1
advertisement

1
Long-Lasting Effects of Random Perturbations on Dynamical Systems
Eric Vanden-Eijnden
Courant Institute
1.2
1
0.8
y
0.6
0.4
0.2
0
−0.2
−0.4
Frontier Probability Days
Salt Lake City, 2016
−1
−0.5
0
x
0.5
1
Joint work with T. Grafke and T. Schaefer
Freidlin-Wentzell approach to LDT
Consider the SDE
dX = b(X)dt +
p
" (X)dW (t)
where W (t) is a Wiener process and " measures the noise amplitude.
The forward Kolmogorov equation associated with this SDE is
@t ⇢ = r ·
⇣
⌘
"
b⇢ + 2 r(a⇢) ,
T )(x)
a(x) = (
⇣
⌘
Using a WKB-type ansatz ⇢(x, t) = exp
" 1 (x, t) , to leading order
in ", (x, t) satisfies the Hamilton-Jacobi equation
@t
H(x, ✓) = b(x) · ✓ + 1
2 ✓ · a(x)✓
+ H(x, r ) = 0,
Variational representation formula for the solution
(x, t) =
inf
{'(s),s2[0,t] :
'(0)=x0 ,'(t)=x}
Z t
1
˙
2 0 |'
b(')|2
a ds,
1 (')u
|u|2
=
u
·
a
a
The role of the Quasi-Potential (QP)
LDP also important for long time behavior via the solution of H(x, r ) =
0, which defines the quasipotential
(x, y) = inf
inf
T >0 {'(t),t2[0,T ] :
'(0)=x,'(T )=y}
Z T
b(')|2
a dt
1
˙
2 0 |'
Quasipotential plays roughly the same role as the standard potential,
and is important on long time-scales, T ⇣ exp(" 1C) for some C > 0.
For example, around stable fixed point xa of ẋ = b(x), the nonequilibrium
stationary density is
⇢(x) ⇣ exp
⇣
" 1
(xa, x)
⌘
and if xa, xb are two adjacent stable fixed points of ẋ = b(x), the mean
first passage time from xa to xb is
⇣
⌧ (xa, xb) ⇣ exp " 1 (xa, xb)
⌘
NB: the case of Systems in Detailed-Balance
1.2
First exit time for gradient systems:
1
0.8
For systems of the type
dX =
rU (X)dt +
p
y
0.6
" dW (t)
0.4
0.2
0
−0.2
• Quasipotential reduces to potential U (x).
−0.4
−1
−0.5
0
x
0.5
1
• Mimimizer of action (aka maximum likelihood path, MLP) reduces to
mimimum energy path (MEP), that is, geometric location of heteroclinic
orbits joining two minima via a saddle point.
A MEP can be characterized geometrically as a curve
⇤ satisfying
1.5
0 = [rU ]?
0.5
position
where [·]? denotes the perpendicular projection to the curve.
1
0
−0.5
−1
−1.5
0
2
4
6
time
8
10
4
x 10
Illustration: Allen-Cahn equation in 2D
Example: Allen-Cahn in one- and two-dimensions
(Faris & Jona-Lasiinio (1d); E, Ren
& V.-E.)
Allen-Cahn energy for u : [0, 1]2 7! R:
E(u) =
Z
[0,1]2
1
2
|ru|2 +
1
4
1
(1
u2 )2 dx
with Dirichlet boundary condition: u = +1 on the right and left edges of [0, 1]2 ,
u = 1 on top and bottom ones.
Two minimizers of the Allen-Cahn energy
Simulations by W. Ren
O
o.j#O p ! #j/.
!
What if the dynamics is not in
detailed4 Examples
balance? 4.1 SDE: The Maier-Stein Model
As a first test for our method, we use the following example of a diffusion
process (SDE) first proposed by Maier and Stein [12]:
(
p
3
2
du D .u ! u ! ˇuv /dt C " d Wu .t/
(4.1)
p
1084
M.
