Realization and Analysis of Video Frame Reflector Using MATLAB

International Journal of Engineering Trends and Technology (IJETT) – Volume 23 Number 7- May 2015
Realization and Analysis of Video Frame
Segmentation for Position Control of Parabolic Solar
Reflector Using MATLAB
Kirti Chaurasiya
#1
, Satish Kumar
#2
#
Department Of Electronics and Communication Engineering
Amity School of Engineering & Technology
Amity University, Lucknow Campus, India
Abstract
— The amount of solar power captured by a proposed for positioning solar equipment, such as: closedparabolic reflector determines the output power generated for solar cell or electrical phenomenon applications. loop, open loop and hybrid systems [9-13].
On one hand, a tracking open loop system, does not compare Hence, correct parabolic sun tracking systems have a crucial role within the performance of solar collecting technologies. Although, analysis during this filed, low value and easy tracking systems that exactly keep the angle of read through the sun mechanical phenomenon, continues to be a challenge that has to be met by designer to include it during a sensible system while not compromising accuracy. During this paper the look, implementation and analysis of a compact two-axis parabolic solar tracking system with camera is conferred.
The system consists of an online camera that is figure as video process based mostly sensing element connected to a the control variable with a reference, that is, the controller is based on a mathematical model where the sun position is calculated by computing algorithms [14 -17]. On the other hand, a tracking closed loop system is based on feedback control, operational amplifiers (op -amps) and light dependent resistor [18-20] or phototransistors [21-22] sensors are used for it low cost implementation.
In addition, because the orientation of azimuth and zenith reference angles must be very accurate, sensors calibration and a system-complex installation are required. Another form of closed-loop solar tracking can be realized by using a video hybrid linear mechanism with DC motor that computes a sun-positioning algorithmic rule. The developed structure, by eliminating pricey computing systems, permits control system sun tracking as straightforward, low value with bottom configuration.
Keywords— video frame segmentation, hybrid linear camera that captures videos of the sun or a sensor shade the captured video is sent to a computer system that performs video processing to detect a position point that is compared with a reference to find an error, thus the controller performs the corresponding control action to correct the error [2, 23actuator, parabolic solar reflector and solar cell
I. INTRODUCTION
24]. In this article the design is presented, implementation and evaluation of a sun tracking system that uses closed-loop video processing.
II. METHODOLOGY
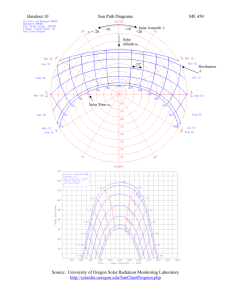
The sun has an apparent motion with respect to a particular orientation of a plane on the earth, which can be described in terms of angles [1]. The first angle goes from east to west and it is called azimuth angle, the second angle is the sun elevation
Web camera is that the main sensing element. It plays the most important role to create certain the sun continuously within the ways that so as to urge higher potency of solar cells. It primarily captures the video of sun from the or complementary angle called the zenith angle. A solar tracking system must orientate the parabolic solar collector moving its collecting surface in these two angles. Because these movements a parabolic solar collector will not have fixed position [2]. A sun tracking system plays an important atmosphere and detects the presence of the targeted object.
Video process is completed to work out the offset of the article from the middle position of the camera field of read, role in parabolic solar collectors since the maximum received solar irradiation depends on its precision and accuracy [3]. In a two-axis solar cell in parabolic solar tracking systems it is and so leading the mechanism to align the middle of the image to the center of mass of the image. Figure 4 shows the flow chart. possible to generate more than 40% energy compared to a fixed [4-7]. In the case of parabolic solar collector with concentration, the tracking system must be very precise, to ensure good solar cell behaviour [8]. Over time different types of system structures and control algorithms have been
ISSN: 2231-5381 http://www.ijettjournal.org
Page 335
International Journal of Engineering Trends and Technology (IJETT) – Volume 23 Number 7- May 2015
B) Gradient Magnitude
Start
Camera capture sun video
Use the Sobel edge masks, imfilter, and some simple arithmetic to compute the gradient magnitude. The gradient is high at the borders of the objects and low (mostly) inside the objects. This function (rgb2gray) converts color image into a gray scale image. This operation is done because MATLAB functions are performed only on gray images.
Video process in
MATLAB programming
No
Find the centroid
Yes
Output angle goes to hybrid linear actuator
Motor move to center the parabolic reflector position to sun
Reflector reflect the sun irradiation to solar cell
Electricity store in battery
Fig.1. Flow chart
A) Video Frame Segmentation
A sample video with a stationery background and a single object moving is considered. This video is converted into frames using software. Video to image converter is the software used. This converts the input video file into images of jpg format. These images are provided in sequence as input to the program. This operation (imread) reads an image given as input and stores it in the form of a matrix. The pixels of the image can be read by using array editor.
