensional Lotka-Volterra systems,
we have shown that a locally attracting (repelling) heteroclinic limit cycle may not
necessarily be globally attracting (repelling). Then, for an N -dimensional system
with a three-dimensional subsystem as its limit system, i.e. the same N − 3 components of all solutions in intRN
+ vanish as t → +∞ (t → −∞), we have shown that
a globally attracting (repelling) heteroclinic limit cycle of the subsystem can also
be globally attracting (repelling) in intRN
+ under certain conditions. For general
N -dimensional systems, we have provided a sufficient condition for the existence of
a globally attracting (repelling) heteroclinic limit cycle. We have also demonstrated
the applications of our results by various examples.
There remain many outstanding problems of interest concerning stability of heteroclinic cycles. Even for the class of strongly competitive autonomous Kolmogorov
systems, to the best of our knowledge, not much is known about the global dynamics characterised by a globally attracting (repelling) heteroclinic limit cycle. We
conclude this paper with a few problems for future investigation.
5.1. Open Problem 1. In section 1 we mentioned that there are some deeper
results, based largely on Poincaré maps, on heteroclinic cycles for general dynamical
systems with symmetry (see, for example, [9, 10]) but we have not investigated
to what extent they can be applied to our system (1). Thus open problem 1 is
to investigate these results in the context of ecological models and use Lyapunov
function techniques rather than Poincaré maps. It would also be interesting to
investigate the subclass of systems (1) with symmetry.
5.2. Open Problem 2. The heteroclinic cycles in our results consist of only axial
fixed points and heteroclinic trajectories joining them. The 2nd open problem is to
investigate the possibility of globally attracting (repelling) heteroclinic limit cycles
that consist of fixed points not necessarily all axial and heteroclinic trajectories.
Find conditions for existence of such limit cycles.
5.3. Open Problem 3. For general system (1), Theorem 4.2 is only a sufficient
condition for the existence and global attraction (repulsion) of a heteroclinic limit
cycle. Open problem 3 is to explore alternative and weaker conditions.
Acknowledgement The authors are grateful to the referees for their comments
and suggestions adopted in this version of the paper.
REFERENCES
[1] V. S. Afraimovich, M. I. Raminovich and P. Varona, Heteroclinic contours in neural ensembles
and the winnerless competition principle, Internat. J. Bifur. Chaos, 14 (2004) 1195–1208.
MR2063888 (2005a:37166)
[2] P. Ashwin, O. Burylkob and Y. Maistrenko, Bifurcation to heteroclinic cycles and sensitivity
in three and four coupled phase oscillators, Physica D, 237 (2008) 454–466. MR2451599
(2009g:34101)
[3] S. Baigent and Z. Hou, Global stability of interior and boundary fixed points for LotkaVolterra systems, Diff. Eq. Dyn. Syst., 20(1) (2012) 53–66. MR2897758
[4] G. Butler and P. Waltman, Persistence in dynamical systems, J. Diff. Eq., 63 (1996), 255–263.
[5] C. Chi, S. Hsu and L. Wu, On the asymmetric May-Leonard model of three competing species,
SIAM J. Appl. Math., 58 (1998) 211–226. MR1610084 (99i:92018)
HETEROCLINIC LIMIT CYCLES
23
[6] M. Corbera, J. Llibre and M. A. Teixeira, Symmetric periodic orbits near a heteroclinic loop
in R3 formed by two singular points, a semistable periodic orbit and their invariant manifolds,
Physica D, 238 (2009) 699–705.