HEYMANN
AND E. VANDEN-EIJNDEN
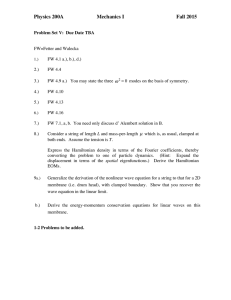
▷ Example from Maier & Stein
2
dv D !.1 C u /v dt C " d Wv .t/
0.4
0.3
0.2
v
0.1
0
−0.1
−1
β=1W and W are independent Wiener processes
β=10
where
and ˇ > 0 is a parameter.
u
v
0.4
(In [12], Maier and Stein use two parameters: #, which we set to 1 in this treatment, and ˛, which we call ˇ 0.3
in order to avoid confusion with the variable used to
parametrize the path '.˛/.)
0.2
For all values of ˇ > 0,v the SDE (4.1) has two stable equilibrium points at
.u; v/ D .˙1; 0/ and an unstable
equilibrium point at .u; v/ D .0; 0/ (see Fig0.1
ure 4.1). The drift vector field
0
"
!
3
2
u ! u ! ˇuv
(4.2)
b.u;
v/
D
2 /v
−0.1
!.1
C
u
−0.5
0
0.5
1
−1
−0.5
0
0.5
1
u
u
is the gradient of a potential if and only if ˇ D 1.
Detailed-balance
holds
only
β = 1
action paths from .u; v/ D .!1; 0/ to
F IGURE
4.1.
Thefor
minimum
.u; v/ D .1; 0/ for the Maier-Stein model (4.1) shown on the top of
For other values,
the lines
MLPofisthenodeterministic
longer the
reversed
of the
deterministic
the flow
velocity
field (gray
lines).
The param- path
eters are ˇ D 1 (left panel) and ˇ D 10 (right panel). When ˇ D 1, the
minimum action path is simply the heteroclinic orbit joining .˙1; 0/ via
.0; 0/; when ˇ D 10, nongradient effects take over, and the minimum
action path is different from the heteroclinic orbit.
The role of the Quasi-Potential (QP)
LDP also important for long time behavior via the solution of H(x, r ) =
0, which defines the quasipotential
(x, y) = inf
inf
T >0 {'(t),t2[0,T ] :
'(0)=x,'(T )=y}
Z T
b(')|2
a dt
1
˙
2 0 |'
Quasipotential plays roughly the same role as the standard potential,
and is important on long time-scales, T ⇣ exp(" 1C) for some C > 0.
For example, around stable fixed point xa of ẋ = b(x), the nonequilibrium
stationary density is
⇢(x) ⇣ exp
⇣
" 1
(xa, x)
⌘
and if xa, xb are two adjacent stable fixed points of ẋ = b(x), the mean
first passage time from xa to xb is
⇣
⌧ (xa, xb) ⇣ exp " 1 (xa, xb)
⌘
Geometric interpretation and Numerical counterpart
(x, y) = inf
=
inf
T >0 {'(t),t2[0,T ] :
'(0)=x,'(T )=y}
Z T
inf
0
{'(t),t2[0,T ] :
'(0)=x,'(T )=y}
Z T
1
˙
2 0 |'
b(')|2
a dt
˙ a|b(')|a
(|'|
h',
˙ b(')ia) dt
Reduce calculation of the quasipotential to that of a geodesic in a
(degenerate) Finsler metric.
Numerical counterpart: geodesic can be identified in practice by moving
a parametrized curve in configuration space
) String method (gradient systems) and Minimum action method
(non-gradient systems).
(E, Ren & V.-E.; Heymann & V.-E.)
Allen-Cahn/Cahn-Hilliard System
Consider the SDE system
with
p
1
3
d = ( Q(
)
)dt + "dW
↵
= ( 1, 2) and the matrix Q = ((1, 1), ( 1, 1)).
This system does not satisfy detailed balance, as its drift is made of
two gradient terms with incompatible mobility operators (namely Q and
Long-lasting effects of small random perturbations
17
Id).
1.0
0.5
2
Fig. 2 Allen-Cahn/CahnHilliard toy ODE model,
a = 0.01. The arrows denote
the direction of the deterministic flow, the color its
magnitude. The white dashed
line corresponds to the slow
manifold. The solid line
depicts the minimizer, the
dashed line the heteroclinic
orbit. Markers are located at
the fixed points (circle: stable;
square: saddle).