Fig.3. Gradient magnitude
C) Opening – Closing By Reconstruction
Opening is erosion followed by dilation, while opening-byreconstruction is erosion followed by a morphological reconstruction. First, compute the opening using imopen. Next compute the opening-by-reconstruction using erosion and reconstruct. Tracking the opening with a closing can remove the dark spots and stem marks. Compare a regular morphological closing with a closing-by-reconstruction. Now uses dilate followed by reconstruct. It must complement the image inputs and output of reconstruct. As it can reconstruction-based opening and closing are more effective than standard opening and closing at removing small blemishes without affecting the overall shapes of the objects.
Calculate the regional maxima of Iobrcbr to obtain good foreground markers.
Fig.2. Frame Segmentation
Fig.4. Opening- closing by reconstruction
D) Modified Regional Maxima Superimposed on Original
Image
The function can be used to modify an image so that it has regional minima only in certain desired locations. Here it use
ISSN: 2231-5381 http://www.ijettjournal.org
Page 336
International Journal of Engineering Trends and Technology (IJETT) – Volume 23 Number 7- May 2015 impose to modify the gradient magnitude image so that its only regional minima occur at foreground and background marker pixels.
Fig.7. Centroid of segmented frame
TABLE.1
CENTROID ANGLE
I1 Φ (angle between sun deflection)
Zenith angle=angle
Φ + sun deflection
Altitude angle=90°zenith angle
1 63.7647 63.7647 26.2353
Fig.5. Regional maxima
E) Threshold Opening-Closing by Reconstruction
In the cleaned-up image, the dark pixels belong to the background, so you could solart with a thresholding operation.
The background pixels are in black, but ideally we don't want the background markers to be too close to the edges of the objects this process are trying to segment. This paper will
"thin" the background by computing the "skeleton by influence zones" of the foreground of (bw).
Fig.6. Threshold opening-closing by reconstruction
F) Centroid of Segmented Frame
Number of object block shows how many object appear in the image after the system count the presence of the object. The only one object is considered to make sure the system can perform the task smoothly.
Otherwise, the object could be failed to be tracked. Insert label block is used to type any label to show the appearance of the object. Here, the label is represented by “sun detected”. Compute the centroid of each frame sun image, and superimpose its location on the image.
14
15
16
17
10
11
12
13
6
7
8
9
2
3
4
5
1.2920
1.0467
1.0672
0.9139
0.7942
0.8583
1.0090
0.6347
0.4911
0.6202
0.7400
0.2405
0
0
0
0
65.0567
66.1032
67.1704
68.0843
68.8785
69.7368
70.7457
71.3804
71.8716
72.4917
73.2317
73.4722
0
0
0
0
24.9433
23.8968
22.8296
21.9157
21.1215
20.2632
19.2543
18.6196
18.1284
17.5083
16.7683
16.5278
90
90
90
90
18
19
0
0
0
0
90
90
20 0 0 90
G) Hybrid Linear Actuator
This model implements a hybrid actuator consisting of a DC motor plus lead screw in series with a piezoelectric stack. The
DC motor and lead screw combination supports large displacements (tens of millimeters), but is dynamically slow when tracking the reference demand. Conversely the piezoelectric stack only supports a maximum displacement of
+-0.1mm, but has a very fast dynamic response. The two actuator technologies are a large stroke actuator with precision control results. Run the model with the Manual Switch in the up position to see the tracking of a small demand. The Piezo
Stack Demand scope shows that the initial motion is provided by the piezoelectric stack, and this is then washed out as the
DC Motor rotor angle moves to the new operating point. Set
ISSN: 2231-5381 http://www.ijettjournal.org
Page 337
International Journal of Engineering Trends and Technology (IJETT) – Volume 23 Number 7- May 2015 the Manual Switch to the down position to run a larger step,
in general use. The Optical Concentration Ratio
and rescale the scopes.
( ) can be calculated using equation 1 as follow
[25]
H) PWM & H-Bridge
(1)
For validation purpose the simulation mode can be set to
PWM in both the controlled PWM and H-Bridge blocks. In order to control the position of a DC motor, we must be able to change the current direction to the motor. This can be accomplished by using four power transistors arranged in an
H configuration around the DC motor. In this paper the image will process by using MATLAB video processing tool. It will be used to determine the center position of the sun. The signal will be created from the MATLAB programming to create the
PWM (Pulse Width Modulation) to control the speed of motor.
The signal from the video segmentation produce negative and positive signal. The signal positive signal will generate the forward rotation and the negative signal will generate backward rotation. The output signal is applied at the H bridge circuit and amplified with Op amp. The op amp is used to amplify the signal to increase the value of the output voltage.