[7] B. Feng, The heteroclinic cycle in the model of competition between n species and its stability,
Acta Mathematicae Applicatae Sinica, 14 (1998) 404–413. MR1651271 (99k:92026)
[8] M. Field and J. W. Swift, Stationary bifurcation to limit cycles and heteroclinic cycles, Nonlinearity, 4 (1991) 1001–1043. MR1138125 (92k:58191)
[9] M. Krupa and I. Melborne, Asymptotic stability of heteroclinic cycles in systems with symmetry, Ergo. Th. & Dynam. Sys., 15 (1995) 121–147. MR1314972 (96g:58101)
[10] M. Krupa and I. Melborne, Asymptotic stability of heteroclinic cycles in systems with symmetry. II, Proc. Roy. Soc. Edin., 134A (2004) 1177–1197. MR2107489 (2006e:37086)
[11] M.W. Hirsch, Systems of differential equations that are competitive or cooperative III: competing species, Nonlinearity, 1 (1988) 51–71. MR0928948 (90d:58070)
[12] J. Hofbauer and K. Sigmund, On the stabilizing effect of predators and competitors on ecological communities, J. Math. Biol., 27 (1989) 537–548. MR1015011 (90m:92054)
[13] J. Hofbauer, Heteroclinic cycles in ecological differential equations, Tatra Mountains Math.
Publ., 4 (1994), 105–116. MR1298459 (95i:34083)
[14] J. Hofbauer and K. Sigmund, The Theory of Evolution and Dynamical Systems, Cambridge
University Press, New York, 1998.
[15] S-B Hsu and L-I W. Roeger, Heteroclinic cycles in the chemostat models and the winnerless
competition principle, J. Math. Anal. Appl., 360 (2009) 599–608. MR2561257 (2010m:92062)
[16] R.M. May and W.J. Leonard, Nonlinear aspects of competition between three species, SIAM
J. Appl. Math., 29 (1975) 243–253. MR0392035 (52:12853)
[17] K. Orihashi and Y. Aizawa, Global aspects of turbulence induced by heteroclinic cycles in
competitive diffusion Lotka-Volterra equation, Physica D, 240 (2011) 1853–1862.
[18] H. L. Smith, Periodic Orbits of Competitive and Cooperative Systems, J. Diff. Eq., 65 (1986)
361–373. MR0865067 (88c:58052)
[19] H.L. Smith and P. Waltman, The Theory of the Chemostat, Cambridge University Press,
Cambridge, UK, 1995. MR1315301 (96e:92016)
[20] H. Smith, Monotone Dynamical Systems, An Introduction to Theory of Competitive and
Cooperative Systems, Math. Surveys Monogr. 41, AMS, Providence, RI, 1995.
[21] Y. Takeuchi, Global Dynamical Properties of Lotka-Volterra Systems, World Scentific, Singapore 1996. MR1440182 (98d:92017)
[22] A. Tineo, Necessary and sufficient conditions for extinction of one species, Adv. Nonlinear
Stud., 5 (2005) 57–71. MR2117621 (2005k:34185)
[23] D. Xiao and W. Li, Limit Cycles for the Competitive Three Dimensional Lotka-Volterra
System, J. Diff. Eq., 164, (2000) 1–15. MR1761415 (2001d:34051)
[24] E. C. Zeeman and M. L. Zeeman, An n-dimensional Lotka-Volterra system is generically
determined by the edges of its carrying simplex, Nonlinearity, 15 (2002) 2019–2032.
[25] E. C. Zeeman and M. L. Zeeman, From local to global behavior in competitive Lotka-Volterra
systems, Trans. Amer. Math. Soc., 355 (2003) 713–734. MR1932722 (2004a:37128)
[26] M.L. Zeeman, Hopf bifurcations in competitive three-dimensional Lotka-Volterra systems,
Dyn. Stab. Syst., 8 No. 3 (1993) 189–217. MR1246002 (94j:34044)
[27] X-A Zhang and L. Chen., The global dynamic behaviour of the competition model of three
species, J. Math. Anal. and Appl., 245 (2000) 124–141.
[28] Z. Hou, Vanishing components in autonomous competitive Lotka-Volterra systems, J. Math.
Anal. Appl., 359 (2009) 302–310. MR2542176 (2010m:34075)
[29] Z. Hou and S. Baigent, Fixed point global attractors and repellors in competitive LotkaVolterra systems, Dyn. Syst., 26 No.4 (2011) 367–390. MR2852931
Received xxxx 20xx; revised xxxx 20xx.
E-mail address: z.hou@londonmet.ac.uk
E-mail address: s.baigent@ucl.ac.uk