0.0
0.5
1.0
1.0
0.5
0.0
1
0.5
1.0
1
2
This system does not satisfy detailed balance, as its drift is made of
two gradient terms with incompatible mobility operators (namely Q and
Id).
Allen-Cahn/Cahn-Hilliard System
Consider next the SPDE
p
1
3
)
+ ✏⌘(x, t)
t = P ( xx +
↵
where P is an operator with zero spatial mean and ⌘(x, t) a spatiotemporal white-noise.
A
19
X
S
B
20
1.0
Tobias Grafke, Tobias Schäfer and Eric Vanden-Eijnden
1.0
B
0.8
0.5
(x)
s
A
0.0
1.0
1.0
0.5
0.0
x
0.5
0.5
0.0
x
0.5
1.0
1.100
B
0.733
0.367
S
0.6
0.000
0.4
0.733
0.2
1.100
0.0
X
0.367
0.733
A
1.0
0.5
0.0
x
0.5
1.100
1.0
1.0
Fig. 4 The configurations A, B, S, X in space: fA and fB are the two stable fixed points, fS is the
unstable fixed point on the separatrix in between. At point fX , the slow manifold intersects the
separatrix.
For P =
0.8
0.367
0.2
1.0
0.733
0.000
S
0.4
0.5
1.0
0.367
0.6
0.0
1.100
s
Long-lasting effects of small random perturbations
∂ 2 the system is a mixture of a stochastic Allen-Cahn [2] and Cahn-
Fig. 5 Transition pathways between two stable fixed points of equation (56) in the limit e ! 0.
Left: heteroclinic orbit, defining the deterministic relaxation dynamics from the unstable point
S down to either A or B. Right: Minimizer of the geometric action, defining the most probable
transition pathway from A to B, following the slow manifold up to X, where it starts to nearly
deterministically travel close to the separatrix into S.
On this manifold the motion is driven solely by changing the mean via the slow
1
2
20
Tobias Grafke, Tobias Schäfer and Eric Vanden-Eijnden
1.0
B
1.0
1.100
B
This system does not satisfy detailed
balance, as 0.733
its drift
is made of
0.8
0.8
0.367
two gradient terms with incompatible
mobility operators
(namely
S Q and
0.6
0.6
0.000
S
Id).
0.4
0.4
X
s
s
Allen-Cahn/Cahn-Hilliard System
0.367
0.2
0.733
0.2
1.100
0.733
0.367
0.000
0.367
0.733
A
A
1.100
1.100
0.0
0.0
Consider next the SPDE
1.0
0.5
1.0
0.5
0.0
0.5
1.0
0.0
0.5
1.0
x
x
p
1
3
)
+ ✏⌘(x, t)
t = P ( xx +
Fig. 5 Transition pathways between two stable fixed points of equation (56) in the limit e ! 0.
↵
Left: heteroclinic orbit, defining the deterministic relaxation dynamics from the unstable point
S down
to either A or B.
Right: Minimizer
of the⌘(x,
geometric
the most probable
where P is an operator with zero
spatial
mean
and
t)action,
a defining
spatiotransition pathway from A to B, following the slow manifold up to X, where it starts to nearly
deterministically travel close to the separatrix into S.
temporal white-noise.
ong-lasting effects of small random perturbations
1.0
X
(x) dx
0.5
0.0
On this manifold
p the motion is driven solely by changing the mean via the slow
21
terms, f + Tobias
e h(x,t),
on aTobias
time-scale
ofand
order
in a. After two integrations
Grafke,
Schäfer
EricO(1)
Vanden-Eijnden
in space, (60) can be written as
22
Fig. 7 Action along the min0.07
slow manifold
imizer. Note
that the action
kfxx + f Xf 3 = lS
(61)
0.06
string
is non-zero climbing up the
minimizer
slow-manifold,
but diminishes
where l is a parameter:
0.05 As a result the slow manifold can be described as oneto zero already at X whenparameter
it
families of solutions parametrized by l 2 R – in general there is more
0.04
approaches the separatrix,than one family because
the manifold can have different branches corresponding to
before it reaches S.