This two sound card will control the motor at tilt rotation and pan rotation. The rotation of the motor is used to make the position of the camera center with the sun position.
Where (I
r
) represent integration over the receiver area (A
r
) is 0.785 and (I
o
) the insulation incident on the collector aperture [4].The Geometric
Concentration Ratio can be defined as the area of the collector aperture A
a
is 7.065 divided by the surface area of the receiver A
r
and can be calculated by Eq.2
Where A
a
(2) is the area of collector and A
r
is the area of receiver. Optical concentration ratio relates directly to lens or reflector quality; however, in many collectors the surface area of the receiver is larger than the concentrated solar image directory.
I) Solar Cell
This diagram optimizes the solar cell blocks parameters to fit data define over a range of different temperatures. It uses the
MATLAB optimization function fm in search. Other products available for performing this type of parameter the
Bioelectronics models are the optimization toolbox and the
Simulink Design Optimization. These products provide predefined function to manipulate and analyze blocks using
GUI or a command line approach .
Fig.1. Block diagram of parabolic solar reflector
III. RESULT AND DISCUSSION
There are two test of the experiment that has done to test the efficiency of solar cell. The test is making the comparison between the efficiency of solar cell at the parabolic solar reflector and horizontal position. Thus, the measurement of the voltage, and temperature of the solar cell surface for both solar cell are recorded. Then, the results are recorded for every
30 minute when the sun ray is at the highest temperature. The result of the experiment has been done from 12:00 pm until at
17:00 p.m. The results are including the measurement of rotor angle, voltage, current and average power of solar surface area.
Fig.8. Solar cell block diagram
J) Parabolic Solar Reflector
The "concentration ratio" of parabolic solar reflector is used to describe the amount of light energy concentration achieved by a given collector.
Two different definitions of concentration ratio are
ISSN: 2231-5381 http://www.ijettjournal.org
Page 338
International Journal of Engineering Trends and Technology (IJETT) – Volume 23 Number 7- May 2015
R EFERENCE S
[1] Benford, F.; Bock, J. A time analysis of sunshine.
Trans. Of American Illumination Engineering Society
1939 , 34 , 200.
[2] Arbab, H. And Jazi, B.; Rezagholizadeh, M. A computer tracking system of solar dish with two-axis degree freedoms based on picture processing of bar shadow. Renewable Energy 2009 , 34 , 1114–1118.
Fig.10. Graph Voltage vs Time
[3] Chong, K.K. and Wong, C.W. General formula for on-axis sun-tracking system and its application in improving tracking accuracy of solar collector. Solar
Energy 2009 , 83 , 298–305.
[4] Abdallah, S. The effect of using sun tracking systems on the voltage-current characteristics and power generation of flat plate photovoltaics. Energy
Conversion and Management 2004 , 45 , 1671–1679.
[5] Abdallah, S. And Nijmeh, S. Two axes sun tracking system with PLC control. Energy conversion and management 2004 , 45 , 1931–1939.
[6] Chen, F.; Feng, J. Analogue sun sensor based on the optical nonlinear compensation measuring principle.
Measurement Science and Technology 2007 , 18 ,
2111–2115.
[7] Sungur, C. Multi-axes sun-tracking system with PLC control for photovoltaic panels in Turkey. Renewable
Energy 2009 , 34 , 1119–1125.
Fig.11. Graph Current vs Time
IV. CONCLUSIONS
In this work a parabolic solar reflector has been designed according to corresponding theoretical data. The parabolic concentrator has high sun light reflectivity (up to 76%). Sun tracking system with the web camera might provide significant impact in solar energy efficiency. It is not only can cut the cost of the hardware setup, but also can increase the efficiency of the solar cells. This result get the 157 wt average mean power from this design of parabolic solar reflector based sun tracking system. Although this work is in photovoltaic, this research can go beyond the expectation for the future. The sun can be tracked with the parabolic solar reflector, the voltage, current and power received will always be at the maximum of the efficiency. If the efficiency becomes the matter of the improvement of the solar cells, with this study we can improve the problems. This research can be continued and upgraded to get the higher efficiency to the maximum level.
[8] Cope A.W.G.; Tully N. Simple tracking strategies for solar concentrations. Solar Energy 1981 , 27 , 361–
365.
[9] Mousazadeh. Title of the cited article. Journal Title
2007 , 6 , 100–110.
[10] Lee, C.Y.; Chou, P.C.; Chiang, C.M.; Lin, C.F. Sun
Tracking Systems: A Review. Sensors 2009 , 9 ,
3875–3890.
[11] Arasu, A.V.; Sornakumar, T. Design, development and performance studies of embedded electronic controlled one axis solar tracking system. Asian
Journal of Control 2007 , 9 , 163–169.