0.03
R
S
A
dS
solutions of (59) with a different number of domain walls. The configuration labeled
as fX in Fig. 4 shows
the field at the intersection of one of these branches with the
0.02
separatrix. Since the deterministic drift along the slow manifold is small compared
0.5
to the O(1/a) drift0.01
induced by the Cahn-Hilliard term, one expects that the most
probable transition 0.00
pathway will use this manifold as channel to escape the basin
1.0
of attraction of the 0.01
stable fixed points fA or fB . This intuition is confirmed by the
1.5
1.0
0.5 0.0
0.5
1.0
1.5
numerics, as shown next.
R
0.2
0.4 connecting
0.6
0.8the two
1.0stable fixed points
(x) A (x) dx
Fig. 5 (left) shows the0.0
heteroclinic
orbit
fA and fB to the unstable configuration fS .sThe mean is preserved along this orbit, which involves a nucleation event at the boundaries followed by domain wall
ig. 6 Projection of the heteroclinic orbit and the minimizer of the action functional
a 2- the domain. The unstable fixed point fs , denoted by S, which also
motioninto
through
imensional plane. The x-direction is proportional to its component
in the direction
of the we
initial
demarcates
the
position
at which
the separatrix
the26spatially
symmetric
The numerical
parameters
used
in these
computations
are Nsis=crossed,
100, Nis
,
x=
B
Bistable Reaction Network
Consider the bi-stable chemical reaction network
k0
k2
A ⌦ X,
2X + B ⌦ 3X
k1
k3
with rates ki > 0, and where the concentrations of A and B are held
constant.
Its dynamics can be modeled as a Markov jump process (MJP) with
generator
(LR f )(n) = A+(n) (f (n
1)
f (n)) + A (n) (f (n + 1)
with the propensity functions
8
<A (n)
+
:A (n)
= k0V + (k2/V )n(n 1)
= k1n + (k3/V 2)n(n 1)(n
2) .
f (n))
Bistable Reaction Network
Denote by c = n/V the concentration of X, and normalize it by a typical
concentration, ⇢ = c/c0. Set " = 1/(c0V ) and rescale time by ":
✓
1
R
(L✏ f )(⇢) =
a+(⇢) (f (⇢
✏
where
f (⇢)) + a (⇢) (f (⇢ + ✏)
✏)
8
<a (⇢)
+
:a (⇢)
◆
f (⇢)) ,
= 0 + 2 ⇢2
= 1 ⇢ + 3 ⇢3 .
Large deviation principle can be formally obtained via WKB analysis,
1 G(⇢)
✏
that is, by setting f (⇢) = e
and expanding in ". To leading
order in ✏, this gives an Hamilton-Jacobi operator associated with an
Hamiltonian that is also the one rigorously derived in LDT:
H(⇢, #) = a+(⇢)(e#
1) + a (⇢)(e #
1) .
Bistable Reaction Network
Consider N neighboring reaction compartments, each well-stirred, but
with random jumps possible between neighboring compartments.
Denote by ⇢i the concentration in the i-th compartment and refer to the
PN
⇢
⇢
vector as the complete state, = i=0 ⇢iêi. In this case, we obtain a
di↵usive part of the generator, LD , coupling neighboring compartments.
For a di↵usivity D, it is
N
⇣
X
D
D
⇢) =
⇢
(L f )(⇢
⇢i f (⇢
✏ i=1
⇢
✏êi + ✏êi 1) + f (⇢
✏êi + ✏êi+1)
⌘
⇢) .
2f (⇢
The process associated with this generator also admits a large deviation
principle with Hamiltonian
⇢, # ) = D
H D (⇢
N
X
i=1
⇣
⇢ i e #i
1
#i + e#i+1 #i
Full Hamiltonian becomes
⇢, # ) = H D (⇢
⇢, # ) +
H(⇢
N
X
i=1
H R (⇢i, #i)
⌘
2 ,
Bistable Reaction Network
32
Tobias Grafke, Tobias Schäfer and Eric Vanden-Eijnden
string
forward minimizer
backward minimizer
1.6
1.4
x2
1.2
1.0
0.8
0.6
0.6
0.8
1.0
x1
1.2
1.4
1.6
Fig. 15 Bi-Stable reaction-diffusion model with N = 2 reaction cells. Show are the forward (red)
and backward (green) transitions between the two stable fixed points, in comparison to the heteroclinic orbit (dashed). The flow-lines depict the deterministic dynamics, their magnitude is indicated
by the background shading.
Fig. 16 Action densities
Continuous limit in space
e 19.
1.0
1.600
1.478
0.8
1.356
1.233
0.6
s
Rescale
1.111
0.989
0.4
⇢j ! h⇢(jh),
✓j ! ✓(jh),
0.2
0.867
a±(⇢j ) ! ha±(⇢(jh))
0.744
0.622
0.0
0.0 arrive
0.2
0.4at
In the limit h ! 0, if we scale D ! Dh 2 we
Z ⇣
0.500
0.6
0.8
1.0
x
⌘
2
H d(⇢, ✓) =Figure
D 19.⇢|@
✓@x2⇢ Schlögl
dx . model, forward transition, for D = 6,
x ✓| +
Spatially
continuous
512, Nx = 32. The location of the saddle point is marked with a dashed line.
1.0
1.600
1.0
1.600
1.478
0.8
1.478
0.8
1.356
1.356
1.233
1.233
0.6
0.6
1.111
s
s
1.111
0.989
0.4
0.989
0.4
0.867
0.867
0.744
0.2
0.744
0.2
0.622
0.622
0.0
0.500
0.0
0.2
0.4
0.6
x
0.8
1.0
0.0
0.500
0.0
0.2
0.4
0.6
0.8
1.0
x
backward
forward
Figure
20.
Spatially
continuous
Schlögl
model, backward transition, for D = 6,
Spatially continuous Schlögl model, forward transition, for D = 6, N =
Fast-Slow Systems
Systems with a slow variable X evolving on a timescale O(1) and a fast
variable Y on a time scale O(↵):
Ẋ = f (X, Y )
1
1
dY = b(X, Y )dt + p (X, Y )dW.
↵
↵
Limit behavior captured by Law of large numbers (LLN):
X̄˙ = F (X̄)
where
Z
1 T
F (x) = lim
f (x, Yx(⌧ )) d⌧
T !1 T 0
Small deviations captured by Central Limit Theorem (CLT); large deviation captured by LDP with the Hamiltonian
Z T
1
H(x, #) = lim
log E exp #
f (x, Yx(t)) dt
T !1 T
0
!
,
2but b
>
non-quadratic,
furthermore
existence of a forbidd
Ẋ
=
Y
X
D(Xbecause
X.2As
)of the
>
>
1
1
1
1in
2
1
>
variable), the Hamiltonian
(83)
is
non-quadratic
q
a
consequence
no S(P)
>
>
Ẋ2 = Yis2 not b
>
2 X2 D(X2 X1 )
g 2 /(2s
)
where
the
Hamiltonian
defined.
>
<
interesting for our purpose not only because
the
Hamiltonian
is
2
>
b2 X2variable
D(X
X1of
) has
with Gaussian noise Additionally
exists
forY2theincreasing
slow
an LDP
tosdescribe
>
2 which
<Ẋ2 =
1
the
number
degrees
of
freedom
by com
ut furthermore because of the existence oftransitions
a forbidden
region
J
>
1
s
p
dY
=
g(X
)Y
dt
+
dW
correctly.
1
1 coupling
1
1spri
dependent
multi-stable
slow-fast
systems
and
them
by
a
>
p
dY
=
g(X
)Y
dt
+
dW
1
1
1
1
a
>
aan expec
>
he Hamiltonian is not defined.
>
The implicit nature
of
the
Hamiltonian
(83),
in
particular
containing
a
>
a
constant
D,
the
full
system
reads
>
>
1
s
>
>
>
1 >
s
ncreasing the number of degrees of freedom
combiningnumerical
two
intion,by
complicates
procedures
to
compute
its
associated
minimizers.