[12] Nuwayhid, R.Y.; Mrad, F.; Abu-Said, R. The realization of a simple solar tracking concentrator for university research applications. Renewable energy
2001 , 24 , 207–222.
ISSN: 2231-5381 http://www.ijettjournal.org
Page 339
International Journal of Engineering Trends and Technology (IJETT) – Volume 23 Number 7- May 2015
[13] Rubio, F.R.; Ortega, M.G.; Gordillo, F.; Lopez, M.
Application of new control strategy for sun tracking.
Nuclear Safety Agency (ARPANSA), December
2006.
Energy Conversion and Management 2007 , 48 ,
2174–2184.
[14] Michalsky J. J. The Astronomical Almanac’s algorithm for approximate solar position (1950 –
2050). Solar Energy 1988 , 40 , 227–235.
[15] Blanco-Muriel, M.; Alarcón-Padilla, D.C.; López-
Moratalla, T.; Lara-Coira, M. Computing the solar vector. Solar Energy 2001 , 70 , 431–441.
[16] Reda I.; Andreas A. Solar position algorithm for solar radiation applications. Solar Energy 2004 , 7 6 ,
577–589.
[17] Grena, R. An algorithm for the computation of the solar position. Solar Energy 2008 , 82 , 462–470.
[18] Kalogirou, S.A. Design and construction of a oneaxis sun-tracking system. Solar energy 1996 , 57 ,
465–469.
[19] Aiuchi, K.;nakamura, M.; Yoshida, K.; Katayama,
Y.; Nakamura, K. Sun tracking photo-sensor for solar thermal concentrating system. ASME 2004.
[20] Wang, F.; Feng, J. Title of the cited article. Journal
Title 2007 , 6 , 100–110.
[21] Khalifa, A.J.N.; Al-Mutawalli, S.S. Effect of twoaxis sun tracking on the performance of compound parabolic concentrators. Energy Conversion and
Management 1998 , 39 , 1073–1080.
[22] Roth, P. And Georgiev, A. And Boudinov, H. Design and construction of a system for sun-tracking.
Renewable energy 2004 , 29 , 393–402.
[23] Berenguel, M.; Rubio, FR; Valverde, A.; Lara, PJ;
Arahal, MR; Camacho, EF; López, M. An artificial vision-based control system for automatic heliostat positioning offset correction in a central receiver solar power plant. Solar Energy 2004 , 76 , 563–575.
AUTHOR’S BIBLIOGRAPHY
Ms Kirti Chaurasiya is presently pursuing M.Tech in
Electronics and Communication Engineering from Amity
University, Lucknow, Uttar Pradesh. She has done B.Tech degree course in Electronics & Communication Engineering from Dr Ram Manhor Lohia Avadh University Faizabad Uttar
Pradesh in 2013. Presently, she has focused her working area within of parabolic reflector. Her research interests also include Efficiency Improvement of Solar Cell Using
Compound Parabolic Concentrator and Sun Tracking System using MATLAB.
Sh. Satish Kumar, M.Tech, FIETE is an alumnus and gold
340edallist of IIT Roorkee (Erstwhile University of Roorkee).
He has worked as General Manager and Chief Vigilance
Officer in India„s first PSU, ITI Ltd. Bangalore. He has more than 34 years of industrial experience on state-of-the-art telecom equipment and infrastructure dealing with turn-key projects. His professional experience covers the whole spectrum of switching, transmission, access, telemetry and subscriber premises equipment. He also worked for providing design, system integration and Value Engineering results for various network based turn-key projects like Army Static
Communication Network (ASCON), Integrated Electronic
Warfare System (IEWS), Defence Communication Network
(DCN), Tactical Communication System (TCS), Network For
Spectrum (NFS) etc., Presently he is working as Professor,
(Electronics & Communication Engineering) Amity
University Lucknow campus.
ACKNOWLEDGEMENT
The authors would like to thank Maj. General K. K. Ohri
(AVSM, Retd.) Pro-VC & Director General, Amity University,
Uttar Pradesh Lucknow, Wg. Cdr. (Dr.) Anil Kumar (Retd.)
(Director ASET, Lucknow Campus), Brig. U. K. Chopra
(Director AIIT & Dy. Director ASET) and Prof. O. P. Singh
(HOD, Electronics) for their valuable comments and suggestions that helped to improve this paper.
[24] Minor M. Arturo, García P. Alejandro. High–
Precision Solar Tracking System. Proceedings of the
World Congress on Engineering 2010, London, U.
K., June 30 – July 2;
[25] Radiation Protection Standard: Occupational exposure to ultraviolet radiation, radiation protection series no.12. Australian Radiation Protection and
ISSN: 2231-5381 http://www.ijettjournal.org
Page 340