:
>
dY2 dt
g(X22. )Y2 dt + p dW2 . Y
2=
:dY2 =
g(X8
+2 pa dW
2 )Y
Ẋ1 = Y1 ba
X2 ) aon the f
>
1 X1theD(X
1 variable
in by
theanon-trivial
case
of a quadratic
of
slow
a dependence
>
stable slow-fast systems and coupling them
spring with
spring
>
>
2
>
Ẋ
=
Y
b2 X2 D(X2 X1 )
>
ones,
for
example,
2
2
<
ull system reads
8
Thefor
Hamiltonian
LDTisfor
1 this system
s is
The Hamiltonian
the <
LDT
thisbthe
system
Ẋ =for
Y 2for
X>dY
p
=
g(X
)Y
dt
+
dW1
1
1
1
8
a
>
a
(
1 >
s
2 b X
>
>
1
s
Ẋ
=
Y
D(X
X
)
>
1
1 1
1
2
g(X)Y
dt=
H(x1 , x2 , J1 , J:
)dY
= 1=
h(x
+
h(x
, h(x
Jp
+,dW
h)Y12)—U(x
),22J). +
i , h —U
1
>
2H(x
1 ,, J
11)>
2+
2)
1 ,2x,dW
2J
,
x
J
,
J
)
=
J
+
h(x
:
p
dY
g(X
dt
+
2
2
1
>
2
2
a
>
aa
a
>Ẋ = Y 2 b X D(X X )
Fast-Slow Systems - Example
>
<
2
2
dY1 =
>
>
>
>
>
>
:dY2 =
34
2 2
2
1
1
2
for
y) =
y)anand
Jthe
) LDT
defined
asHamiltonian
in equation
(85).
ch
oneU(x,
indeed
does
obtains
explicit
formula
for
the
(83)
(as The
derived
1 h(x,
2 and
2 D(x
1
s
The Hamiltonian
for
for
this
system
is
for
U(x,
y)
=
D(x
y)
h(x,
J
)
defined
as
in
equ
(86) 2two stable fixed points. The deterministic dyna
g(X1 )Y1 dt + p dW1g(X)
[6]) = (X 5)2 + 1 ensures
✓
◆ points. The
2 + 1 ensures
q
a
a
g(X)
=
(X
5)
two
stable
fixed
H(x1 , xof
) = h(x1 , J
—U(x
1the
2, J
1 , J2averaged
1 ) + h(x
2 ,2J2 ) + h are
1 , x2 ),
of this system (i.e.
the
evolution
slow
variables)
depicte
2 (x)
1
s
h(x,
J
)
=
b
xJ
+
g(x)
g
2s
J
.
(
2
of
this
system
(i.e.
the
evolution
of
the
averaged
slow
va
g(X2 )Y2 dt + p dW2white
.
arrows in figure 17 (left). To
1 stress 2the important portion of the transition
for
U(x,
y)
=
y) (left).
and h(x,
) defined
in equationpor
(85
a
a
2 D(x 17
white arrows in figure
ToJstress
theasimportant
jectory, the plot is focused
only5)on
initialtwo
state
up to
thepoints.
saddle.
Compared
2 +the
g(X)
=
(X
1
ensures
stable
fixed
The
determin
Tobias Grafke,the
Tobias
Schäfer
and Eric
Vanden-Eijnden
plot
is
focused
only
on
the
initial
state
up
to th
the minimizerjectory,
and of
thethis
heteroclinic
orbits
connecting
the
stable
fixed
points
to
system (i.e. the evolution of the averaged slow variables)
a
saddle point. The
corresponding
are
shown
inorbits
figure
17
(right).
The
the minimizer
the 17
heteroclinic
connecting
the
s
white arrowsand
in actions
figure
(left).
To stress
the important
portion
ofspe
the
for the LDT for this system is
6.5
minimizer
x2 , J1 , J2 ) = h(x
6.0 1 , J1 ) + h(x2 , J2 ) + h
string
3
S ⇡ 2.00 · 10
jectory,
theThe
plotminimizer,
is focused
on actions
the initialare
stateshown
up to the
0.05
saddle
point.
corresponding
insaddle.
figure
—U(x1 , x2 ), J i ,
(87) string, S ⇡ 1.04only
· 10 2
the minimizer and the heteroclinic orbits connecting the stable fixe
saddle
0.04 point. The corresponding actions are shown in figure 17 (right
x2
dS
D(x y)2 and5.5h(x, J ) defined as in equation (85). The choice
5.0 stable fixed points. The deterministic dynamics
+ 1 ensures two
0.03
4.5 of the averaged slow variables) are depicted as
.e. the evolution
figure 17 (left).4.0
To stress the important portion of the transition
0.02 trais focused only3.5on the initial state up to the saddle. Compared are
nd the heteroclinic orbits connecting the stable fixed points0.01
to the
3.0
e corresponding actions are shown in figure 17 (right). The specific
0.00
2.5
3.5
4.0
4.5
5.0
x1
5.5
6.0
6.5
0.0
0.2
0.4
0.6
s
0.8
1.0
Conclusions
• LDT can guide the development of numerical tools that bypass the brute-force
integration of SPDE.
• Gives rough estimate of probability, along with the path of maximum likelihood by
which the event occurs.
• Applicable to systems in detailed-balance or not, on finite or unbounded time intervals.
• Can be integrated in importance sampling procedures and data assimilation
techniques.
• Can also be used in other context, e.g. to understand stochastic resonance effects in
excitable media, phase transition in unbounded domains, etc.
• More challenging are situations where LDT does not apply directly because entropic
effects are non-negligible.
Some other applications
▷
Thermally induced magnetization reversal in submicron ferromagnetic elements
with Weinan E and Weiqing Ren
a)
1
S2
S3
b)
C3,4
1
1
V5,6
V3,4
S
1
3
V2
1
V24
2
V8
V2
5
C
1
5,6
V15,16
S
8
V1
13,14
with Tommy Miller and David Chandler
Rate limiting step is entropic creation of a water bubble
1
V9,10
2
V6
V2
7
S
5
V111,12
C
7,8
S
S
6
7
0
m
1
Hydrophobic collapse of a polymeric chain
by dewetting transition
1
V7,8
C1,2
0
−1
−1
▷
S4
V2
V22
V1,2
m2
Practical side of LDT - Dynamics
can be reduced to a Markov jump
process on energy map, whose
nodes are the energy minima and
whose edges are the minimum
energy paths.
1
1
Beyond LDT - when entropy matters
• LDT can fail if entropic effects matter - many alternative paths for the event, with lower probability individually, but large one globally.
• These situations require a more general approach to rare event analysis.
Energy at kT =0.5
2
1.5
1
0
1.2
1
−0.5
0.8
0.6
−1
y
y
0.5
0.4
0.2
−1.5
0
−0.2
−2
−1.5
−1
−0.5
0
x
0.5
1
1.5
−0.4
−1
−0.5
0
x
0.5
1
Some references
W. E, W. Ren, and and E.V.-E., “String method for the study of rare events,'' Phys. Rev. B. 66,
052301 (2002).
W. E, W. Ren, and E.V.-E., “Minimum action method for the study of rare events,”
Comm.Pure Applied Math. 52, 637-656 (2004)
M. Heymann and E.V.-E., “Pathways of Maximum Likelihood for Rare Events in
Nonequilibrium Systems: Application to Nucleation in the Presence of Shear,” Phys. Rev.
Lett. 100,140601 (2008).
M. Heymann and E.V.-E., “The Geometric Minimum Action Method: A least action principle
on the space of curves,” Comm. Pure. App. Math. 61(8), 1052-1117 (2008).
T. Grafke, R. Grauer, T. Schafer, E.V.-E. , “Arclength parametrized Hamilton's equations for the
calculation of instantons,” SIAM Multiscale Modeling & Simulation 12, 566-580 (2014).
F. Bouchet, T. Grafke, T. Tangarife and E V.-E., “Large Deviations in Fast–Slow Systems.”
J. Stat. Phys. 162, 793-812 (2015).
J. Weare and E.V.-E., “Rare event simulation of small noise diffusions,” Comm. Pure App.
Math. 65, 1770-1803 (2012).